
The Moon may seem barren, and it is. However, a certain species of inquisitive primates is still very interested in exploring the Moon, uncovering its secrets and maybe establishing a longer-term presence there. But thirsty primates need water, and there's only one primary source on the Moon: the frozen water in shadowed craters at the lunar poles.
We've been to the Moon before. Now we're aiming for the Moon again. This time we'd like to stay longer. But to do that, we'll need help from our advanced tools. One of those advanced tools is rovers, and they'll play a critical role in exploring the Moon.
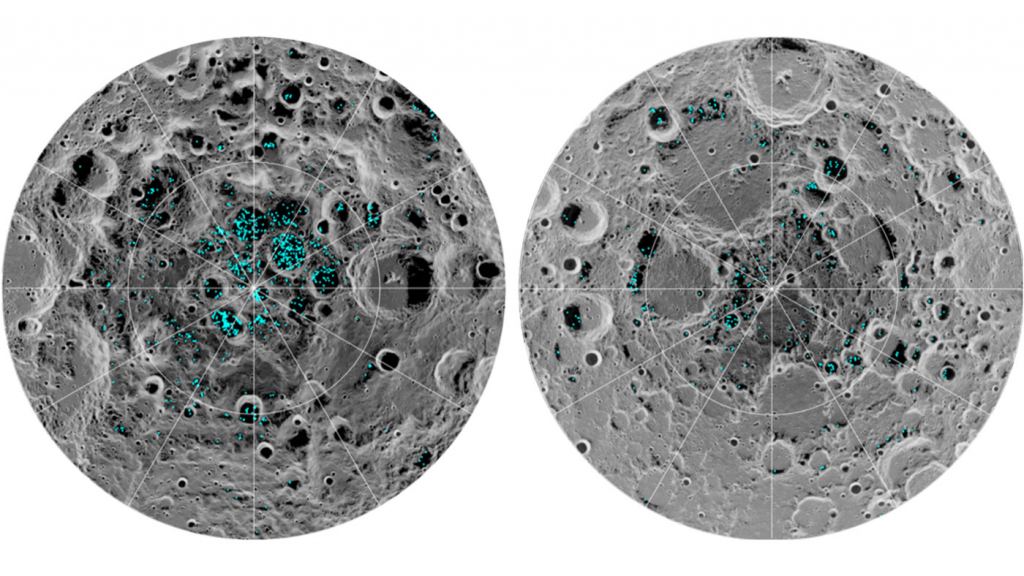
Recent research shows frozen water spread around different areas on the Moon. But it's the poles that are the most promising source, especially the lunar south pole. Craters on the south pole are in permanent shadow, and the water ice and other volatiles there date back to the Solar System's formative years.
That water is vital for any human habitation on the Moon. It's impossible to transport large quantities of water there, so in-situ water extraction is necessary. We need water to drink. But we can also split water into oxygen and hydrogen. Oxygen for breathing and plant propagation, and hydrogen for rocket fuel.
But before we can rely on frozen water in shadowed craters, we need to learn much more about it and the terrain that harbours it. We need lunar prospectors in the form of rovers. This is where the ESA and ESRIC (European Space Resources Innovation Center) come in.
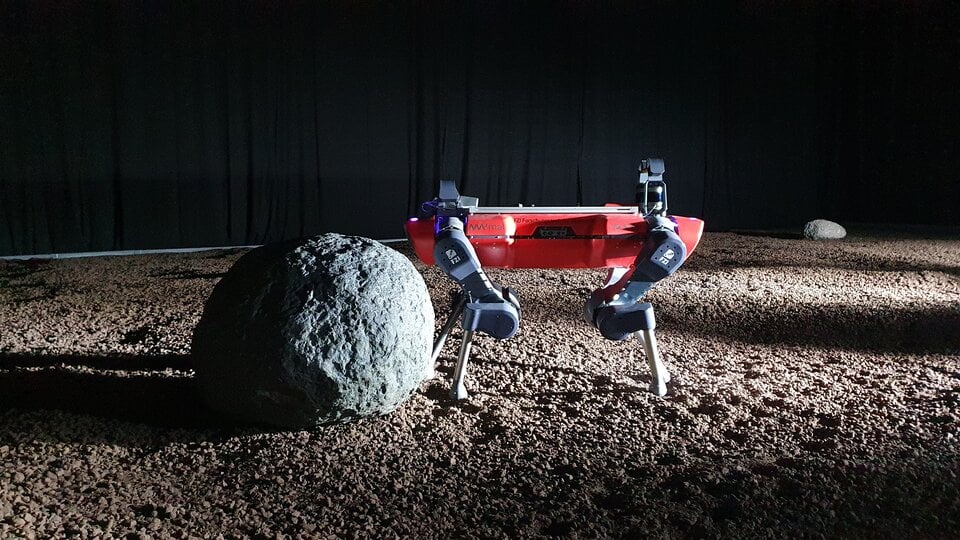
The ESA and ESRIC challenged Canadian and European companies to compete in a lunar rover challenge. ESRIC put rovers from twelve teams through their paces in a simulated lunar environment in a former aircraft hangar in the Netherlands. The lunar pole region is much different than the flat highland regions the Apollo missions landed in. The lunar south pole is pockmarked with craters and is side-lit by the Sun, which barely rises above the horizon.
The organizers spread 200 tons of lava rock around the hangar to simulate that environment. Then they spread rocks around, and 100 larger boulders more than one meter across, each one precisely geolocated.

ESRIC gave the boulder locations to the rover teams on a map that simulated an orbital map. The maps showed the teams the large-scale features they had to navigate, but smaller-scale features were left as surprises. This mimicked an actual mission, where orbital maps can prepare rovers for their mission on the surface, but no completely. The simulated moonscape was concealed behind a black curtain so that the teams could only see the environment through their rovers' sensors.
"The competing rovers had to navigate and map the whole test environment to prospect for useable resources – meaning first of all to track down their location, identify the best and safest passages to access them, then to gather information about the characteristics and the composition of the rocks they find," explained Massimo Sabbatini, who oversaw the contest's first phase for ESA.
"The various teams took various approaches in terms of locomotion – we had wheeled, tracked and also walking vehicles – as well as visual and multi-spectral instrumentation, and in a few cases multiple instead of single rovers. The five out of 12 teams who move forward to the next stage receive a development grant to increase their technology readiness ahead of the second stage challenge, hosted by ESRIC in Luxembourg this autumn."

Each team had 2.5 hours to complete the tasks. Their rover had to traverse the obstacles in the moonscape on the way to a crater, then prospect for resources. The requirements were challenging, and not every team was successful. Some rovers had insufficient lighting, others ran out of power, and other teams had difficulties communicating with their rovers.
"Not everyone made it to the crater at all: some groups found they didn't have sufficient lighting on their rovers, others suffered battery problems," Sabbatini said. "A few had difficulties with the artificial signal delay we included, which simulates the actual experience of teleoperating to the Moon. But it's fair to say that everyone learned a lot – including us."
Franziska Zaunig is a co-organizer who is overseeing the second phase of these rover trials for the ESA. Zaunig said that all of the competing teams found the experience positive, even those who didn't advance to the next phase.
"Everyone got a practical, high-pressure try-out of their technologies, helping highlight any features that still need improvement," Zaunig said.

Five teams made it out of this round. Each of the teams won €75 000 contracts to develop their rovers further. Next fall, the five teams will compete in the following round in Luxembourg from September 7th to the 9th. That challenge will be similar to this one, with teams mapping out a simulated lunar environment in a set period of time.
Bob Lamboray is the ESRIC Strategic Advisor and Project Manager. "ESRIC is looking forward to welcoming these five winners from this phase to Luxembourg," Lamboray said. "Through the ESRIC prize, we will support the final winner to further mature their design and hopefully make it to the Moon in the near future."

Dr. Matt Cross is a systems engineer at Mission Control, the Canadian team that advanced to the next round. "I'm excited to continue to the next round of the Space Resources Challenge!" said Cross. "It provides a unique opportunity to test our mission operations in a previously unseen environment just like we will experience when operating a rover in the south lunar polar regions. We are excited to advance our operations software to meet what we expect will be an even greater challenge!"
The ESA is working on the European Large Logistics Lander (EL3) mission, which could make it to the Moon as soon as 2028. It's in the concept and design phase, but if it goes ahead, EL3 will be a versatile lander capable of delivering different payloads to the Moon. One of those payloads will be a rover.
There are critical differences between the historic Apollo Moon missions and upcoming missions like Artemis. The Apollo astronauts worked in full daylight and never spent a night in the cold darkness on the Moon. But future missions, especially to the perpetually shadowed south pole, will have to contend with cold and darkness. This requires robust rovers with ample power and lighting, among other things. One of the rovers in these challenges could end up being the precursor to the eventual rover that EL3 takes to the Moon.
The five teams that are proceeding to the next phase are:
- ETH Zurich & University of Zurich (Switzerland)
- ?ukasiewicz – PIAP (Poland)
- FZI Forschungszentrum Informatik (Germany)
- Space Application Services & Universite Du Luxembourg & Dynamic Imaging Analytics & La Palma Research Centre & University de Lorraine & The Open University (Belgium/Luxembourg/UK/Spain/France)
- Mission Control Space Services (Canada)
More:
- Press Release: Winning rovers of lunar polar challenge
- ESA: European Large Logistics Lander
- Wikipedia: Lunar Water