It has been suggested that if humanity wants to truly embark on a renewed era of space exploration, one of the key ingredients is the ability to manufacture structures in space. By assembling everything from satellites to spacecraft in orbit, we would eliminate the most costly aspect of going to space. This, simply put, is the sheer expense of escaping Earth’s gravity well, which requires heavy launch vehicles and LOTS of fuel!
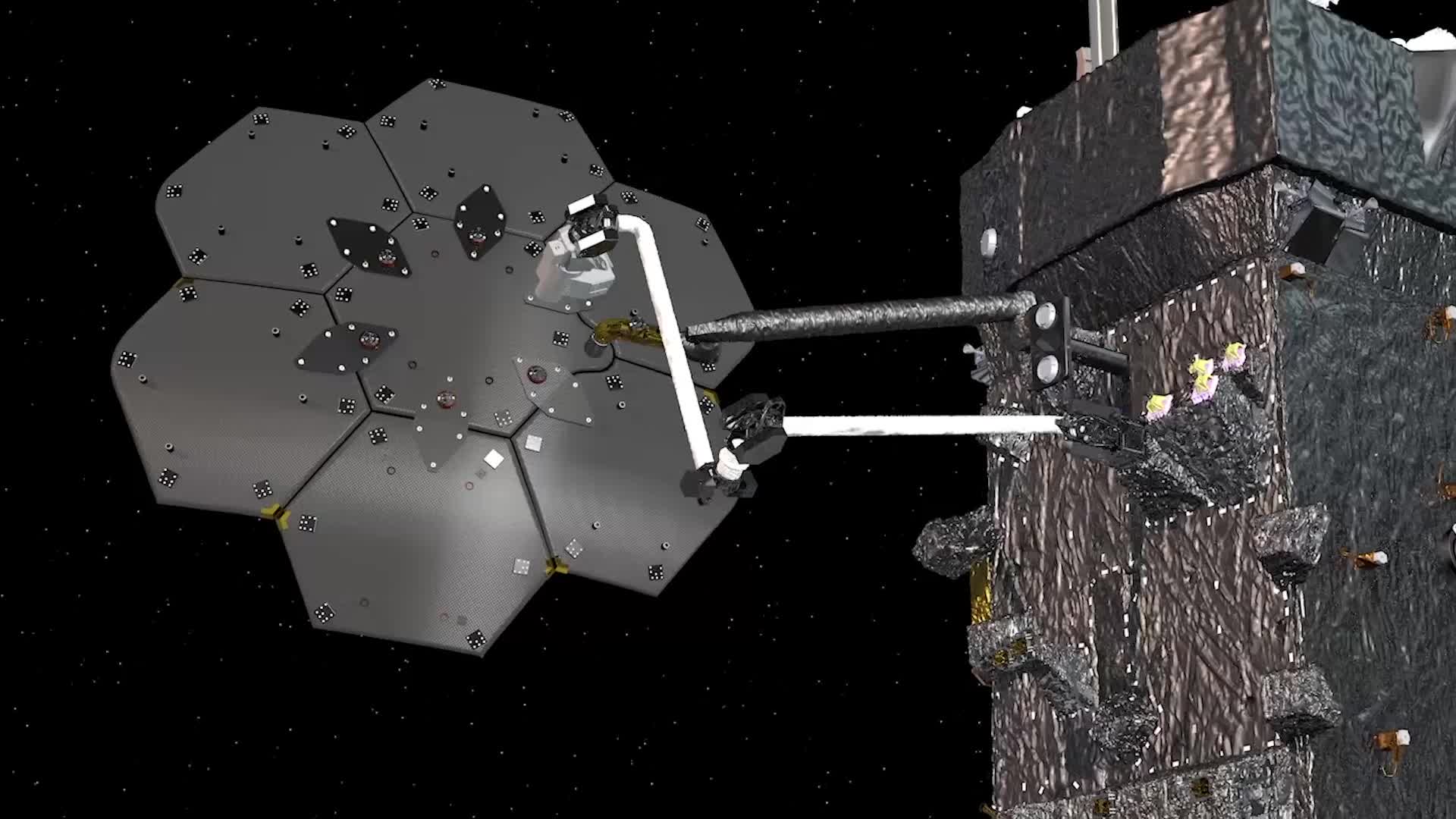
This is the idea behind the Space Infrastructure Dexterous Robot (SPIDER), a technology-demonstrator that will be going to space as part of NASA’s Restore-L spacecraft, which is designed to service and refuel a satellite in low-Earth orbit. Once deployed, the SPIDER will assemble a communications antenna and composite beam to demonstrate that space-based construction is possible.
Read more