NASA's Jet Propulsion Laboratory recently announced that it is developing a small drone helicopter to scout the way for future Mars rovers. Why would Mars rovers need such a robotic guide? The answer is that driving on Mars is really hard.
Here on Earth, robots exploring volcanic rims, or assisting rescuers, can be driven by remote control, with a joystick. This is because radio signals reach the robot from its control center almost instantly. Driving on the moon isn't much harder. Radio signals traveling at the speed of light take about two and half seconds to make the round trip to the moon and back. This delay isn't long enough to seriously interfere with remote control driving. In the 1970's Soviet controllers drove the Lunokhod moon rovers this way, successfully exploring more than 40 km of lunar terrain.
Driving on Mars is much harder, because it is so much further away. Depending on its position with respect to Earth, signals can take between 8 and 42 minutes for the round trip. Pre-programmed instructions must be sent to the rover, which it then executes on its own. Each Martian drive takes hours of careful planning. Stereo images taken by the rover's navigation cameras are carefully scrutinized by engineers. Images from spacecraft orbiting Mars sometimes provide additional information.
A rover can be programmed either to simply execute a list of driving commands sent from Earth, or it can use images taken by its navigation cameras and processed by its on-board computers to measure speed and detect obstacles or hazards by itself. It can even plot its own safe path to a specified goal. Drives based on instructions from the ground are the fastest.
The Mars Exploration Rovers Spirit and Opportunity could drive up to 124 meters in an hour this way. This corresponds to about the length of an American football field. But this mode was also the least safe.
When the rover actively guides itself with its cameras, progress is safer, but much slower because of all the image processing needed. It may progress by as little as 10 meters an hour, which is about the distance from the goal line to the 10 yard line on an American football field. This method must be used whenever the rover doesn't have a clear view of the route ahead, which is often the case due to rough and hilly terrain.
As of early 2015, the farthest Curiosity has driven in a single day is 144 meters. Opportunity's longest daily drive was 224 meters, a distance the length of two American football fields.
If ground controllers could get a better view of the path ahead, they could devise instructions allowing a future rover to safely drive much further in a day.
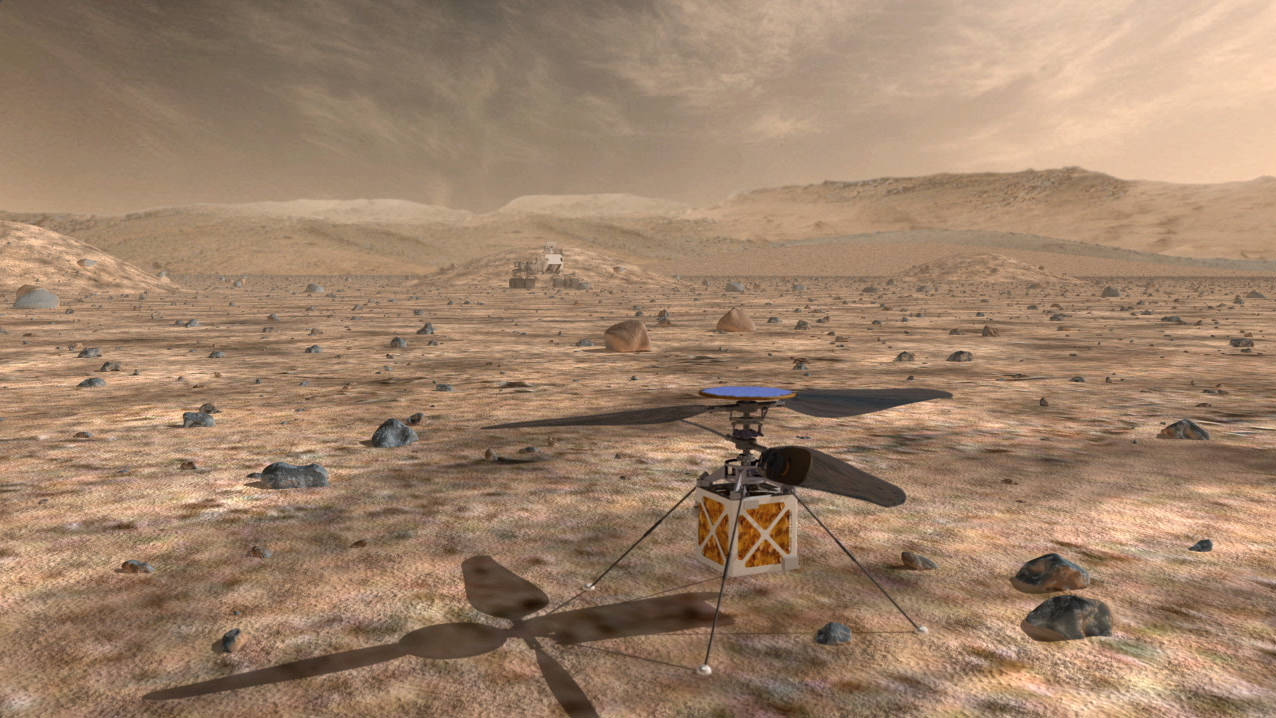
That's where the idea of a drone helicopter comes in. The helicopter could fly out ahead of the rover every day. Images made from its aerial vantage point would be invaluable to ground controllers for identifying points of scientific interest, and planning driving routes to get there.
Flying a helicopter on Mars poses special challenges. One advantage is that Martian gravity is only 38% as strong as that of Earth, so that the helicopter wouldn't need to generate as much lift as one of the same mass on Earth. A helicopter's propeller blades generate lift by pushing air downward. This is harder to do on Mars than on Earth, because the Martian atmosphere is on hundred times thinner. To displace enough air, the propeller blades would need to spin very quickly, or to be very large.
The copter must be capable of flying on its own, using prior instructions, maintaining stable flight along a pre-specified route. It must land and take off repeatedly in rocky Martian terrain. Finally it must be capable of surviving the harsh conditions of Mars, where the temperature plummets to 100 degrees Fahrenheit or lower every night.
The JPL engineers designed a copter with a mass of 1 kilogram; a tiny fraction of the 900 kg mass of the Curiosity rover. Its propeller blades span 1.1 meters from blade tip to blade tip, and are capable of spinning at 3400 rotations per minute. The body is about the size of a tissue box.
The copter is solar powered, with a disk of solar cells gathering enough power every day to power a flight of two to three minutes and to heat the vehicle at night. It can fly about half a kilometer in that time, gathering images for transmission to ground control as it goes. Engineers expect that the reconnaissance that the drone copter gathers will be invaluable in planning a rover's drives, tripling the distance that can be traveled in a day.
References and further reading: Thanks to Mark Maimone of NASA Jet Propulsion Laboratory for information about the daily driving distances of Curiosity and Opportunity.
J.J. Biesiadecki, P. C. Leger, and M.W. Maimone (2007),
'tradeoffs between directed and autonomous driving on the Mars exploration rovers',
The International Journal of Robotics Research, 26(1), 91-104
E. Howell,
Opportunity Mars rover treks past 41 kilometers towards 'Marathon Valley'
, Universe Today, Dec. 2014.
T. Reyes,
An incredible journey, Mars Curiosity rover reaches base of Mount Sharp
. Universe Today, Sept. 2014.
Helicopter could be 'scout' for Mars rovers
. NASA Jet Propulsion Laboratory Press release. January 22, 2015.
Crazy Engineering: The Mars helicopter
. NASA Jet Propulsion Laboratory video.
Curiosity- Mars Science Laboratory
, NASA.
Mars- Future rover plans
. NASA