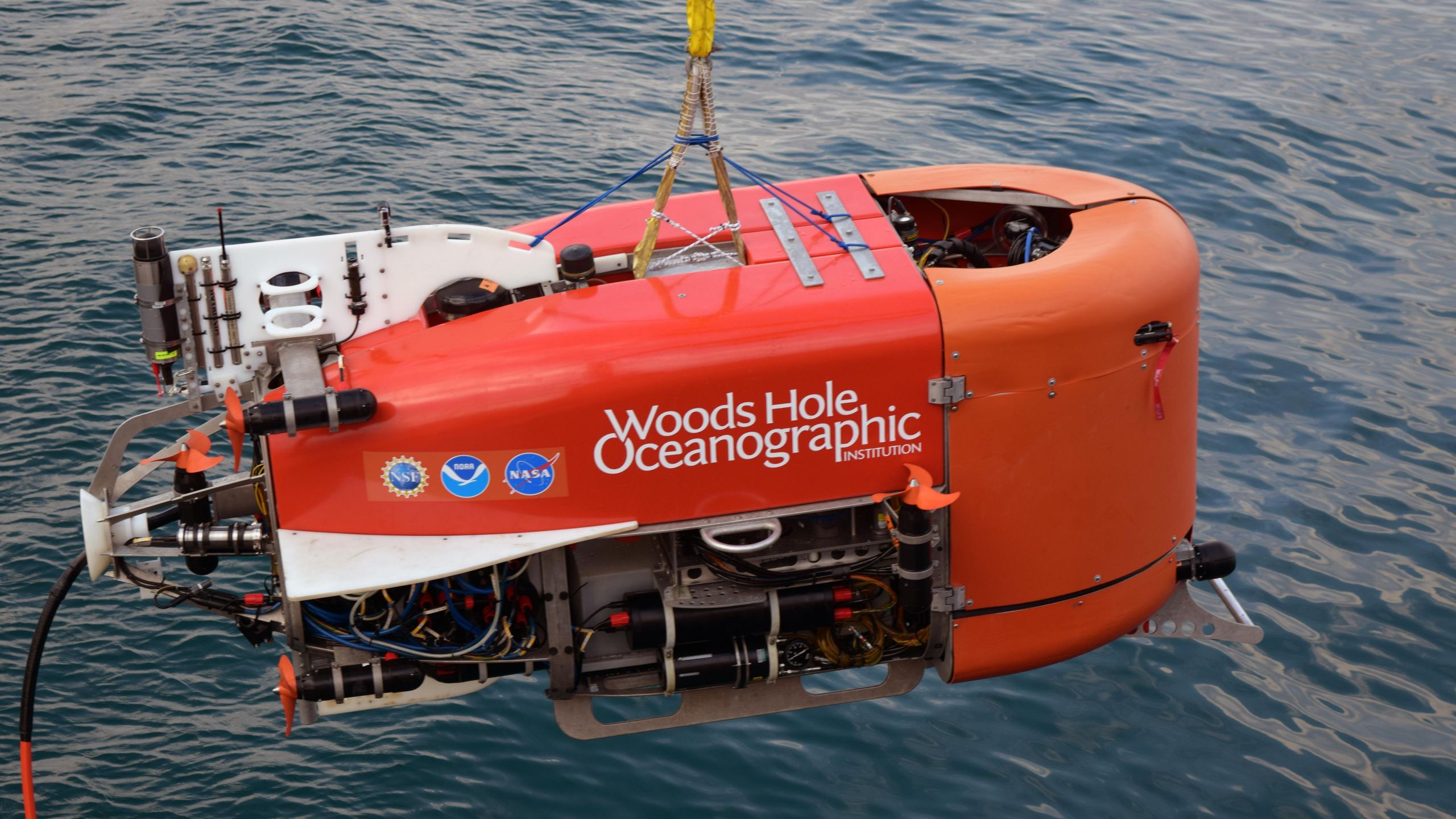
The Woods Hole Oceanographic Institution (WHOI) says their underwater robot has just completed the first-ever automated underwater sampling operation. The robot is called Nereid Under Ice (NEI) and it collected the sample in Greece. WHOI is developing Nereid in association with NASA's Planetary Science and Technology from Analog Research (PSTAR) program.
NUI is a little smaller than a Smart Car, and weighs about 1800 kg (3960 lbs.) and it's doing some important scientific work here on Earth. In last month's mission, it collected a sample from the Kolombo Volcano, an active underwater volcano near Greece's Santorini Island. Part of the crater floor is a field of hydrothermal vents covered with a thick bacterial mat. The sample NUI collected will be used to study microbial life.
"One of our goals was to toss out the joystick, and we were able to do just that." Rich Camilli, WHOI Associate Scientist, Automation Technology Development Lead
NUI's development stems from the demands of future missions to some of the moons in our Solar System, like Europa and Ganymede, that have subsurface oceans. Exploring those worlds will require a new type of robot that can work autonomously underwater, rather than rove around on the surface.
Rich Camilli is an associate scientist at WHOI leading the development of automation technology as part of NASA’s Planetary Science and Technology from Analog Research (PSTAR) interdisciplinary research program. In a press release, Camilli said, "For a vehicle to take a sample without a pilot driving it was a huge step forward. One of our goals was to toss out the joystick, and we were able to do just that."
With the advent of self-driving cars, we're getting used to the idea of automated vehicles. But the underwater environment is much different—and much more hazardous—than a paved surface road. Developing a robust enough artificial intelligence for that environment is a challenge. Camilli was part of an international team of researchers studying life at Kolombo, a harsh chemically-rich environment. But Camilli was also there to learn more about how autonomous robots can explore underwater environments.
NUI's artificial intelligence includes a software planner called "Spock." Spock allows NUI to not only take samples autonomously, but also to select the best sites for those samples. On a distant moon, in a subsurface ocean, this type of sophisticated advanced AI will be necessary.
"If we have this grand vision of sending robots to places like Europa and Enceladus, they will ultimately need to work independently like this and without the assistance of a pilot." Gideon Billings, University of Michigan
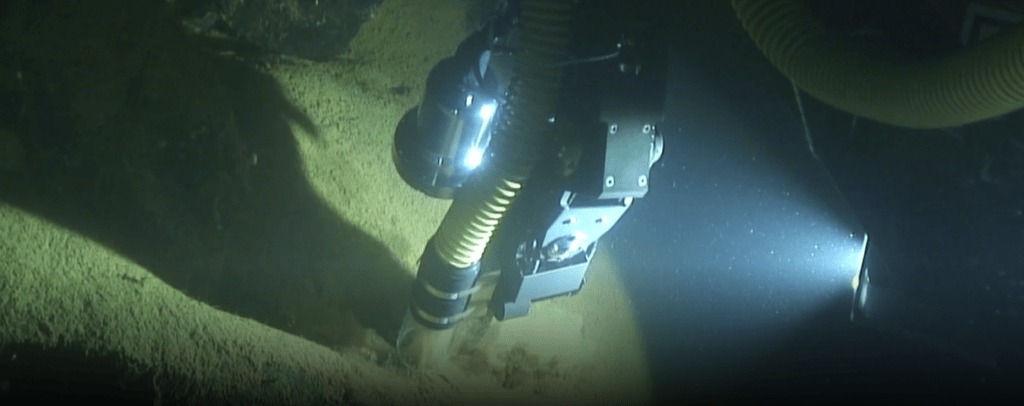
Gideon Billings is a guest student from the University of Michigan whose thesis research focuses on automated technologies. Billings' code was used to collect this very first sample. He issued a single command to NUI's autonomous manipulator, and NUI did the rest. Within moments, NUI extended its robotic arm and used its slurp-hose sampler to suck up some material.
Billings understands that any mission to study the subsurface oceans of moons like Europa will require extremely advanced, specific technologies, including sophisticated AI. "If we have this grand vision of sending robots to places like Europa and Enceladus [the moons of Jupiter and Saturn, respectively], they will ultimately need to work independently like this and without the assistance of a pilot," he says.

It can take 35 minutes for a radio signal to reach Jupiter from Earth, so a back and forth communication will take over an hour. It's critical that exploration robots can "think" for themselves for periods of time, completing tasks and avoiding hazards. To reach those goals, Billings and others will keep working on the AI. Their goal is to "train" robots to see like pilots of ROV's (Remotely Operated Vehicles) with " gaze-tracking " technology. They also want to build a robust human-machine interface language so scientists can talk directly to the robotic vehicle, without the need for a pilot to translate commands.
The vision is for a group of ROVs like Nereid Under Ice to work together.
"We can eventually see having a network of cognitive ocean robots where there's a shared intelligence spanning an entire fleet, with each vehicle working cooperatively like bees in a hive," Camilli says. "It will go well beyond losing the joystick."
NUI has been under development for a few years. It's been tested in the Arctic, where it travelled under the ice and gathered data on the warming region. NUI was able to travel further under the ice than any previous vehicle.
NUI is able to travel up to 40 km (25 miles) laterally underwater, much further than the few hundred feet typical of other ROVs. When connected by a thin fiber-optic cable, it can transmit high definition video back to its mother ship. It carries a full suite of acoustic, chemical, and biological sensors, and a seven-function manipulator arm. It can dive down to a depth of 2,000 meters (6500 ft.)
More:
- Press Release: WHOI underwater robot takes first known automated sample from ocean
- WHOI: HROV Nereid Under Ice
- Universe Today: Aquatic Rover Drives on the Underside of the Ice in Antarctica