A still from the "Our Curiosity" video by Jeff Marlow/Caltech. Via @MarsCuriosity
In honor of the 2nd anniversary of the Curiosity rover reaching Mars, Caltech has put out a wonderful new video about the plucky little rover that has captured the hearts and imaginations of people around the world. And some familiar voices do the narration: astrophysicist Neil de Grasse Tyson and actress Felicia Day. The video was created by Caltech planetary scientist Jeff Marlow, and he called it a “love letter” to the rover.
“As scientifically productive as the mission has been, Curiosity’s inspirational capacity may be its true value, its ability to make us feel as if we too are there, crunching on red dirt, pondering the planet’s past environments,” Marlow wrote on Wired.
Enjoy the look back at Curiosity’s travels so far. If you’re like me, the last line in the video (spoken by de Grasse Tyson) will really get you.
Find out more about the video at ourcuriosity.org, where they promise a “making of” video and more will be available soon.
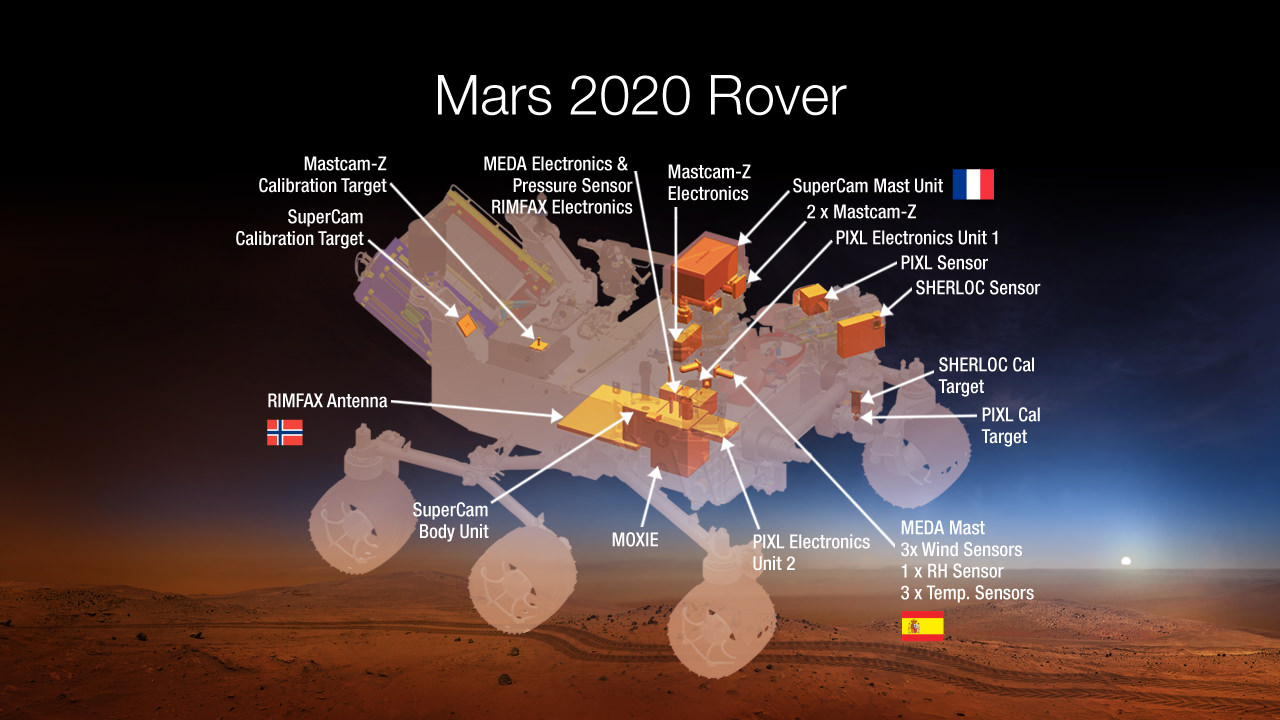
An artist concept image of where seven carefully-selected instruments will be located on NASA’s Mars 2020 rover. The instruments will conduct unprecedented science and exploration technology investigations on the Red Planet as never before. Image Credit: NASA
NASA announced the winners of the high stakes science instrument competition to fly aboard the Mars 2020 rover at a briefing held today, Thursday, July 31, at the agency’s headquarters in Washington, D.C.
The 2020 rover’s instruments goals are to search for signs of organic molecules and past life and help pave the way for future human explorers.
Seven carefully-selected payloads were chosen from a total of 58 proposals received in January 2014 from science teams worldwide, which is twice the usual number for instrument competitions and demonstrates the extraordinary interest in Mars by the science community.
The 2020 rover architecture is based on NASA’s hugely successful Mars Science Laboratory (MSL) Curiosity rover which safely touched down a one ton mass on Mars on Aug. 5, 2012 using the nail-biting and never before used skycrane rocket assisted descent system.
The seven instruments will conduct unprecedented science and technology investigations on the Red Planet that’s aimed for the first time at simultaneously advancing both NASA’s unmanned robotic exploration searching for extraterrestrial life and plans for human missions to Mars in the 2030’s.
Planning for NASA’s 2020 Mars rover envisions a basic structure that capitalizes on the design and engineering work done for the NASA rover Curiosity, which landed on Mars in 2012, but with new science instruments selected through competition for accomplishing different science objectives. Image Credit: NASA/JPL-Caltech
The instruments will have the capability to detect low levels of organic molecules that are essential precursors to life.
A technology demonstration experiment will use Mars natural resources to generate oxygen from atmospheric carbon dioxide that can be used as rocket fuel or for human explorers. This will save enormous costs by enabling astronauts to ‘live off the land’ rather than having to bring everything needed for survival from Earth.
NASA said that the development cost for the chosen instruments is approximately $130 million out of a total cost of $1.9 Billion.
This overall cost is less than Curiosity’s approximate $2.4 Billion cost since the team is rebuilding the rover and landing architecture – sort of an MSL 2 so to speak – developed for Curiosity and also using several left over MSL flight spares.
Mars 2020 builds on the architecture developed for Curiosity.
Curiosity’s panoramic view departing Mount Remarkable and ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 630, May 15, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
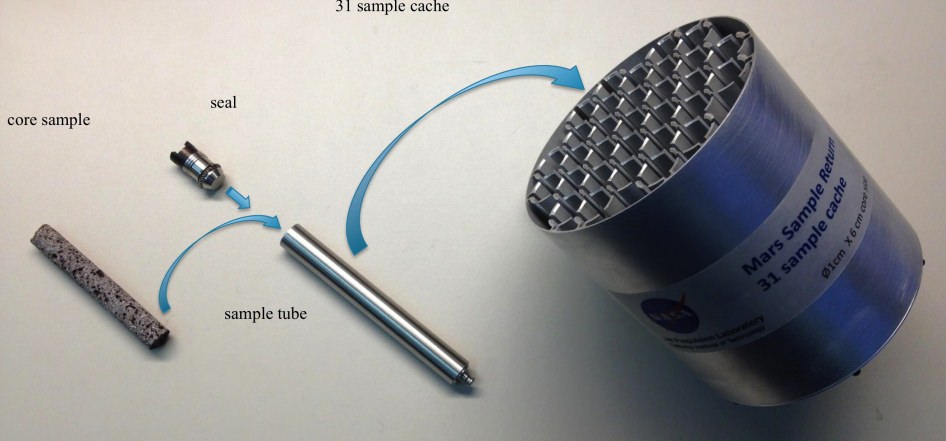
The Mars 2020 rover will also have a sample cacher with the ability to store core samples collected by the rover’s drill for later retrieval and return to Earth at an as yet unspecified time.
“The Mars 2020 rover, with these new advanced scientific instruments, including those from our international partners, holds the promise to unlock more mysteries of Mars’ past as revealed in the geological record,” said John Grunsfeld, astronaut and associate administrator of NASA’s Science Mission Directorate in Washington.
“This mission will further our search for life in the universe and also offer opportunities to advance new capabilities in exploration technology.”
NASA’s Mars 2020 rover will explore the Red Planet like never before. Credit: NASAHere’s a list of the 7 selected science payload proposals. They are in some ways more advanced versions form Curiosity and in other ways completely new:
Mastcam-Z, an advanced camera system with panoramic and stereoscopic imaging capability with the ability to zoom. The instrument also will determine mineralogy of the Martian surface and assist with rover operations. The principal investigator is James Bell, Arizona State University in Phoenix.
SuperCam, an instrument that can provide imaging, chemical composition analysis, and mineralogy. The instrument will also be able to detect the presence of organic compounds in rocks and regolith from a distance. The principal investigator is Roger Wiens, Los Alamos National Laboratory, Los Alamos, New Mexico. This instrument also has a significant contribution from the Centre National d’Etudes Spatiales,Institut de Recherche en Astrophysique et Planetologie (CNES/IRAP) France.
Planetary Instrument for X-ray Lithochemistry (PIXL), an X-ray fluorescence spectrometer that will also contain an imager with high resolution to determine the fine scale elemental composition of Martian surface materials. PIXL will provide capabilities that permit more detailed detection and analysis of chemical elements than ever before. The principal investigator is Abigail Allwood, NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, California.
Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals (SHERLOC), a spectrometer that will provide fine-scale imaging and uses an ultraviolet (UV) laser to determine fine-scale mineralogy and detect organic compounds. SHERLOC will be the first UV Raman spectrometer to fly to the surface of Mars and will provide complementary measurements with other instruments in the payload. The principal investigator is Luther Beegle, JPL.
The Mars Oxygen ISRU Experiment (MOXIE), an exploration technology investigation that will produce oxygen from Martian atmospheric carbon dioxide. The principal investigator is Michael Hecht, Massachusetts Institute of Technology, Cambridge, Massachusetts.
Mars Environmental Dynamics Analyzer (MEDA), a set of sensors that will provide measurements of temperature, wind speed and direction, pressure, relative humidity and dust size and shape. The principal investigator is Jose Rodriguez-Manfredi, Centro de Astrobiologia, Instituto Nacional de Tecnica Aeroespacial, Spain.
The Radar Imager for Mars’ Subsurface Exploration (RIMFAX), a ground-penetrating radar that will provide centimeter-scale resolution of the geologic structure of the subsurface. The principal investigator is Svein-Erik Hamran, Forsvarets Forskning Institute, Norway.
So the instruments are more sophisticated, upgraded hardware versions as well as new instruments to conduct geological assessments of the rover’s landing site, determine the potential habitability of the environment, and directly search for signs of ancient Martian life, according to NASA.
Creating a Returnable Cache of Martian Samples is a major objective for NASA’s Mars 2020 rover. This prototype show hardware to cache samples of cores drilled from Martian rocks for possible future return to Earth. The 2020 rover would be to collect and package a carefully selected set of up to 31 samples in a cache that could be returned to Earth by a later mission. The capabilities of laboratories on Earth for detailed examination of cores drilled from Martian rocks would far exceed the capabilities of any set of instruments that could feasibly be flown to Mars. For scale, the diameter of the core sample shown in the image is 0.4 inch (1 centimeter). Credit: NASA/JPL-Caltech
“Today we take another important step on our journey to Mars,” said NASA Administrator Charles Bolden.
“While getting to and landing on Mars is hard, Curiosity was an iconic example of how our robotic scientific explorers are paving the way for humans to pioneer Mars and beyond. Mars exploration will be this generation’s legacy, and the Mars 2020 rover will be another critical step on humans’ journey to the Red Planet.”
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, commercial space, MAVEN, MOM, Mars and more Earth and Planetary science and human spaceflight news.
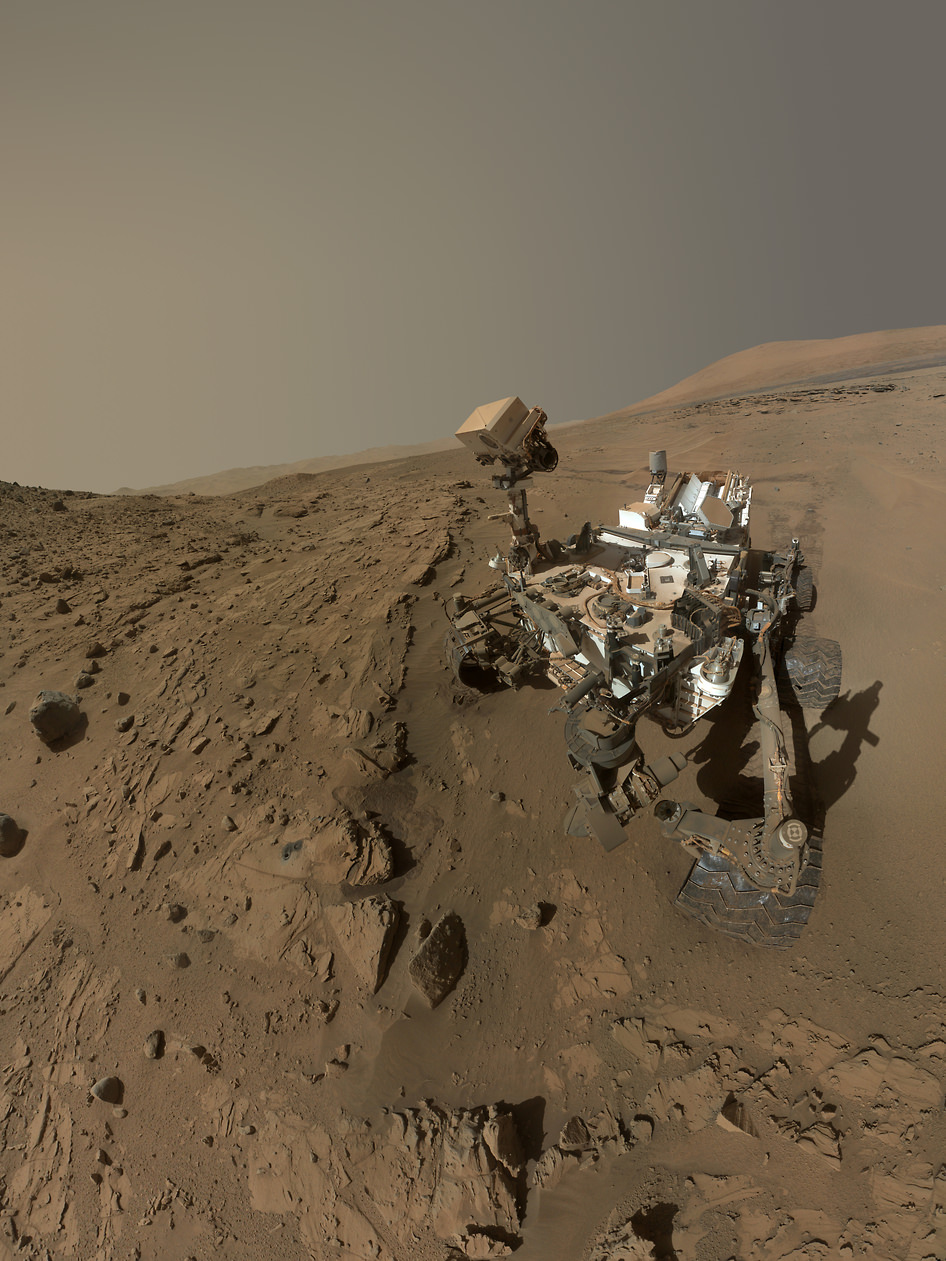
NASA's Mars Curiosity Rover captures a selfie to mark a full Martian year -- 687 Earth days -- spent exploring the Red Planet. Curiosity Self-Portrait was taken at the 'Windjana' Drilling Site in April and May 2014 using the Mars Hand Lens Imager (MAHLI) camera at the end of the roboic arm. Credit: NASA/JPL-Caltech/MSSS
Here’s the latest interactive panorama via panoramacist Andrew Bodrov from imagery taken by the Curiosity Mars at Gale Crater, from Sol 647 (May 1, 2014).
The images for panorama were obtained by the rover’s 34-millimeter Mast Camera. The mosaic, which stretches about 30,000 pixels width, includes 134 images, all taken on Sol 647.
You can see previous interactive panoramas from Andrew of of Curiosity’s images here.
And in case you missed it, here’s Curiosity’s latest “Selfie”:
NASA’s Curiosity rover trundles towards Mount Sharp (right) across the alien terrain of Mars - our Solar Systems most Earth-like planet - and leaves behind dramatic wheel tracks in her wake, with Gale crater rim visible in the distance at left. Curiosity captured this photo mosaic of her wheel tracks, mountain and crater rim on Sol 644 after departing ‘Kimberley’ drill site in mid-May 2014. Navcam raw images were stitched and colorized and contrast enhanced to bring out detail. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Driving, Driving, Driving – that’s the number one priority for NASA’s rover Curiosity as she traverses across the floor of Gale Crater towards towering Mount Sharp on an expedition in search of the chemical ingredients of life that could support Martian microbes if they ever existed.
See our photo mosaics above and below showing the 1 ton rover trundling across the alien terrain of Mars – our Solar Systems most Earth-like planet and leaving behind dramatic wheel tracks in her wake.
“The top priority for MSL continues to be the traverse toward the base of Mt. Sharp,” wrote science team member Ken Herkenhoff in a mission update.
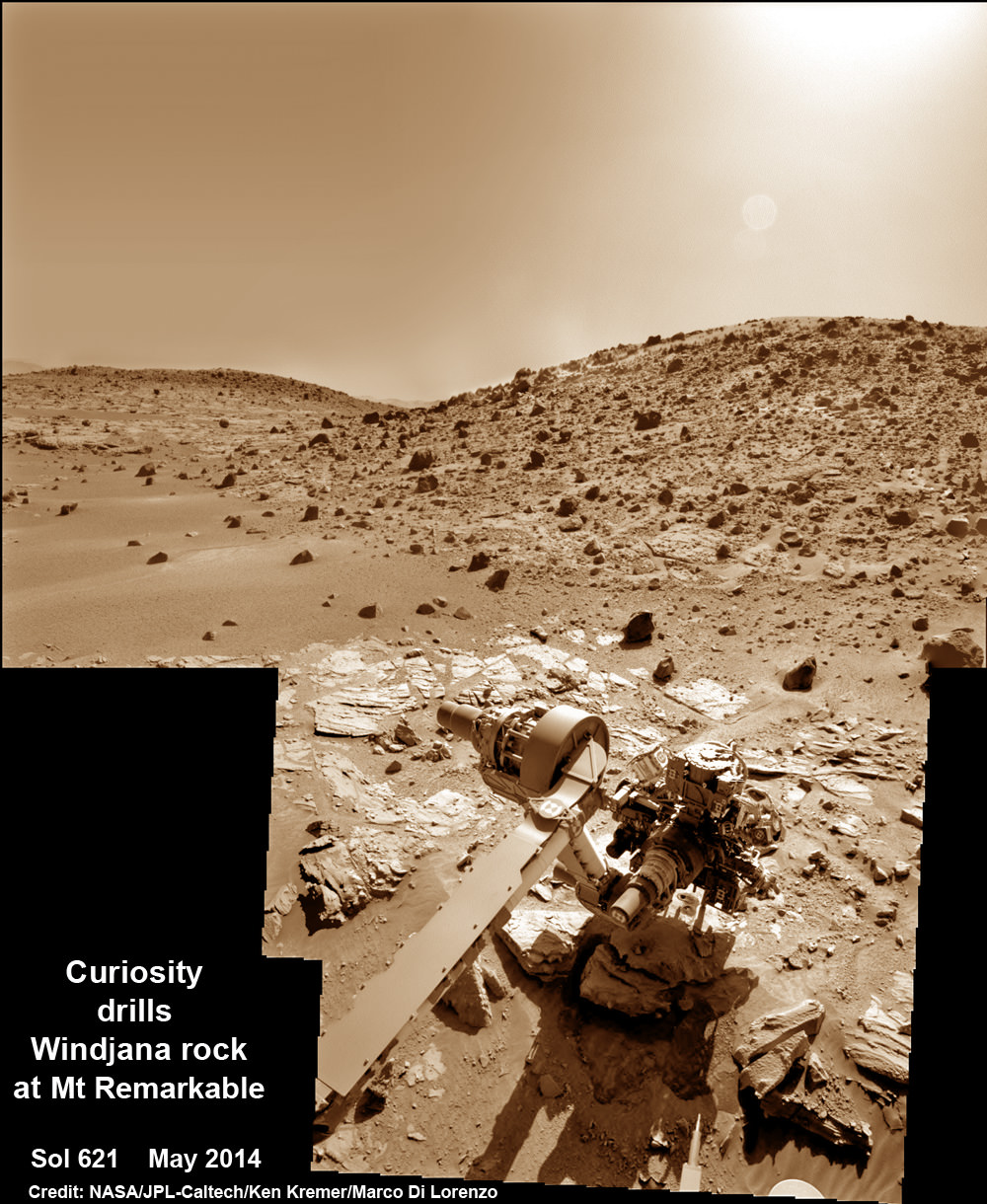
Curiosity has been on the move since mid-May after successfully completing her 3rd Martian drill campaign at a science stopping point called “The Kimberley” where she bored a fresh hole into the ‘Windjama’ rock target on May 5, Sol 621 at the base of Mount Remarkable.
“Progress has been good since leaving The Kimberley,” Herkenhoff added.
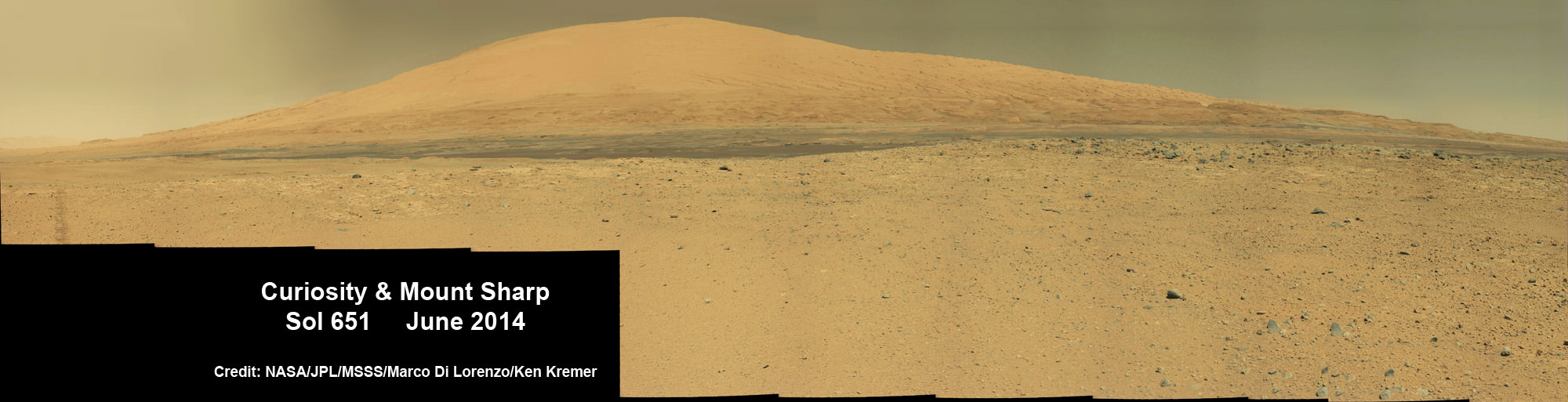
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
The lower reaches of Mount Sharp are the rovers ultimate goal because the sedimentary layers are believed to hold caches of water altered minerals based on high resolution measurements obtained by the CRISM spectrometer aboard NASA’s powerful Martian ‘Spysat’ – the Mars Reconnaissance Orbiter (MRO) – soaring overhead.
Investigating mysterious Mount Sharp is why Gale Crater was chosen as the landing site because the mountain holds clues to the habitability of the Red Planet.
Mars was far wetter and warmer – and more conducive to the origin of life – billions of years ago.
The six-wheeled rover has been traveling with all deliberate speed to get to the mountain with minimal science along the way.
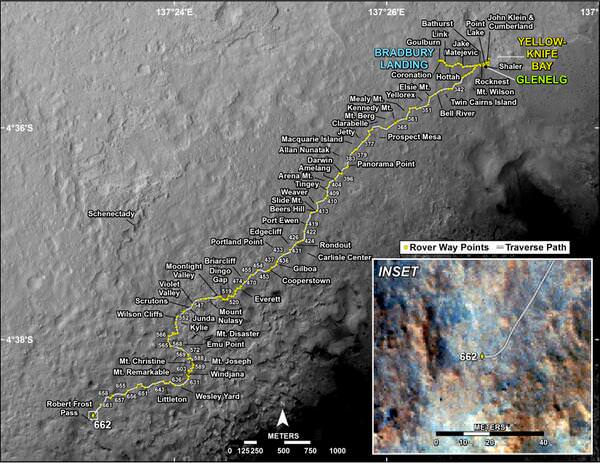
“[Curiosity conducted] a 129-meter drive on Sol 662 (June 17),” says Herkenhoff.
“We successfully planned a rapid traverse sol last week, in which scientific observations are limited in favor of maximizing drive distance.”
Curiosity is driving on a path towards the ‘Murray Buttes’ – which lies across the dark and potentially treacherous dunes on the right side of Mount Sharp as seen in our photo mosaic above from Sol 651.
She will eventually ascend the mountain at the ‘Murray Buttes’ after the team locates a spot to carefully cross the sand dunes.
The fresh hole drilled into “Windjana” was 0.63 inch (1.6 centimeters) in diameter and about 2.6 inches (6.5 centimeters) deep and resulted in a mound of dark grey colored drill tailings piled around. It looked different from the initial two holes drilled at Yellowknife Bay in the spring of 2013.
Windjana was a cold red slab of enticing bumpy textures of Martian sandstone located at the base of ‘Mount Remarkable’ within the “The Kimberley Waypoint” region.
Composite photo mosaic shows deployment of NASA Curiosity rovers robotic arm and two holes after drilling into ‘Windjana’ sandstone rock on May 5, 2014, Sol 621, at Mount Remarkable as missions third drill target for sample analysis by rover’s chemistry labs. The navcam raw images were stitched together from several Martian days up to Sol 621, May 5, 2014 and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
The first two drill campaigns involved boring into mudstone outcrops at Yellowknife Bay.
Windjana lies some 2.5 miles (4 kilometers) southwest of Yellowknife Bay.
Curiosity then successfully delivered pulverized and sieved samples to the pair of onboard miniaturized chemistry labs; the Chemistry and Mineralogy instrument (CheMin) and the Sample Analysis at Mars instrument (SAM) – for chemical and compositional analysis.
Chemical analysis and further sample deliveries are in progress as NASA’s rover is ‘on the go’ to simultaneously maximize movement and research activities.
The science and engineering team has deliberately altered the robots path towards the foothills of Mount Sharp which reaches 3.4 miles (5.5 km) into the Martian sky – taller than Mount Ranier.
The team decided to follow a new path to the mountain with smoother terrain after sharp edged rocks caused significant damage in the form of dents and holes to the robots 20 inch wide aluminum wheels.
The wheel punctures happened faster than expected in 2013 and earlier this year.
Curiosity still has about another 2.4 miles (3.9 kilometers) to go to reach the entry way at a gap in the dunes at the foothills of Mount Sharp sometime later this year.
Curiosity’s panoramic view departing Mount Remarkable and ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 630, May 15, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
To date, Curiosity’s odometer totals over 7.9 kilometers (4.9 miles) since landing inside Gale Crater on Mars in August 2012. She has taken over 159,000 images.
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo.
Featured on APOD – Astronomy Picture of the Day on May 7, 2014 Curiosity Route Map. Credit: NASA/JPL
…………….
Learn more about NASA’s Mars missions, upcoming sounding rocket and Orbital Sciences Antares ISS launch from NASA Wallops, VA in July and more about SpaceX, Boeing and commercial space and more at Ken’s upcoming presentations
June 25: “Antares/Cygnus ISS Launch (July 10) and Suborbital Rocket Launch (June 26) from Virginia” & “Space mission updates”; Rodeway Inn, Chincoteague, VA, evening
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com Story updated[/caption]
Within the past Martian day on Friday, June 6, NASA’s rover Curiosity captured a stunning new panorama of towering Mount Sharp and the treacherous sand dunes below which she must safely traverse before reaching the mountains foothills – while ‘On The Go’ to her primary destination.
See our brand new Mount Sharp photo mosaic above – taken coincidentally by humanity’s emissary on Mars on the 70th anniversary of D-Day on Earth.
Basically she’s eating desiccated dirt while running a Martian marathon.
Having said ‘Goodbye Kimberley’ after drilling her third bore hole deep into a cold red slab of enticing bumpy textures of Martian sandstone in the name of science, our intrepid mega rover Curiosity is trundling along with all deliberate speed towards the inviting slopes of sedimentary rocks at the base of mysterious Mount Sharp which hold clues to the habitability of the Red Planet.
The sedimentary layers of Mount Sharp, which reaches 3.4 miles (5.5 km) into the Martian sky, is the six wheeled robots ultimate destination inside Gale Crater because it holds caches of water altered minerals.
Such minerals could possibly mark locations that sustained potential Martian microbial life forms, past or present, if they ever existed.
Mars was far wetter and warmer – and more conducive to the origin of life – billions of years ago.
Curiosity’s panoramic view departing Mount Remarkable and ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 630, May 15, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
The 1 ton robot is driving on a path towards the Murray Buttes which lies across the dunes on the right side of Mount Sharp as seen in our photo mosaic above, with wheel tracks on the left side.
She will eventually ascend the mountain at the ‘Murray Buttes’ after crossing the sand dunes.
Curiosity still has roughly another 4 kilometers of driving to go to reach the foothills of Mount Sharp sometime later this year.
Approximately four weeks ago, Curiosity successfully completed her 3rd drilling campaign since landing at the science waypoint region called “The Kimberley” on May 5, Sol 621, into the ‘Windjana’ rock target at the base of a 16 foot tall ( 5 Meter) hill called Mount Remarkable.
Composite photo mosaic shows deployment of NASA Curiosity rovers robotic arm and two holes after drilling into ‘Windjana’ sandstone rock on May 5, 2014, Sol 621, at Mount Remarkable as missions third drill target for sample analysis by rover’s chemistry labs. The navcam raw images were stitched together from several Martian days up to Sol 621, May 5, 2014 and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
The fresh hole drilled into “Windjana” was 0.63 inch (1.6 centimeters) in diameter and about 2.6 inches (6.5 centimeters) deep and resulted in a mound of dark grey colored drill tailings piled around. It looked different from the initial holes drilled at Yellowknife Bay in the spring of 2013.
Windjana lies some 2.5 miles (4 kilometers) southwest of Yellowknife Bay.
Curiosity then successfully delivered pulverized and sieved samples to the pair of onboard miniaturized chemistry labs; the Chemistry and Mineralogy instrument (CheMin) and the Sample Analysis at Mars instrument (SAM) – for chemical and compositional analysis.
Before departing, Curiosity blasted the hole multiple times with her million watt laser on the Mast mounted Chemistry and Camera (ChemCam) instrument , leaving no doubt of her capabilities or intentions.
And she completed an up close examination of the texture and composition of ‘Windjana’ with the MAHLI camera and spectrometers at the end of her 7-foot-long (2 meter) arm to glean every last drop of science before moving on.
“Windjana” is named after a gorge in Western Australia.
While ‘On the Go’ to Mount Sharp, the rover is keeping busy with science activities by investigating the newly cored Martian material.
“Inside Curiosity we continue to analyse the Kimberley samples with CheMin and SAM,” wrote mission team member John Bridges in an update.
To date, Curiosity’s odometer totals 3.8 miles (6.1 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 154,000 images.
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Featured on APOD – Astronomy Picture of the Day on May 7, 2014 The Mars Hand Lens Imager on NASA’s Curiosity Mars rover provided this nighttime view of a hole produced by the rover’s drill and, inside the hole, a line of scars produced by the rover’s rock-zapping laser. The hole is 0.63 inch (1.6 centimeters) in diameter. The camera used its own white-light LEDs to illuminate the scene on May 13, 2014. Credit: NASA/JPL-Caltech/MSSS
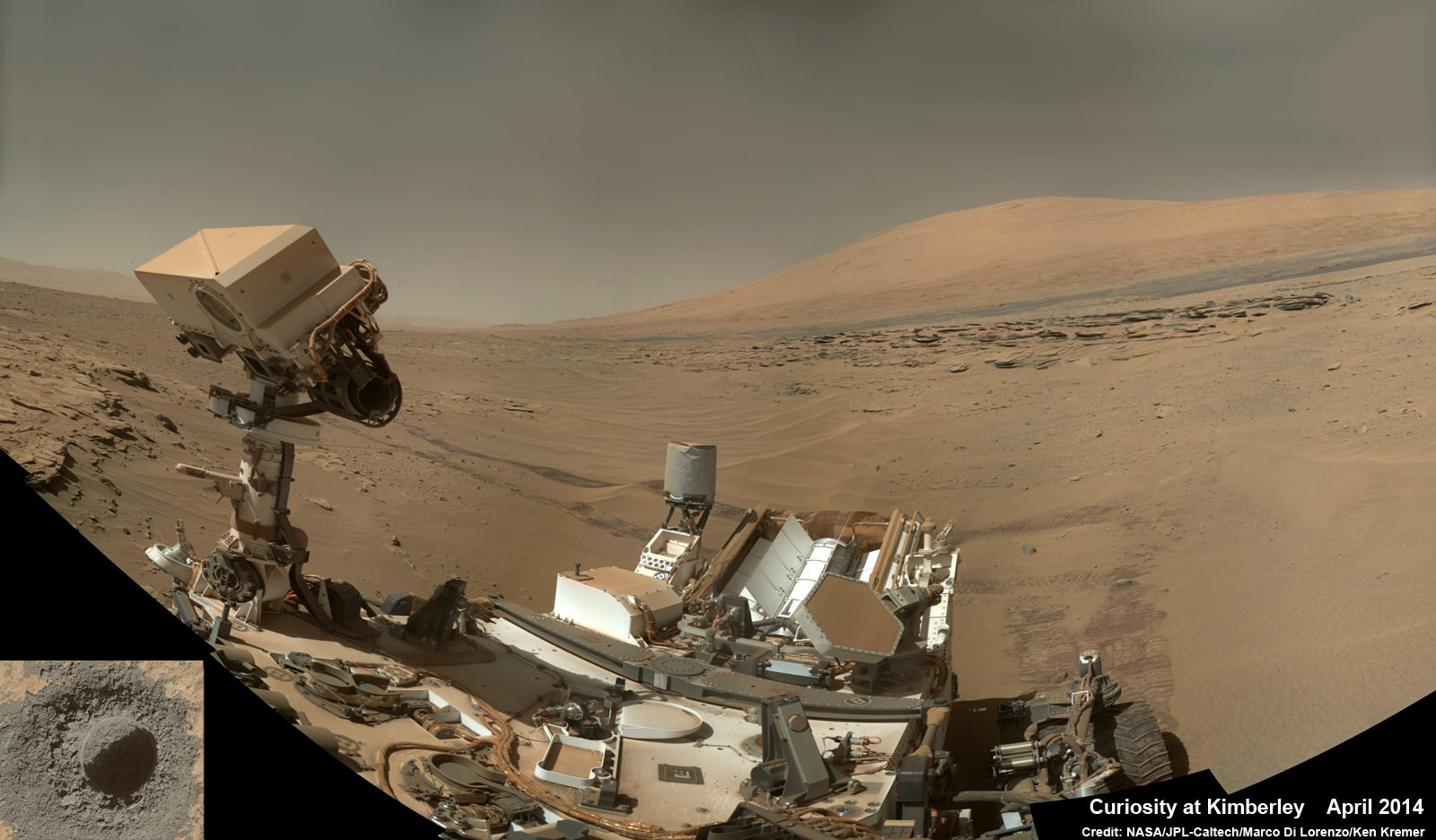
Curiosity snaps selfie at Kimberley waypoint with towering Mount Sharp backdrop on April 27, 2014 (Sol 613). Inset shows MAHLI camera image of rovers mini-drill test operation on April 29, 2014 (Sol 615) into “Windjama” rock target at Mount Remarkable butte. MAHLI color photo mosaic assembled from raw images snapped on Sol 613, April 27, 2014. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer - kenkremer.com
The Curiosity rover looks like she’s concentrating hard on her tasks on Mars, and now you can zoom around and see what it would look like to be standing next to the rover in Gale Crater.
This new interactive image put together by panoramacist Andrew Bodrov from Estonia uses some of the latest imagery from Curiosity’s MAHLI camera, taken on Sol 610 (April 27, 2014 back on Earth) and additional images from the rover’s 34-millimeter Mast Camera to create the full panoramic scene. The mosaic, which stretches about 30,000 pixels width, includes 138 images taken on Sol 610. Bodrov used 138 images and it stretches about 30,000 pixels wide.
You may wonder how the rover took this picture of itself without the camera or the robotic arm showing up in the images. It’s done by combining multiple pictures taken with the MAHLI camera that is mounted at the end of the robotic arm. “Wrist” motions and turret rotations on the arm allowed MAHLI to acquire the images, and the arm was positioned out of the shot in the images or portions of images used in the mosaic.
Curiosity snaps selfie at Kimberley waypoint with towering Mount Sharp backdrop on April 27, 2014 (Sol 613). Inset shows MAHLI camera image of rovers mini-drill test operation on April 29, 2014 (Sol 615) into “Windjama” rock target at Mount Remarkable butte. MAHLI color photo mosaic assembled from raw images snapped on Sol 613, April 27, 2014. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer - kenkremer.com
Curiosity snaps selfie at Kimberley waypoint with towering Mount Sharp backdrop on April 27, 2014 (Sol 613). Inset shows MAHLI camera image of rovers mini-drill test operation on April 29, 2014 (Sol 615) into “Windjana” rock target at Mount Remarkable butte. MAHLI color photo mosaic assembled from raw images snapped on Sol 613, April 27, 2014. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer – kenkremer.com See more Curiosity photo mosaics below[/caption]
The answer has come Fast and Furious – “Drill, Baby, Drill !”
After spending the weekend inspecting an enticing slab of sandstone rock at “Kimberley”, the team directed NASA’s Curiosity rover to bore a test hole into a Martian rock target called “Windjana” on Tuesday, April 29, Sol 615, that exhibited interesting bumpy textures. See above our illustrative “Kimberley” photo mosaic.
“A decision about full drilling is planned in coming days,” NASA JPL press officer Guy Webster told me today.
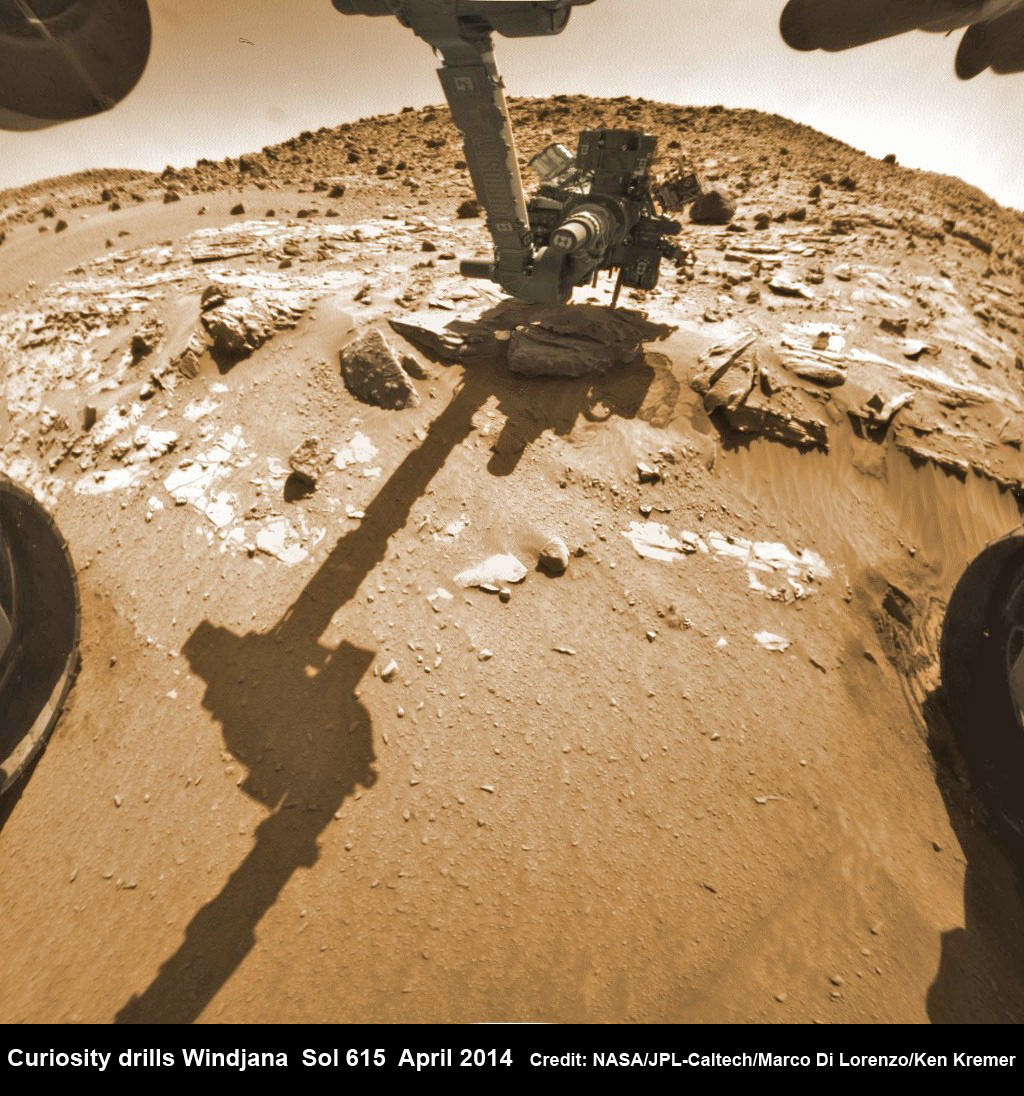
Hazcam fisheye camera image shows Curiosity drilling into “Windjana” rock target on April 29, 2014 (Sol 615). Flattened and colorized image shows Mount Remarkable butte backdrop. Credit: NASA/JPL/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Engineers commanded Curiosity to perform the so called “mini-drill” operation at “Windjana”- as the site of the robots third drilling operation since touching down on the Red Planet back in August 2012.
The 1 ton robot drilled a test hole 0.63 inch (1.6 centimeters) in diameter and to a depth of about 0.8 inch (2 centimeters) using the hammering drill at the terminus of the robotic arm.
Windjana is an outcrop of sandstone located at the base of a Martian butte named Mount Remarkable at “The “Kimberley” waypoint – a science stopping point reached by the rover in early April 2014 along its epic trek to towering Mount Sharp, the primary destination of the mission.
See our photo mosaics illustrating Curiosity’s science activities and drilling operations on “Windjana” and roving around the “Mount Remarkable” butte at “The Kimberley Waypoint” – above and below – by the image processing team of Marco Di Lorenzo and Ken Kremer.
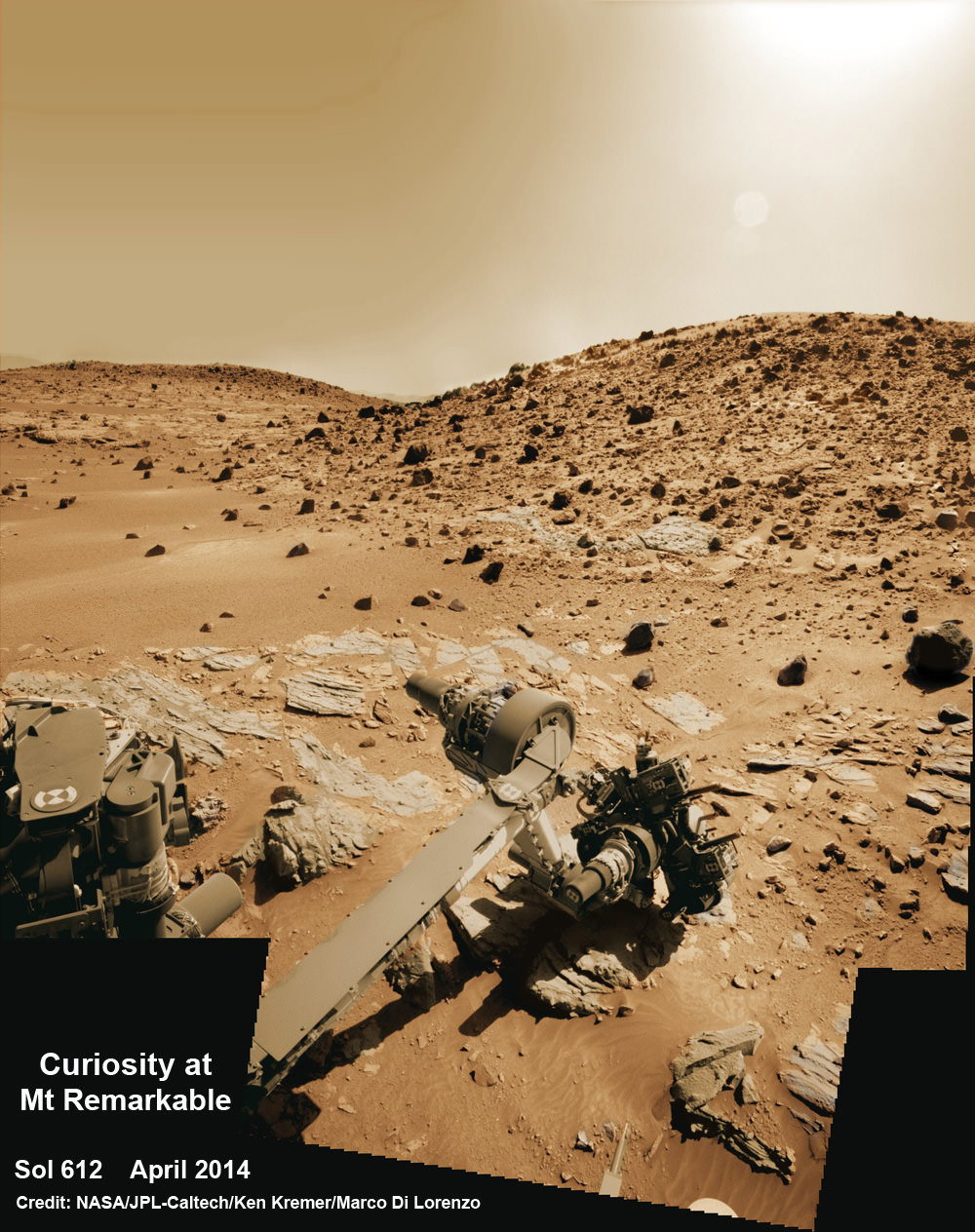
Multisol composite photo mosaic shows deployment of Curiosity’s rovers robotic arm and APXS X-ray spectrometer onto the ‘Winjana’ rock target at Mount Remarkable for evaluation as missions third drill target inside Gale Crater on Mars. The colorized navcam raw images were stitched together from several Martian days up to Sol 612, April 26, 2014. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
The team is evaluating the resulting hole and powdery, gray colored tailings with the arm’s high resolution MAHLI camera and other instruments to determine whether to follow up with a deep drilling operation to a depth of 2.5 inches (6.4 centimeters).
To prepare for the “mini drill” operation, Curiosity first brushed the candidate drill site off with the wire-bristle Dust Removal Tool (DRT) this past weekend, to clear away obscuring Red Planet dirt and dust hindering observations with the cameras and spectrometers.
“In the brushed spot, we can see that the rock is fine-grained, its true color is much grayer than the surface dust, and some portions of the rock are harder than others, creating the interesting bumpy textures,” said Curiosity science team member Melissa Rice of the California Institute of Technology, Pasadena., in a NASA statement
“All of these traits reinforce our interest in drilling here in order understand the chemistry of the fluids that bound these grains together to form the rock.”
“Windjana,” is named after a gorge in Western Australia.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover will conduct 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Why was Kimberley chosen as a science destination ?
“The Kimberley” has interesting, complex stratigraphy,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology, Pasadena, told me.
If the team decides that Windjana meets the required criteria, Curiosity will bore a full depth hole into the sandstone rock, and then pulverize and filter it prior to delivery to the two onboard miniaturized chemistry labs – SAM and CheMin.
Windjana would be the first sandstone drill target, if selected. The first two drill locations at ‘John Klein’ and ‘Cumberland’ inside Yellowknife Bay were mudstone.
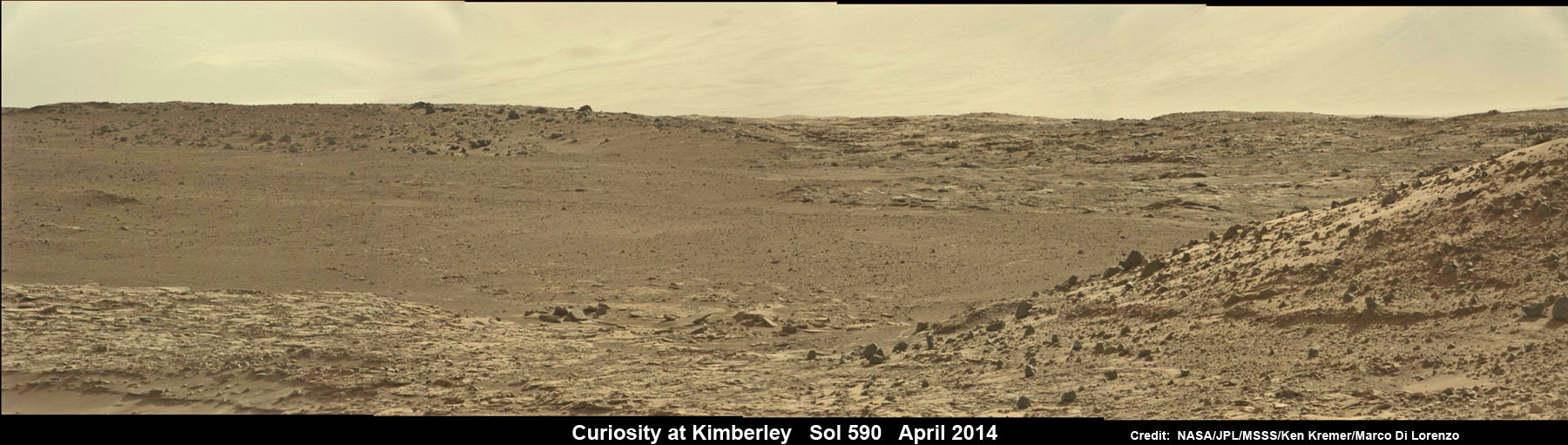
Curiosity departed the ancient lakebed at the Yellowknife Bay region in July 2013 where she discovered a habitable zone with the key chemical elements and a chemical energy source that could have supported microbial life billions of years ago – and thereby accomplished the primary goal of the mission. Curiosity scans scientifically intriguing rock outcrops of gorgeous Martian terrain at ‘The Kimberley’ waypoint in search of next drilling location beside Mount Remarkable butte, at right. Mastcam color photo mosaic assembled from raw images snapped on Sol 590, April 4, 2014. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Chang’e-3, SpaceX, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Ken Kremer Curiosity Mars rover captured this panoramic view of a butte called “Mount Remarkable” and surrounding outcrops at “The Kimberley ” waypoint on April 11, 2014, Sol 597. Colorized navcam photomosaic was stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
A recent image taken by the HiRISE camera on the Mars Reconnaissance Orbiter of the Curiosity rover in "The Kimberly" area in Gale Crater on Mars. Credit: NASA/JPL/University of Arizona
First of all, I completely stole this headline from NASA engineer Bobak Ferdowski (AKA The Mohawk Guy) on Twitter. Second, this is just a great image of the Curiosity rover sitting on Mars, including views of its tracks and where it did a wheelie or two. Plus, where the rover now sits is a very intriguing region called “The Kimberly.” Curiosity will soon whip out its drill to see if it can find hints of organic material, which could be a biomarker — the holy grail of Mars exploration.
Find out why this is such an intriguing region in this video:
Curiosity maneuvers into ‘Kimbeley’ and scans scientifically intriguing Martian rock outcrops in search of next drilling location exhibiting several shallow hills in foreground and dramatic Gale crater rim backdrop. Rover tracks at right in this colorized Navcam photomosaic assembled from raw images snapped on Sol 589, April 3, 2014. Credit: NASA/JPL/Marco Di Lorenzo /Ken Kremer - kenkremer.com
Curiosity maneuvers into ‘Kimbeley’ and scans scientifically intriguing Martian rock outcrops in search of next drilling location exhibiting several shallow hills in foreground and dramatic Gale crater rim backdrop. Rover tracks at right in this colorized Navcam photomosaic assembled from raw images snapped on Sol 589, April 3, 2014.
Credit: NASA/JPL/Marco Di Lorenzo /Ken Kremer – kenkremer.com[/caption]
NASA’s car sized Curiosity rover has arrived at a scientifically enticing science destination at “The Kimberley Waypoint” where researchers hope to carry out the next drilling operation into alien Martian terrain in search of further clues about ancient Red Planet environments that may have been favorable for life.
“We are officially in ‘The Kimberley’ now,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology, Pasadena, told Universe Today.
Since arriving in the Kimberley region, Curiosity’s earth-bound handlers have been maneuvering the 1 ton robot to thoroughly survey the destination dubbed “The Kimberley”.
Why was Kimberley chosen as a science destination?
“The Kimberley” has interesting, complex stratigraphy,” Grotzinger told me.
The team moved the six wheeled robot further this week in search of a suitable location to conduct the next drilling operation. The terrain is replete with diverse rock types and extensive outcrops.
I asked Grotzinger if today’s (April 5) location at ‘The Kimberley’ is the intended drill site?
“It’s a possible drill site,” Grotzinger replied.
“Pending further evaluation,” he noted.
Curiosity scans scientifically intriguing rock outcrops of Martian terrain at ‘The Kimberley’ waypoint in search of next drilling location, beside low hill at right. Mastcam color photomosaic assembled from raw images snapped on Sol 590, April 4, 2014. Credit: NASA/JPL/MSSS/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Curiosity drove the final stretch of some 98 feet (30 meters) on Wednesday, April 2, required to arrive at a major stopping waypoint planned since early 2013 for up close study of the Red Planet’s rocks.
Along the recent dune filled path to ‘The Kimberley’, Curiosity snapped breathtaking landscapes around the irresistible ‘Junda’ outcrop, much like a tourist.
See our photomosaics showing the spectacularly inviting terrain around Kimberly and Junda, above and below, by Marco Di Lorenzo and Ken Kremer.
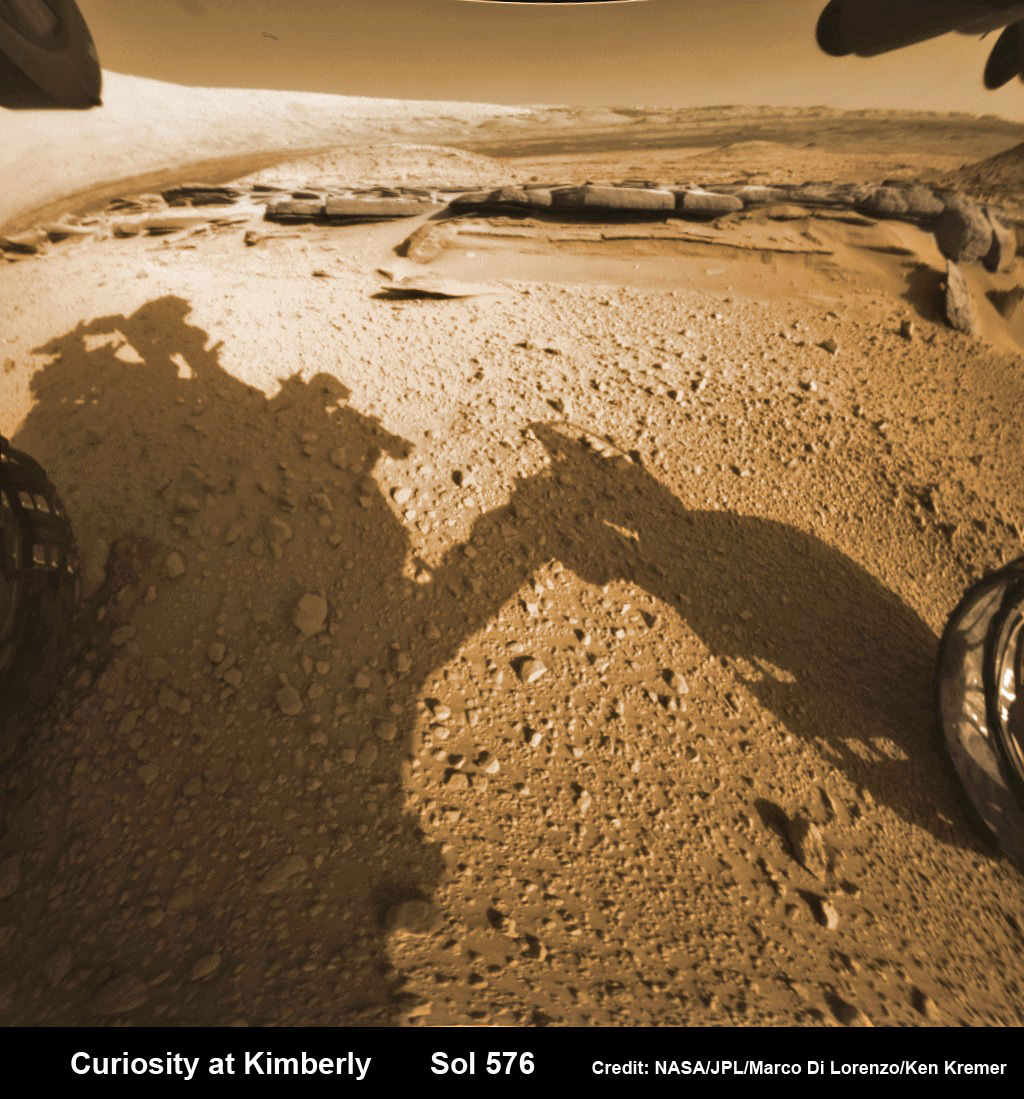
Martian landscape with rows of curved rock outcrops at ‘Kimberly’ in the foreground and spectacular Mount Sharp on the horizon. NASA’s Curiosity Mars rover pulled into Kimberly waypoint dominated by layered rock outcrops as likely drilling site. This colorized navcam camera photomosaic was assembled from imagery taken on Sol 576 (Mar. 20, 2014). Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
The state-of-the-art robot now sits at a vantage point at “The Kimberley” enabling a detailed photographic survey of the rock exposures and surroundings with the high resolution Mastcam cameras.
The new imagery will be used to select the most scientifically productive drilling locations.
“It is named after a remote region of western Australia,” Grotzinger informed me.
The team chose Kimberley because its lies at the intersection of four different types of rocks, including striated rocks overlain by others and deposited in a decipherable geological relationship to each other.
Researchers directed Curiosity on a pinpoint drive to ‘Kimberley’ after high resolution imagery and mineral mapping spectrometry gathered by NASA’s powerful telescopic cameras aboard the Mars Reconnaissance Orbiter (MRO) circling overhead piqued their interest.
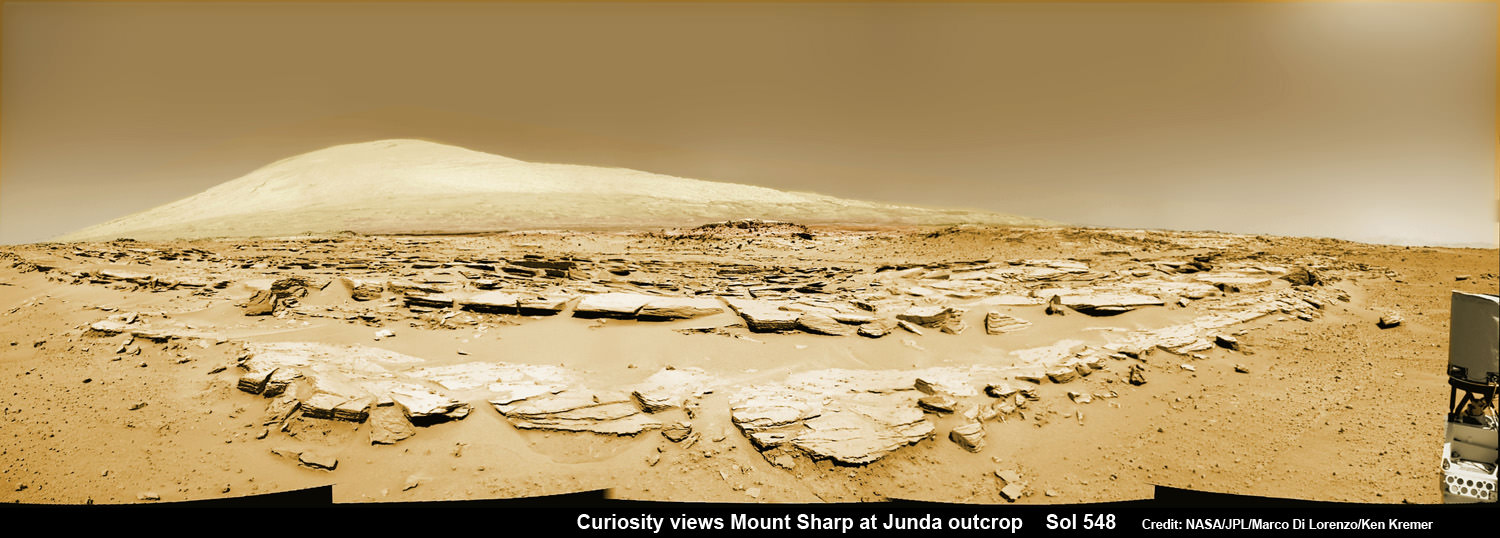
Curiosity looks back at Martian sand dunes and rover tracks after passing by Junda outcrop (right) on Sol 548 (Feb. 19, 2014) with Gale Crater rim and Mount Sharp on the distant horizon. Navcam colorized photomosaic. Credit: NASA/JPL-Caltech/Ken Kremer- kenkremer.com/Marco Di Lorenzo
“This is the spot on the map we’ve been headed for, on a little rise that gives us a great view for context imaging of the outcrops at the Kimberley,” said Melissa Rice, Curiosity science planning lead, of Caltech.
The team expects Curiosity to investigate Kimberley for several weeks of observations, including sample-drilling and onboard laboratory analysis of the area’s rocks with the CheMin and SAM miniaturized chemistry labs.
If drilling is warranted, Kimberley would be the site of Curiosity’s first drilling operation since boring into the ‘John Klein’ and ‘Cumberland’ outcrop targets during the spring of 2013 at Yellowknife Bay.
The robot has conducted cleaning activities of SAM, CheMin and the CHIMRA sample handling mechanism in anticipation of boring into the Martian outcrops and delivering powdery, pulverized samples of cored Martian rocks to SAM and CheMin – waiting patiently inside the robots belly to eat something exciting from the Red Planet.
Curiosity departed the Yellowknife Bay region in July 2013 where she discovered a habitable zone and thereby accomplished the primary goal of the mission.
To date, Curiosity’s odometer totals 3.8 miles (6.1 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 137,000 images.
The sedimentary foothills of Mount Sharp, which reaches 3.4 miles (5.5 km) into the Martian sky, is the 1 ton robots ultimate destination inside Gale Crater because it holds caches of water altered minerals. Such minerals could possibly indicate locations that sustained potential Martian life forms, past or present, if they ever existed.
Curiosity has some 4 kilometers to go to reach the base of Mount Sharp.
She may arrive at the lower reaches of Mount Sharp sometime in the latter half of 2014, but must first pass through a potentially treacherous dune field.
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Chang’e-3, SpaceX, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Learn more at Ken’s upcoming presentations at the NEAF convention on April 12/13 and at Washington Crossing State Park, NJ on April 6.
Map of Curiosity Mars Rover’s Drives to ‘the Kimberley’ Waypoint. This map shows the route driven by NASA’s Curiosity Mars rover during March and April 2014 in its approach to and arrival at a waypoint called “the Kimberley,” which rover team scientists chose in 2013 as the location for the mission’s next major investigations. Credit: NASA/JPL-Caltech/Univ. of Arizona
Martian landscape with rows of curved rock outcrops at ‘Kimberly’ in the foreground and spectacular Mount Sharp on the horizon. NASA’s Curiosity Mars rover pulled into Kimberly waypoint dominated by layered rock outcrops as likely drilling site. This colorized navcam camera photomosaic was assembled from imagery taken on Sol 576 (Mar. 20, 2014). Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
Martian landscape with rows of curved rock outcrops at ‘Kimberley’ in the foreground and spectacular Mount Sharp on the horizon. NASA’s Curiosity Mars rover pulled into Kimberly waypoint dominated by layered rock outcrops as likely drilling site. This colorized navcam camera photomosaic was assembled from imagery taken on Sol 576 (Mar. 20, 2014).
Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
See additional Curiosity Mars photomosaics below[/caption]
KENNEDY SPACE CENTER, FL – NASA’s Curiosity rover has just pulled into gorgeous terrain chock full of curvy rock outcrops at Kimberley that’s suitable for contact science and drilling action, according to the mission team.
The six wheeled Martian dune buggy drove into the dazzling Kimberley waypoint this week after traversing a swath of otherworldly dune fields since passing through a gateway known as the ‘Dingo Gap’ sand dune some six weeks ago.
The robot’s arm has been deployed to investigate the most scientifically productive spots to touch Kimberley’s textured outcrops for detailed scrutiny.
The science team has been hunting for tasty rock outcrops suitable for the first drilling campaign since she departed the dried out lakebed at Yellowknife Bay in July 2013 and began her epic trek across the floor of Gale Crater towards the base of Mount Sharp.
With each passing Sol, or Martian day, Mount Sharp looms larger and larger and the historical layers with deposits of hydrated minerals potentially indicative of an alien habitable zone come ever clearer into focus.
About a month ago on Feb. 19 (Sol 548), Curiosity couldn’t resist the urge to pause mid dune drive, just like a tourist, and snap fabulous imagery of multiple rows of striated rocks at the Junda outcrop – see our mosaics below.
Junda appeared remarkably similar to Kimberley, about 1 kilometer back.
Curiosity looks back at Martian sand dunes and rover tracks after passing by Junda outcrop (right) on Sol 548 (Feb. 19, 2014) with Gale Crater rim and Mount Sharp on the distant horizon. Navcam colorized photomosaic. Credit: NASA/JPL-Caltech/Ken Kremer- kenkremer.com/Marco Di Lorenzo
So after executing a final series of short bumps edging ever closer to the outcrops this week, Curiosity parked at the periphery of Kimberley on Thursday, March 20, Sol 576, and captured breathtaking imagery of the rocky rows dominated by towering Mount Sharp on the distant horizon.
See our photomosaics showing the spectacularly inviting terrain around Kimberley and Junda – above and below by Marco Di Lorenzo and Ken Kremer.
“The images [at Kimberley] show nice outcrops in front of the rover, suitable for contact science,” according to science team member Ken Herkenhoff in a mission update.
NASA’s Curiosity Mars rover will likely drill into this layered rock outcrop, near the center of the mosaic, at the Kimberly waypoint. This photomosaic was assembled from high resolution Mastcam 34 camera images taken on Sol 574 (March 18, 2014). Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
This weekend, the state of the art robot is conducting contact science with the cameras and spectrometers on the terminus of the 7 foot long robotic arm and the mast mounted ChemCam laser and high resolution cameras to determine the best spot for drilling and sampling.
The team commanded Curiosity to clean out the arms CHIMRA sample handling mechanism in anticipation of boring into the Martian outcrops and delivering powdery, pulverized samples of cored Martian rocks to the SAM and CheMin miniaturized chemistry labs waiting patiently inside the robots belly to eat something exciting from the Red Planet.
“The arm will be deployed to “thwack” and vibrate CHIMRA to clean out any remnants of the “John Klein” [drilling] sample, followed by Mastcam and RMI imaging of the CHIMRA sieve,” says Herkenhoff.
Scientists directed Curiosity on a pinpoint drive to Kimberly after their interest was piqued by orbital images taken by the powerful telescopic camera on NASA’s Mars Reconnaissance Orbiter (MRO) circling overhead.
“At Kimberly, we see three terrain types exposed and a relatively dust-free surface,” said science team collaborator Katie Stack of the California Institute of Technology, Pasadena.
Flattened fisheye hazcam camera view of Kimberly rock outcrop and Mount Sharp backdrop, taken on Sol 576 (Mar. 20, 2014) and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
The missions science focus has shifted to “search for that subset of habitable environments which also preserves organic carbon,” says Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology in Pasadena.
Organic molecules are the building blocks of life as we know it.
The sedimentary foothills of Mount Sharp, which reaches 3.4 miles (5.5 km) into the Martian sky, is the 1 ton robots ultimate destination inside Gale Crater because it holds caches of water altered minerals. Such minerals could possibly indicate locations that sustained potential Martian life forms, past or present, if they ever existed.
Curiosity discovered a habitable zone at Yellowknife via two drilling operations at the John Klein and Cumberland outcrops and thereby accomplished the primary goal of the mission.
Mars rock rows and Mount Sharp. Martian landscape scene with rows of striated rocks in the foreground and Mount Sharp on the horizon. NASA’s Curiosity Mars rover paused mid drive at the Junda outcrop to snap the component images for this navcam camera photomosaic on Sol 548 (Feb. 19, 2014) and then continued traveling southwards towards mountain base. UHF Antenna at right. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
To date Curiosity’s odometer stands at 6.2 kilometers. She has taken over 132,000 images.
The robot has somewhat over another 4 kilometers to go to reach the base of Mount Sharp.
She may arrive at the lower reaches of Mount Sharp sometime in mid 2014, but must first pass through a potentially treacherous dune field.
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Chang’e-3, SpaceX, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Learn more at Ken’s upcoming presentations at the NEAF convention on April 12/13 and at Washington Crossing State Park, NJ on April 6. Also evenings at the Quality Inn Kennedy Space Center, Titusville, FL, March 24/25 and March 29/30.