
The ESA has spent the past few years working towards the creation of an international lunar base, something that will serve as a spiritual successor to the International Space Station (ISS). To accomplish this, they have enlisted the help of other space agencies and contractors to develop concepts for space habitats and construction methods as well as ways to provide robotic and logistical support.
Recently, the ESA's Technology Development Element (TDE) signed on with the French technology developer COMEX to create the TRAILER robotic system. This two-year project will test a new mission architecture where two rovers work in tandem (and with the help of astronauts) for the sake of exploring the lunar surface and building a permanent outpost on the Moon.
The TRAILER system will leverage a number of recent advancements in the fields of robotics, remote operation, and autonomy software. The tandem robots are designed to be operated from Earth or from a base in lunar orbit - i.e. the Lunar Gateway. However, they will also be required to operate autonomously for stretches of time and perform tasks without astronauts overseeing them.
Ultimately, TRAILER is designed to test robotic explorer systems that consist of two elements, known as TRACTOR and WAIN. The first calls for an agile rover element that will be capable of venturing out onto the surface for short periods of time, obtaining samples for analysis, and communicating via a local wireless transceiver.
Meanwhile, the WAIN element will consist of an active trailer that will provide a base of operations for the rover and be limited in terms of mobility and navigation. This will include a local wireless network to facilitate communications from the lunar surface to Earth (or orbit) provide power for the rover and itself, and assist in scientific operations with an on-board laboratory.
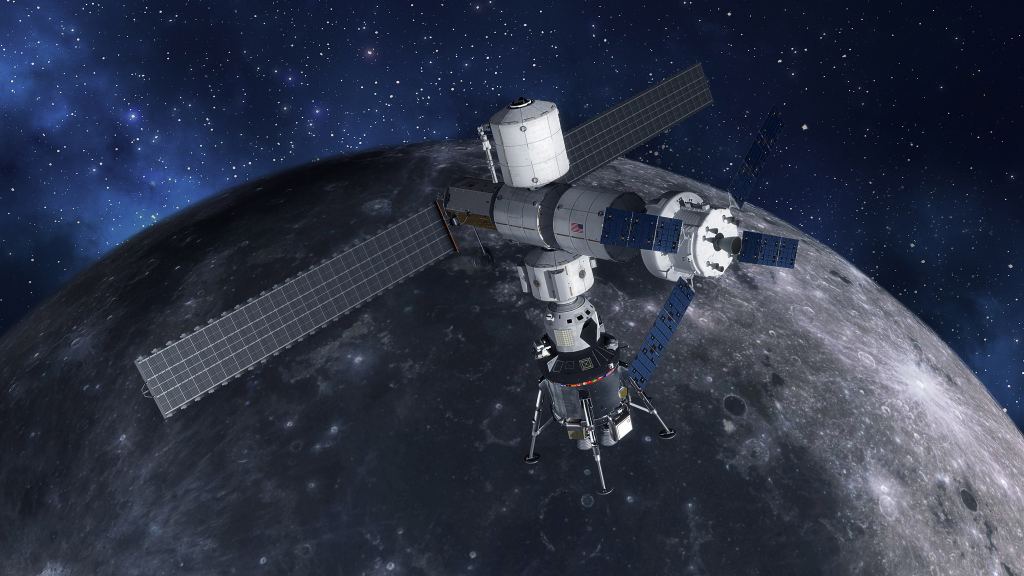
While these robots could be controlled all the way from Earth, the mission architecture was designed with the Lunar Gateway in mind. This habitat - which is being developed by NASA, the ESA, and a consortium of international partners - will be the first human outpost beyond Earth's orbit and serve as a basecamp for operations on the lunar surface.
These include NASA's return to the Moon (Project Artemis) and the ESA's proposed Human-Enhanced Robotic Architecture and Capability for Lunar Exploration and Science (HERACLES) lander and rover. And of course, there are the ESA's long term plans, in conjunction with other space agencies and international partners, to create the long-awaited International Moon Village.
In all cases, success will come down to cooperation; not just between agencies and between public and private entities, but between astronauts and robotic explorers as well. When TRAINER is complete, it will join a number of robotic missions in the South Pole-Aitken Basin that will be exploring for resources that can be used to support human operations - aka. In-Situ Resource Utilization (ISRU).
The ESA is also currently engaged in the development of a new type of command infrastructure and a force-feedback control system that will allow astronauts to "feel" what a rover feels. As part of the Analog-1 experiments, ESA astronaut Luca Parmitano successfully demonstrated the system's ability to control a rover on Earth from the ISS.
The development of TRAILER will be led by COMEX with support provided by the German Research Center for Artificial Intelligence Robotics Innovation Center (DFKI RIC) and the Vienna-based robotics company LIQUIFER Systems Group.
Further Reading: ESA, COMEX, Liquifer
