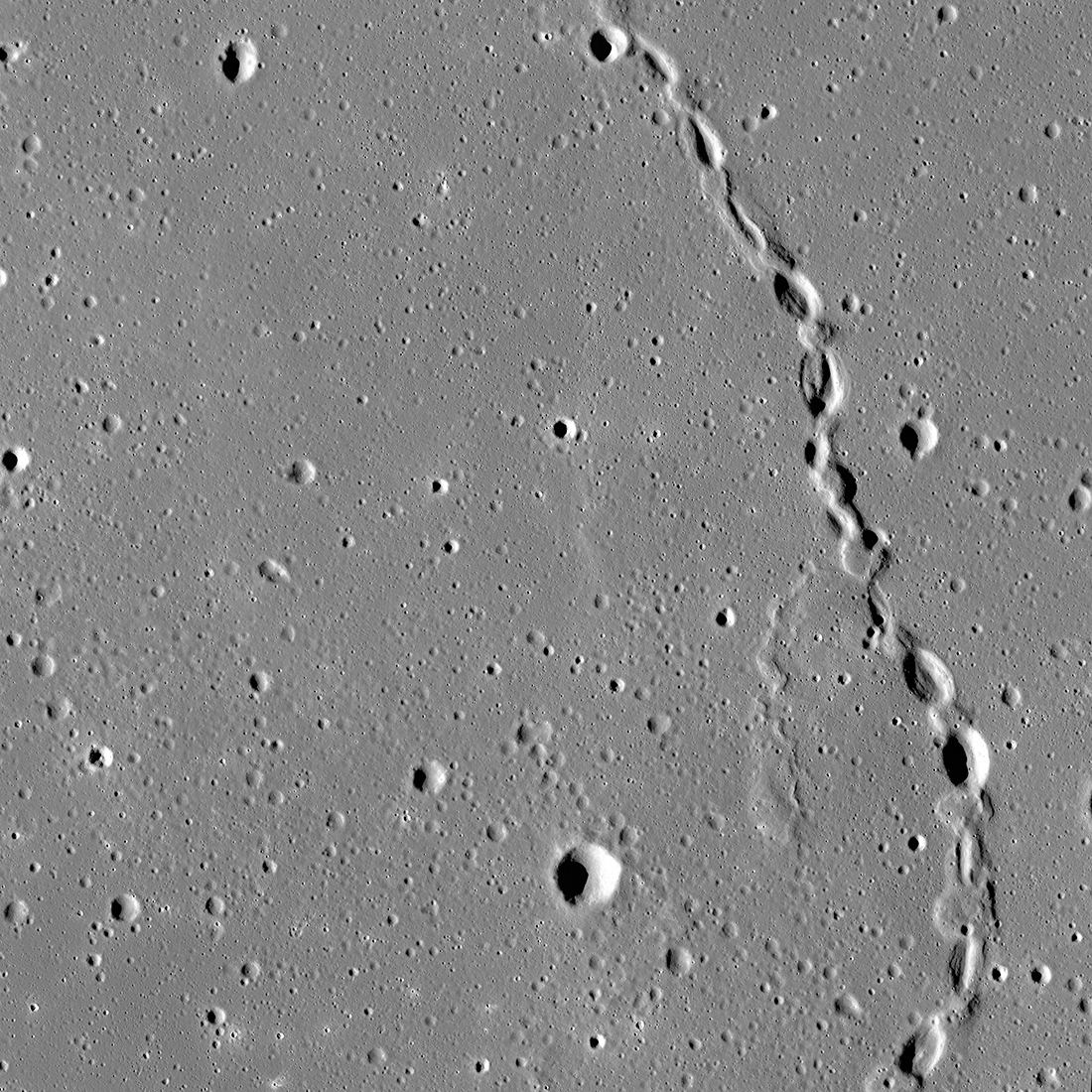
The spectacular sinuous landform shown above is thought to be a collapsed lava tube located near Gruithuisen K crater. Credit: NASA/GSFC/ASU
The Moon was once a geologically active place characterized by volcanoes, lava flows, and a magnetic field generated by action in its interior. The Moon’s airless environment has perfectly preserved evidence of this past and can be seen today as dark deposits, volcanic domes, and cones. But the most recognizable features are known as “sinuous rilles,” which are believed to be ancient lava tubes that have since collapsed. The Lunar Reconnaissance Orbiter Camera (LROC) recently captured images of a rille that extended 48 km long (30 mi) across the northern hemisphere.
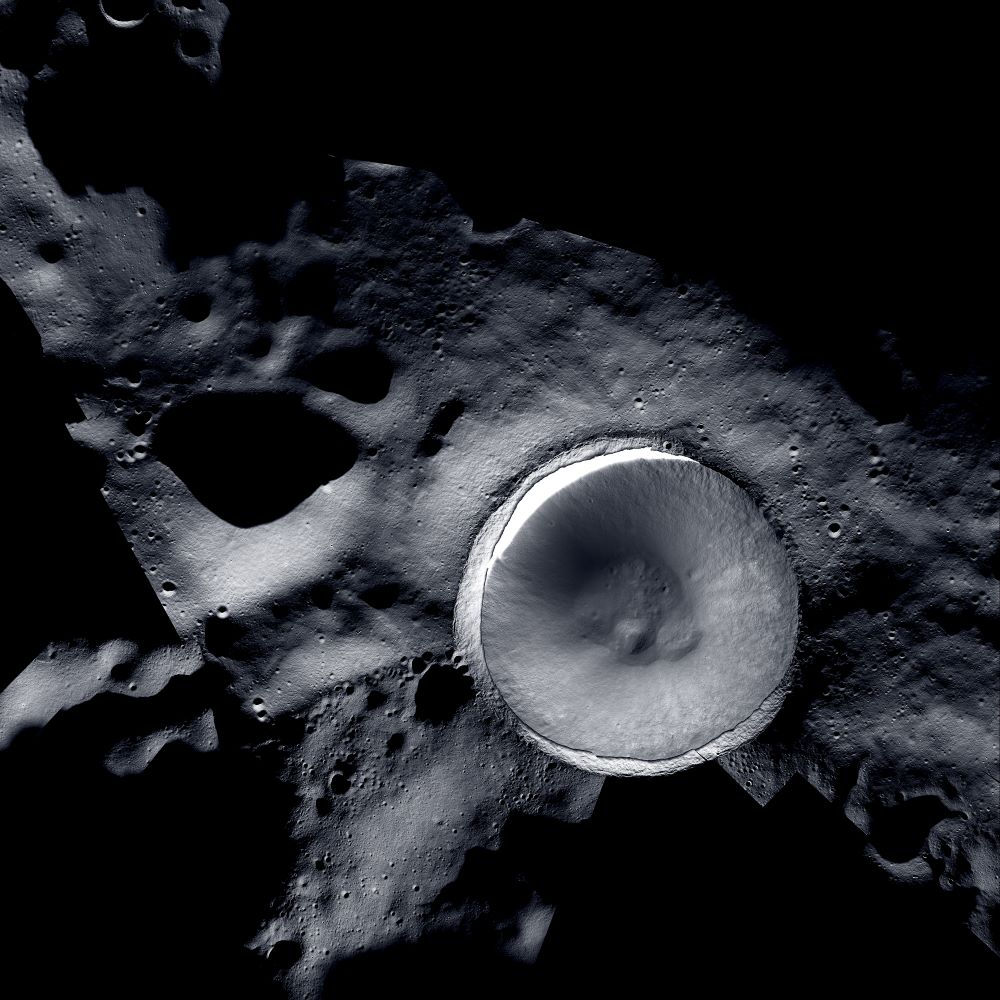
This new mosaic of Shackleton Crater on the Moon was obtained with a combination of images from NASA’s Lunar Reconnaissance Orbiter Camera (LROC) and ShadowCam. (Credit: Mosaic created by LROC (Lunar Reconnaissance Orbiter) and ShadowCam teams with images provided by NASA/KARI/ASU)
While the surface of the Moon has been mapped in incredible detail over the last several decades, one region has eluded orbital cameras due to the lack of sunlight, which are aptly called the permanently shadowed regions (PSRs) of the Moon. However, two cameras operating on two different lunar orbiters have recently worked in tandem to produce a stunning mosaic image of the lunar south pole’s Shackleton Crater, a portion of which resides directly on the lunar south pole and whose depths have been shrouded in complete darkness for possibly the last few billion years. As a result, scientists hypothesize that water ice could have accumulated within its dark depths that future astronauts could use for fuel and life support.
Malapert massif (informal name) is thought to be a remnant of the South Pole - Aitken basin rim, which formed more than 4 billion years ago. More recently, this magnificent peak (lower left) was selected as an Artemis 3 candidate landing region. Image is 25 kilometers wide in the center, Narrow Angle Camera M1432398306LR (NASA/GSFC/Arizona State University).
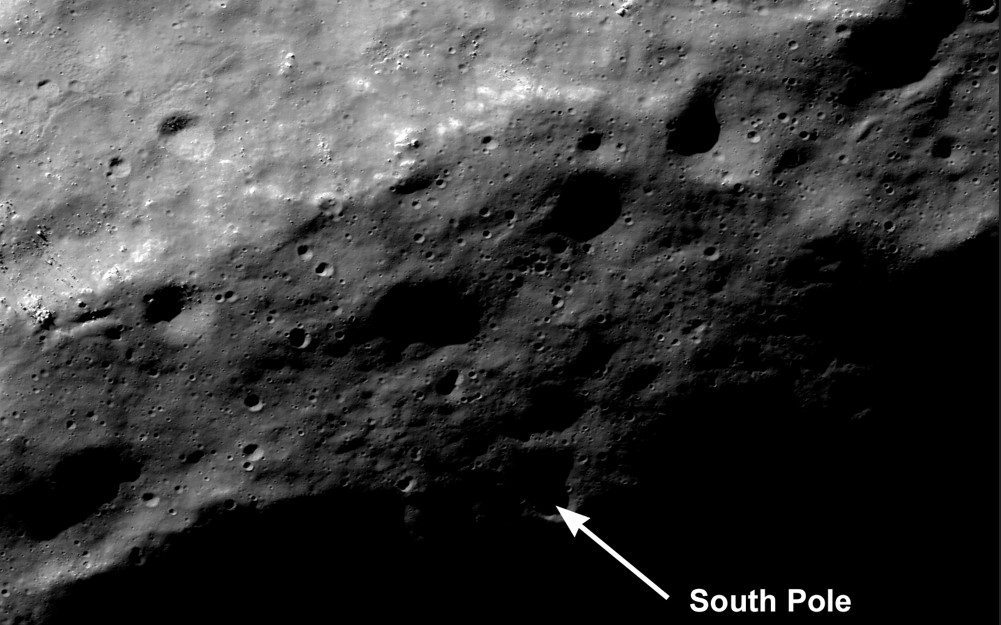
Where on the Moon will the first crewed Artemis mission Land? While NASA is still deliberating on the exact location, they’ve chosen several candidate landing sites near the lunar south pole. This new image captured by the Lunar Reconnaissance Orbiter reveals what the astronauts might see out the window as they approach their destination.
As the Moon heads into southern summer the region around the south pole is better seen by LROC. One of the many goals of the LRO mission is to improve our cartographic knowledge of the Moon. The location of the pole shown here (image 1600 meters wide) may be in error by several hundred meters, wait a year for an update! [NASA/GSFC/Arizona State University]
Since 2009, the Lunar Reconnaissance Orbiter (LRO) has been taking high-resolution pictures of the lunar surface. This data, along with the information from a laser altimeter mapping instrument has allowed scientists to create an incredibly detailed map of the Moon. NASA says they can now confidently pinpoint any feature on the Moon, including the exact location of its South Pole.
The new crater is located on a steep slope, greater than 20°, measured from an LROC NAC Digital Terrain Model. Credit: NASA/GSFC/Arizona State University
On May 20th, 2018, the China National Space Agency (CNSA) launched the Queqiao spacecraft, the vehicle that would deliver the Chang’e-4mission to the Moon. This vehicle was also responsible for transporting a lesser-known mission to the Moon, known as the Longjiang twin spacecraft. This package consisted of two satellites designed to fly in formation and validate technologies for low-frequency radio astronomy.
While Queqiao flew beyond the Moon to act as a communications relay for the Chang’e-4 lander, the Longjiang satellites were to enter orbit around the moon. On July 31st, 2019, after more than a year in operation, the Longjiang-2 satellite deorbited crashed on the lunar surface. And thanks to efforts spacecraft tracker Daniel Estévez and his colleagues, the Lunar Reconnaissance Orbiter (LRO) was able to photograph the impact site.
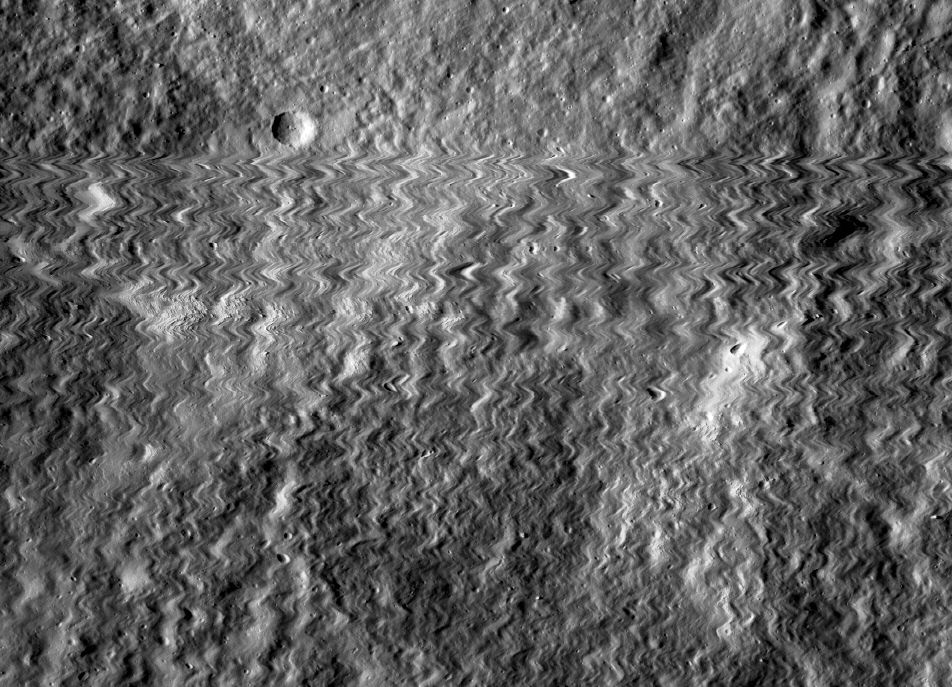
The first wild back-and-forth line records the moment (October 13, 2014 at 21:18:48.404 UTC) that the left NAC radiator was struck by a meteoroid. Credit: NASA/GSFC/Arizona State University
On October 13th, 2014, the Lunar Reconnaissance Orbiter (LRO) experienced something rare and unexpected. While monitoring the surface of the Moon, the LRO’s main instrument – the Lunar Reconnaissance Orbiter Camera (LROC) – produced an image that was rather unusual. Whereas most of the images it has produced were detailed and exact, this one was subject to all kinds of distortion.
From the way this image was disturbed, the LRO science team theorized that the camera must have experienced a sudden and violent movement. In short, they concluded that it had been struck by a tiny meteoroid, which proved to a significant find in itself. Luckily, the LRO and its camera appear to have survived the impact unharmed and will continue to survey the surface of the Moon for years to come.
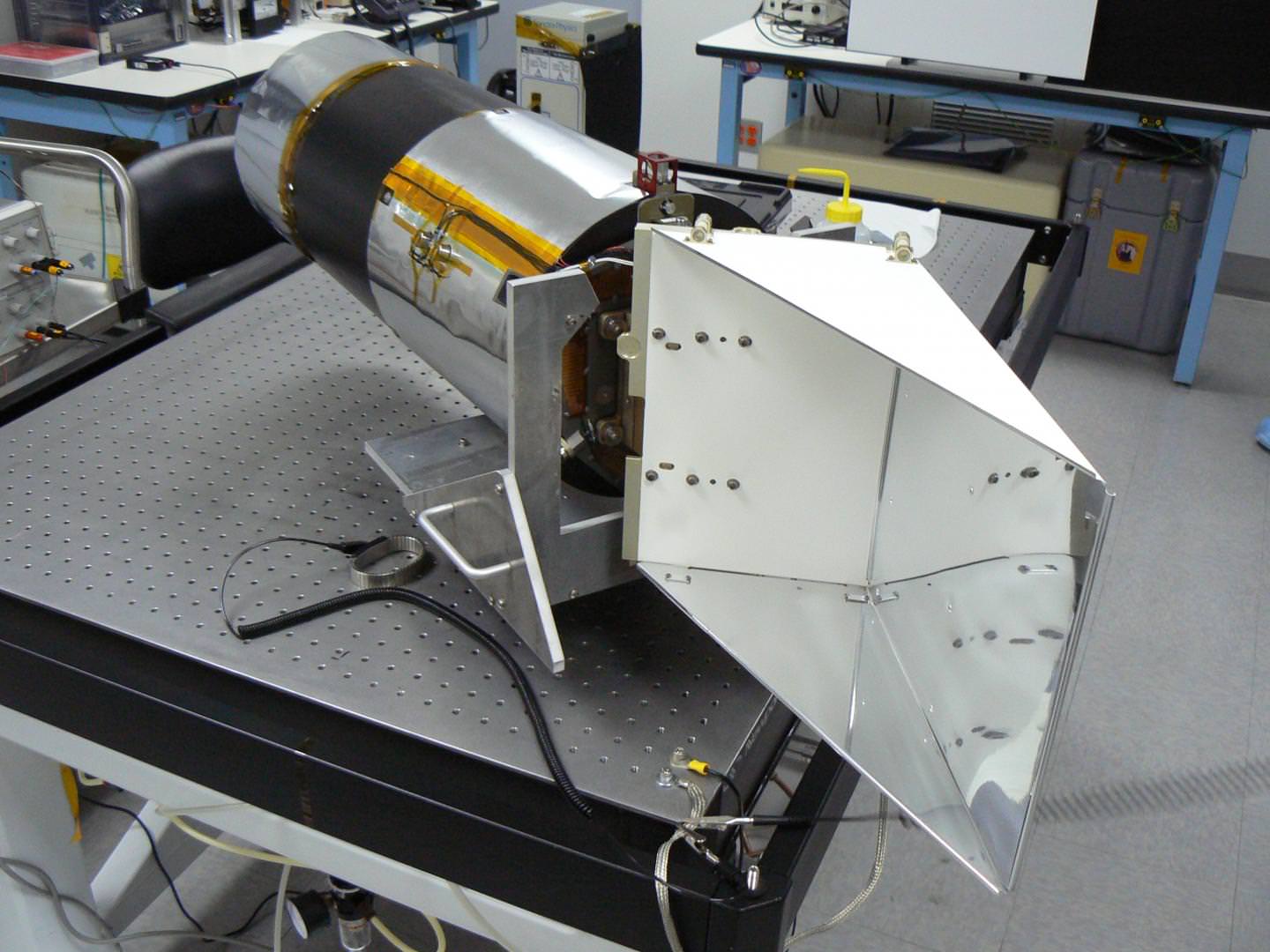
The LROC is a system of three cameras that are mounted aboard the LRO spacecraft. This include two Narrow Angle Cameras (NACs) – which capture high-resolution black and white images – and a third Wide Angle Camera (WAC), which captures moderate resolution images that provide information about the properties and color of the lunar surface.
The NAC on a bench in the clean room at Malin Space Science Systems. Credit: Courtesy of Malin Space Science Systems/ASU SESE
The NACs works by building an image one line at a time, with thousands of lines being used to compile a full image. In between the capture process, the spacecraft moves the camera relative to the surface. On October 13th, 2014, at precisely 21:18:48 UTC, the camera added a line that was visibly distorted. This sent the LRO team on a mission to investigate what could have caused it.
Led by Mark Robinson – a professor and the principal investigator of the LROC at Arizona State University’s School of Earth and Space Exploration – the LROC researchers concluded that the left Narrow Angle Camera must have experienced a brief and violent movement. As there were no spacecraft events – like a solar panel movement or antenna tracking – that might have caused this, the only possibility appeared to be a collision.
As Robinson explained in a recent post on the LROC’s website:
“There were no spacecraft events (such as slews, solar panel movements, antenna tracking, etc.) that might have caused spacecraft jitter during this period, and even if there had been, the resulting jitter should have affected both cameras identically… Clearly there was a brief violent movement of the left NAC. The only logical explanation is that the NAC was hit by a meteoroid! How big was the meteoroid, and where did it hit?”
To test this, the team used a detailed computer model that was developed specifically for the LROC to ensure that the NAC would not fail during the launch of the spacecraft, when severe vibrations would occur. With this model, the LROC team ran simulations to see if they could reproduce the distortions that would have caused the image. Not only did they conclude it was the result of a collision, but they were also able to determine the size of the meteoroid that hit it.
LROC Narrow Angle Camera (NAC). Credit: ASU/LROC SESE
The results indicated that the impacting meteoroid would have measured about 0.8 mm in diameter and had a density of a regular chondrite meteorite (2.7 g/cm³). What’s more, they were able to estimate that it was traveling at a velocity of about 7 km/s (4.3 miles per second) when it collided with the NAC. This was rather surprising, given the odds of collisions and how much time the LRO spends gathering data.
Typically, the LROC only captures images during daylight hours, and for about 10% of the day. So for it to have been hit while it was also capturing images is statistically unlikely – only about 5% by Robinson’s own estimate. Luckily, the impact has not caused any technical problems for the LROC, which is also something of a minor miracle. As Robinson explained:
“For comparison, the muzzle velocity of a bullet fired from a rifle is typically 0.5 to 1.0 kilometers per second. The meteoroid was traveling much faster than a speeding bullet. In this case, LROC did not dodge a speeding bullet, but rather survived a speeding bullet! LROC was struck and survived to keep exploring the Moon, thanks to Malin Space Science Systems’ robust camera design.”
It was only after the team deduced that no damage had been caused that prompted the announcement. According to John Keller, the LRO project scientist from NASA’s Goddard Space Flight Center, the real story here was how the imagery that was being acquired at the time was used to deduce how and when the LRO had been struck by a meteoroid.
Artist’s rendering of Lunar Reconnaissance Orbiter (LRO) in orbit. Credit: ASU/LROC
“Since the impact presented no technical problems for the health and safety of the instrument,” he said, “the team is only now announcing this event as a fascinating example of how engineering data can be used, in ways not previously anticipated, to understand what is happening to the spacecraft over 236,000 miles (380,000 kilometers) from the Earth.”
In addition, the impact of a meteoroid on the LRO demonstrates just how precious the information that missions like the LRO provides truly is. Beyond mapping the lunar surface, the orbiter was also able to let its science team know exactly and when its images were comprised, all because of the high-quality data it collects.
Since it launched in June of 2008, the LRO has collected an immense amount of data on the lunar surface. The mission has been extended several times, from its original duration of two years to the just under nine. Its ongoing performance is also a testament to the durability of the craft and its components.
Be sure to enjoy this video of the images obtained by the LRO, courtesy of the LROC team:
The Moon, tiny Earth and the vastness of space,as seen by the Lunar Reconnaissance Orbiter Wide Angle Camera (WAC). Credit: NASA/GSFC/Arizona State University.
That’s Earth. That’s us. Way off in the distance as a fairly small, blue and swirly white sphere. This is the newest so-called “Earthrise” image, and it was taken on February 1, 2014 by the Lunar Reconnaissance Orbiter.
“LRO experiences twelve earthrises every day, however LROC is almost always busy imaging the lunar surface so only rarely does an opportunity arise such that LROC can capture a view of the Earth,” wrote LROC Principal Investigator Mark Robinson on the instrument’s website. “On the first of February of this year LRO pitched forward while approaching the north pole allowing the LROC WAC to capture the Earth rising above Rozhdestvenskiy crater (180-km diameter).”
Robinson went on to explain that the Earth is a color composite from several frames and the colors are very close to what the average person would see if they were looking back at Earth themselves from lunar orbit. “Also, in this image the relative brightness between the Earth and the Moon is correct, note how much brighter the Earth is relative to the Moon,” Robinson said.
Gorgeous.
Below is a gif image that demonstrates how images are combined over several orbits to create a full image from the Wide Angle Camera.
A gif image showing the “venetian blind” banding demonstrates how a WAC image is built up frame-by-frame. The gaps between the frames are due to the real separation of the WAC filters on the CCD. Credit: NASA/GSFC/Arizona State University.
The frames were acquired at two second intervals, so the total time to collect the sequence was 5 minutes. The video is faster than reality by a factor of about 20.
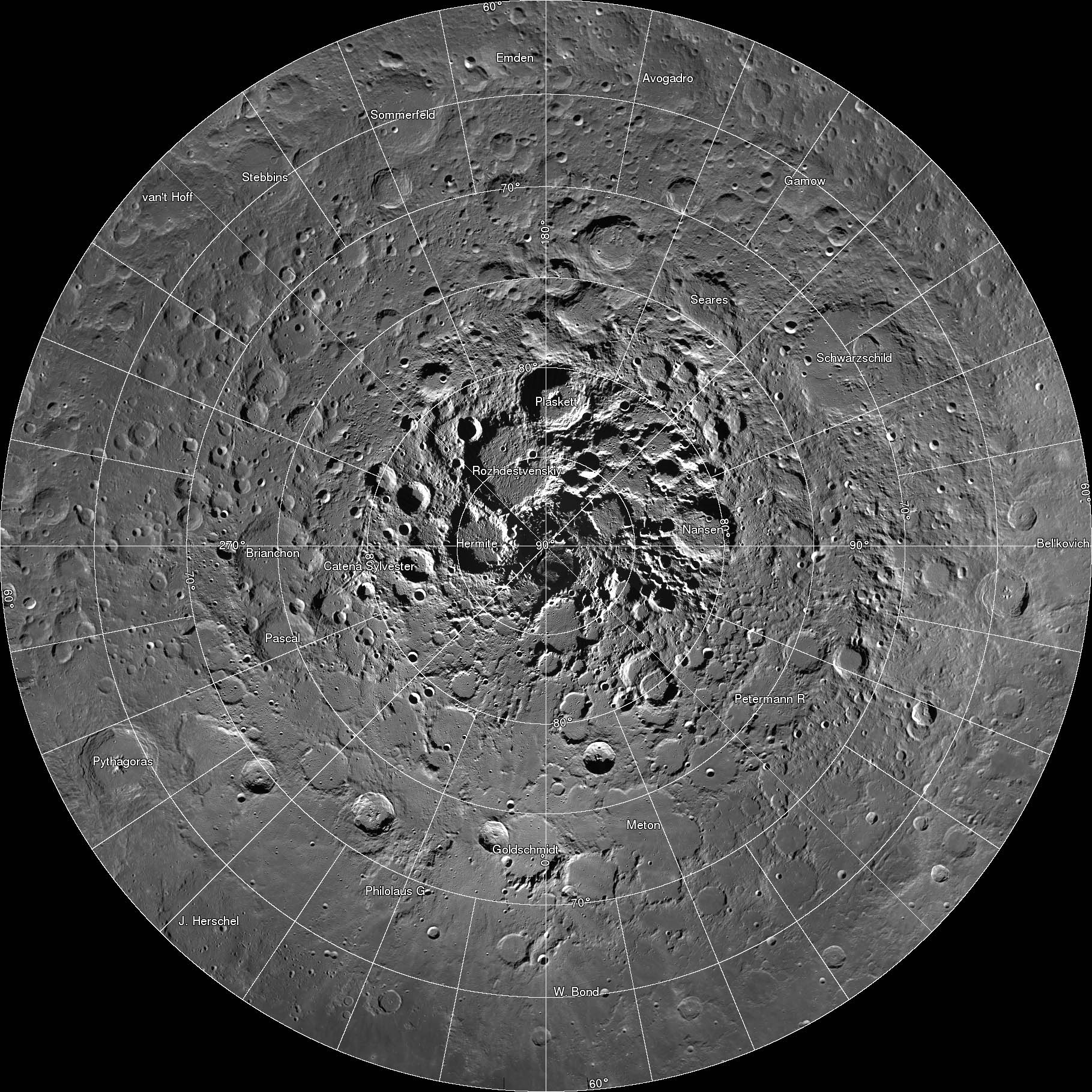
A new interactive mosaic from NASA's Lunar Reconnaissance Orbiter covers the north pole of the moon from 60 to 90 degrees north latitude at a resolution of 6-1/2 feet (2 meters) per pixel. Close-ups of Thales crater (right side) zoom in to reveal increasing levels of detail.
Image Credit: NASA/GSFC/Arizona State University
OMG – breathtaking! That was my reaction when I clicked on this incredible new interactive map of the moon’s north polar region. Be prepared to be amazed. It took four years and 10,581 images for the LROC (Lunar Reconnaissance Orbiter Camera) team to assemble what’s believed to be the largest publicly available image mosaic in existence. With over 650 gigapixels of data at a resolution of 2 meters per pixel, you’ll feel like you’re dropping in by parachute to the lunar surface.
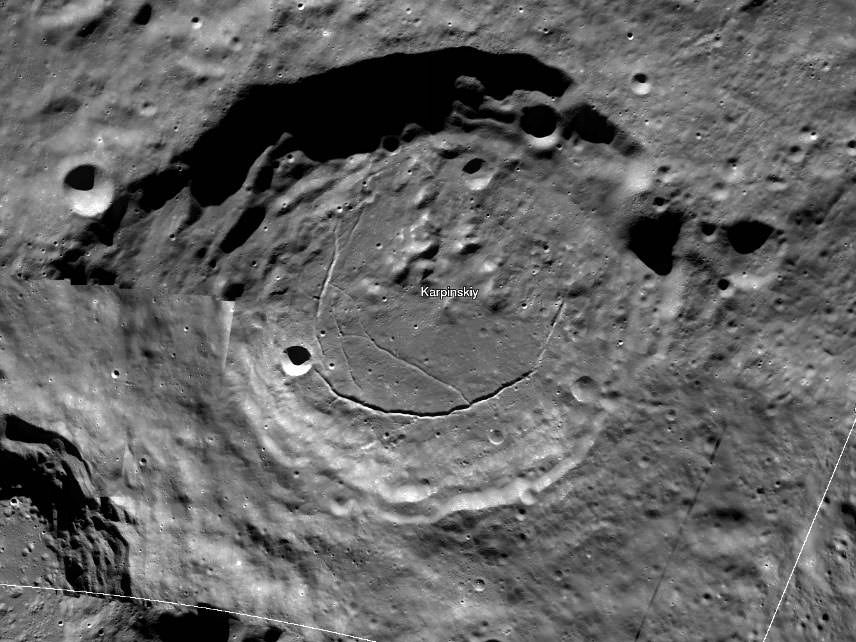
Wide view of the 91-km Karpinskiy Crater from the new interactive north pole mosaic. See image below for a zoomed-in view. Credit: NASA/GSFC/Arizona State Univ.
When you call up the map, be sure to click first on the full-screen button below the zoom slider. Now you’re ready for the full experience. With mouse in hand, you’re free to zoom and pan as you please. Take in the view of Whipple Crater shadowed in polar darkeness or zoom to the bottom of Karpinskiy Crater and fly like a bird over its fractured floor.
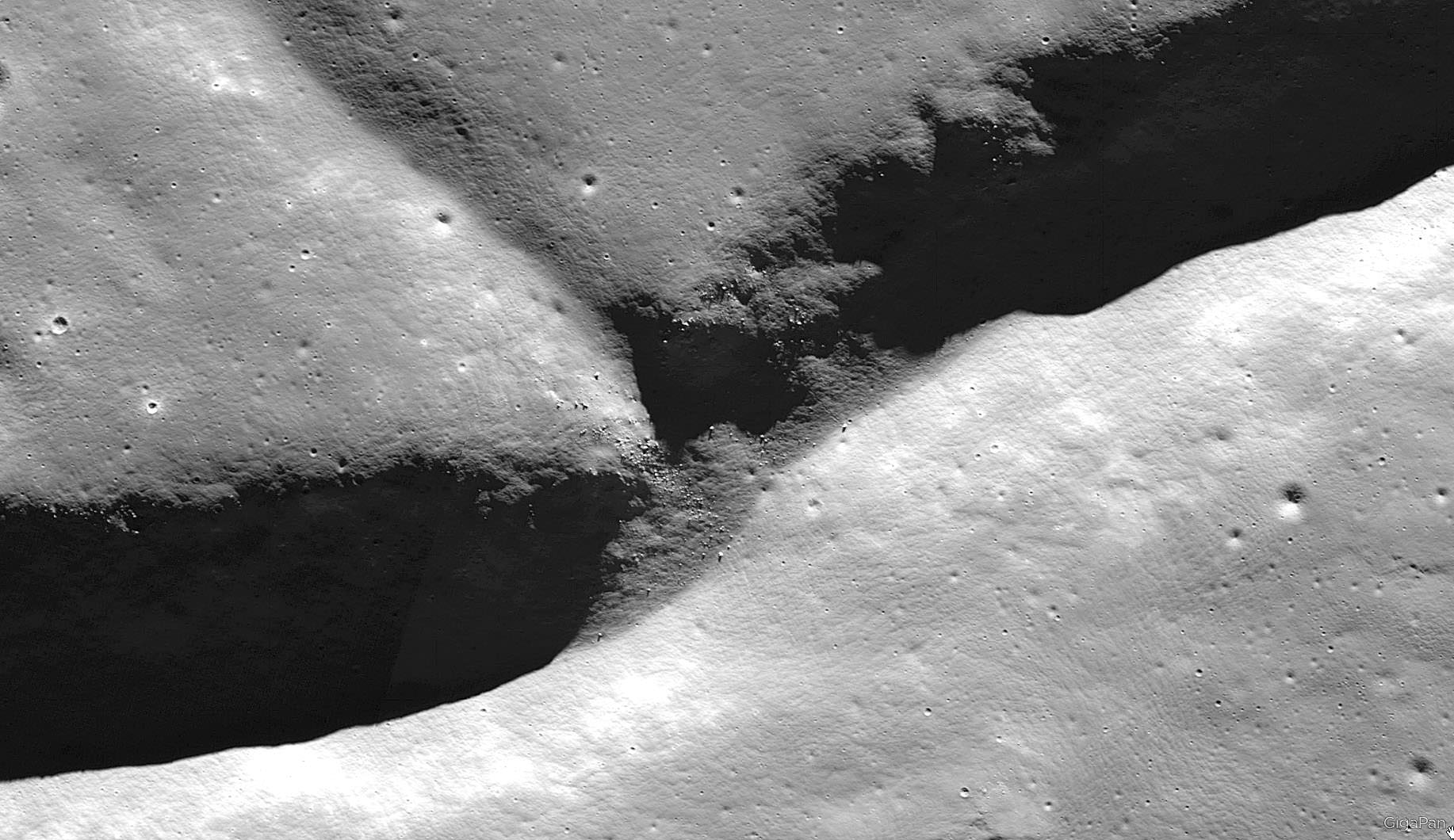
In this photo, we come in for a closer look at the fracture or rill in Karpinskiy’s floor. Notice the small, lighter-toned boulders on the cliff side. The images were all taken with the Lunar Reconnaissance Orbiter’s Narrow Angle Camera (NAC). Credit: NASA/GFSC/Arizona State Univ.
The images are so detailed and the zoom so smooth, there’s nothing artificial about the ride. Except the fact you’re not actually orbit. Darn close though. All the pictures were taken over the past few years by NASA’s Lunar Reconnaissance Orbiter which can fly as low as 50 km (31 miles) over the lunar surface and resolve details the size of a desk.
Printed at 300 dpi – a high-quality printing resolution that requires you to peer very closely to distinguish pixels – the mosaic map would be larger than a football field. Credit: NASA
There are 10 snapshots along the bottom of the map – click them and you’ll be swiftly carried directly to that feature. One of them is the lunar gravity probe GRAIL-B impact site.
The region the gigapixel map covers superimposed on the outline of the U.S. Credit: NASA
To create the 2-D map, a polar stereographic projection was used in to limit mapping distortions. In addition, the LROC team used information from the LOLA and GRAIL teams and an improved camera pointing model to accurately project each image in the mosaic to within 20 meters. For more information on the project, click HERE.
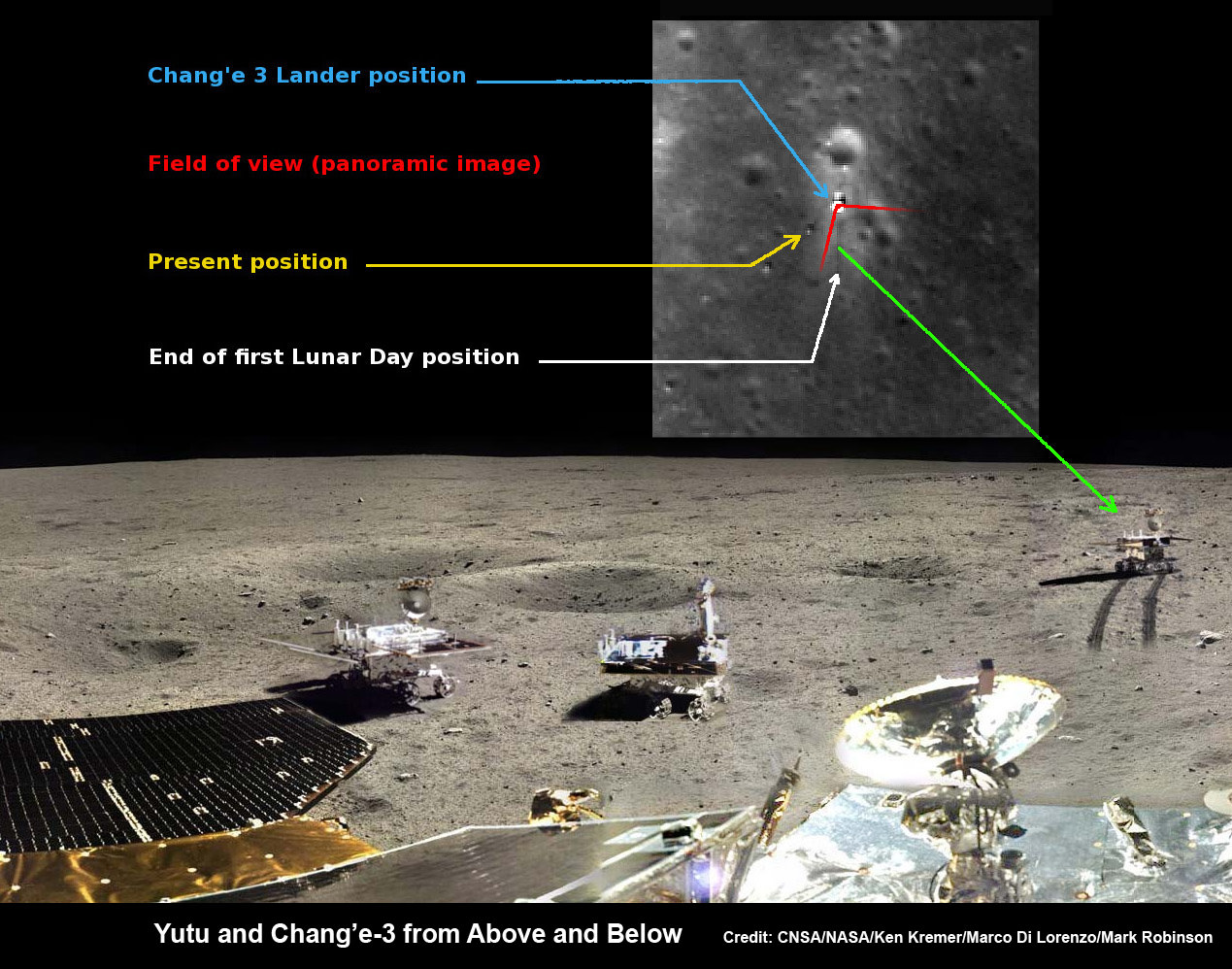
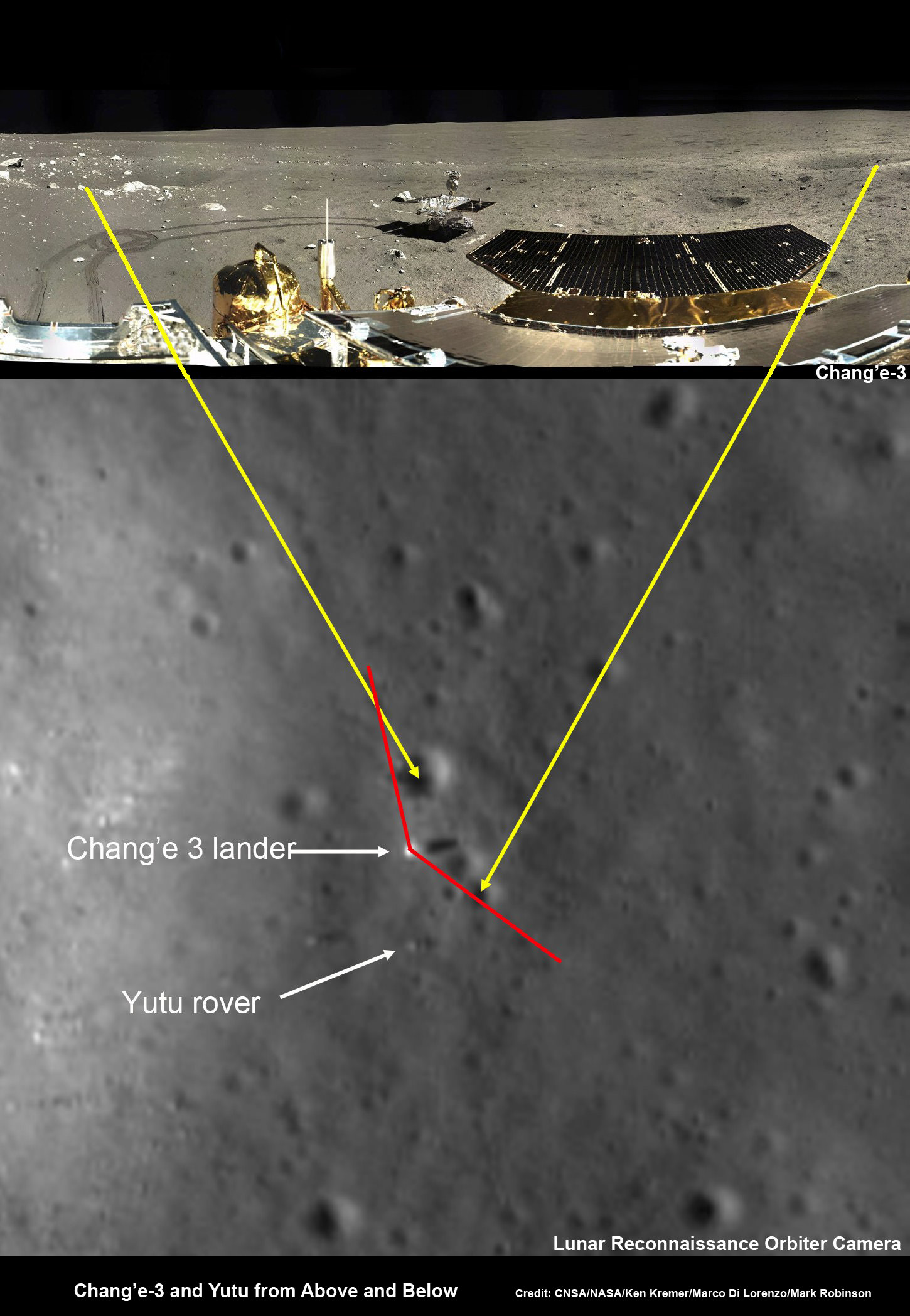
Yutu rover drives around Chang’e-3 lander – from Above And Below. Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu rover drives around Chang’e-3 lander – from Above And Below
Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time.
Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
See below more mosaics and LRO imagery
Story updated[/caption]
The powerful telescopic camera aboard NASA’s Lunar Reconnaissance Orbiter (LRO) has captured spectacular new images detailing the traverse of China’s Yutu moon rover around the landing site during its first two months exploring the Moon’s pockmarked grey terrain.
The newly released high resolution LRO images even show Yutu’s tracks cutting into the lunar surface as the world famous Chinese robot drove in a clockwise direction around the Chang’e-3 lander that delivered it to the ground in mid-December 2013.
You can precisely follow Yutu’s movements over time – from ‘above and below’ – in our new composite view (shown above) combining the latest LRO image with our timelapse mosaic showing the rover’s history making path from the touchdown point last December to today’s location.
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
Barely seven hours after touchdown, the six wheeled moon buggy drove down a pair of ramps onto the desolate gray plains of the lunar surface at Mare Imbrium (Sea of Rains) covered by volcanic material.
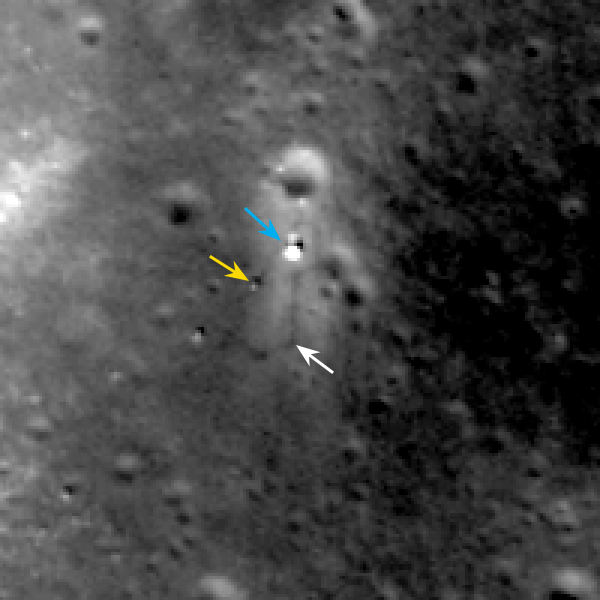
LROC February 2014 image of Chang’e 3 site. Blue arrow indicates Chang’e 3 lander; yellow arrow points to Yutu (rover); and white arrow marks the December location of Yutu. Yutu’s tracks can be followed clockwise around the lander to its current location. Image width 200 meters (about 656 feet). Credit: NASA/Goddard/Arizona State University
Altogether three images of the rover and lander have been taken to date by the Lunar Reconnaissance Orbiter Camera (LROC) aboard LRO – specifically the hi res narrow angle camera (NAC).
The LROC NAC images were captured on Dec. 25, 2013, Jan. 21, 2014 and Feb. 17, 2014 as LRO soared overhead.
The four image LRO composite below includes a pre-landing image taken on June 30, 2013.
Four LROC NAC views of the Chang’e 3 landing site. A) before landing, June 30, 2013 B) after landing, Dec. 25, 2013 C) Jan. 21, 2014 D) Feb. 17, 2014 Width of each image is 200 meters (about 656 feet). Follow Yutu’s path clockwise around the lander in “D.” Credit: NASA/Goddard/Arizona State University
Since the solar incidence angles were different, the local topography and reflectance changes between images showing different levels of details.
“In the case of the Chang’e 3 site, with the sun higher in the sky one can now see the rover Yutu’s tracks (in the February image),” wrote Mark Robinson, Principal Investigator for the LROC camera in an LRO update.
The solar powered rover and lander can only operate during periods of lunar daylight, which last 14 days each.
During each lunar night, they both must power down and enter hibernate mode since there is no sunlight available to generate power and no communications are possible with Earth.
Here is a gif animation from the NASA LRO team combining all four LROC images.
Four views of the Chang’e 3 landing site from before the landing until Feb. 2014. Credit: NASA/GSFC/Arizona State University
During Lunar Day 1, Yutu drove down the landers ramps and moved around the right side in a clockwise direction.
By the end of the first lunar day, Yutu had driven to a position about 30 meters (100 feet) south of the Chang’e-3 lander, based on the imagery.
See our complete 360 degree timelapse color panorama from Lunar Day 1 herein and at NASA APOD on Feb. 3, 2014 – assembled by Marco Di Lorenzo and Ken Kremer.
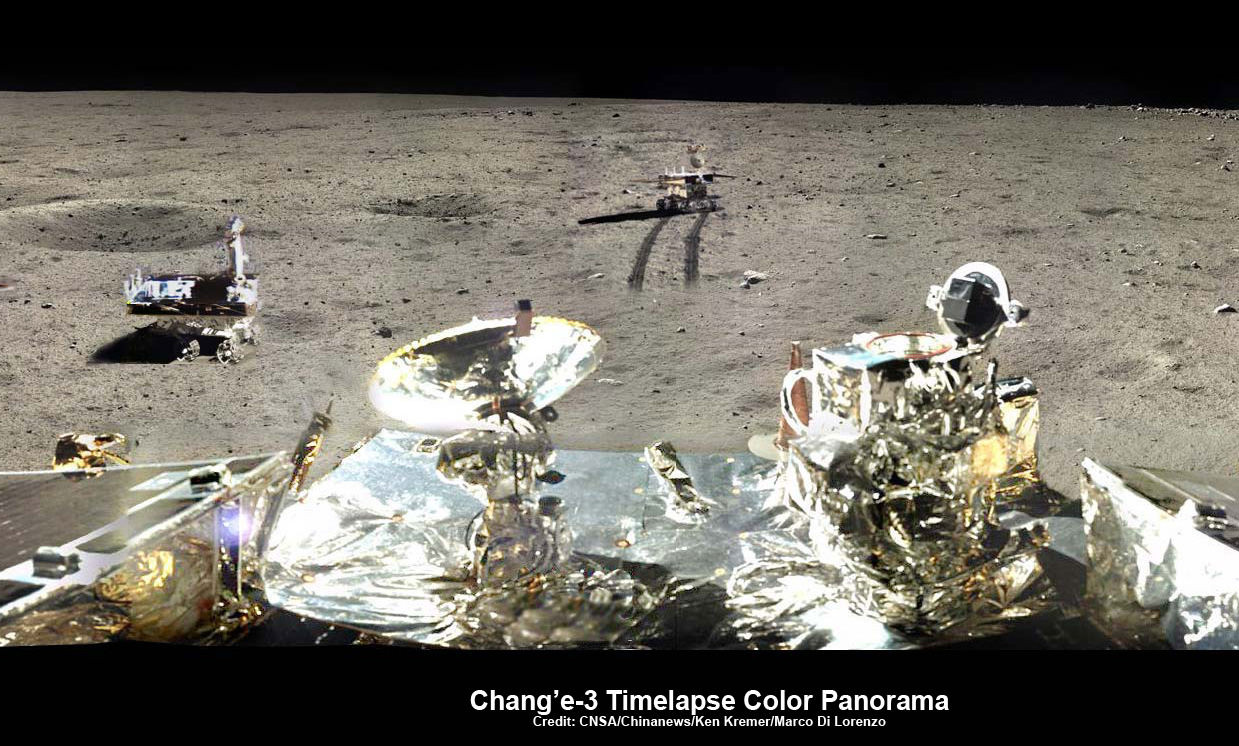
360-degree time-lapse color panorama from China’s Chang’e-3 lander. This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
After awakening for Lunar Day 2, Yutu then moved northwest and parked about 17 meters (56 feet) southwest of the lander, according to Robinson.
By comparing the Janaury and February images “it is apparent that Yutu did not move appreciably from the January location,” said Robinson.
At this moment Yutu and the companion Chang’e-3 lander are sleeping through their 3rd Lunar Night.
They entered hibernation mode on Feb. 22 and Feb. 23, 2014 respectively.
Hopefully both probes will awaken from their slumber sometime in the next week when the Moon again basks in daylight glow to begin a 4th day of lunar surface science operations.
“We all wish it would be able to wake up again,” said Ye Peijian, chief scientist of the Chang’e-3 program, according to CCTV, China’s state run broadcaster.
However, the hugely popular ‘Yutu’ rover is still suffering from an inability to maneuver its life giving solar panels. It is also unable to move – as I reported here.
The 140 kg rover is now nearing its planned 3 month long life expectancy on a moon roving expedition to investigate the moon’s surface composition and natural resources.
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF astro/space convention on April 12/13.
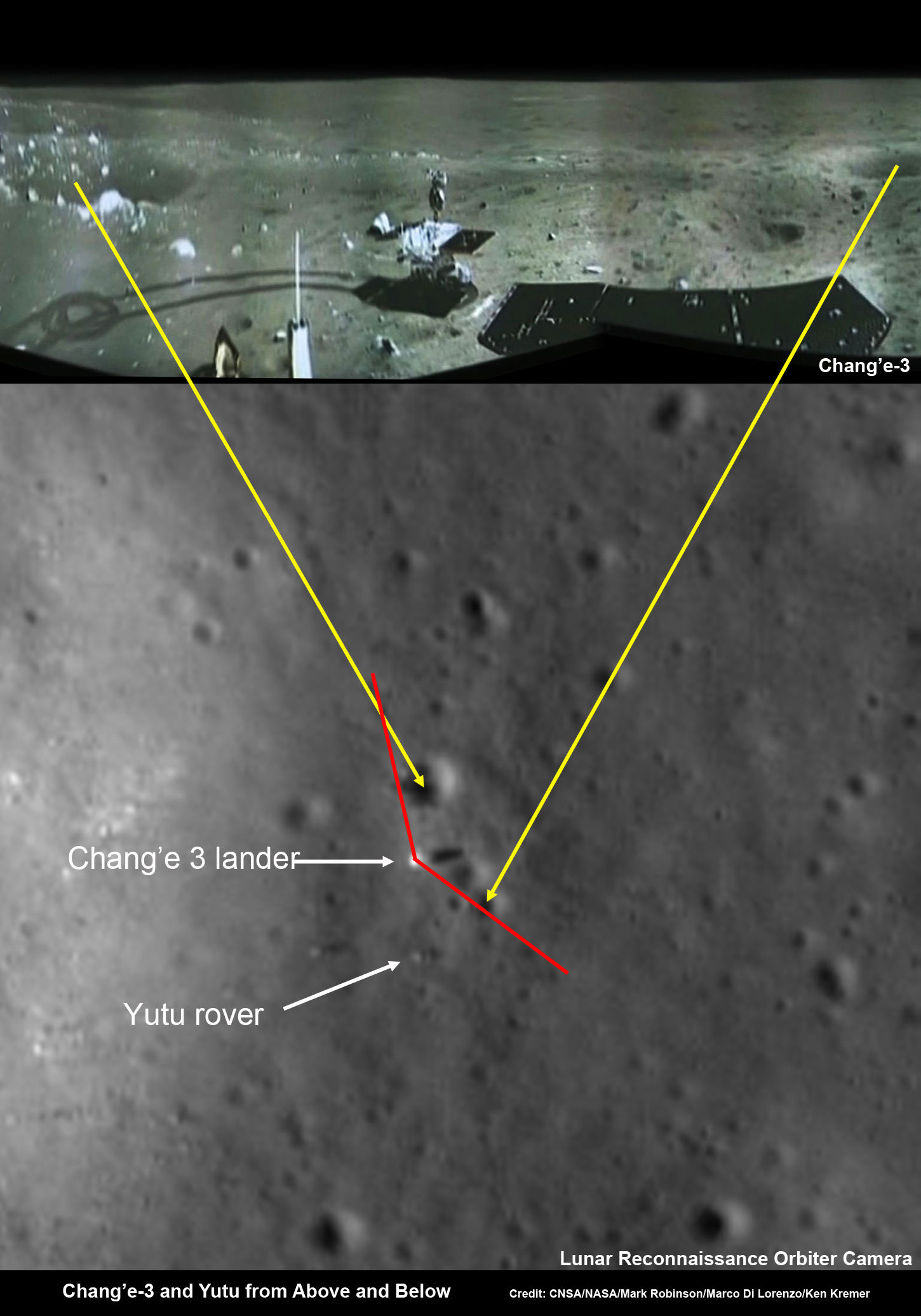
Chang’e-3 lander and Yutu rover – from Above And Below Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
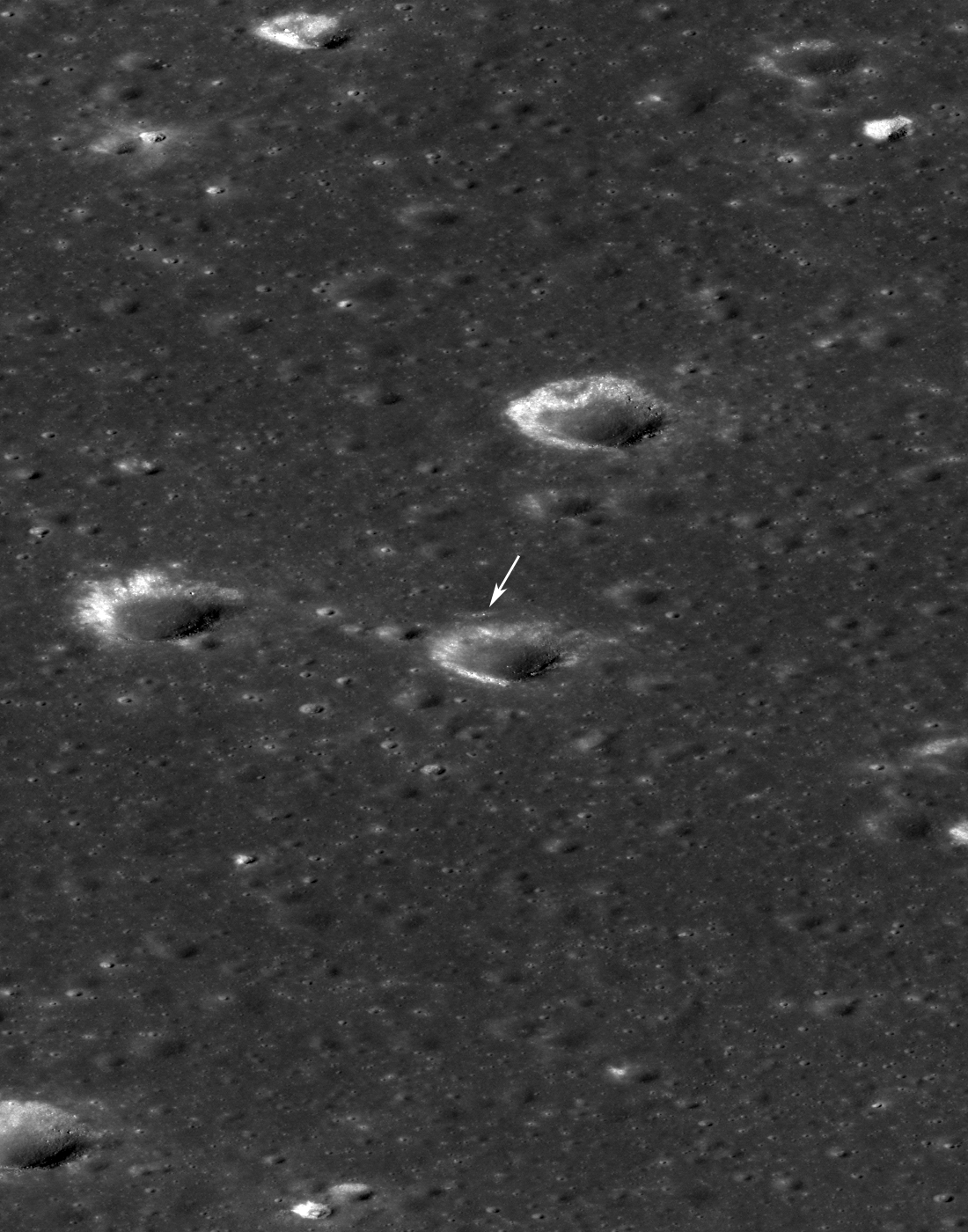
LRO slewed 54 degrees to the east on Feb. 16, 2014, to allow the LROC instrument to snap a dramatic oblique view of the Chang’e 3 site (arrow). Crater in front of lander is 450 meters (about 1,476 feet) in diameter. Image width is 2,900 meters (about 9,500 feet) at the center. Credit: NASA/Goddard/Arizona State University
Chang’e-3 lander and Yutu rover – from Above And Below Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Chang’e-3 lander and Yutu rover – from Above And Below
Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
See further composite and panorama views below
Story updated See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.html[/caption]
China’sChang’e-3 lander and Yutu moon rover have been imaged from above and below – in one of those rare, astounding circumstances when space probes from Earth are exploring an extraterrestrial body both from orbit and the surface. And it’s even more amazing when these otherworldly endeavors just happen to overlap and involve actual work in progress to expand human knowledge of the unknown.
And it’s even rarer, when those images stem from active space probes built by two different countries on Earth.
Well by combining imagery from America’s space agency, NASA, and China’s space agency, CNSA, we are pleased to present some breathtaking views of ‘Chang’e-3 and the Yutu rover from Above and Below.’
Check out our composite mosaic (above) combining the view from the Moon’s orbit snapped by the hi res camera aboard NASA’s Lunar Reconnaissance Orbiter (LRO) with our new color panoramas from the Moon’s surface, compiling imagery from the landing site of China’s Chang’e-3 lander – with Yutu in transit in mid-Dec. 2013 soon after the successful touchdown.
See below an earlier composite mosaic using the first black and white panorama from the Chang’e-3 Moon lander.
Chang’e-3 lander and Yutu rover – from Above And Below
Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander B/W panorama from camera shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Mark Robinson/Marco Di Lorenzo/Ken Kremer – kenkremer.com
The composite mosaic combines the efforts of Mark Robinson, Principal Investigator for the LRO camera, and the imaging team of Ken Kremer and Marco Di Lorenzo.
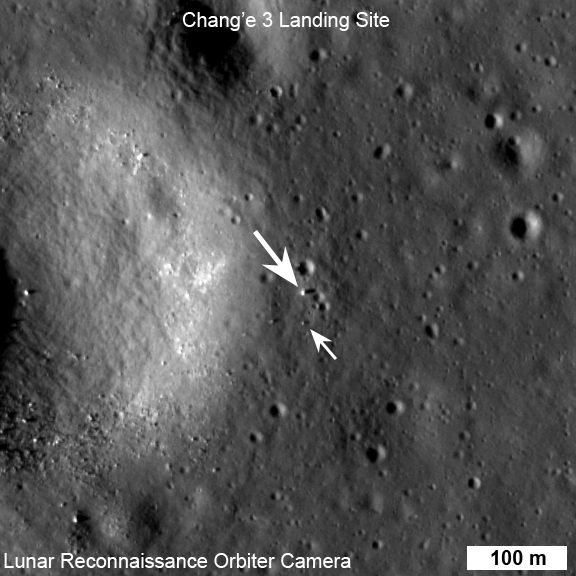
On Christmas eve, Dec. 24, 2013, NASA’s LRO captured it’s first images of China’s Chang’e-3 lander and Yutu moon rover – barely 10 days after the history making touchdown on Mare Imbrium (Sea of Rains) and just 60 meters east of the rim of a 450 meter diameter impact crater.
LRO was orbiting about 150 kilometers above Chang’e-3 and Yutu when the highest resolution orbital image was taken on 24 December 22:52:49 EST (25 December 03:52:49 UT).
Image of Chang’e-3 (top arrow) and Yutu rover captured by NASA’s Lunar Reconnaissance Orbiter on Dec. 24, 2013
The orbital imagery was taken by the LRO orbiters high resolution Lunar Reconnaissance Orbiter Camera (LROC) – specifically the narrow angle camera (NAC).
See below my pre-launch cleanroom photo of LRO and the LROC cameras and other science instruments.
The Chang’e-3 lander color panorama shows the Yutu rover after it drove down the ramp to the moon’s surface and began driving a significant distance around the landers right side on its journey heading southwards.
1st 360 Degree Color Panorama from China’s Chang’e-3 Lunar Lander
This 1st color panorama from Chang’e-3 lander shows the view all around the landing site after the ‘Yutu’ lunar rover left impressive tracks behind when it initially rolled all six wheels onto the pockmarked and gray lunar terrain on Dec. 15, 2013. Mosaic Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com
Yellow lines connect craters seen in the lander panorama to those seen in the LROC hi res NAC image from LRO, in the composite view.
Robinson identified the lunar craters and determined the field of view on the LROC image.
The LRO image was taken at a later date (on Christmas eve) after the rover had already moved. Red lines on the orbital image indicate the approximate field of view of what is seen in the Chang’e-3 lander panorama.
Although Yutu is only about 150 cm wide – which is the same as the pixel size – it shows up in the NAC images for two reasons.
“The solar panels are very effective at reflecting light so the rover shows up as two bright pixels, and the Sun is setting thus the rover casts a distinct shadow (as does the lander),” says NASA in a statement.
In a historic first for China, the Chang’e-3 spacecraft safely touched down on the Moon at Mare Imbrium near the Bay of Rainbows nearly seven weeks ago on Dec. 14, 2013.
Seven hours later, the piggybacked 140 kg Yutu robot drove off a pair of ramps, onto the Moon and into the history books.
Yutu was about 10 meters away from the 1200 kg stationary lander when the lander panoramic images were taken.
The lander and Yutu were just completing their 1st Lunar Day of explorations when the LROC images were taken, and entered their first period of hibernation soon thereafter on Dec. 25 (Christmas Day) and Dec 26 respectively coinciding with the start of their 1st Lunar Night.
However, Yutu’s future mission is now in jeopardy following a serious mechanical anomaly this past weekend as both vehicles entered their 2nd hibernation period.
Apparently one of the solar panels did not fold back properly – perhaps due to dust accumulation – and its instruments may not survive.
Yutu’s fate will remain unknown until the 3rd Lunar Day starts around Feb. 8 or 9.
So, What’s the terrain like at the Mare Imbrium landing site?
Chang’e-3 landed on a thick deposit of volcanic material.
“A large scale wrinkle ridge (~100 km long, 10 km wide) cuts across the area and was formed as tectonic stress caused the volcanic layers to buckle and break along faults. Wrinkle ridges are common on the Moon, Mercury and Mars,” says Robinson.
“The landing site is on a blue mare (higher titanium) thought to be about 3.0 billion years old.”
Older red mare about from 3.5 billion years is only 10 km to the north, he notes.
See our Chang’e-3 color panoramas now featured at NBC News and Space.com
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more news.
NASA’s Lunar Reconnaissance Orbiter (LRO) LROC Wide angle camera (WAC) color (689 nm, 415 nm, 321 nm) overlain on WAC sunset BW image. Note the proximity of the landing site to a contact between red and blue maria. Credit: NASA/GSFC/Arizona State University
NASA’s LRO spacecraft (top) protected by gray colored blankets is equipped with 7 science instruments located at upper right side of spacecraft. LRO is piggybacked atop NASA’s LCROSS spacecraft. Payload fairing in background protects the spacecraft during launch and ascent on Atlas V rocket. Credit: Ken Kremer