
The ESA is helping a group of students from Zurich test and develop their hopping exploration robot. Called SpaceBok, the robot is designed to operate on low-gravity bodies like the Moon or asteroids. It's based on the concept of 'dynamic walking', something that animals on Earth use.
Rovers like Spirit, Opportunity, and Curiosity have done great work exploring Mars. But those wheeled vehicles have their limitations: there are some places they just can't get to. As the tiny hopping robot MASCOT showed us on the surface of asteroid Ryugu, hopping robots have something to offer.
A group of students from institutions in Zurich are developing one of the most advance robotic explorers ever. SpaceBok is a four-legged robot being tested at the ESA's ESTEC technical center in the Netherlands. The whole idea is inspired by the astronauts who went to the Moon.
When American astronauts arrived on the Moon, they quickly figured out that hopping was a natural way to move around. The low gravity made it an efficient mode of propulsion, at least for low-mass bodies.
“For the lower gravity environments of the Moon, Mars or asteroids, jumping off the ground like this turns out to be a very efficient way to get around.” Hendrik Kolvenbach from ETH Zurich’s Robotic Systems Lab
The team of students from Zurich, led by PhD student Hendrik Kolvenbach from ETH Zurich's Robotic Systems Lab, has been working on the RobotBok for a while. Their design is based on animals like deer and antelope (Sprinbok) and how they move quickly in some circumstances.
"Instead of static walking, where at least three legs stay on the ground at all times, dynamic walking allows for gaits with full flight phases during which all legs stay off the ground," Kolvenbach said in a press release.
In the past, building these types of robots was not possible. But advances in technology are making their development feasible. "Animals make use of dynamic gaits due to their efficiency, but until recently, the computational power and algorithms required for control made it challenging to realize them on robots," said Kolvenbach.
When astronauts landed on the Moon, jumping was an instinctive response to the low gravity there. But it was easier for them; we humans have natural balance. For robots, that capability needs to be meticulously designed and built-in, much like a spacecraft.
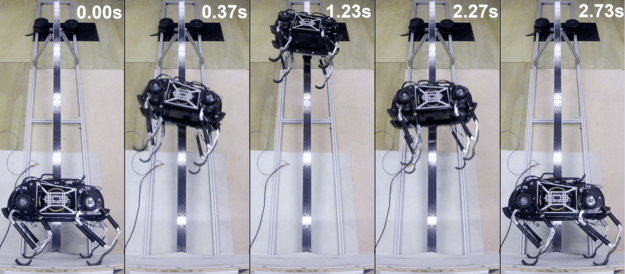
"Astronauts moving in the one-sixth gravity of the Moon adopted jumping instinctively. SpaceBok could potentially go up to 2 m high in lunar gravity, although such a height poses new challenges. Once it comes off the ground the legged robot needs to stabilise itself to come down again safely – it's basically behaving like a mini-spacecraft at this point," says team member Alexander Dietsche.
"So what we've done is harness one of the methods a conventional satellite uses to control its orientation, called a reaction wheel. It can be accelerated and decelerated to trigger an equal and opposite reaction in SpaceBok itself," explains team member Philip Arm.
Even though humans and animals can jump with natural ease, a jumping robot like SpaceBok does have some advantages. It can store energy.
"Additionally, SpaceBok's legs incorporate springs to store energy during landing and release it at take-off, significantly reducing the energy needed to achieve those jumps," adds another team member, Benjamin Sun.
Even though the team thinks that SpaceBok could jump to heights of 2 meters (6.5 feet) on the Moon, they're not there yet. So far they've attained heights of 1.3 (4.2 ft) meters in simulated lunar gravity.
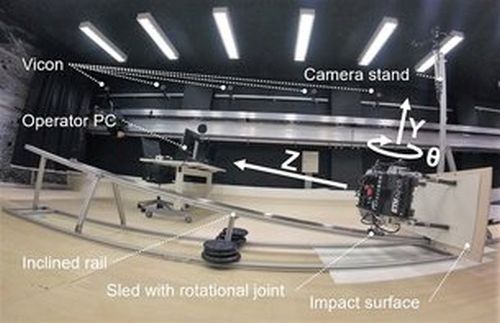
The testing facility in the Netherlands allows the team to simulate different gravity environments. On asteroids, the robot can jump even higher than 2 meters, and for longer periods of time, but that requires even better controls to perform safe landings.
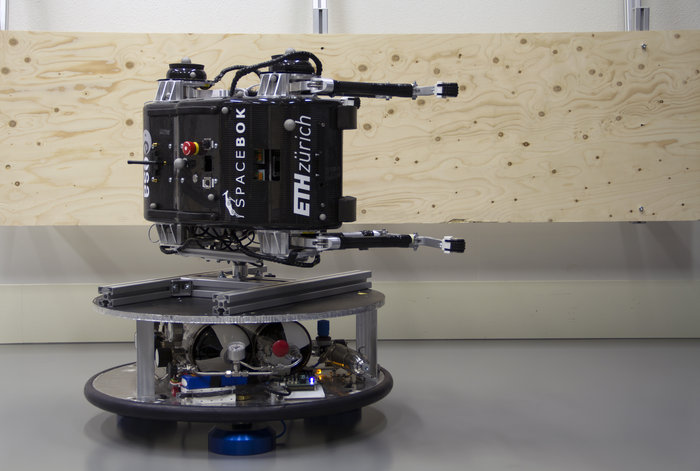
Another test made use of an extremely flat surface called the Orbital Robotics Bench for Integrated Technology (ORBIT.) ORBIT can test SpaceBok in two dimensions. In this test, the robot was placed on its side and attached to a free-floating base. Then it bounced side to side on ORBIT, to simulate the extremely low gravity of asteroids.
Testing is going well for SpaceBok. But this is all flat surface, tethered testing in laboratory conditions. The team has done some testing on uneven surfaces at the ESA's Mars Yard, but it needs more testing with obstacles that have to be jumped over. Some of that will eventually be done outdoors.
Sources:
- Press Release: Jumping Space Robot Flies Like A Spacecraft
- ESA: Automation and Robotics
- Universe Today: A German-French Hopping Robot Just Landed on the Surface of Asteroid Ryugu