
How great are wheels, really? Wheels need axles. Suspension. Power of some kind. And roads, or at least swaths of relatively flat and stable terrain. Then you need to maintain all of it. Because of their cost many civilizations across human history, who knew all about wheels and axles, didn't bother using them for transportation. Another way to look at it - much of human technology mimics nature. Of the simple machines, levers, inclined planes, wedges, and even screws are observed in nature. Why not the wheel?
The main competition to wheels are legs, which to be fair are also a total nightmare. Whether using the wetware of a horse's brain or the software of an Atlas robot, legs mean greater demand for computing power to maintain balance under different conditions and loads. Plus the "suspension" gets super complex, often requiring a spine or similar structure that is prone to single-point failure.
So how about jumping? It can take fewer moving parts than rolling or walking, saving weight and removing points of failure. While balancing becomes more critical, it also becomes simpler. Low obstacles become nearly as insignificant as level terrain. And most surfaces you can walk on or roll over, you can also bounce on. The biggest issue is the explosive power required, but even this is being addressed with strategies like stutter jumping.
How common are hopping robots?
There have been many successful jumping robot technology demonstrators, like Salto, LSJR, and prototypes from of MIT's Leg Lab and Sandia Lab's Intelligent Systems and Robotics Center. More common today are robots which can, but do not exclusively, jump, like Sand Flea, RHex, and Festo's Kangaroo. And in the world of toys, jumping robots can be mailed to your home with just a few clicks.
Do you need legs to jump? Not really. Ever played with a "jumping popper?" Researchers at Harvard's Wyss Institute have successfully combined this technology with... explosions and 3-D printing. Another strategy is to gradually spin up and abruptly stop internal flywheels, which comically but effectively flings the rover in a desired direction.
Space Jumping
Since robot jumping is old hat here on Earth, has it been tried on other celestial bodies? Yes! A hopping rover was first launched by the Soviet Union as part of the Fobos 2 mission in 1988, but communication was lost before the PROP-F rover could be deployed on Mars' largest moon. The first robot to successfully hop on another celestial body was a second-generation MIcro/Nano Experimental Robot Vehicle for Asteroid (MINERVA-II). Three MINERVA rovers arrived at the asteroid Ryugu in September of 2018 aboard JAXA's Hayabusa2 spacecraft and successfully jumped around the asteroid using flywheels. Also aboard was the French-German Mobile Asteroid Surface Scout (MASCOT-1), which basically took the technology that your phone uses to vibrate when it gets a text and dialed it up to eleven. MASCOT's internal "swing arm" allowed it to flip over to make sure its instruments were all pointed in the right direction, and make " mini-moves " over Ryugu's surface.
But flywheels and swing arms probably won't work everywhere. Ryugu has a surface gravity of about 1/80,000 of what we experience here on the surface of the Earth. Our Moon's surface gravity is about 1/6 as strong as Earth's, but about 13,000 times stronger than Ryugu's. This makes slipping a greater risk. And unlike Ryugu, the Moon's boulder fields feature relatively large rock fragments scattered across a smooth, sometimes steep, powdery surface. Given the need for ground clearance, agility, good footing, and sudden powerful movements, jumping on the Moon will probably be done by legs. Why reinvent the wheel, right? So to speak.
Apollo 16 Commander John Young jumps off the lunar surface to salute the American flag, photographed by Lunar Module Pilot Charlie Duke. Credit: NASA VideoESA calls for ideas
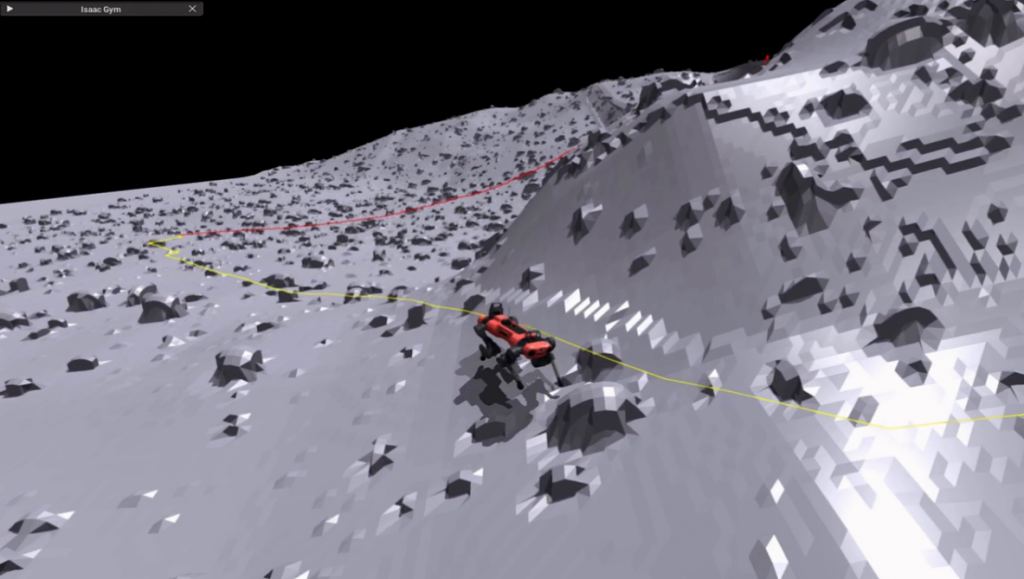
An early-model ANYmal demonstrates its hopping ability. In lunar gravity ANYmal could jump several meters high. Credit: ETH Zürich/Robotics Systems Labs (RSL)In May of 2020 the European Space Agency (ESA) opened a Call For Ideas for Moon missions that could be delivered with a European Large Logistic Lander (EL3). One of the Topical Teams selected for further development, headed by Hendrik Kolvenbach of ETH Zürich, proposed a mission for the Legged Exploration of the Aristarchus Plateau, or LEAP.
Aristarchus Plateau is a geologically diverse region of the Moon, which is a nice way of saying that it has lots of steep hills and boulders. Goldmine for science, minefield for wheeled rovers. The LEAP team identified a suitable platform in ANYmal, a fully autonomous quadrupedal robot. Initially developed by ETH Zürich's Robotic Systems Lab, ANYmal can walk, run, and jump, but in testing has relied increasingly on walking and loping gaits to navigate simulated low-gravity environments. The LEAP team recently presented their progress to date at the 2022 Europlanet Science Congress (EPSC).
Bounding out of the Uncanny Valley
Other robots developed at ETH Zürich have been more specialized for jumping, namely SpaceBok and SpaceHopper. Both show promise in simulated ultra-low gravity environments like what you'd find on Ryugu or similar asteroids and small moons. Ultimately we will likely see a next generation of hopping robots with greater precision than MINERVA or MASCOT, gathering data from what used to be inaccessible moons and asteroids and learning about the early formation of our solar system.
SpaceBok demonstrates its jumping ability. Credit: Robotic Systems Lab SpaceHopper tests its jumping and reorientation abilities in simulated lunar gravity. Credit: SpaceHopperWill the future of space roving have wheels? Almost certainly. But we now live in a solar system where helicopters fly on two worlds. And soon Earth may not be the only celestial body with submarines. The next age of exploration comes with options. Jumping robots will open steep hills, boulder fields, and precarious perches to scientific inquiry like never before. And let's be honest, some of these rovers are absolutely adorable.
For More Information
- A Survey of Bioinspired Jumping Robots, published in Applied Bionics and Biomechanics
- Summary of LEAP presentation at Europlanet Science Congress (EPSC) 2022
- ETH Zürich's Robotic Systems Lab's ANYmal information page
- ANYbotics' ANYmal information page
