Artist rendition of NASA's next-generation Lunar Terrain Vehicle traversing the lunar surface.
(Credit: NASA)
As Artemis II gets ready to launch in November 2024, NASA recently announced it is pursuing contract proposals from private companies for the development of a next-generation Lunar Terrain Vehicle (LTV) to be used for crewed missions starting with Artemis V, which is currently scheduled for 2029. NASA has set a due date for the proposals of July 10, 2023, at 1:30pm Central Time, with the announcement for rewarded contracts to occur in November 2023.
Japan is sending a spacecraft to Phobos to study it and collect samples for return to Earth. A German rover will be part of the fun.
Image Credit: NASA/JPL-Caltech/University of Arizona
Japan and Germany have a history of collaboration in scientific and technological endeavours. The countries have a Joint Committee on Cooperation in Science Technology that has met many times over the decades. Both countries have advanced, powerful economies and sophisticated technological know-how, so it makes sense they’d collaborate on scientific activities.
This time, their cooperation concerns a small, potato-shaped chunk of rock: Mars’ moon Phobos.
The FLEX (Flexible Logistics & Exploration) rover. Credit: Astrolab.
As the Apollo astronauts found out, mobility is everything. Apollo’s Lunar Roving Vehicle (LRV) – sometimes called the Lunar Rover or Moon Buggy – completely changed how the astronauts could explore the lunar surface.
Harrison Schmitt of Apollo 17 said, “Without it, the major scientific discoveries of Apollo 15, 16, and 17 would not have been possible, and our current understanding of lunar evolution would not have been possible.”
A previous launch of the Long March 5, lifting off from Wenchang on July 2nd, 2017. Credit: CNS
In July there’s another launch window to Mars. It looks like China is ready to take advantage of it, by launching their first rover to the planet. It’s called Tianwen-1, meaning “Heavenly Questions”, or “Questions to Heaven.” The complete mission consists of a lander, an orbiter, and a rover.
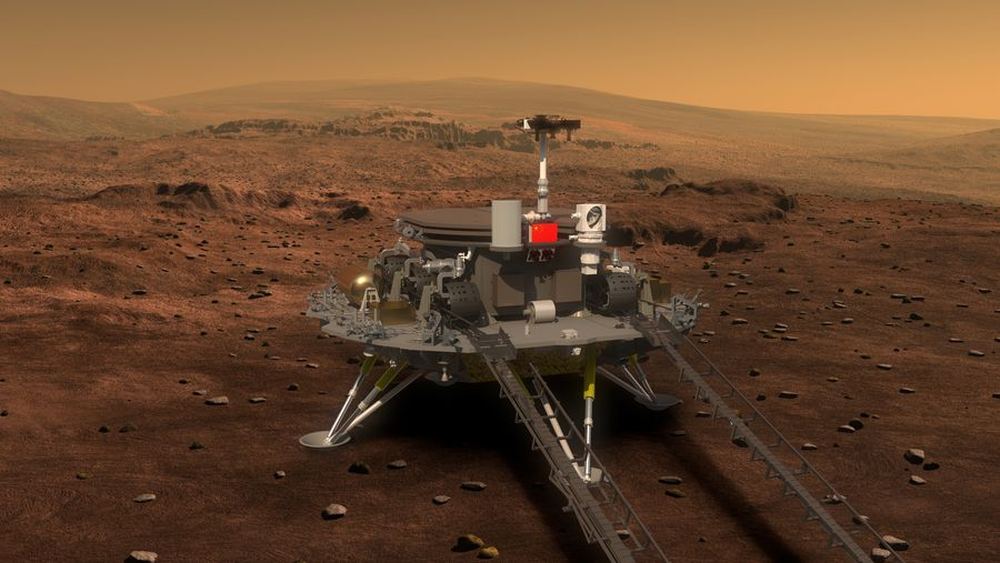
Picture released on Aug 23, 2016 by the lunar probe and space project center of Chinese State Administration of Science, Technology and Industry for National Defence shows the concept portraying what the Mars rover and lander would look like. [Photo/Xinhua]
Friday April 24th was China’s “Space Day,” celebrated on the 50 year anniversary of their first satellite launch. This past Friday, China marked the occasion with the announcement of the name for their first Mars Lander: Tianwen.
According to China’s National Space Administration (CNSA), Tianwen translates to “Quest for Heavenly Truth.”
Artist's impression of the ExoMars Schiaparelli lander passing into Mars' atmosphere. Credit: ESA
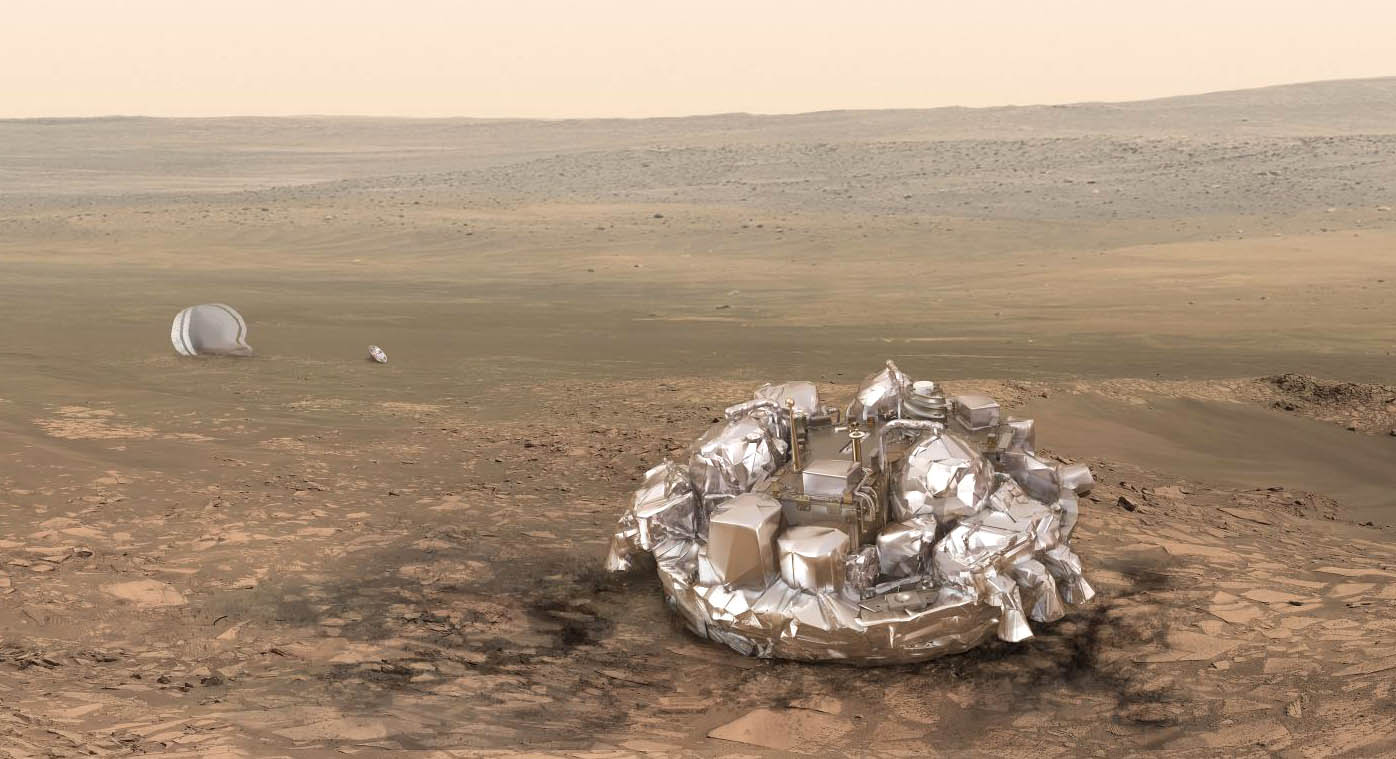
The European Space Agency (ESA) and Roscomos (the Russian federal space agency) had high hopes for the Schiaparelli lander, which crashed on the surface of Mars on October 19th. As part of the ExoMars program, its purpose was to test the technologies that will be used to deploy a rover to the Red Planet in 2020.
However, investigators are making progress towards determining what went wrong during the lander’s descent. Based on their most recent findings, they concluded that an anomaly took place with an on-board instrument that led to the lander detaching from its parachute and backshell prematurely. This ultimately caused it to land hard and be destroyed.
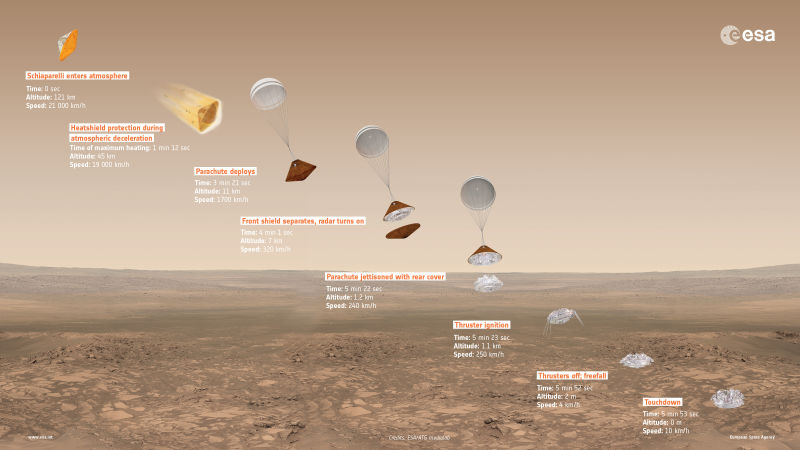
According to investigators, the data retrieved from the lander indicates that for the most part, Schiaparelli was functioning normally before it crashed. This included the parachute deploying once it had reached an altitude of 12 km and achieved a speed of 1730 km/h. When it reached an altitude of 7.8 km, the lander’s heatshield was released, and it radar altimeter provided accurate data to the lander’s on-board guidance, navigation and control system.
Schiaparelli lander descent sequence. According to their investigation, the ESA has determined that an error led the parachute and backshell to be jettisoned prematurely, causing the lander to crash. Credit: ESA/ATG medialab
All of this happened according to plan and did not contribute to the fatal crash. However, an anomaly then took place with the Inertial Measurement Unit (IMU), which is there to measure the rotation rates of the vehicle. Apparently, the IMU experienced saturation shortly after the parachute was deployed, causing it to persist for one second longer than required.
This error was then fed to the navigation system, which caused it to generate an estimate altitude that was below Mars’ actual ground level. In essence, the lander thought it was closer to the ground than it actually was. As such, the the parachute and backshell of the Entry and Descent Module (EDM) were jettisoned and the braking thrusters fired prematurely – at an altitude of 3.7 km instead of 1.2 km, as planned.
This briefest of errors caused the lander to free-fall for one second longer than it was supposed to, causing it to land hard and be destroyed. The investigators have confirmed this assessment using multiple computer simulations, all of which indicate that the IMU error was responsible. However, this is still a tentative conclusion that awaits final confirmation from the agency.
Artist’s impression of the Schiaparelli lander on Mars. Credit: ESA/ATG medialab
As David Parker, the ESA’s Director of Human Spaceflight and Robotic Exploration, said on on Wednesday, Nov. 23rd in a ESA press release:
“This is still a very preliminary conclusion of our technical investigations. The full picture will be provided in early 2017 by the future report of an external independent inquiry board, which is now being set up, as requested by ESA’s Director General, under the chairmanship of ESA’s Inspector General. But we will have learned much from Schiaparelli that will directly contribute to the second ExoMars mission being developed with our international partners for launch in 2020.”
In other words, this accident has not deterred the ESA and Roscosmos from pursuing the next stage in the ExoMars program – which is the deployment of the ExoMars rover in 2020. When it reaches Mars in 2021, the rover will be capable of navigating autonomously across the surface, using a on-board laboratory suite to search for signs of biological life, both past and present.
In the meantime, data retrieved from Schiaparelli’s other instruments is still being analyzed, as well as information from orbiters that observed the lander’s descent. It is hoped that this will shed further light on the accident, as well as salvage something from the mission. The Trace Gas Orbiter is also starting its first series of observations since it made its arrival in orbit on Oct. 19th, and will reach its operational orbit towards the end of 2017.
A mock-up of a future Chinese Martian rover was displayed at the International Industry Fair in Shanghai (Credit: South China Morning Post)
For many space-faring nations, ambitions for Mars run broad and deep. Now, add China to the list of countries with Mars in their sights. News reports from China disclosed that country is considering a future Mars rover mission, with a potential 2020 launch date. Additionally came other hints that China may be looking to develop a next-generation heavy-lift launch system.
This new project, while early in development, reveals how Chinese aspirations are growing rapidly. Human space flight successes have been followed by recent lunar mission successes of the Yutu lunar rover and the Chang’e-5 T1 test of a sample return mission. The Chinese Mars missions could influence future plans of ESA, India and NASA or more simply raise the urgency to execute missions in concept or early development without hesitation.
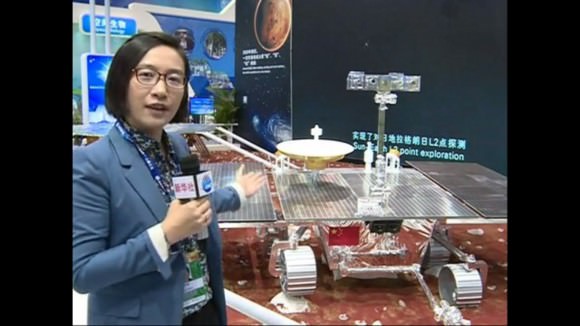
China View reporter Lai Yuchen is seen describing and pointing out the future Sino-Mars rover with plans for a 2020 launch coinciding with the NASA/JPL Mars 2020 rover mission . (Click still image for video Link) (Photo/Video Credit: China View)
The Mars rover mock-up display was presented at the aerospace show by China Aerospace Science and Technology Corporation (CASC). The design appears similar to the Yutu rover which landed successfully on the Moon late in 2013. While Yutu’s mobility system failed prematurely, many mission milestones were achieved.
The Mars rover design is significantly larger than Yutu but includes changes that can be attributed to the challenges of roving Mars at tens of millions of kilometers distance and under more gravitational force. The wheels are beefed up, since it must withstand more force and rugged martian terrain (gravity on Mars is 37% of the Earth’s in strength but 2.25 times the strength of gravity on the Moon’s surface.) The the solar panels are larger due to 1.) less sunlight at Mars – 35% to 50% of Earth’s, and 2.) more electrically demanding instruments.
The goals of the Chinese Mars rover will be to search for life and water. The NASA missions searching for indicators of habitable environments and for water has cost billions of dollars but the Chinese space program is operating on a fraction of what NASA’s annual budget is. Whereas the Chinese Mars program will be competing with the lunar program for government funds, it remains to be seen how quickly they can make progress and actually meet milestones for a 2020 launch date.
Besides video of the China View reporter presenting and discussing the Mars rover (link to photo above), the video also includes a simulation of the Chinese lunar sample return spacecraft, which is underdevelopment and was tested early this month during a the Chang’e-5 T1 circum-lunar mission that proved a small re-entry vehicle.
The future Chinese rover would be nearly as large as the MER rovers. Full scale models of all three NASA/JPL Mars rovers are shown here – Mars Pathfinder, MER and MSL in a JPL Mars yard with engineers. (Photo Credit: NASA/JPL)
The actual dimensions of this rover were not reported but an estimate of the size can be determined by the size of the high-gain directional antenna. Assuming it is an X-Band dish, like the one on the MER Rovers and Curiosity, then this Sino-rover would be near the same size as the MER rovers – Spirit and Opportunity. The Sino-rover shares a six wheel design like MER and MSL rovers.
Other reports from the China Daily indicated that industry leaders in China are urging China’s space agency to develop a more powerful heavy-lift launch system. It could be used for the nation’s human spaceflight goals to send a space station in to orbit, as well as send missions to Mars and beyond.
“It is a must for us to develop a more powerful heavy-lift rocket if we want to reach and explore deep space,” Zhang Zhi, a senior rocket researcher at the China Academy of Launch Vehicle Technology the aerospace exhibition.
Plans also call for an orbiter to likely function as a communication relay as MGS, Mars Odyssey and MRO have done for the American rovers. Whether this would involve a single spacecraft such as the NASA Vikings or dual crafts such as the present American rovers with supporting orbiters is unknown. Given the successful landing of the Yutu rover encapsuled in a soft-lander, one might expect the same for the Chinese Mars rover rather than an airbag landing used by MER. Either way, they will be challenged by the seven minutes of terror just like the American rovers. They will have to solve for themselves the entry, descent and landing of a rover. Only American-made rovers have successfully landed on Mars; all Russian attempts have ended in failure.
The Chinese Lunar Sample Return mission is show in simulation in the China View video. This mission would pave the way for a Chinese Mars sample return by 2030. (Photo Credit: China View)
The presentation also stated future plans for a sample-return mission by 2030. If the first Chineses Mars rover lands successfully in 2020, it will join up to four active rovers on the surface. Curiosity, ExoMars (ESA/NASA), Mars Rover 2020 and MER Opportunity. Six years seems like a long time but MER’s Oppy is a proven trooper having lasted over ten years. Curiosity, barring the unexpected, might last beyond 2020. ExoMars and NASA’s 2020 rover are still in development phases. Using ExoMars or 2020, NASA has plans to recover collected samples from rovers and return them to Earth in the 2020s and possibly as soon as 2022.
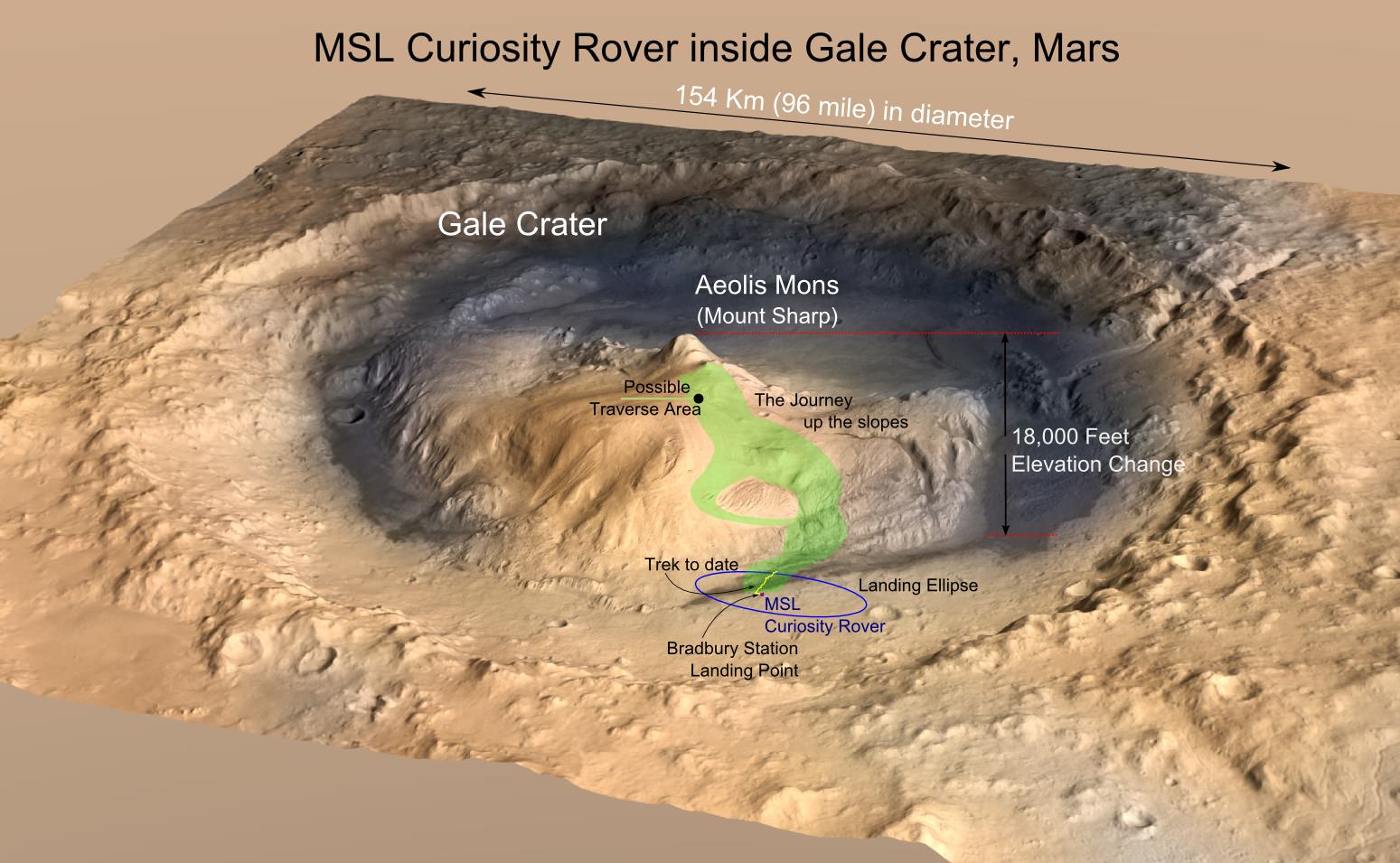
MRO image of Gale Crater illustrating the landing location and trek of the Rover Curiosity. Curiosity's images and data show that the Gale Crater held water for much longer than thought. (Credits: NASA/JPL, illustration, T.Reyes)
Scientists at the Jet Propulsion Laboratory have announced that the Mars Science Lab (MSL), Curiosity Rover, has reached the base of the central peak inside Gale Crater, Aeolis Mons also known as Mount Sharp. Mount Sharp is a prime objective of NASA’s Curiosity journey. The mountain is like a layer cake, holding a chronology of past events, one after the other, stacked upon each other over billions of years. It took two years and one month to reach this present point and what lies ahead is the beginning of an upward trek towards the peak of Mount Sharp, 5500 meters (18,000 feet) above the floor of Gale Crater. However, it is worth a look back and to consider what Mount Sharp represents to the mission.
For over 17 years, NASA robotic spacecraft have maintained a constant presence above or upon the surface of Mars. The Mars Pathfinder mission arrived on July 4, 1997, then quickly followed by Mars Global Surveyor on September 11 and since this time, there has always been at least one active Mars mission.
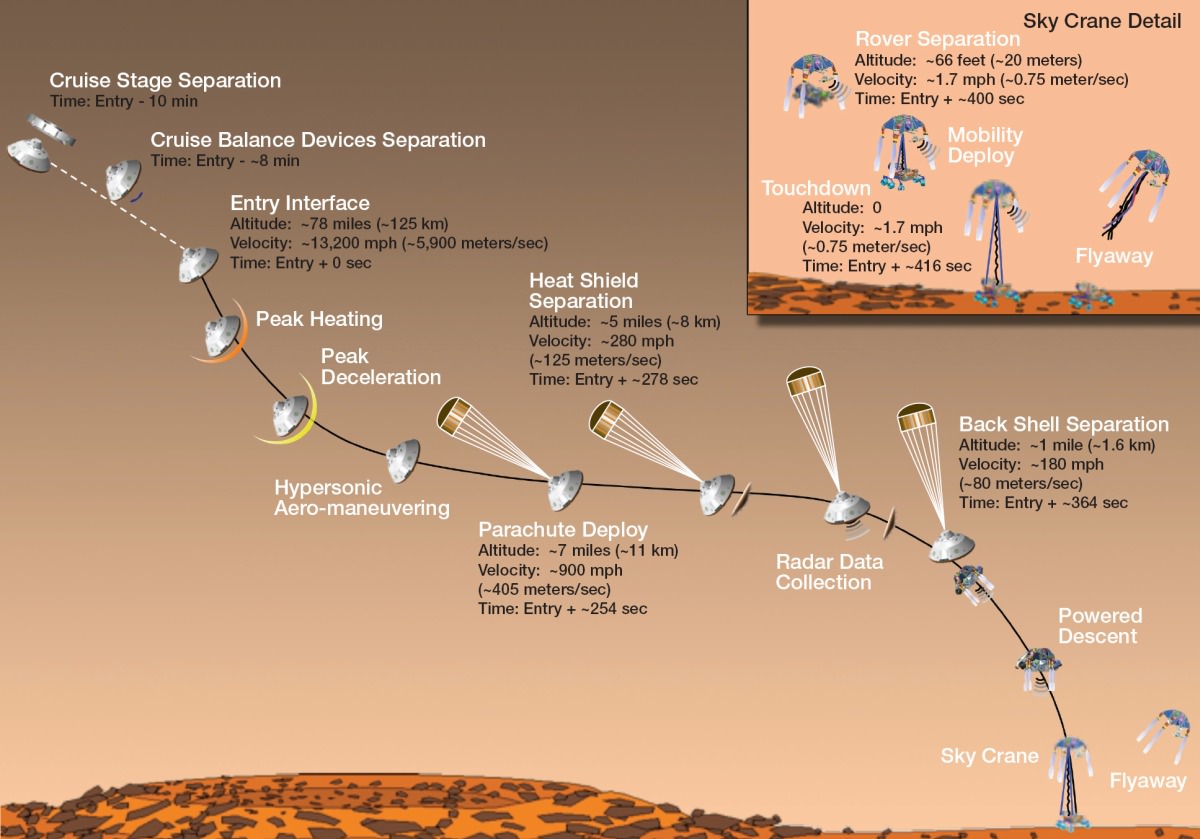
“Seven Minutes of Terror” – the Entry, Descent and Landing (EDL) of the Mars Science Lab (MSL) – Mars Curiosity Rover. (Credit: NASA/JPL)
On November 26, 2011, the voyage of Mars Curiosity Rover began as a trek across 320 million kilometers (200 million miles) of the inner Solar System and culminated in the coined “Seven Minutes of Terror”. For seven long minutes, the MSL, the Mars Curiosity Rover, plowed straight into the Martian atmosphere – the entry, deployed a parachute – the descent, to slow down to about 320 km/hour (200 mph) then the Sky Crane with Rover under foot was released – the landing. With only seconds before an imminent hard impact, the Sky Crane hit the breaks, firing its rockets, then released Curiosity Rover on a tether. This was the Entry, Descent and Landing (EDL). All the while, it was the computer inside the Rover in control. When the tether was cut, the Sky Crane was forced to switch to a simpler processor within its system to complete a final scuttling of itself a few hundred meters away.
The Sky Crane gently lowered Curiosity to the landing point, christened Bradbury Station after the celebrated science fiction writer, Ray Bradbury, writer of the Martian Chronicles(c.1950), who passed away at age 91, 61 days before the landing on August 5, 2012. (recommended video – R. Bradbury reading “If Only We had been Taller” at the public event marking the arrival of Mariner 9 at Mars, November 12, 1971)
The ultimate Selfie – a self-protrait taken on anoher planet. This is the capability of the Mars Hand Lens Imager (MAHLI) camera, one of 5 instruments on the turret at the end of the 2.1 meter (7 ft), 30 kg (66 lb) Robotic Arm. On numerous occasions, Curiosity has taken self-portraits, many as mosaics. This on is on Sol (Mars day) 85, post landing, showing Curiosity with its destination – Aeolis Mons (Mt. Sharp) in the background. (Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/Marco Di Lorenzo, “Curiosity Celebrates 90 Sols Scooping Mars and Snapping Amazing Self-Portrait with Mount Sharp“)
September 27, 2012: A rock outcrop called Link pops out from a Martian surface taken by the 100-millimeter Mast Camera on NASA’s Curiosity Mars rover September 2, 2012. Rounded gravel fragments, or clasts, up to a couple inches (few centimeters) in size are in a matrix of white material. The outcrop characteristics are consistent with a sedimentary conglomerate, or a rock that was formed by the deposition of water and is composed of many smaller rounded rocks cemented together. Scientists enhanced the color in this version to show the Martian scene as it would appear under the lighting conditions we have on Earth, which helps in analyzing the terrain. (NASA/JPL-Caltech/MSSS/Handout/Reuters)
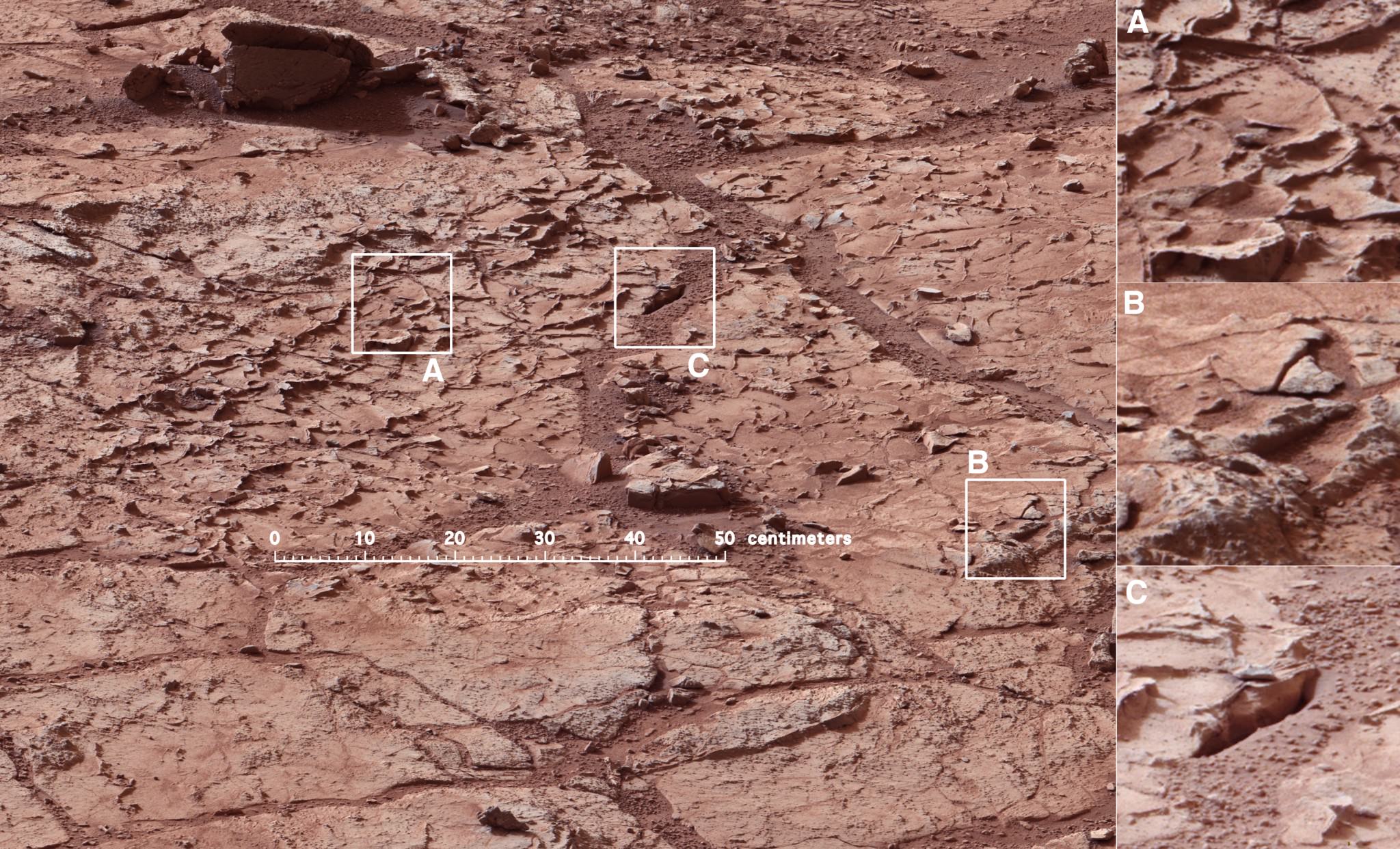
Mars Curiosity at the “John Klein” site in Yellow Knife Bay on January 10, 2013 (Mars Sol 153). The Mastcam mosaic was taken from 5 meters (16 ft). The area is full of fractures and veins with intervening rock with concretions (small spherical concentrations of minerals). The enlargements show particular areas of interest. (A) Ridge-like veins protruding from the surface. (B) Shows discontinuities in the veins that likely extend beneath the surface. (C) Shows a hole developed in the sand that overlies a fracture, implying infiltration of sand down into the fracture system. To this author, the area around (A) seems similar to the remnants of dried mud chips or scales one finds in the dry areas of estuaries on Earth. (Credits: NASA/JPL)
What has followed in the last 25 months since the landing is simply staggering. Mars Curiosity Rover, with the most advanced array of instruments and tools ever delivered to a celestial body, has already delivered an immense trove of images and scientific data that is improving and changing our understanding of Mars.
HIRISE images from the orbiting MRO spacecraft are used to show the old and new routes of NASA’s Mars Curiosity rover. The new route provides excellent access to many features in the Murray Formation. And it will eventually pass by the Murray Formation’s namesake, Murray Buttes, previously considered to be the entry point to Mt. Sharp. (Credit: NASA/JPL-Caltech/Univ. of Arizona)
Curiosity had been making progress towards an entry point to Mount Sharp called Murray Buttes, however, because of challenges that the terrain posed – sand dunes and treacherous rocks, they have chosen to enter at Pahrump Hills. Furthermore, the new entry to the lower slopes of Mount Sharp are considered scientifically more interesting. The boundary between the mountain and the crater-floor deposits is not an exact one but NASA scientists explained the reason for the announcement at this point:
“Both entry points lay along a boundary where the southern base layer of the mountain meets crater-floor deposits washed down from the crater’s northern rim.” The terrain is now primarily material from the mountain from here on upward.
Image taken by the MastCam of Curiosity Rover on August 23, 2012 which shows the buttes representing the base of Mount Sharp, including Murray Buttes. Today, two years later, Mars Curiosity now stands at entry points in the region of the buttes at 6.6 km (direct line distance). In the middle of the image is the boulder-strewn area in which much of Curiosity’s wheel damage occurred. At top are the expansive series of sendiments that is the great interest of Mars researchers. (Credit: NASA/JPL)
Mount Sharp is anything but the normal central peak of an impact crater. Gale crater at 154 km (96 miles) in diameter is what is called a complex crater. Beyond a certain size, depending on the gravity of the planet, craters will have a central peak. It is similar to the spike of water which is thrust upwards when you drop an object into a pool of water. Like the spike of water, an impact, thrusts regolith upwards and it collapses and coalesces into a central peak. However, with Mount Sharp there is something more. If the peak was nothing but a central impact peak, NASA with Mars Curiosity would not be trekking inside Gale Crater.
As data and analysis has accumulated from not just Mars Curiosity Rover but rather from all the active Mars missions, the models and hypotheses describing the structure and morphology on Mars have become more complex. This model and explanation of how Mount Sharp built up over billions of years uses deposition of ice and dust. Click to enlarge and review the five steps to making a layer cake mountain – Mount Sharp. (Credit: Illustration presented by Paul Niles (NASA Johnson Space Center) and Joseph Michalski (Planetary Science Insitute, UK)at the 43rd Lunar and Planetary Science Conference, The Woodlands, Texas)
Mars scientists believe that Gale crater after its creation was completely filled with sedimentary material from a series of huge floods passing over the surrounding terrain or by dust and ice deposits such as happened at the Martian polar caps. The deposition over 2 billion years left a series sedimentary layers that filled the crater.
Following the deposition of the layers, there was a long period of erosion which has finally led to the condition of the crater today. The erosion by some combination of aeolean (wind) forces and water (additional flooding), scooped out the huge crater, re-exposing most of the original depth. However, covering the original central peak are many sedimentary layers of debris. Gale crater’s original central peak actually remains completely hidden and covered by sedimentation. This is what has attracted scientists with Curiosity to the base of Mount Sharp.
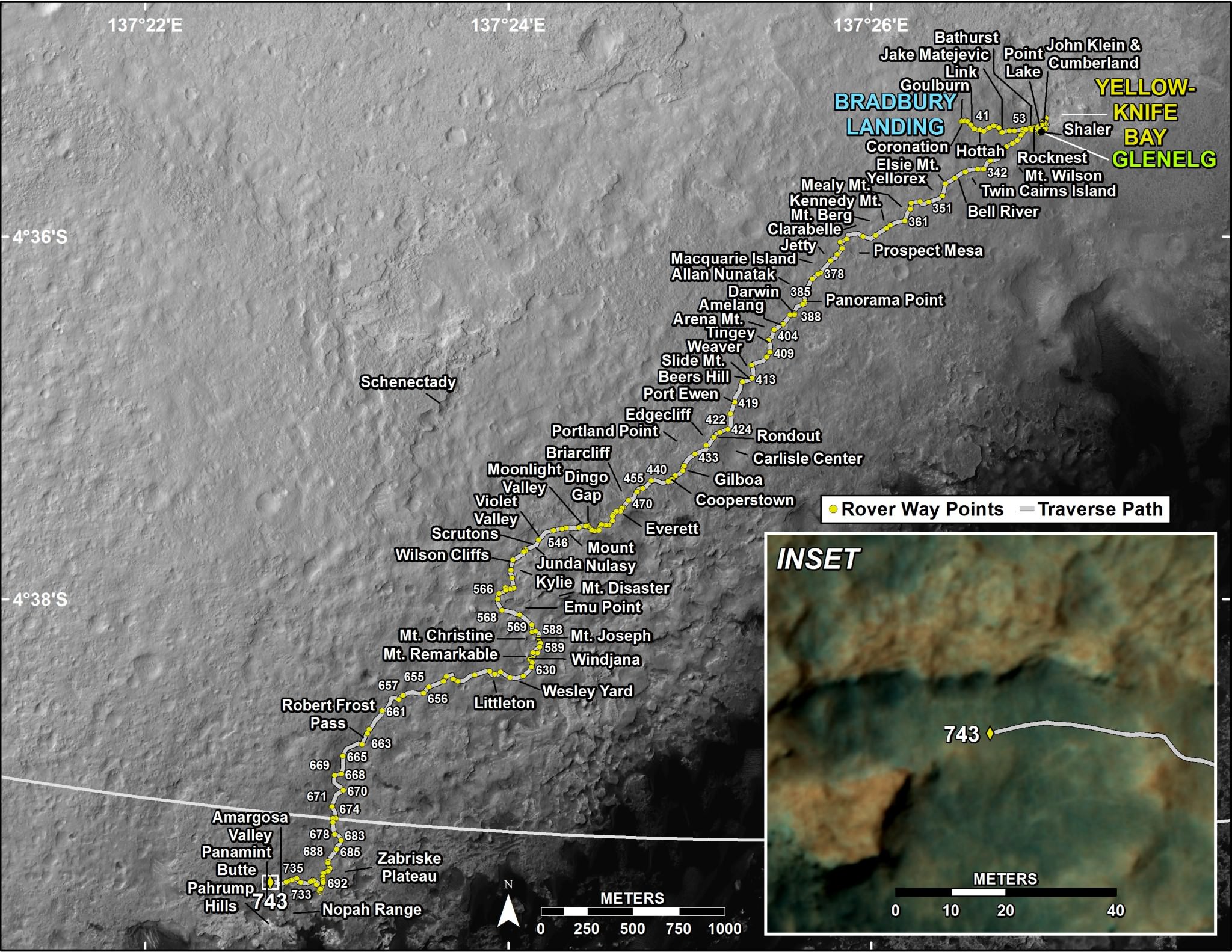
The trek of NASA’s Curiosity Rover from Bradbury Station (landing site, Sol 1) up to Martian Sol 743. The announcement that Curiosity had reached the base of Mt. Sharp is Sol 746. On Martian Sol 675, the Rover took its first step beyond its landing ellipse. (Credit: NASA/JPL)
Within the sedimentary layers covering Mount Sharp, there is a sequential record of the events that laid down the layers. Embedded in each of those layers is a record of the environmental conditions on Mars going back over 2 billion years. At the base are the oldest sedimentary layers and as Curiosity climbs the flanks of the mountain, it will step forward in time. The advanced instrumentation residing on and inside Curiosity will be able to analyze each layer for material content and also determine its age. Each layer and its age will reveal information such as how much water was present, whether the water was alkaline or acidic, if there is any organic compounds. The discovery of organic compounds on Mount Sharp could be, well, Earth shaking. There are organic compounds and then there are organic compounds that are linked to life and this search for organics is of very high importance to this mission.
Already, over the two year trek, Curiosity has seen numerous signs of the flow of water and sedimentation. At its first major waypoint, Glenelg, Curiosity stepped into an area called Yellow Knife Bay that showed numerous signs of past water. There were veins of magnesium salt deposits embedded in the soil, sedimentation and even conglomerate rock such as that found in river beds.
In late 2013, wear and tear accelerated on Curiosity’s wheels, the result of crossing boulder-strewn terrain. Clearly signs of punctures, tears and dents are seen in the photo taken by Curiosity performing a self-inspection. While it certainly raised alarm, mission planners remain confident that it can be handled and will not limit the duration of the mission.(Credits: NASA/JPL)
There is another side to the terrain that Curiosity is traversing. The crater floor, essentially a flood plain has been particularly hard on the mobility system of Curiosity. This is to say that the sharp rocks it continues to encounter under foot are taking a toll on the wheels. Curiosity is now being operated in reverse in order to reduced the impact forces on its wheels.
Furthermore, while scientists are helping to choose the path of the rover, the Curiosity drivers who must assess the field ahead must find paths with fewer sharp rocks in order to slow the damage being done. The Mars Curiosity team is concerned but remain confident that the mobility system will be capable of surviving the ten year life span of the rover’s power supply. So, the momentous occasion is hardly a time to pause and reflect, the trek moves upward, northward to see what the layers on Mount Sharp will reveal.
There are competing hypotheses on how Mount Sharp evolved. Here are two worthy web pages with additional reading.
Earth eclipses the sun from Chang'e 3's location in the Sea of Rains on April 15, 2014. At the same time, we'll see a total lunar eclipse from the ground. Stellarium
Last night I used my telescope to eye-hike the volcanic plains of the Sea of Rains (Mare Imbrium) where the Yutu rover and lander sit beneath a blistering sun. With no atmosphere to speak of and days that last two weeks, noontime temperatures can hit 250 degrees Fahrenheit (122 C) . That’s hot enough that mission control at the Beijing Aerospace Command and Control Centerhas decided to draw the shades and give the rover a nap from science duties until December 23 when things cool down a bit.
While studying the subtle gray hues of the Imbrium lava flows I got to wondering what the sky might look like if I could don a spacesuit and visit the landing site “where the skies are not cloudy all day” (to quote a famous song). With no atmosphere to speak of, stargazing can be done both day and night on the moon though I suspect it’s better at night when there’s less glare from your surroundings. Night, defined as the time from sunset to sunrise (no twilights here), lasts about 14.5 Earth days. Days are equally long.
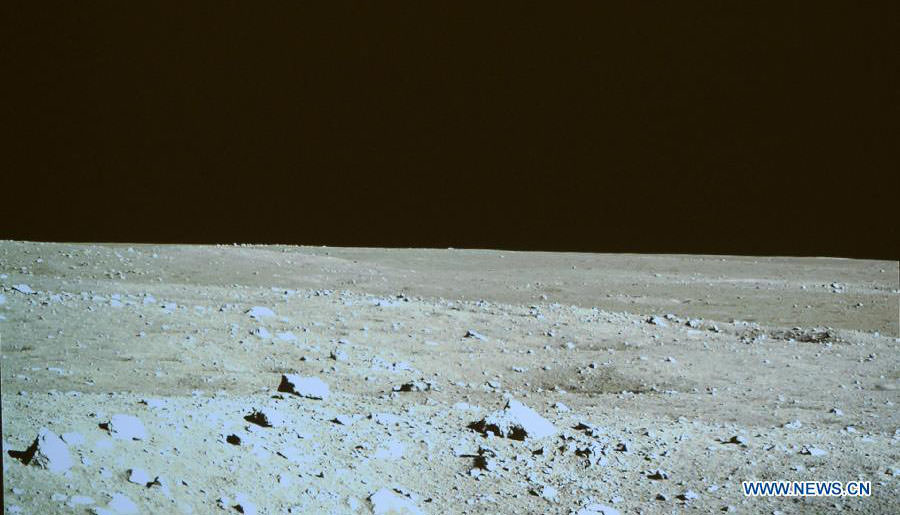
Lunar landscape photographed by the Chang’e 3 lander on Dec. 15, 2013. Credit: CCTV
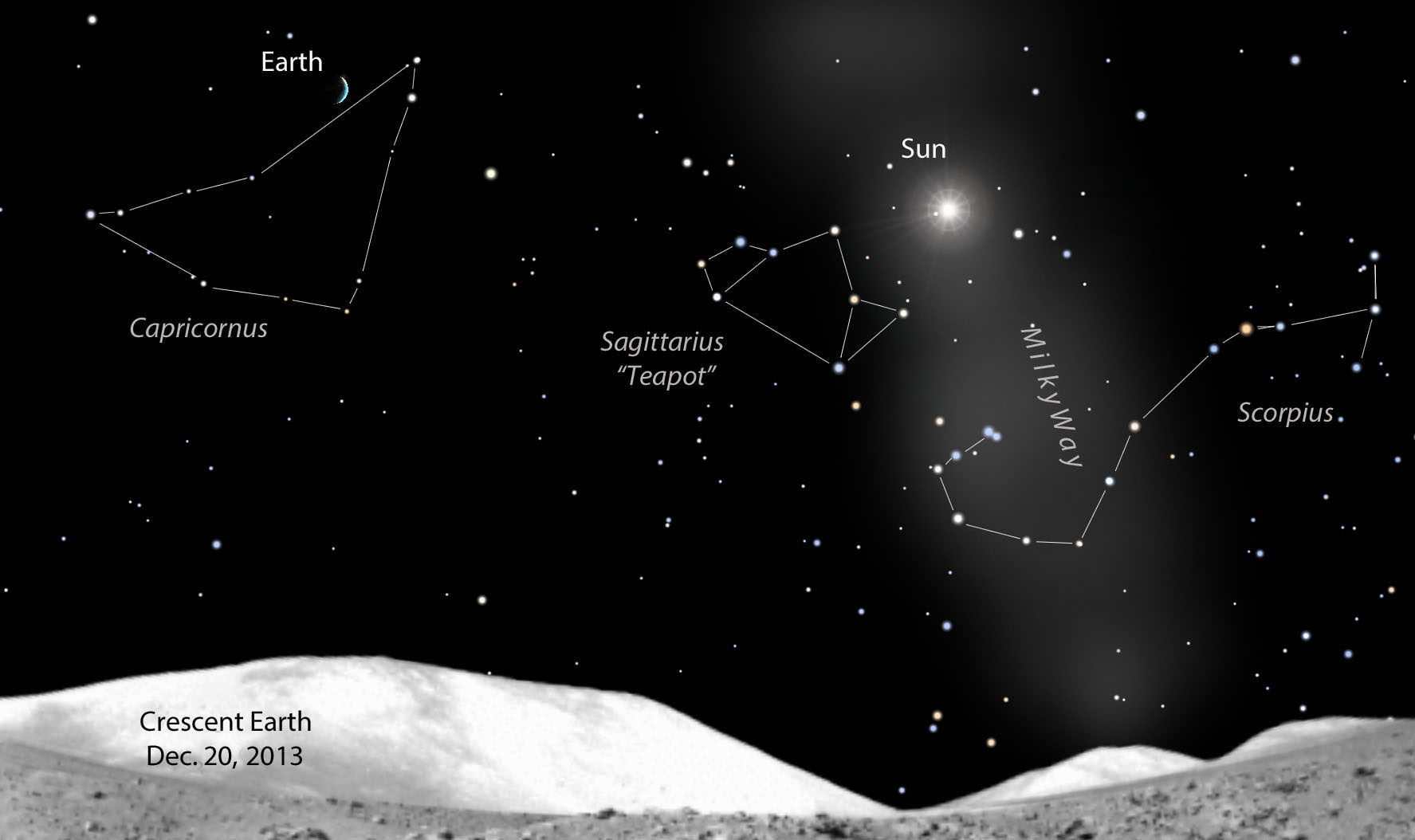
From Yutu’s point of view, it’s very nearly lunar noon today (Dec. 19) with the sun halfway up in the southern sky. Looking at the map of the sky from the lander’s location, you’ll see a few familiar constellations and one very familiar planet – Earth!
Phases of the moon and Earth are complementary. When the moon is full, Earth’s a crescent. This map shows the Earth in Capricornus on Dec. 20 as thin blue crescent. Stellarium
Today Earth appears as a very thin crescent a short distance to the left or east of the sun. Because the moon takes just as long to rotate on its axis as it does to revolve around the Earth, the same face of the moon always faces our planet. Because the two are in synchrony, astronomers call it synchronous rotation.
From the perspective of someone standing on the moon, Earth stands still in one spot of sky throughout the 29.5 day lunar day-night cycle. Well, not perfectly still. Because the moon’s orbit is inclined about 5 degrees to Earth’s orbit and its speed varies along its non-circular orbit, Earth describes a little circle in the lunar sky about 10 degrees in diameter every four weeks.
As the sun slowly moves off to the west, our blue planet remains nearly stationary from Yutu’s perspective and undergoes all the familiar phases we see the moon experience back here on Earth: an evening crescent to start followed by a first quarter Earth, Full Earth last quarter and finally, New Earth. I like the ring of that last one.
The lunar landscape at the rover’s location is bathed in pale blue light on Dec. 31, 2013 during a Full Earth. Stellarium
Yutu and the lander will see the sun drift to the west while Earth moves east, rises higher in the lunar sky and putting on the pounds phase-wise. Today Earth’s glides across the border of Sagittarius into Capricornus. The next Full Earth happens on New Year’s Eve when the sun is directly opposite the Earth in the lunar sky.
Full Earth always happens around local midnight or about one week before sunrise during the long lunar day. On the moon the sun is up for about two weeks and then disappears below the horizon for another two weeks before rising again. At Full Earth time, the sun remains hidden around the lunar backside. When the nights are blackest, the bright ball of Earth spreads a welcome blue glow over the desolate landscape.
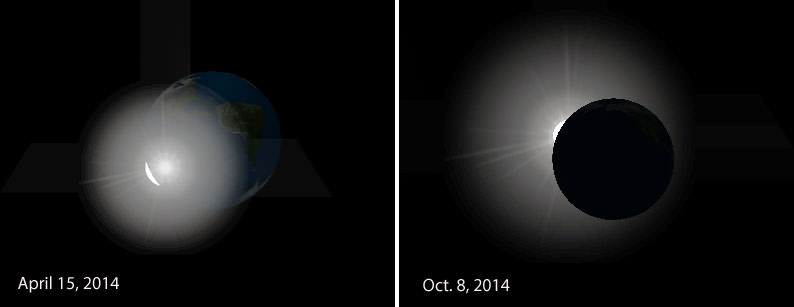
Simulated eclipse of the sun by the Earth just before totality on April 15 and Oct. 8 next year. On both dates, we’ll see a total lunar eclipse from the ground. Stellarium
Things really get interesting during lunar eclipses when the moon moves behind the Earth into the planet’s shadow. The next one’s on April 15, 2014. Here on the ground we’ll see the moon gradually munched into by Earth’s shadow until totality, when sunlight from all the sunrises and sunsets around the rim of the planet are refracted by the atmosphere into the shadow, coloring the moon a coppery red.
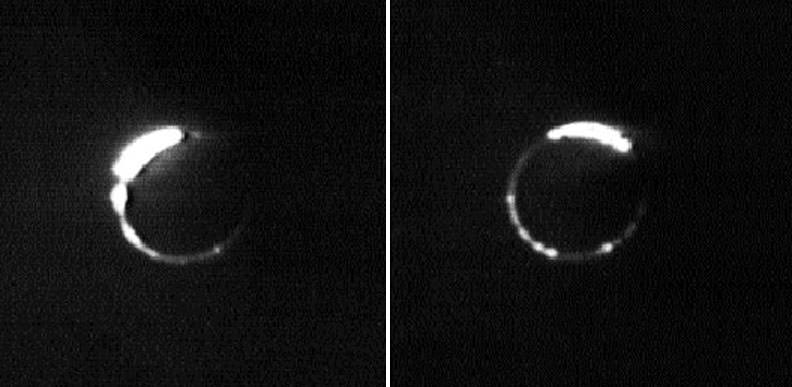
Two pictures of the ring of sunset-sunrise fire around the Earth as it totally eclipsed the sun from the moon. Credit: NASA
Yutu will see just the opposite. Looking back toward the Earth from inside its shadow, the rover will witness a total eclipse of the sun by the Earth. If by some wonder the Chinese are able to photograph the event, we’ll see photos of the black ball of Earth rimmed in red fire from sunset and sunrise light refracted by our atmosphere. My interpretation using sky mapping software only hints at the wonder of the scene. Beijing Aerospace, if you’re reading this, please make it happen.
Earth eclipses the sun filmed by Japan’s Kaguya lunar orbiter. There are really two eclipses here – the Earth eclipsed by the limb of the moon at the video’s start followed by the solar eclipse.
On two other occasions, our robotic emissaries have photographed solar eclipses from Luna. NASA’s Surveyor 3 snapped a couple crude pictures of the April 24, 1967 eclipse from inside a crater in Mare Cognitium, the Sea that has Become Known. Japan’s orbiting Kaguya probe did the job much more eloquently on video during the February 9, 2009 penumbral lunar eclipse. In a penumbral eclipse (seen from Earth) the moon misses Earth’s dark inner shadow called the umbra, passing only through the outer penumbra, but because the Earth is three times larger than the sun (seen from the moon), it easily covered the sun completely in the complementary total solar eclipse.
And the best thing about watching eclipses from the moon? Guaranteed clear skies!