There are many hazards out there, eager to disrupt and dismantle the mighty machines we send out into space. How long can they survive to perform their important missions?
Every few months, an eager new spacecraft arrives on the launch pad, ready for its date with destiny. If we don’t blow it all to bits with a launch vehicle failure, it’ll be gently placed into orbit with surgical precision. Then it’ll carry out a noble mission of exploring the Solar System, analyzing the Earth, or ensuring we have an infinite number of radio stations in our cars, allowing us to never be satisfied with any of them.
Space is hostile. Not just to fragile hu-mans, but also to our anthropomorphized Number Five is alive robotic spacecraft which we uncaringly send to do our bidding. There are many hazards out there, eager to disrupt and dismantle our stalwart electronic companions. Oblivion feeds voraciously on our ever trusting space scouts and their tiny delicate robotic hearts, so many well before their time.
How long have they got? How long will our spacecraft survive as we cast them on their suicide missions to “go look at stuff on behalf of the mighty human empire”? When spacecraft are hurled into the void, all mission planners know they’re living on borrowed time.
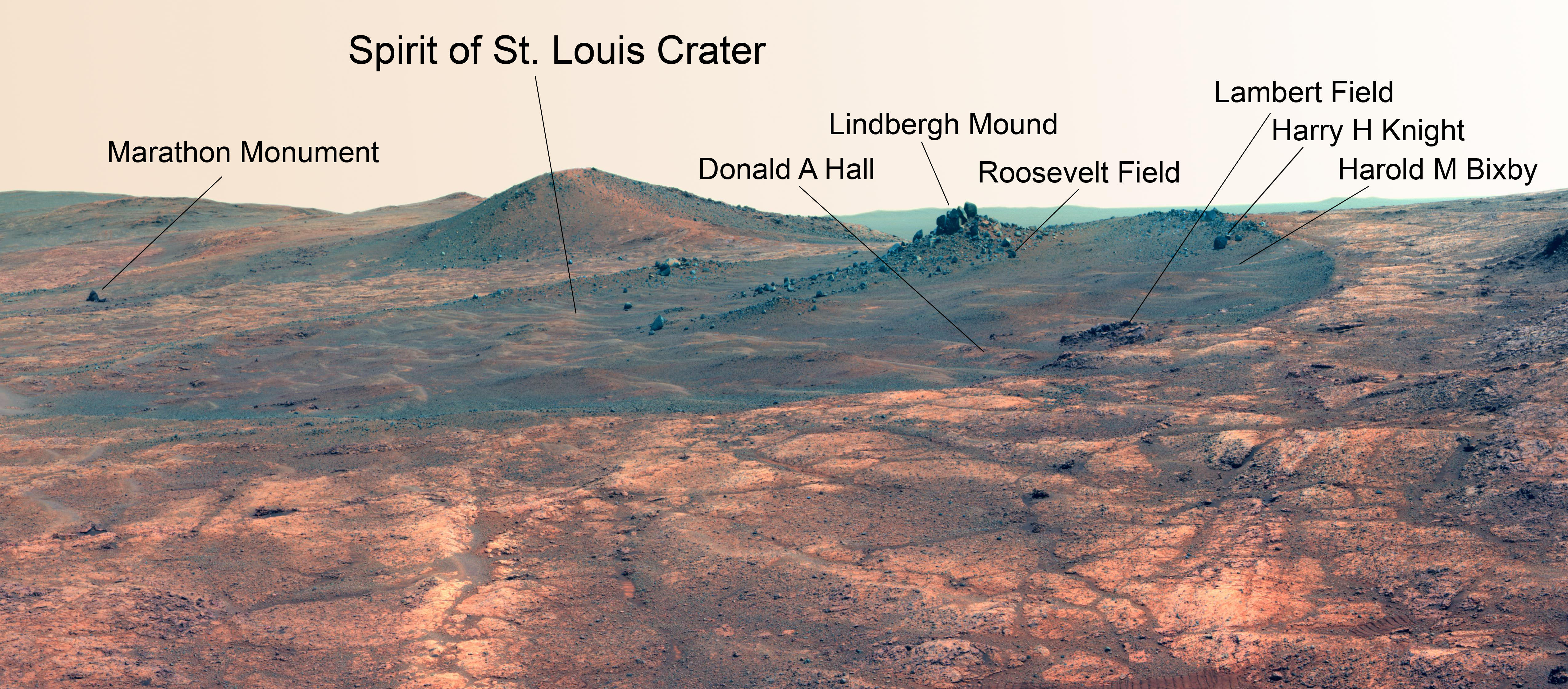
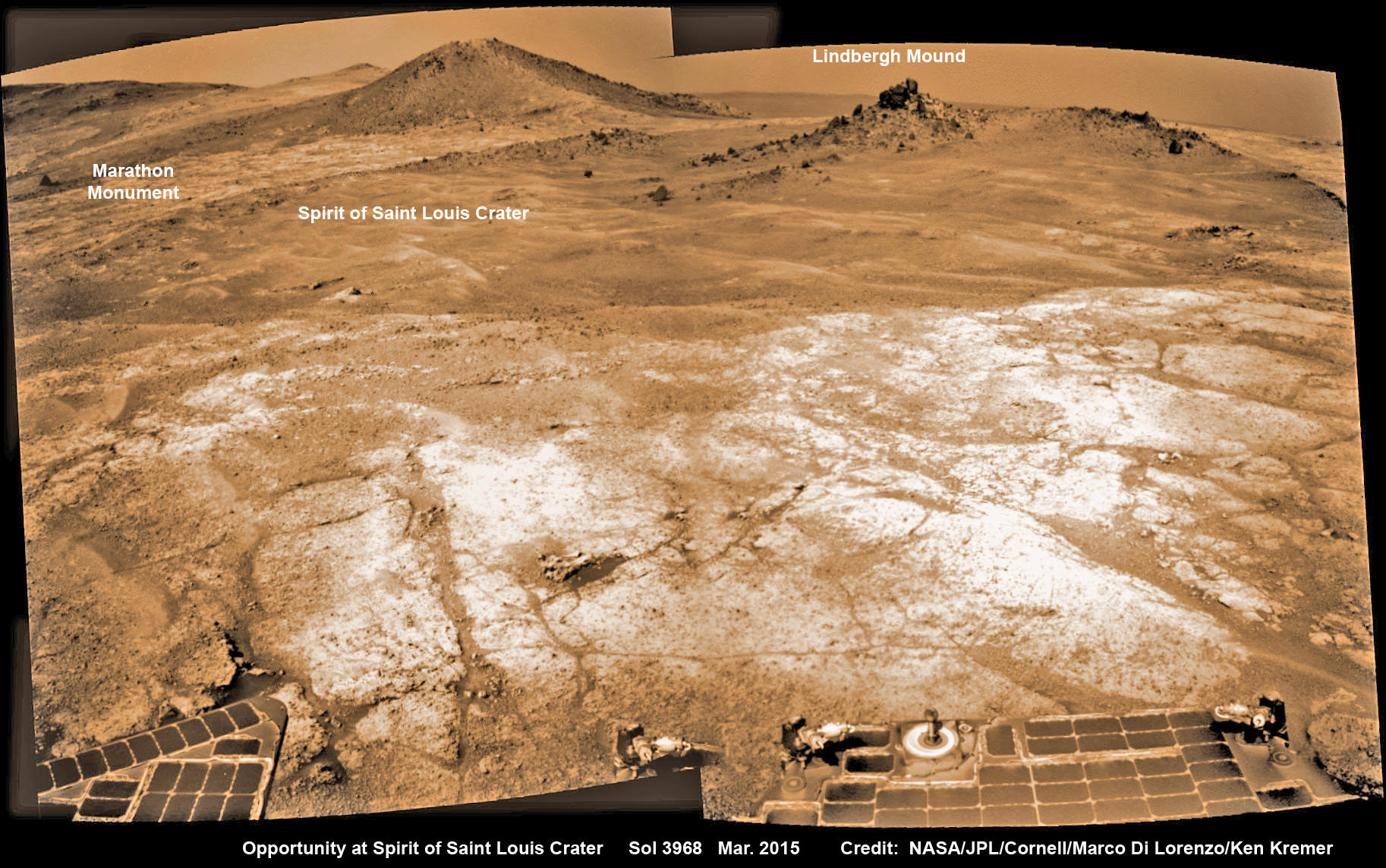
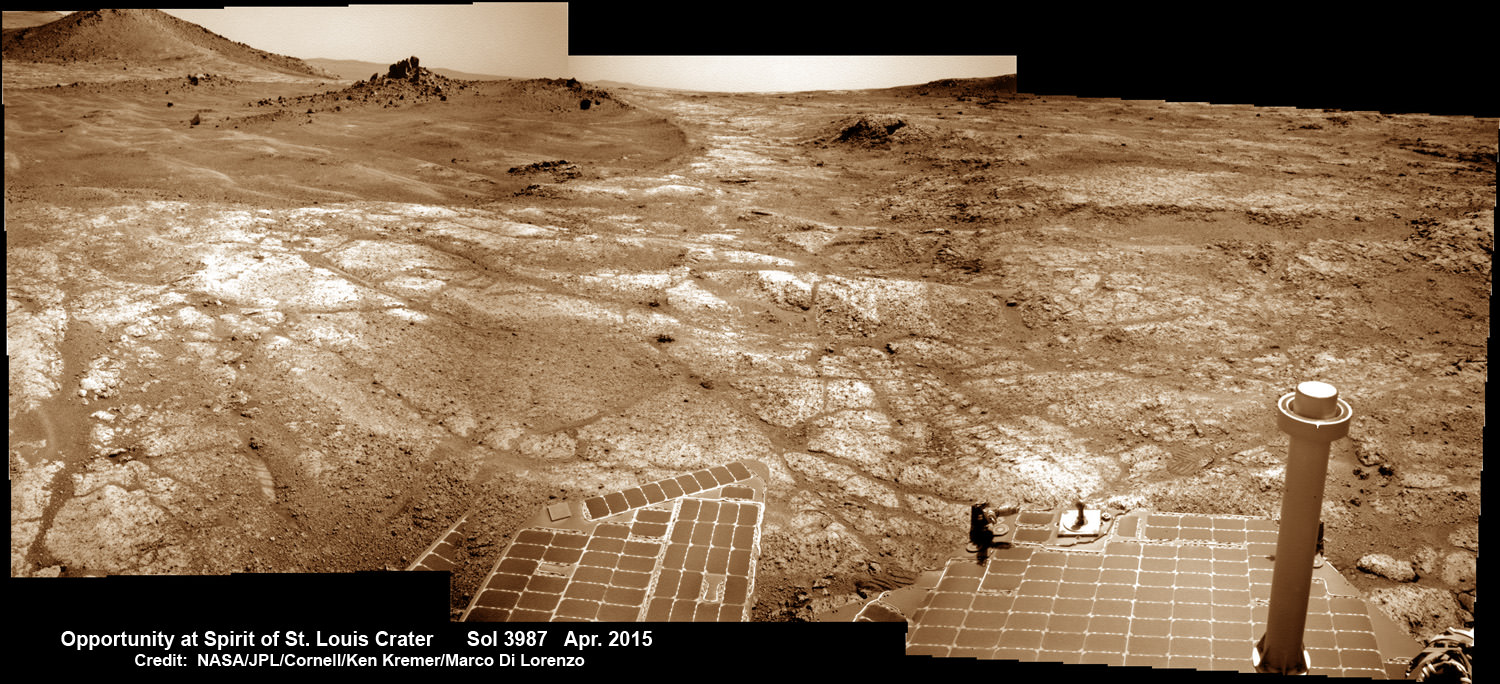
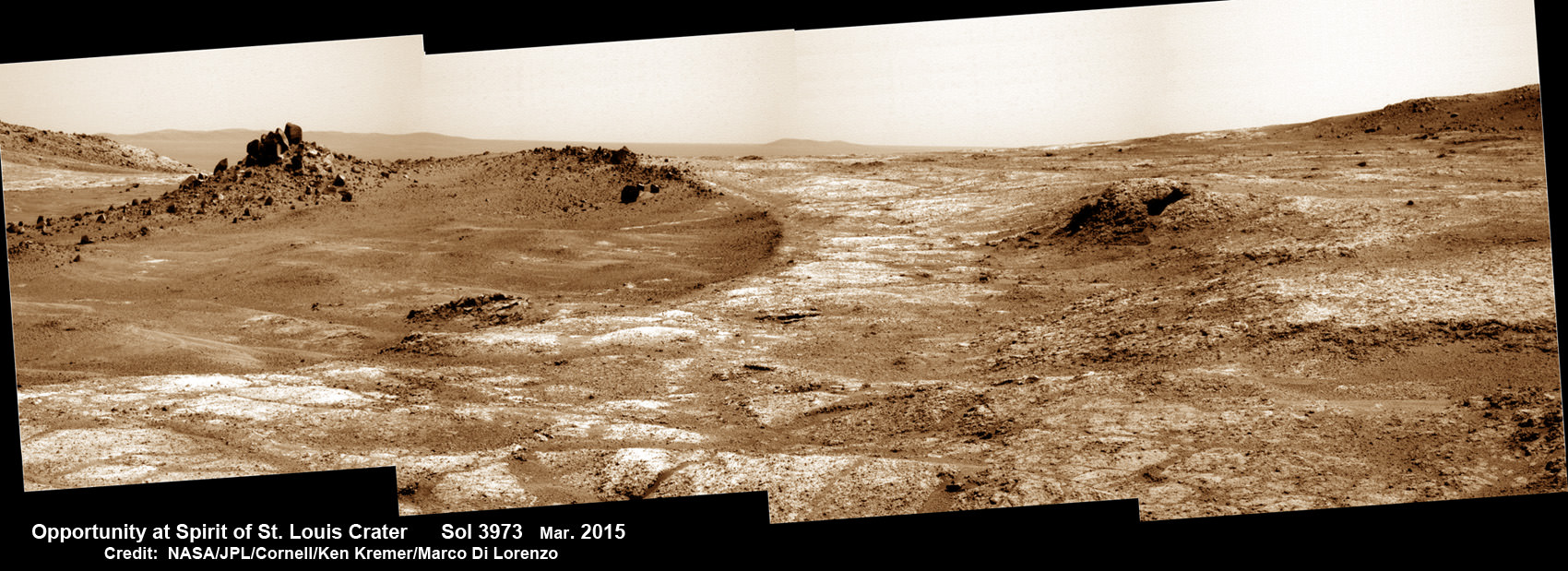
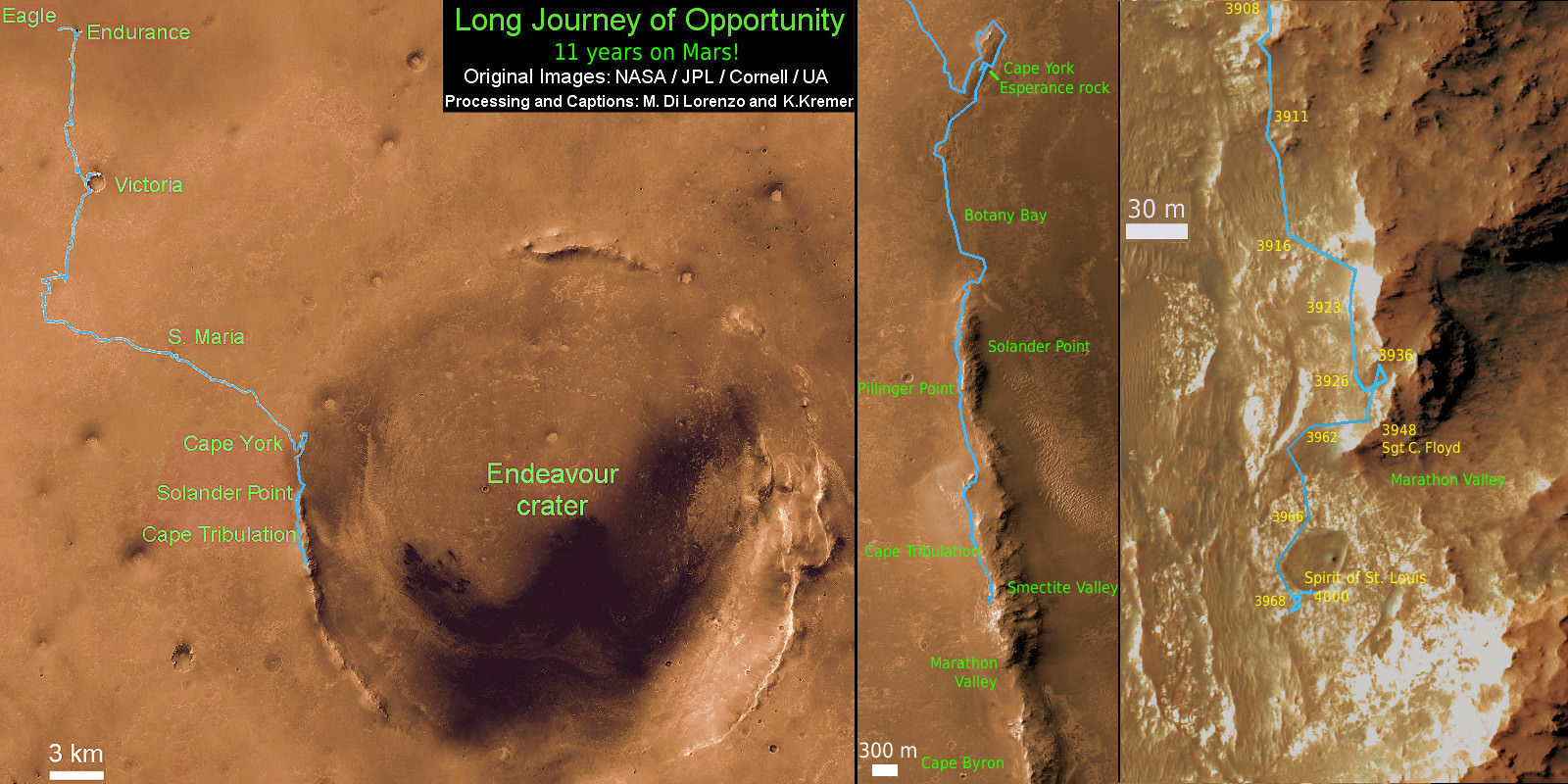
The intrepid Mars Exploration Rovers, Spirit and Opportunity, were only expected to operate for 3 months. NASA’s Spitzer Space Telescope carried a tank of expendable helium coolant to let it see the dimmest objects in the infrared spectrum.
Sometimes the spacecraft wear down for unexpected reasons, like electronic glitches, or parts wearing out. Hubble was equipped with rotating gyroscopes that eventually wore out over time, making it more difficult to steer at its targets, and only an intervention by rescue and repair allowed the mission to keep going.
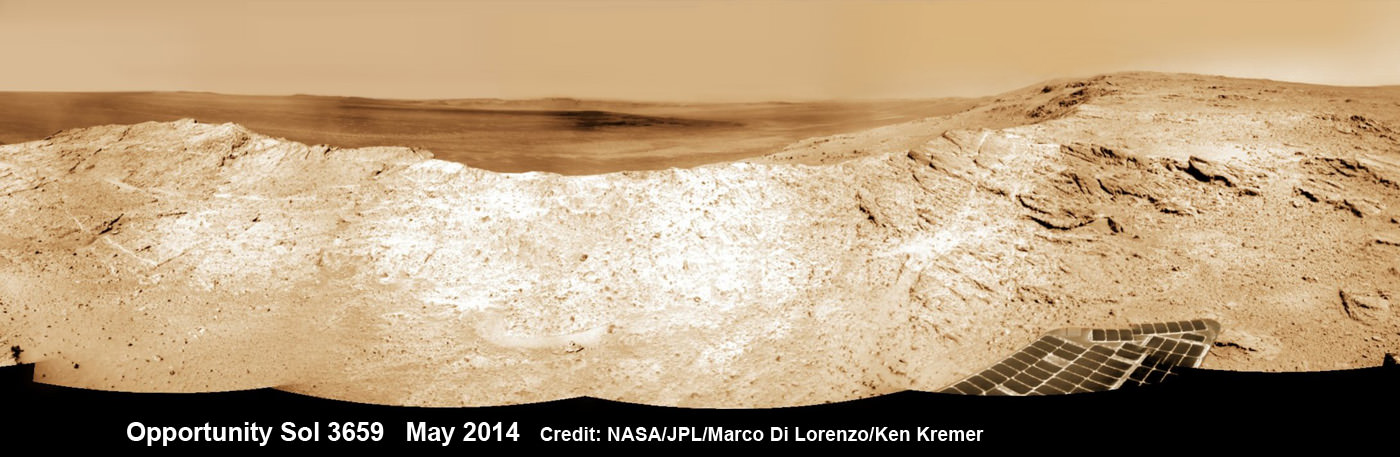
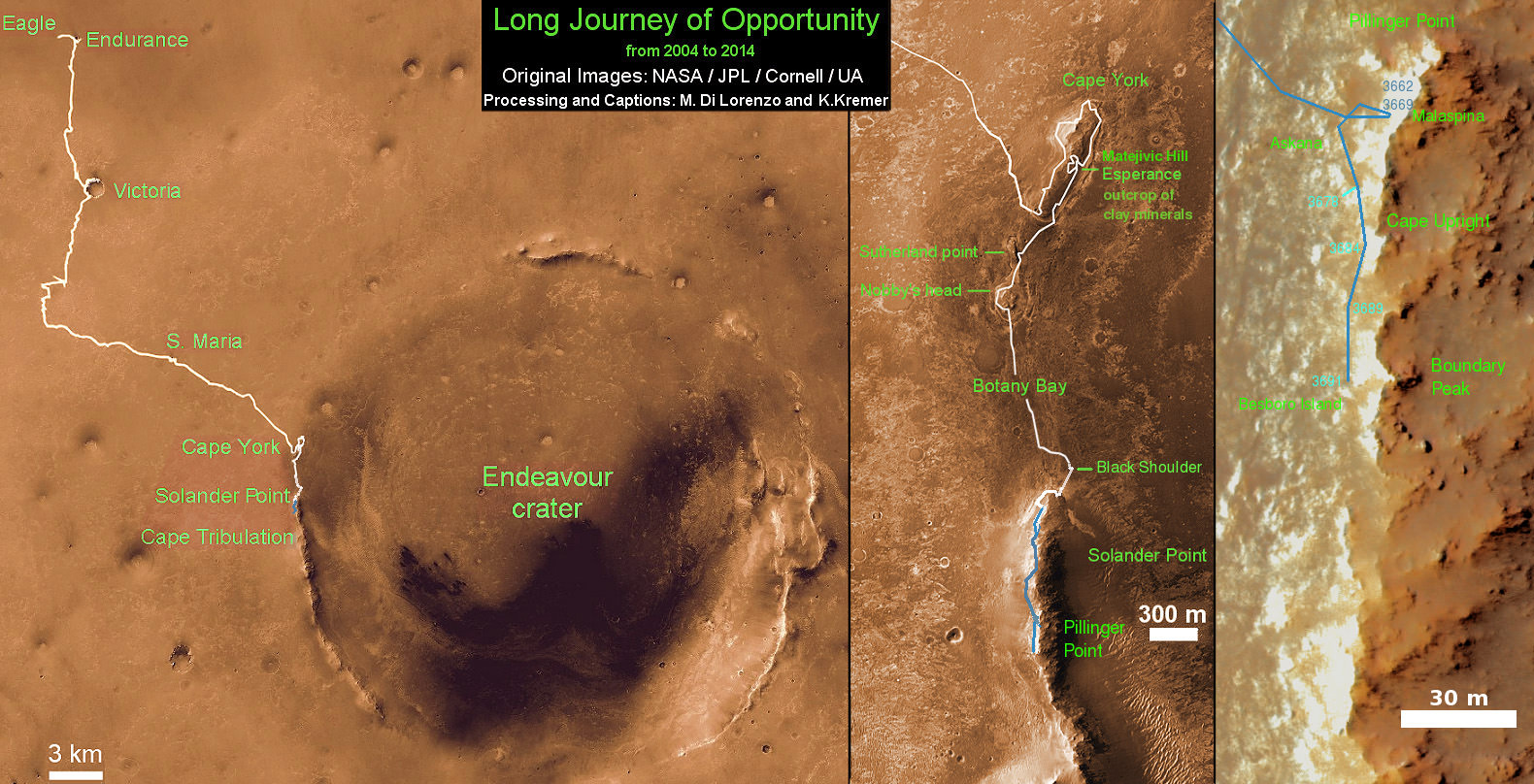
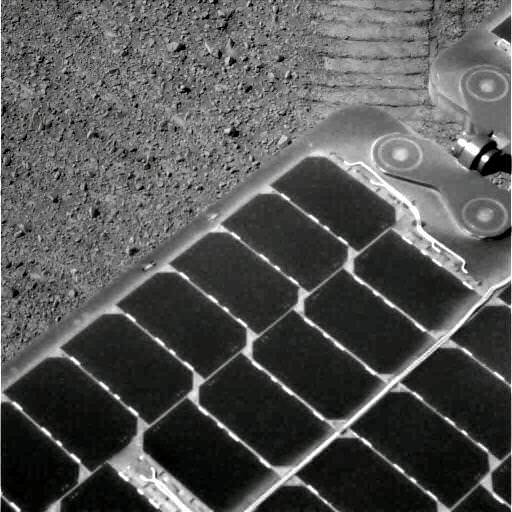
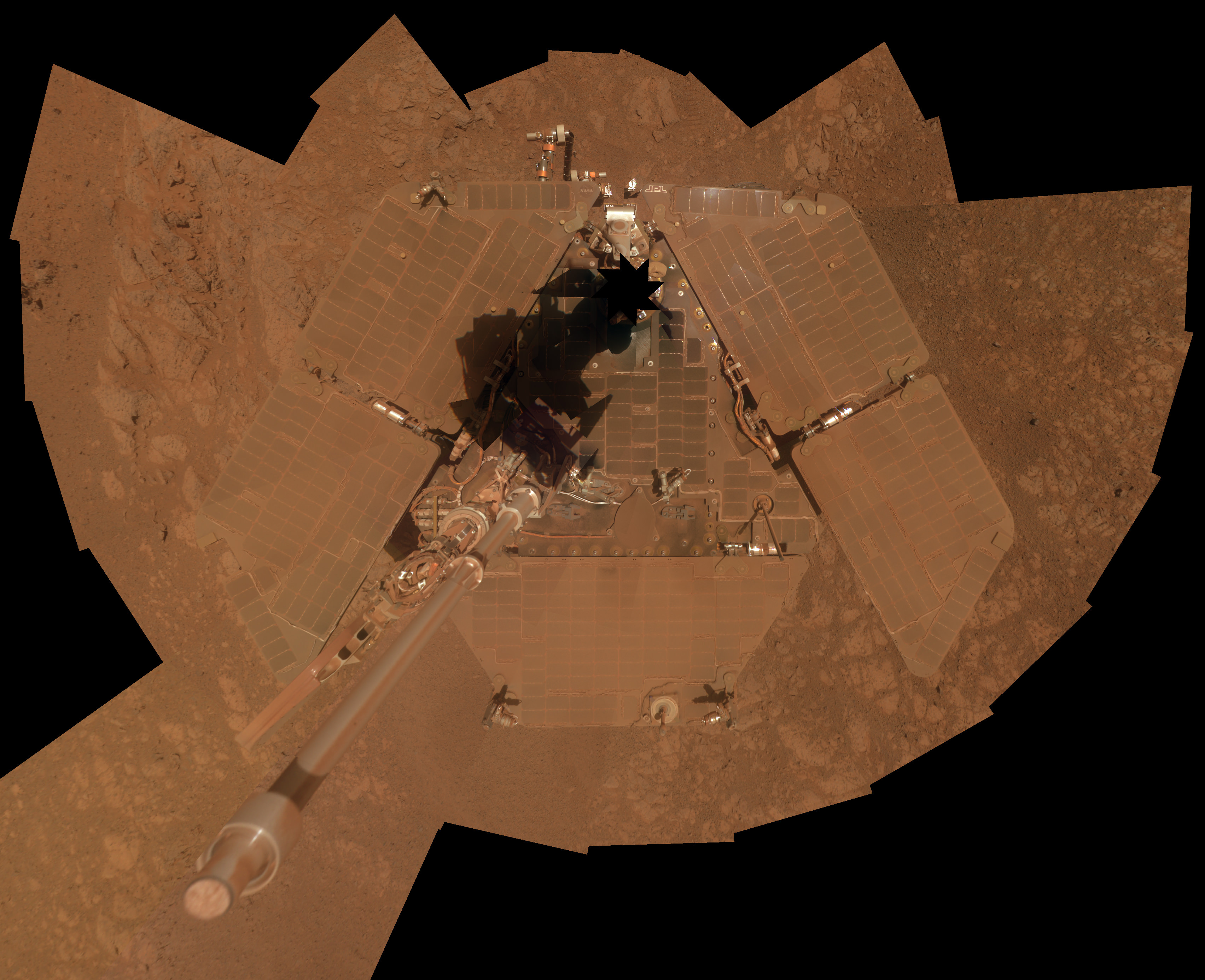
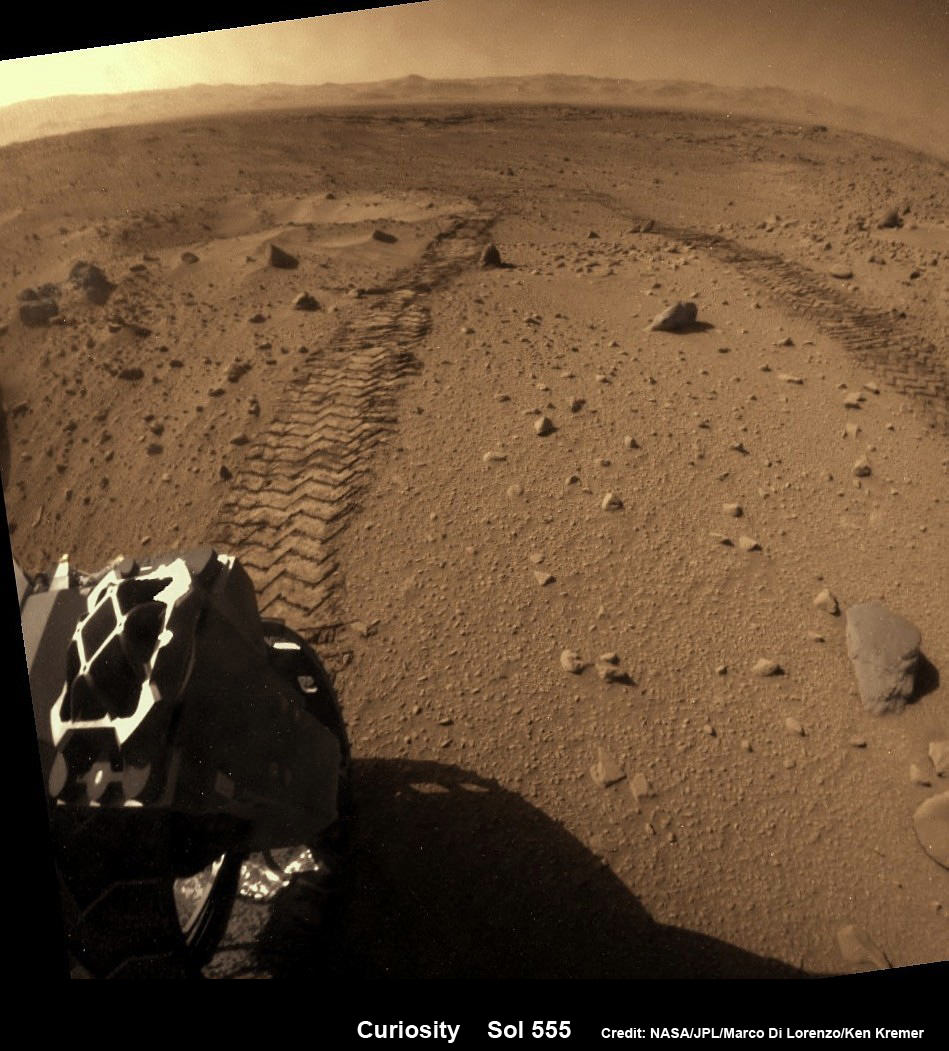
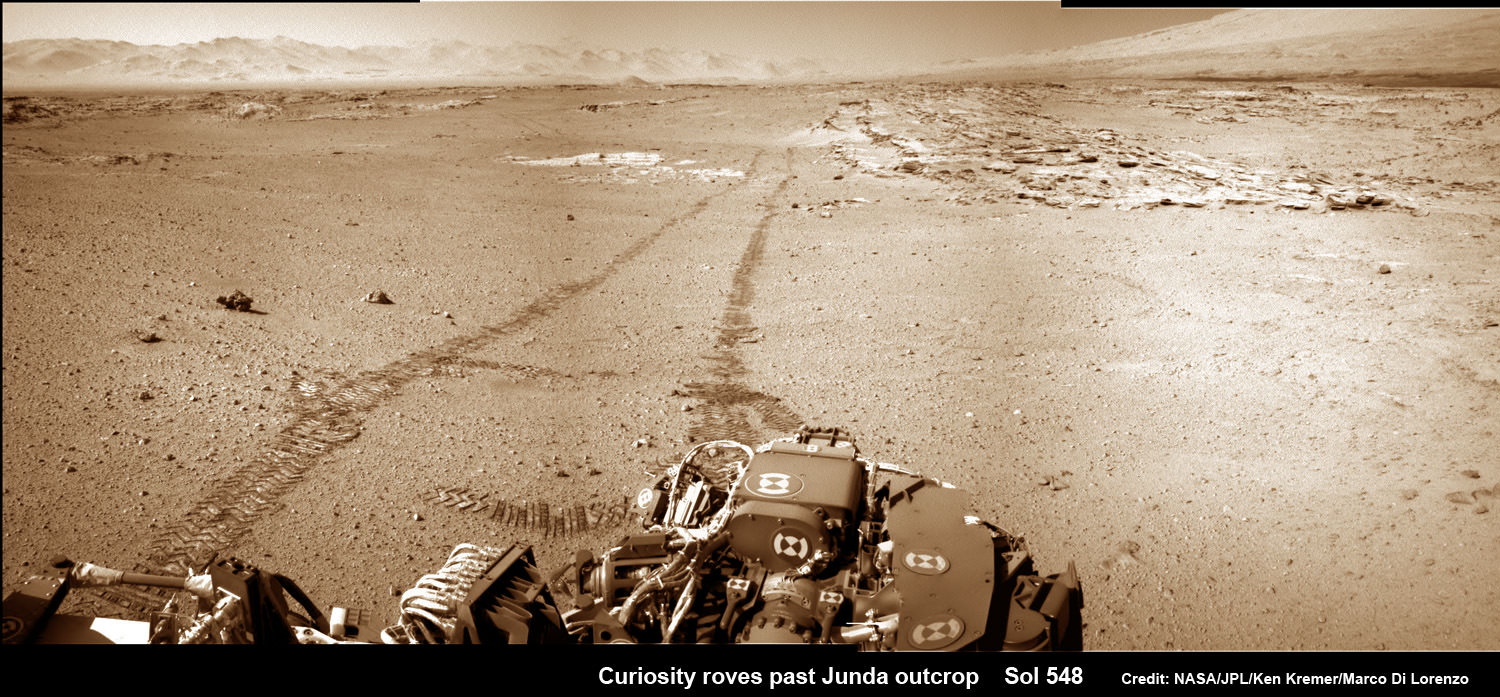
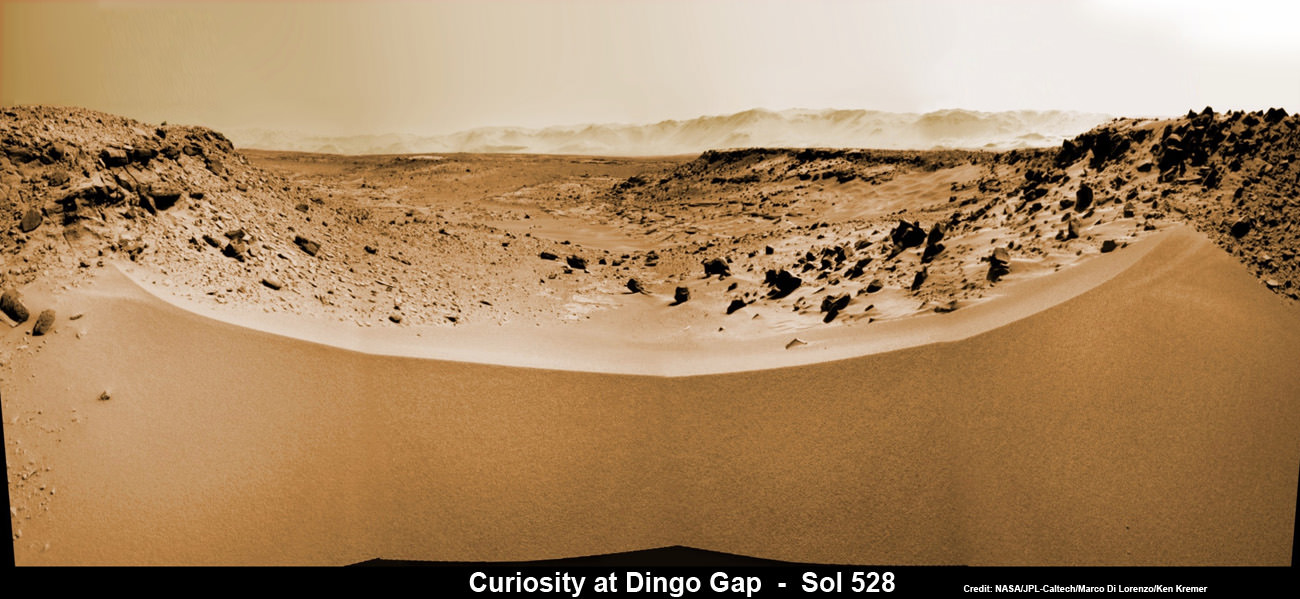
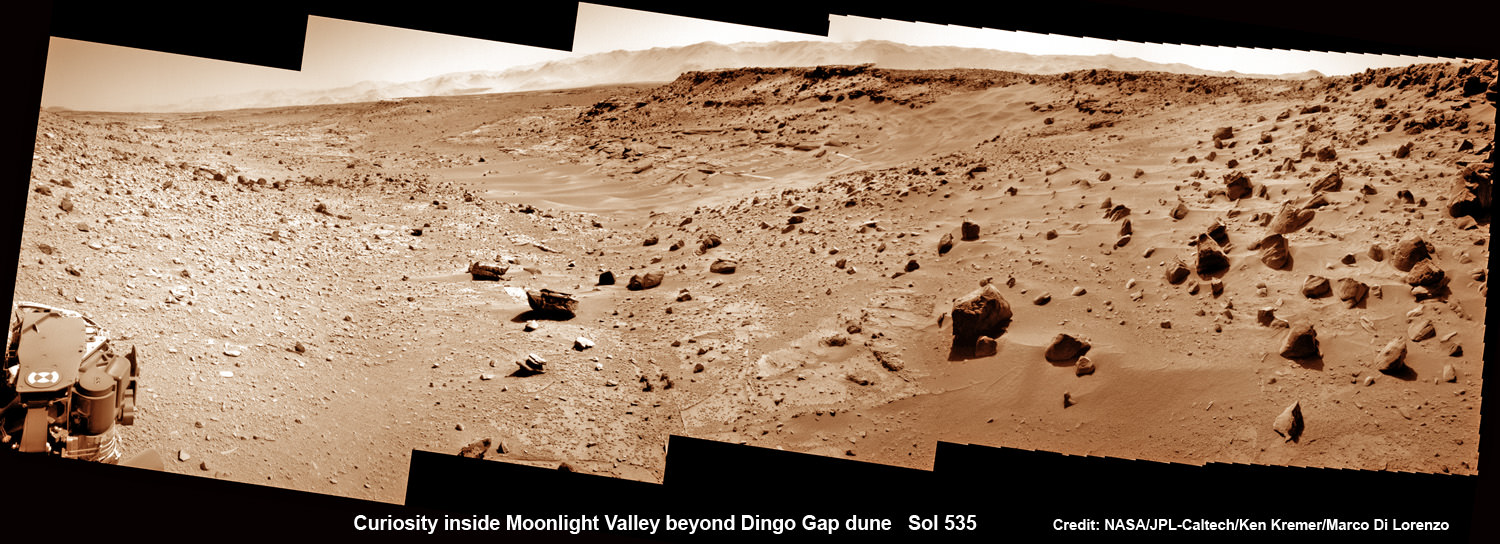
In general, a spacecraft is expected to last a few months to a few years. Spirit and Opportunity only had a planned mission of 3 months. It took Spirit more than 6 dauntless years to finally succumb to the hostile Martian environment. Opportunity is still kicking more than a decade later, thanks to some very careful driving and gusts of Martian wind clearing off its solar panels which didn’t surprise anybody.

ESA’s Rosetta spacecraft needed to survive for 10 years in a dormant state before its encounter with Comet 67/P. It’s expected to last until the end of 2015. Then its orbit will carry it too far from the Sun to operate its solar panels, then it’ll go to sleep one last time.
As a testament to luck and remarkable feats of engineering, some survive much longer than anyone ever expected. NASA’s Voyager Spacecraft, launched in 1977, are still going and communicating with Earth. It’s believed they’ll survive until 2025, when their radioisotope thermoelectric generators stop producing power.
At which point they’ll return to the Earth at the heart of a massive alien spacecraft and scare the bejeebus out of us.
… And I know what you’re thinking. Once our spacecraft stop functioning, they’ll still exist. Perhaps getting close enough to another source of solar energy to start transmitting again.
So, how long will our spacecraft hold together in something roughly robot-probe shaped? Any spacecraft orbiting a planet or Moon won’t last long geologically before they’re given a rocky kiss of death with help from a big group hug from gravity.
This might take a decade, a hundred years or a million. Eventually, that spacecraft is racing towards a well distributed grave on its new home.
A spacecraft that’s orbiting the Sun should last much longer. However, a gravitational threesome with a planet or large asteroid could drag it into a solar death spiral or hurl it into a planet. There are asteroids whipping around from the formation of the Solar System, and they haven’t crashed into anything… yet.
A lucky spacecraft might last hundreds of millions, or even billions of years. Our little robot friends that leave the gravitational pull of the Solar System have a chance of making it for the long haul.
Once they’re out in interstellar space, there will be very few micrometeorites to punch little holes in them. Unless they happen to run into another star – and that’s very unlikely – they’ll travel through space until they’re worn away over billions of years, and who knows what that means for future alien archaeology students. The golden records on the Voyager spacecraft were designed to still be playable for a billion years in space.
It’s tough to keep a spacecraft operating in space. It’s a really hostile place, ready to fry their little silicon brains, scuttle them with a micrometeorite, or just erode them away over an incomprehensible length of time.
Are horrible space agency fiends tossing our trusting big eyed robot pals to their doom on one-way missions into the abyss? Don’t worry viewers, I have it on good authority this is what the robots want.
Beloved astronaut Chris Hadfield said if Voyager had stayed at home where it’s safe, it would’ve been sad forever, because it never would have discovered things. I think he’s right, Voyager is as happy as it could be exploring the parts of our Universe the rest of us aren’t able to go and see for ourselves.
What’s your favorite spacecraft survivor story? Tell us in the comments below.