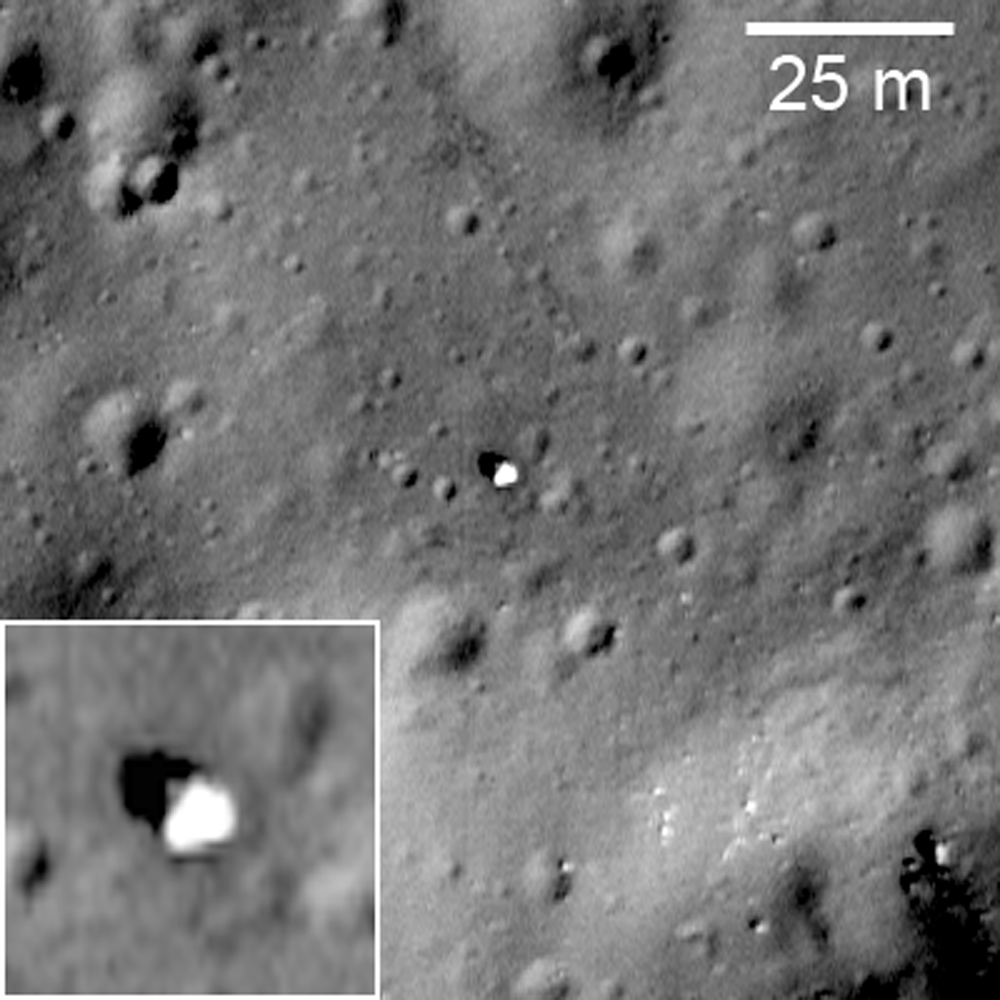
Here’s a look down at Curiosity from the HiRISE camera aboard NASA’s Mars Reconnaissance Orbiter, orbiting approximately 200 km (125 miles) above the surface of Mars. This new image, released today, shows the rover inside Gale Crater surrounded by a skirt of blue-tinted material, including several bright radiating marks –the result of the descent stage rockets clearing layers of dust from the surface.
 In this exaggerated-color view the blue indicates material of a different texture and composition than the surrounding area. HiRISE captures images in visible light wavelengths as well as near-infrared, which we can’t see. To us, the blue material would look grey.
In this exaggerated-color view the blue indicates material of a different texture and composition than the surrounding area. HiRISE captures images in visible light wavelengths as well as near-infrared, which we can’t see. To us, the blue material would look grey.
North is up, and Curiosity’s ultimate exploration target, Gale Crater’s central peak, Mount Sharp, is off frame to the lower right.
Click here for a full-size version of the HiRISE image scan, showing the scene above plus some areas further north and south — including portions of the dark dune fields visible in recent images from Curiosity.
It’s nice to know that Curiosity has friends in high places!
Image: NASA/JPL/University of Arizona