Building with Legos is a favored pastime for many small children and adults. We've even covered some more space-oriented Lego sets here at UT. But, as the Lego movie points out, they constitute "a highly sophisticated interlocking brick system." So why not take the idea underpinning Legos - that you can make anything you want out of a set of generic pieces and apply it to a much more serious scientific topic…like robots.
That is precisely what a student-led team from MIT has done with the Walking Oligometric Robotic Mobility Systems (WORMS) robot they have developed. Conceived initially as a project in response to NASA's Breakthrough, Innovative, and Game-changing (BIG) idea challenge, the system is designed to have replaceable parts to achieve various mobility tasks over rugged terrain.
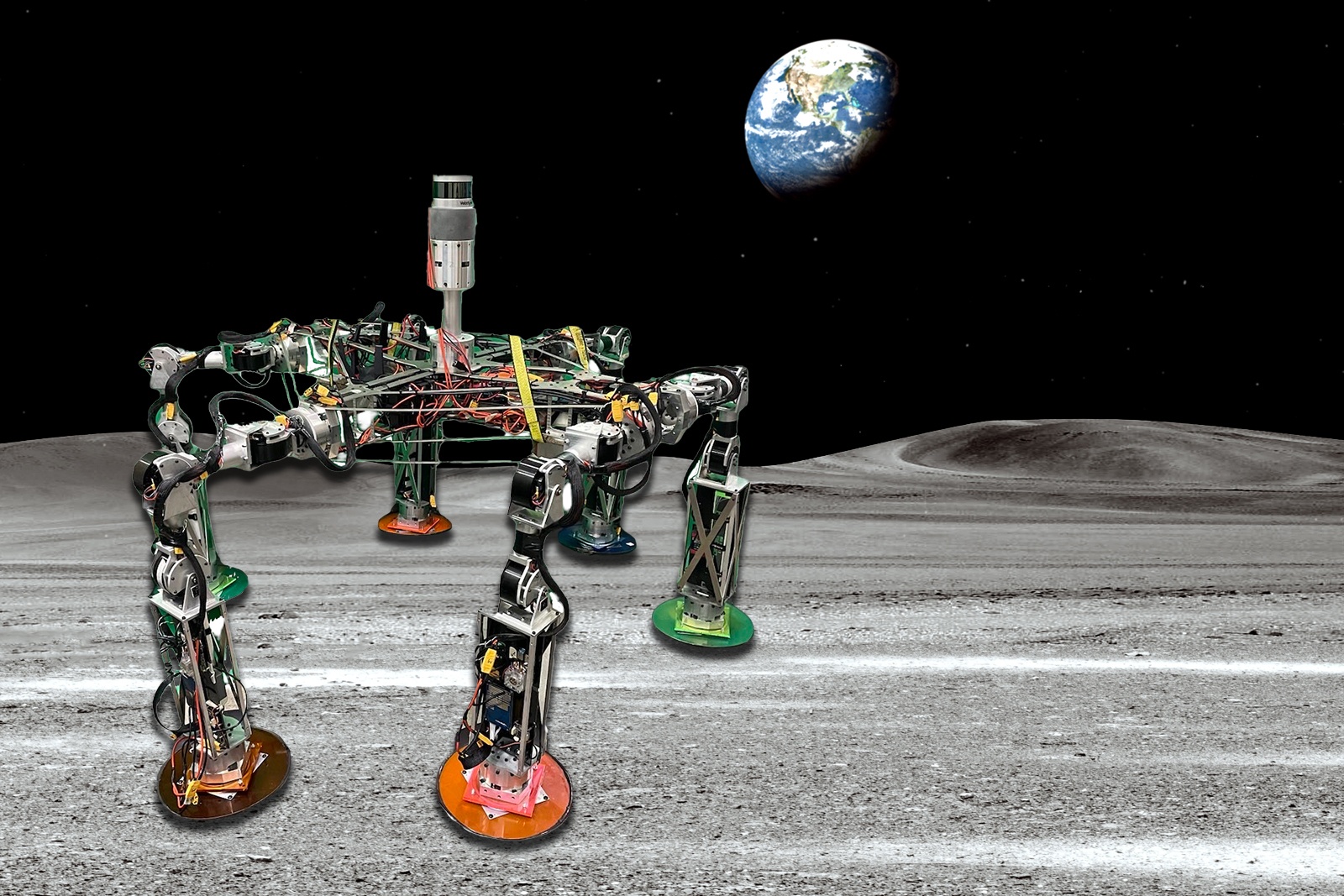
Part of its appeal is its lack of wheels. Despite its name, WORMS looks more like a spider, at least in the configuration that has been the most thoroughly tested. The design team, based out of the Space Resources Workshop, took biological inspiration from several different creatures, including spiders, elephants, and oxen. Each could be used for a specific task - spiders could explore caves, elephants could join together to transport heavy objects, and oxen could drag other equipment up or down steep slopes.
At the heart of the system is a core that could easily snap different parts onto it. If a spider bot is needed to explore a lava tube, six legs could be snapped on, along with a drill to dig for liquid water. Suppose the astronauts programming the robots needed to get a solar panel up to the top of a ridgeline to collect more sunlight. In that case, they could configure the robot with many more legs and even multiple central cores, allowing the WORMS system to expand its payload capacity linearly.
In place of wheels, the WORMS team uses articulated appendages measuring about 1 meter in length and with a part that looks somewhat like Captain America's shield in place of a foot. However, like much of the rest of the system, those parts can be replaced with differing parts for different use cases. Many could be 3D printed on the Moon itself using one of the various lunar 3D printing technologies we discussed in past articles.
For now, the WORMS remains Earthbound but is still under active development. A paper from the group recently won the Best Paper award at the Institute for Electrical Engineers' Aerospace Conference. With continued support and a never-ending stream of MIT students interested in continuing development on the project, what started as a student-led project could morph into a fully fleshed-out robotic support system for the Moon's first long-term inhabitants.
UT video on lunar lava tubes, where WORMS or other robotic explorers could potentially be the first to tread.Learn More:
MIT - Mix-and-match kit could enable astronauts to build a menagerie of lunar exploration bots
UT - Robots Might Jump Around to Explore the Moon
UT - The Surface of the Moon is Electrically Charged, Which Could Allow a Hovering Robot to Explore it
UT - Lunar Rovers! Transform and Roll Out!
Lead Image:
Artist graphic of a hexapod WORMS robot.
Credit - MIT News / Lordos et al.