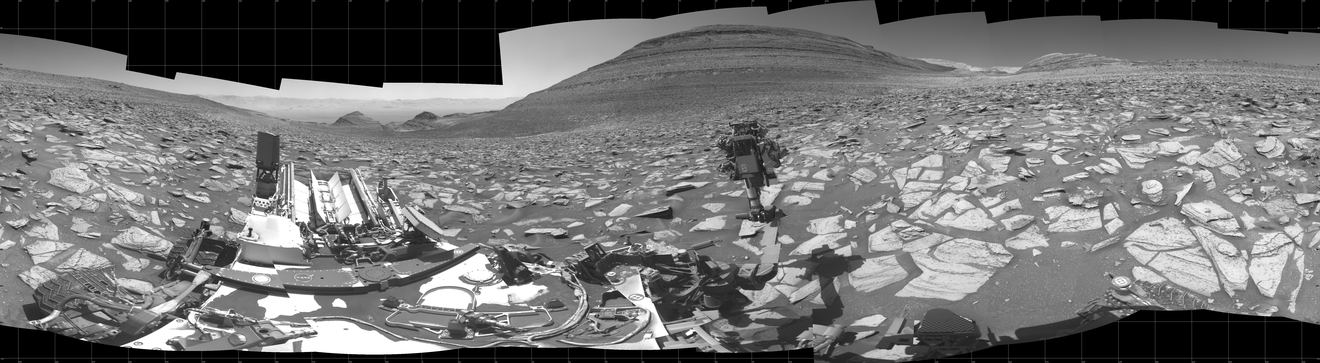
NASA’s Curiosity Mars rover captured this 360-degree panorama using its black-and-white navigation cameras, or Navcams, at a location where it collected a sample from a rock nicknamed “Sequoia.” The panorama was captured on Oct. 21 and 26, 2023. Credit: NASA/JPL-Caltech
Not to make anyone feel old, but it’s been over 11 years since NASA’s Curiosity Rover landed on Mars. The rover has now seen the sun rise on Mars over 4,000 times. During this time, the rover has driven almost 32 kilometers on Mars, making its way up the flanks of Mount Sharp while studying the ancient history of water on Mars.
The past 11 years have been quite the journey, but it hasn’t been all perfect. There have been a few computer glitches over the years, Curiosity’s wheels have gaping holes and gashes from driving over sharp rocks, and recently one of its camera filter wheels became stuck. But since the rover’s nominal mission was designed to last about two Earth years, Curiosity has proven to be a tough and enduring machine.
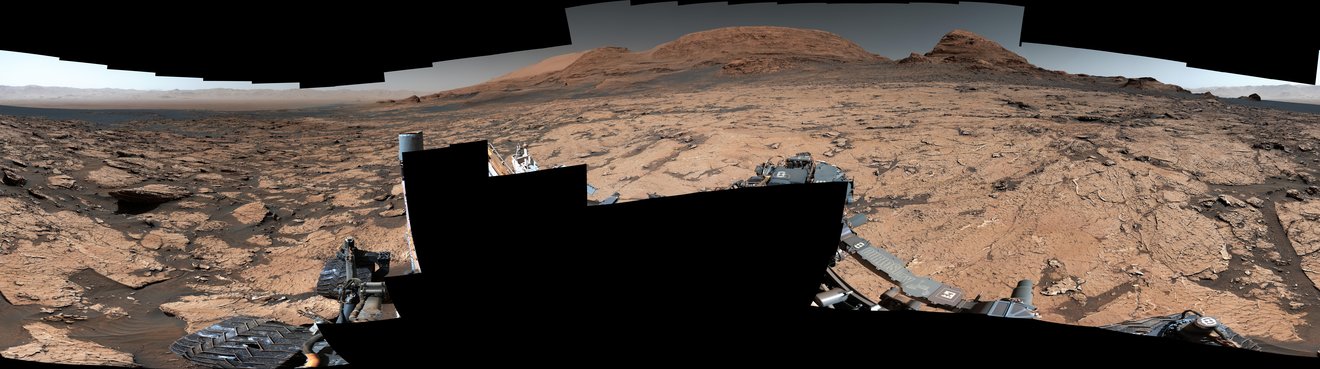
A panorama image taken by NASA’s Curiosity Mars rover shows a rock target nicknamed “Pontours” where researchers identified preserved, ancient mud cracks hypothesized to have shaped throughout lengthy cycles of wet and dry environments over many years. These cycles are hypothesized to support conditions where life could form. (Credit: NASA/JPL-Caltech/MSSS/IRAP)
A recent study published in Nature examines how mud cracks observed on Mars by NASA’s Curiosity rover could provide insight into how life on the Red Planet could have formed in its ancient past. On Earth, mud cracks have traditionally been linked to cycles of wet and dry environments that assisted in developing the complex processes responsible for microbial life to take hold. This study was conducted by an international team of researchers and holds the potential to help scientists better understand the geological and chemical processes that might have existed in Mars’ ancient past, up to billions of years ago.
Curiosity rover obtained this 'Hand Lens' extreme close-up of one of the very small and rather unusual concretion features. This one has been called 'Blackthorn Salt'. Credit: NASA/JPL-Caltech/MSSS/Kevin M. Gill
The Curiosity rover took a picture of something pretty enticing this week on the surface of Mars. While the object in question looks like a tiny little flower or maybe even some type of organic feature, the rover team confirmed this object is a mineral formation, with delicate structures that formed by mineral precipitating from water. The size of this tiny object is just 1 centimeter.
An atmospheric drama has been playing out on Mars lately. Up until now, the main actor has been methane, and its unusual, spiking behaviour. But now Oxygen is taking the stage, and performing some theatrics of its own.
Curiosity at Mt. Sharp, Gale Crater, Mars. To the left of the rover are two drill holes into the rocks "Aberlady" and "Kilmarie." Curiosity found high concentrations of clay in both rocks. Image Credit: NASA/JPL-Caltech/MSSS
Clay is a big deal on Mars because it often forms in contact with water. Find clay, and you’ve usually found evidence of water. And the nature, history, and current water budget on Mars are all important to understanding that planet, and if it ever supported life.
NASA’s Curiosity rover raised robotic arm with drill pointed skyward while exploring Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater - backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images taken on Sol 1833, Oct. 2, 2017 and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover raised robotic arm with drill pointed skyward while exploring Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater – backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images taken on Sol 1833, Oct. 2, 2017 and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
5 years after a heart throbbing Martian touchdown, Curiosity is climbing Vera Rubin Ridge in search of “aqueous minerals” and “clays” for clues to possible past life while capturing “truly breathtaking” vistas of humongous Mount Sharp – her primary destination – and the stark eroded rim of the Gale Crater landing zone from ever higher elevations, NASA scientists tell Universe Today in a new mission update.
“Curiosity is doing well, over five years into the mission,” Michael Meyer, NASA Lead Scientist, Mars Exploration Program, NASA Headquarters told Universe Today in an interview.
“A key finding is the discovery of an extended period of habitability on ancient Mars.”
The car-sized rover soft landed on Mars inside Gale Crater on August 6, 2012 using the ingenious and never before tried “sky crane” system.
A rare glimpse of Curiosity’s arm and turret mounted skyward pointing drill is illustrated with our lead mosaic from Sol 1833 of the robot’s life on Mars – showing a panoramic view around the alien terrain from her current location in October 2017 while actively at work analyzing soil samples.
“Your mosaic is absolutely gorgeous!’ Jim Green, NASA Director Planetary Science Division, NASA Headquarters, Washington D.C., told Universe Today
“We are at such a height on Mt Sharp to see the rim of Gale Crater and the top of the mountain. Truly breathtaking.”
The rover has ascended more than 300 meters in elevation over the past 5 years of exploration and discovery from the crater floor to the mountain ridge. She is driving to the top of Vera Rubin Ridge at this moment and always on the lookout for research worthy targets of opportunity.
Additionally, the Sol 1833 Vera Rubin Ridge mosaic, stitched by the imaging team of Ken Kremer and Marco Di Lorenzo, shows portions of the trek ahead to the priceless scientific bounty of aqueous mineral signatures detected by spectrometers years earlier from orbit by NASA’s fleet of Red Planet orbiters.
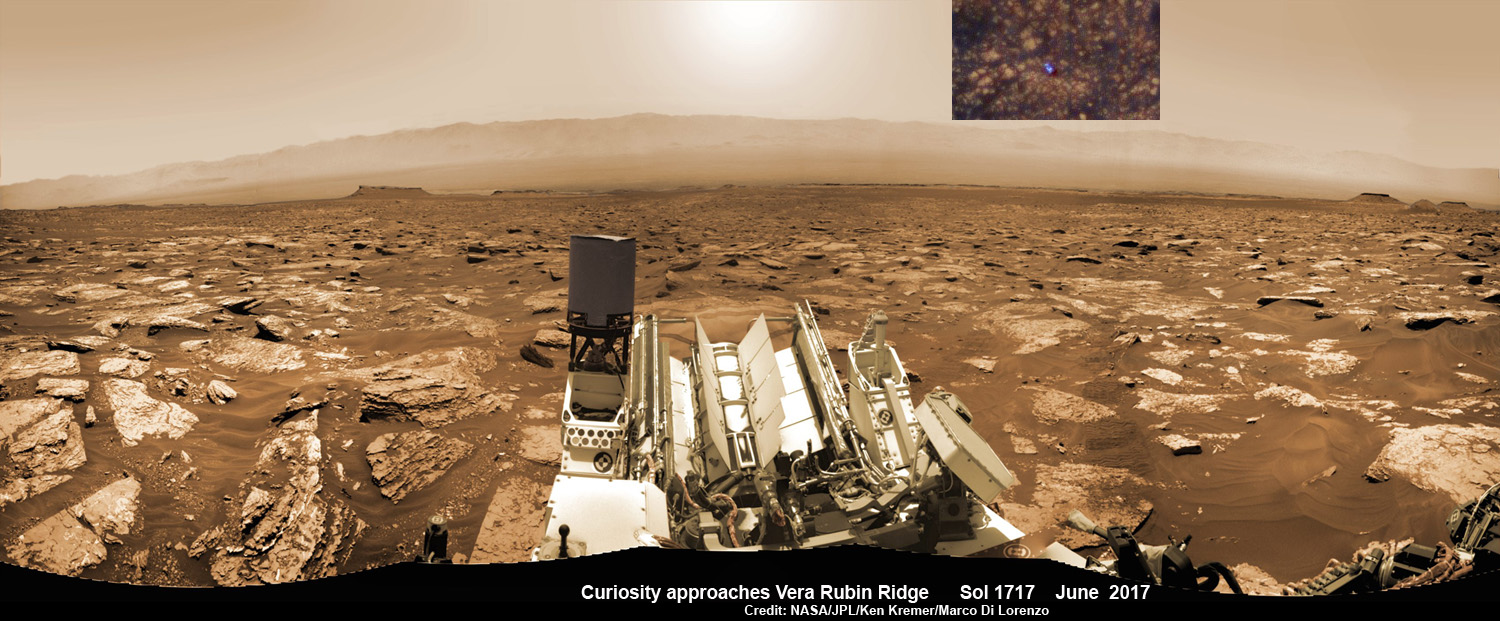
NASA’s Curiosity rover as seen simultaneously on Mars surface and from orbit on Sol 1717, June 5, 2017. The robot snapped this self portrait mosaic view while approaching Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater – backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images and colorized. Inset shows overhead orbital view of Curiosity (blue feature) amid rocky mountainside terrain taken the same day by NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“Curiosity is on Vera Rubin Ridge (aka Hematite Ridge) – it is the first aqueous mineral signature that we have seen from space, a driver for selecting Gale Crater,” NASA HQ Mars Lead Scientist Meyer elaborated.
“And now we have access to it.”
The Sol 1833 photomosaic illustrates Curiosity maneuvering her 7 foot long (2 meter) robotic arm during a period when she was processing and delivering a sample of the “Ogunquit Beach” for drop off to the inlet of the CheMin instrument earlier in October. The “Ogunquit Beach” sample is dune material that was collected at Bagnold Dune II this past spring.
The sample drop is significant because the drill has not been operational for some time.
“Ogunquit Beach” sediment materials were successfully delivered to the CheMin and SAM instruments over the following sols and multiple analyses are in progress.
To date three CheMin integrations of “Ogunquit Beach” have been completed. Each one brings the mineralogy into sharper focus.
Researchers used the Mastcam on NASA’s Curiosity Mars rover to gain this detailed view of layers in “Vera Rubin Ridge” from just below the ridge. The scene combines 70 images taken with the Mastcam’s right-eye, telephoto-lens camera, on Aug. 13, 2017. Credit: NASA/JPL-Caltech/MSSS
What’s the status of the rover health at 5 years, the wheels and the drill?
“All the instruments are doing great and the wheels are holding up,” Meyer explained.
“When 3 grousers break, 60% life has been used – this has not happened yet and they are being periodically monitored. The one exception is the drill feed (see detailed update below).”
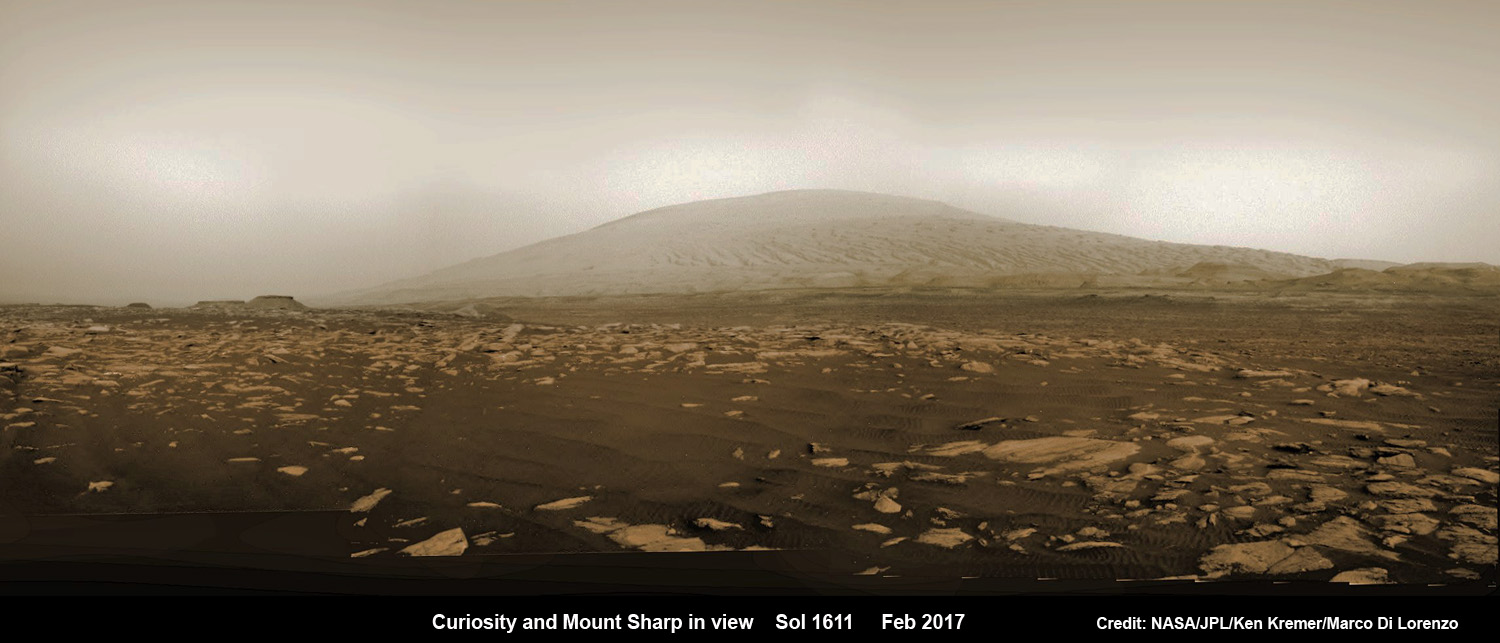
NASA’s Curiosity rover explores sand dunes inside Gale Crater with Mount Sharp in view on Mars on Sol 1611, Feb. 16, 2017, in this navcam camera mosaic, stitched from raw images and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s 1 ton Curiosity Mars Science Laboratory (MSL) rover is now closer than ever to the mineral signatures that were the key reason why Mount Sharp was chosen as the robots landing site years ago by the scientists leading the unprecedented mission.
Along the way from the ‘Bradbury Landing’ zone to Mount Sharp, six wheeled Curiosity has often been climbing. To date she has gained over 313 meters (1027 feet) in elevation – from minus 4490 meters to minus 4177 meters today, Oct. 19, 2017, said Meyer.
The low point was inside Yellowknife Bay at approx. minus 4521 meters.
VRR alone stands about 20 stories tall and gains Curiosity approx. 65 meters (213 feet) of elevation to the top of the ridge. Overall the VRR traverse is estimated by NASA to take drives totaling more than a third of a mile (570 m).
Curiosity images Vera Rubin Ridge during approach backdropped by Mount Sharp. This navcam camera mosaic was stitched from raw images taken on Sol 1726, June 14, 2017 and colorized. Credit: NASA/JPL/Marco Di Lorenzo/Ken Kremer/kenkremer.com
“Vera Rubin Ridge” or VRR is also called “Hematite Ridge.” It’s a narrow and winding ridge located on the northwestern flank of Mount Sharp. It was informally named earlier this year in honor of pioneering astrophysicist Vera Rubin.
The intrepid robot reached the base of the ridge in early September.
The ridge possesses steep cliffs exposing stratifications of large vertical sedimentary rock layers and fracture filling mineral deposits, including the iron-oxide mineral hematite, with extensive bright veins.
VRR resists erosion better than the less-steep portions of the mountain below and above it, say mission scientists.
Curiosity rover raises robotic arm high while scouting the Bagnold Dune Field and observing dust devils inside Gale Crater on Mars on Sol 1625, Mar. 2, 2017, in this navcam camera mosaic stitched from raw images and colorized. Note: Wheel tracks at right, distant crater rim in background. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
What’s ahead for Curiosity in the coming weeks and months exploring VRR before moving onward and upwards to higher elevation?
“Over the next several months, Curiosity will explore Vera Rubin Ridge,” Meyer replied.
“This will be a big opportunity to ground-truth orbital observations. Of interest, so far, the hematite of VRR does not look that different from what we have been seeing all along the Murray formation. So, big question is why?”
“The view from VRR also provides better access to what’s ahead in exploring the next aqueous mineral feature – the clay, or phyllosilicates, which can be indicators of specific environments, putting constraints on variables such as pH and temperature,” Meyer explained.
The clay minerals or phyllosilicates form in more neutral water, and are thus extremely scientifically interesting since pH neutral water is more conducive to the origin and evolution of Martian microbial life forms, if they ever existed.
How far away are the clays ahead and when might Curiosity reach them?
“As the crow flies, the clays are about 0.5 km,” Meyer replied. “However, the actual odometer distance and whether the clays are where we think they are – area vs. a particular location – can add a fair degree of variability.”
The clay rich area is located beyond the ridge.
Over the past few months Curiosity make rapid progress towards the hematite-bearing location of Vera Rubin Ridge after conducting in-depth exploration of the Bagnold Dunes earlier this year.
“Vera Rubin Ridge is a high-standing unit that runs parallel to and along the eastern side of the Bagnold Dunes,” said Mark Salvatore, an MSL Participating Scientist and a faculty member at Northern Arizona University, in a mission update.
“From orbit, Vera Rubin Ridge has been shown to exhibit signatures of hematite, an oxidized iron phase whose presence can help us to better understand the environmental conditions present when this mineral assemblage formed.”
Curiosity is using the science instruments on the mast, deck and robotic arm turret to gather detailed research measurements with the cameras and spectrometers. The pair of miniaturized chemistry lab instruments inside the belly – CheMin and SAM – are used to analyze the chemical and elemental composition of pulverized rock and soil gathered by drilling and scooping selected targets during the traverse.
A key instrument is the drill which has not been operational. I asked Meyer for a drill update.
“The drill feed developed problems retracting (two stabilizer prongs on either side of the drill retract, controlling the rate of drill penetration),” Meyer replied.
“Because the root cause has not been found (think FOD) and the concern about the situation getting worse, the drill feed has been retracted and the engineers are working on drilling without the stabilizing prongs.”
“Note, a consequence is that you can still drill and collect sample but a) there is added concern about getting the drill stuck and b) a new method of delivering sample needs to be developed and tested (the drill feed normally needs to be moved to move the sample into the chimera). One option that looks viable is reversing the drill – it does work and they are working on the scripts and how to control sample size.”
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rover’s long term scientific expedition on the Red Planet.
“Lower Mount Sharp was chosen as a destination for the Curiosity mission because the layers of the mountain offer exposures of rocks that record environmental conditions from different times in the early history of the Red Planet. Curiosity has found evidence for ancient wet environments that offered conditions favorable for microbial life, if Mars has ever hosted life,” says NASA.
Stay tuned. In part 2 we’ll discuss the key findings from Curiosity’s first 5 years exploring the Red Planet.
As of today, Sol 1850, Oct. 19, 2017, Curiosity has driven over 10.89 miles (17.53 kilometers) since its August 2012 landing inside Gale Crater from the landing site to the ridge, and taken over 445,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Map shows route driven by NASA’s Mars rover Curiosity through Sol 1827 of the rover’s mission on Mars (September 27, 2017). Numbering of the dots along the line indicate the sol number of each drive. North is up. Since touching down in Bradbury Landing in August 2012, Curiosity has driven 10.84 miles (17.45 kilometers). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/UA
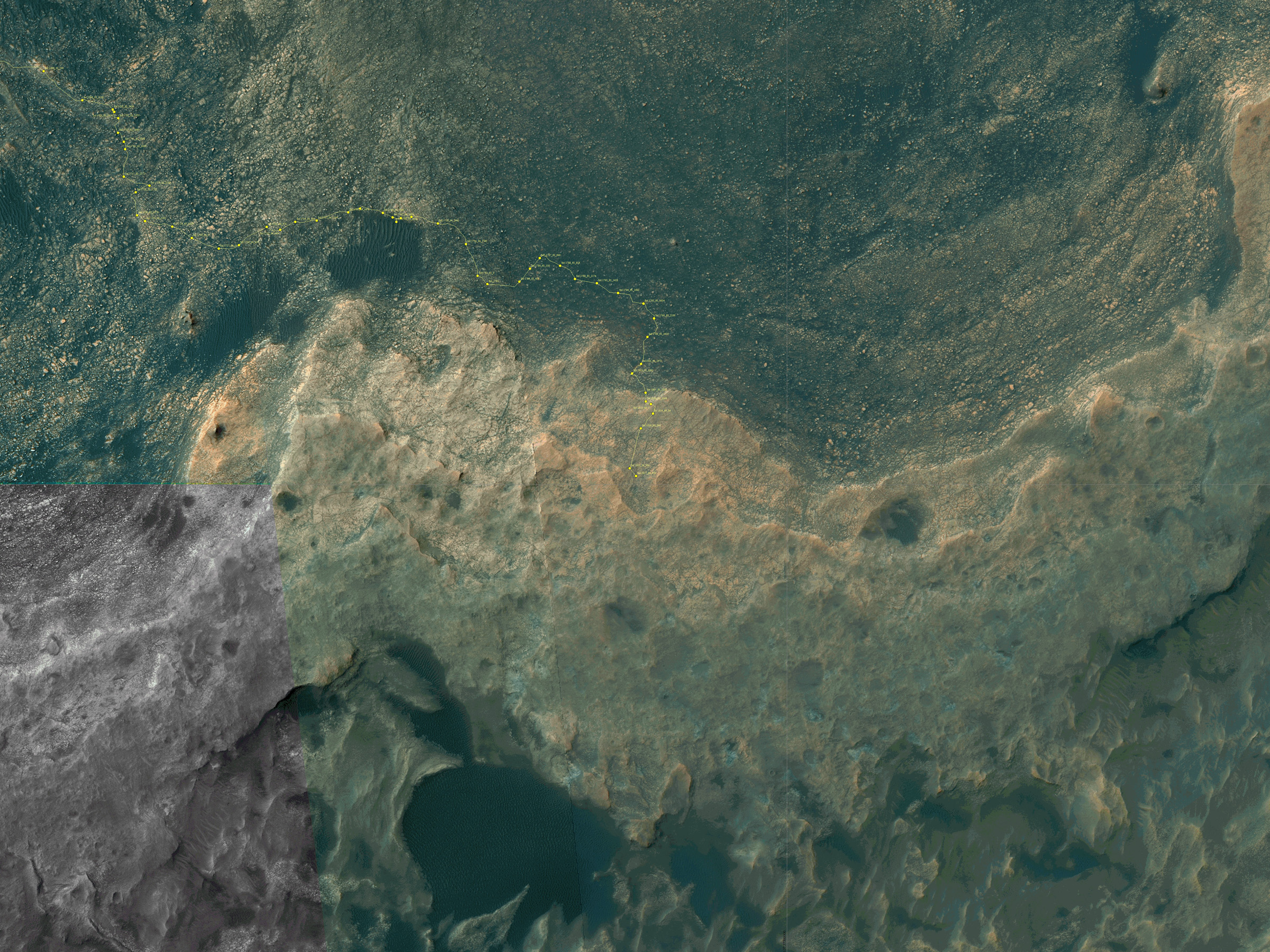
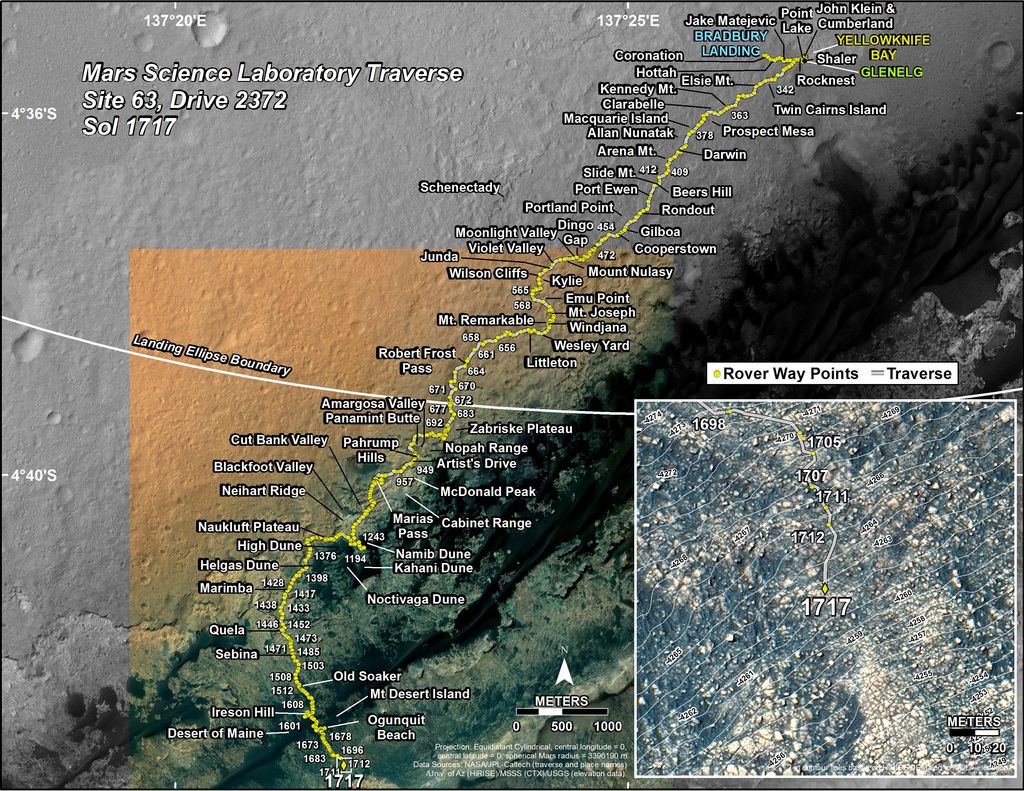
Curiosity’s Traverse Map Through Sol 1717. This map shows the route driven by NASA’s Mars rover Curiosity through the 1717 Martian day, or sol, of the rover’s mission on Mars (June 05, 2017). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL-Caltech/Univ. of Arizona
NASA’s Curiosity rover as seen simultaneously on Mars surface and from orbit on Sol 1717, June 5, 2017. The robot snapped this self portrait mosaic view while approaching Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater - backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images and colorized. Inset shows overhead orbital view of Curiosity (blue feature) amid rocky mountainside terrain taken the same day by NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover as seen simultaneously on Mars surface and from orbit on Sol 1717, June 5, 2017. The robot snapped this self portrait mosaic view while approaching Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater – backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images and colorized. Inset shows overhead orbital view of Curiosity (blue feature) amid rocky mountainside terrain taken the same day by NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
You can catch a glimpse of what its like to see NASA’s Curiosity Mars rover simultaneously high overhead from orbit and trundling down low across the Red Planet’s rocky surface as she climbs the breathtaking terrain of Mount Sharp – as seen in new images from NASA we have stitched together into a mosaic view showing the perspective views; see above.
Earlier this month on June 5, researchers commanded NASA’s Mars Reconnaissance Orbiter (MRO) to image the car sized Curiosity rover from Mars orbit using the spacecrafts onboard High Resolution Imaging Science Experiment (HiRISE) telescopic camera during Sol 1717 of her Martian expedition – see below.
HiRISE is the most powerful telescope ever sent to Mars.
And as she does nearly every Sol, or Martian day, Curiosity snapped a batch of new images captured from Mars surface using her navigation camera called navcam – likewise on Sol 1717.
Since NASA just released the high resolution MRO images of Curiosity from orbit, we assembled together the navcam camera raw images taken simultaneously on June 5 (Sol 1717), in order to show the actual vista seen by the six wheeled robot from a surface perspective on the same day.
The lead navcam photo mosaic shows a partial rover selfie backdropped by the distant rim of Gale Crater – and was stitched together by the imaging team of Ken Kremer and Marco Di Lorenzo.
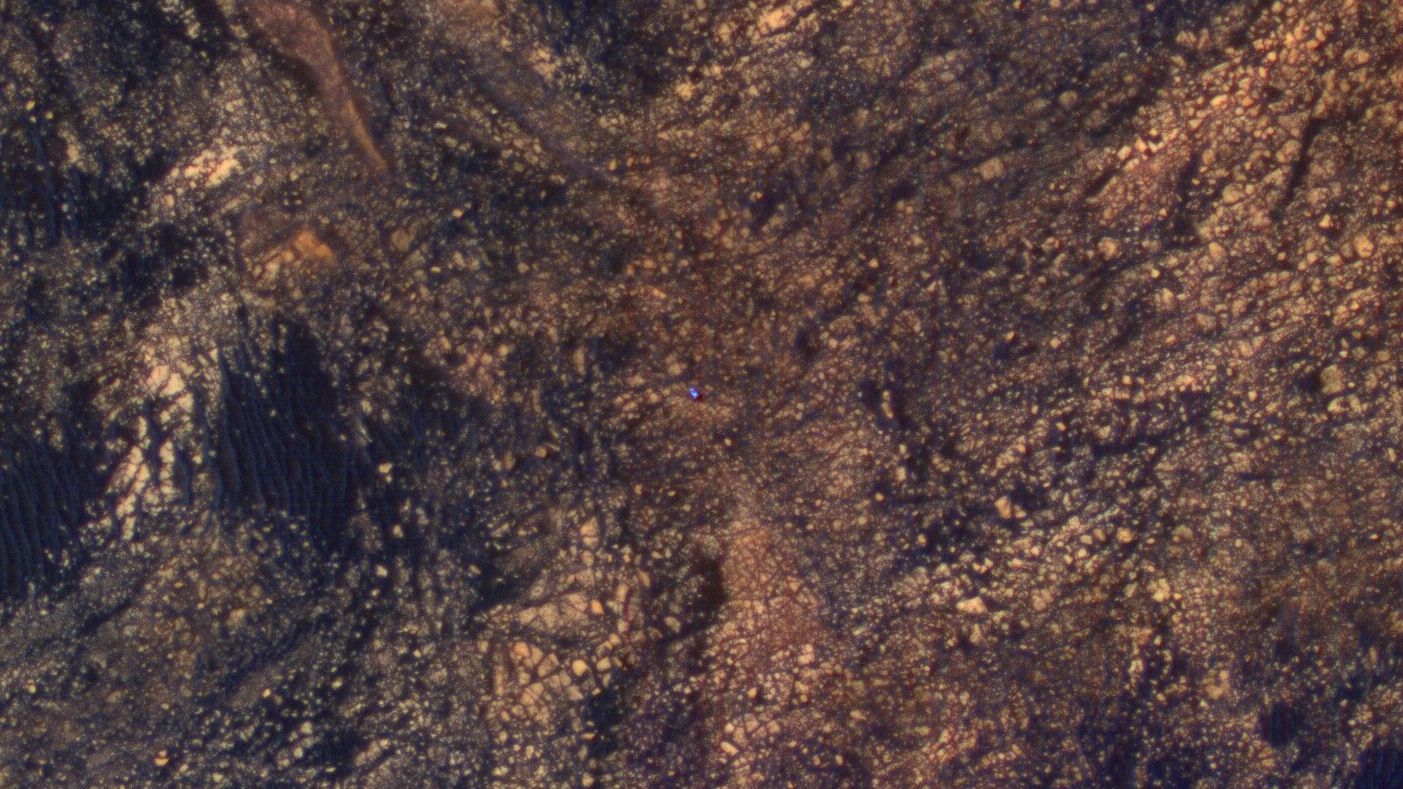
The feature that appears bright blue at the center of this scene is NASA’s Curiosity Mars rover amid tan rocks and dark sand on Mount Sharp, as viewed by the HiRISE camera on NASA’s Mars Reconnaissance Orbiter on June 5, 2017. The rover is about 10 feet long and not really as blue as it looks here. The image was taken as Curiosity was partway between its investigation of active sand dunes lower on Mount Sharp, and “Vera Rubin Ridge,” a destination uphill where the rover team intends to examine outcrops where hematite has been identified from Mars orbit. Credits: NASA/JPL-Caltech/Univ. of Arizona
Right now NASA’s Curiosity Mars Science Laboratory (MSL) rover is approaching her next science destination named “Vera Rubin Ridge” while climbing up the lower reaches of Mount Sharp, the humongous mountain that dominates the rover’s landing site inside Gale Crater.
“When the MRO image was taken, Curiosity was partway between its investigation of active sand dunes lower on Mount Sharp, and “Vera Rubin Ridge,” a destination uphill where the rover team intends to examine outcrops where hematite has been identified from Mars orbit,” says NASA.
“HiRISE has been imaging Curiosity about every three months, to monitor the surrounding features for changes such as dune migration or erosion.”
The MRO image has been color enhanced and shows Curiosity as a bright blue feature. It is currently traveling on the northwestern flank of Mount Sharp. Curiosity is approximately 10 feet long and 9 feet wide (3.0 meters by 2.8 meters).
“The exaggerated color, showing differences in Mars surface materials, makes Curiosity appear bluer than it really looks. This helps make differences in Mars surface materials apparent, but does not show natural color as seen by the human eye.”
See our mosaic of “Vera Rubin Ridge” and Mount Sharp below.
Curiosity images Vera Rubin Ridge during approach backdropped by Mount Sharp. This navcam camera mosaic was stitched from raw images taken on Sol 1726, June 14, 2017 and colorized. Credit: NASA/JPL/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Curiosity is making rapid progress towards the hematite-bearing location of Vera Rubin Ridge after conducting in-depth exploration of the Bagnold Dunes earlier this year.
“Vera Rubin Ridge is a high-standing unit that runs parallel to and along the eastern side of the Bagnold Dunes,” says Mark Salvatore, an MSL Participating Scientist and a faculty member at Northern Arizona University, in a new mission update.
“From orbit, Vera Rubin Ridge has been shown to exhibit signatures of hematite, an oxidized iron phase whose presence can help us to better understand the environmental conditions present when this mineral assemblage formed.”
Curiosity will use her cameras and spectrometers to elucidate the origin and nature of Vera Rubin Ridge and potential implications or role in past habitable environments.
“The rover will turn its cameras to Vera Rubin Ridge for another suite of high resolution color images, which will help to characterize any observed layers, fractures, or geologic contacts. These observations will help the science team to determine how Vera Rubin Ridge formed and its relationship to the other geologic units found within Gale Crater.”
To reach Vera Rubin Ridge, Curiosity is driving east-northeast around two small patches of dunes just to the north. She will then turn “southeast and towards the location identified as the safest place for Curiosity to ascend the ridge. Currently, this ridge ascent point is approximately 370 meters away.”
Curiosity rover raises robotic arm high while scouting the Bagnold Dune Field and observing dust devils inside Gale Crater on Mars on Sol 1625, Mar. 2, 2017, in this navcam camera mosaic stitched from raw images and colorized. Note: Wheel tracks at right, distant crater rim in background. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
“Lower Mount Sharp was chosen as a destination for the Curiosity mission because the layers of the mountain offer exposures of rocks that record environmental conditions from different times in the early history of the Red Planet. Curiosity has found evidence for ancient wet environments that offered conditions favorable for microbial life, if Mars has ever hosted life,” says NASA.
NASA’s Curiosity rover explores sand dunes inside Gale Crater with Mount Sharp in view on Mars on Sol 1611, Feb. 16, 2017, in this navcam camera mosaic, stitched from raw images and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of today, Sol 1733, June 21, 2017, Curiosity has driven over 10.29 miles (16.57 kilometers) since its August 2012 landing inside Gale Crater, and taken over 420,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Learn more about the upcoming SpaceX launch of BulgariaSat 1, recent SpaceX Dragon CRS-11 resupply launch to ISS, NASA missions and more at Ken’s upcoming outreach events at Kennedy Space Center Quality Inn, Titusville, FL:
June 22-24: “SpaceX BulgariaSat 1 launch, SpaceX CRS-11 and CRS-10 resupply launches to the ISS, Inmarsat 5 and NRO Spysat, EchoStar 23, SLS, Orion, Commercial crew capsules from Boeing and SpaceX , Heroes and Legends at KSCVC, ULA Atlas/John Glenn Cygnus launch to ISS, SBIRS GEO 3 launch, GOES-R weather satellite launch, OSIRIS-Rex, Juno at Jupiter, InSight Mars lander, SpaceX and Orbital ATK cargo missions to the ISS, ULA Delta 4 Heavy spy satellite, Curiosity and Opportunity explore Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
Curiosity’s Traverse Map Through Sol 1717. This map shows the route driven by NASA’s Mars rover Curiosity through the 1717 Martian day, or sol, of the rover’s mission on Mars (June 05, 2017). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL-Caltech/Univ. of Arizona
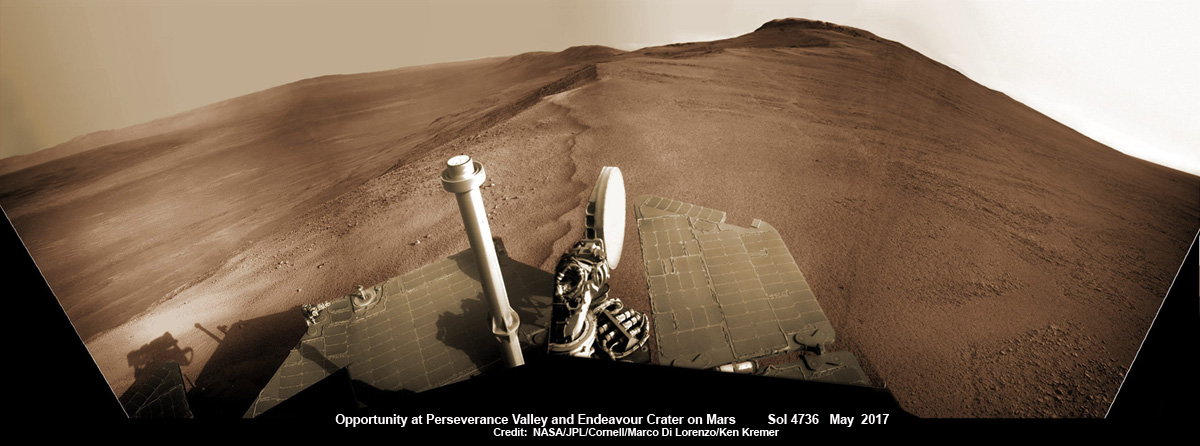
Opportunity rover looks south from the top of Perseverance Valley along the rim of Endeavour Crater on Mars in this partial self portrait including the rover deck and solar panels. Perseverance Valley descends from the right and terminates down near the crater floor. This navcam camera photo mosaic was assembled from raw images taken on Sol 4736 (20 May 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Opportunity rover looks south from the top of Perseverance Valley along the rim of Endeavour Crater on Mars in this partial self portrait including the rover deck and solar panels. Perseverance Valley descends from the right and terminates down near the crater floor. This navcam camera photo mosaic was assembled from raw images taken on Sol 4736 (20 May 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Now well into her 13th year roving the Red Planet, NASA’s astoundingly resilient Opportunity rover has arrived at the precipice of “Perseverance Valley” – overlooking the upper end of an ancient fluid-carved valley on Mars “possibly water-cut” that flows down into the unimaginably vast eeriness of alien Endeavour crater.
In a remarkable first time feat and treat for having ‘persevered’ so long on the inhospitably frigid Martian terrain, Opportunity has been tasked by her human handlers to drive down a Martian gully carved billions of years ago – by a fluid that might have been water – and conduct unparalleled scientific exploration, that will also extend into the interior of Endeavour Crater for the first time.
No Mars rover has done that before.
“This will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes,” Ray Arvidson, Opportunity Deputy Principal Investigator of Washington University in St. Louis, told Universe Today.
“Opportunity has arrived at the head of Perseverance Valley, a possible water-cut valley here at a low spot along the rim of the 22-km diameter Endeavour impact crater,” says Larry Crumpler, a rover science team member from the New Mexico Museum of Natural History & Science.
“The next month or so will be an exciting time, for no rover has ever driven down a potential ancient water-cut valley before,” Crumpler gushes.
“Perseverance Valley” is located along the eroded western rim of gigantic Endeavour crater – as illustrated by our exclusive photo mosaics herein created by the imaging team of Ken Kremer and Marco Di Lorenzo.
The mosaics show the “spillway” as the entry point to the ancient valley.
NASA’s Opportunity rover acquired this Martian panoramic view from a promontory that overlooks Perseverance Valley below – scanning from north to south. It is centered on due East and into the interior of Endeavour crater. Perseverance Valley descends from the right and terminates down near the crater floor in the center of the panorama. The far rim of Endeavour crater is seen in the distance, beyond the dark floor. Rover deck and wheel tracks at right. This navcam camera photo mosaic was assembled from raw images taken on Sol 4730 (14 May 2017) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“Investigations in the coming weeks will “endeavor” to determine whether this valley was eroded by water or some other dry process like debris flows,” explains Crumpler.
“It certainly looks like a water cut valley. But looks aren’t good enough. We need additional evidence to test that idea.”
The valley slices downward from the crest line through the rim from west to east at a breathtaking slope of about 15 to 17 degrees – and measures about two football fields in length!
Huge Endeavour crater spans some 22 kilometers (14 miles) in diameter on the Red Planet. Perseverance Valley slices eastwards at approximately the 8 o’clock position of the circular shaped crater. It sits just north of a rim segment called “Cape Byron.”
Why go and explore the gully at Perseverance Valley?
“Opportunity will traverse to the head of the gully system [at Perseverance] and head downhill into one or more of the gullies to characterize the morphology and search for evidence of deposits,” Arvidson elaborated.
“Hopefully test among dry mass movements, debris flow, and fluvial processes for gully formation. The importance is that this will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes. Will search for cross bedding, gravel beds, fining or coarsening upward sequences, etc., to test among hypotheses.”
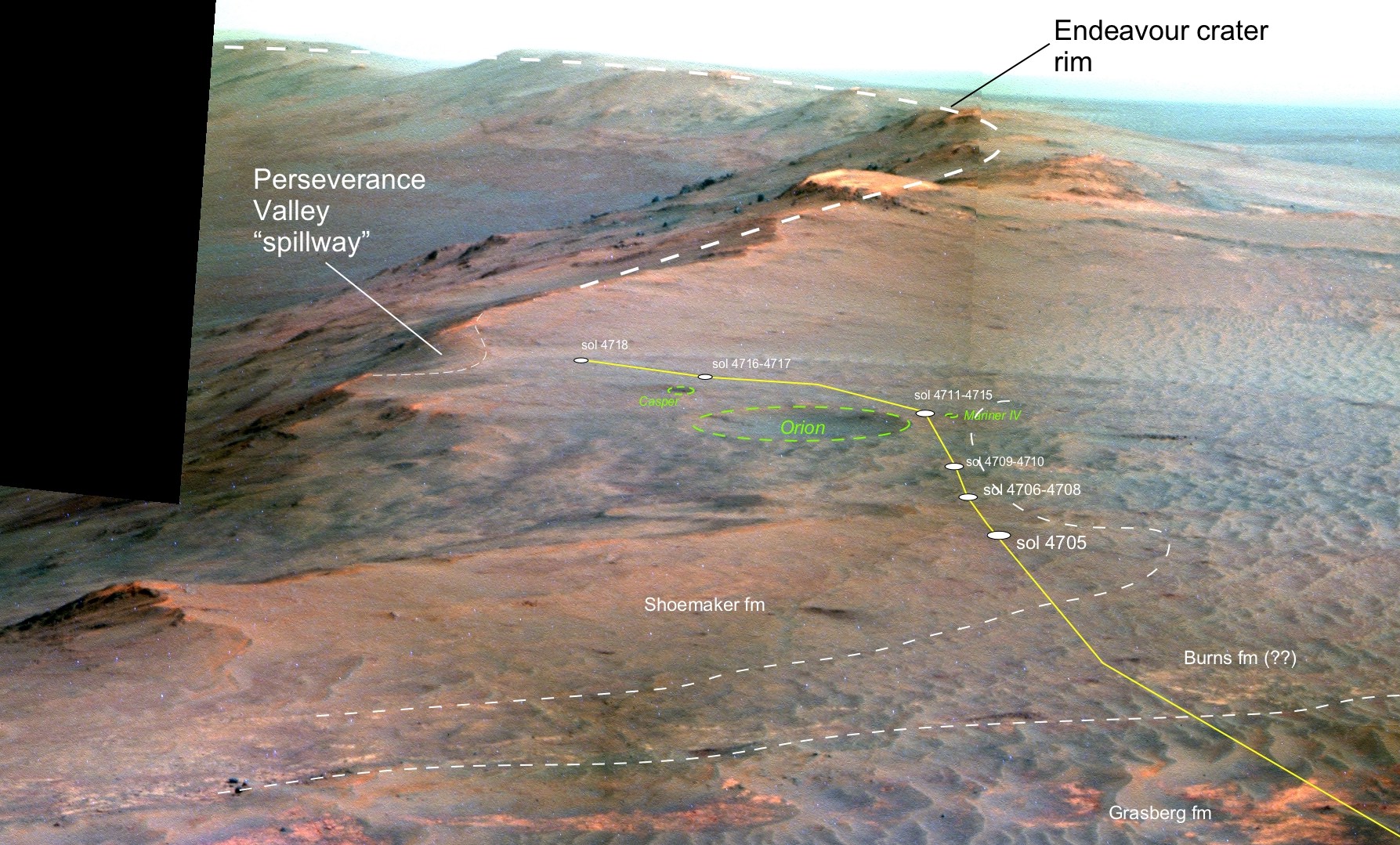
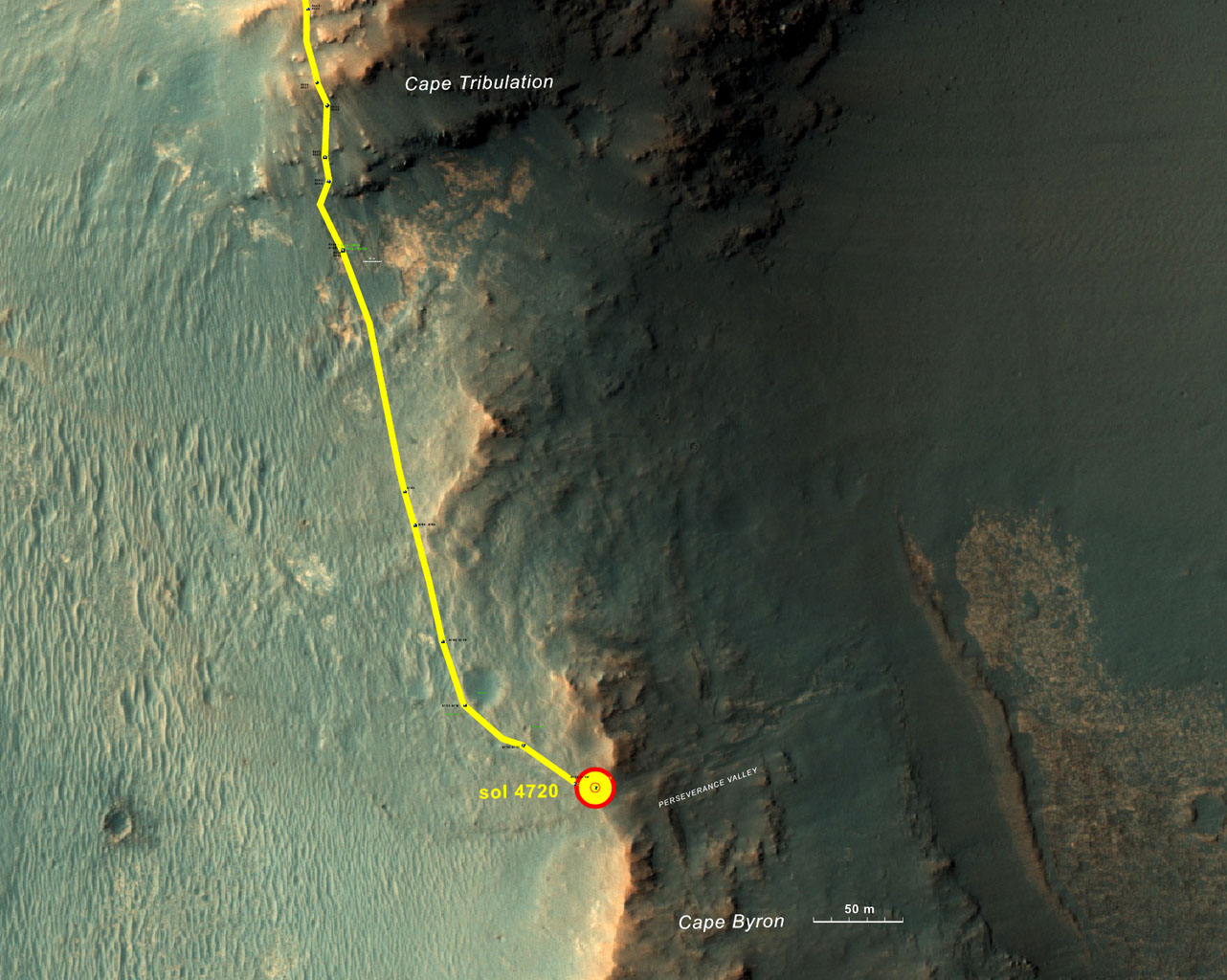
Perspective view of Opportunity’s traverse along Endeavour crater rim over the last few weeks towards the Perseverance Valley “spillway” on Mars during Spring 2017. The entry point for the planned drive back into the crater is visible as the low notch just to the left (east) of the current (sol 4718) rover position. Credit: NASA/JPL/Cornell/NMMNH /Larry Crumpler
Exploring the ancient valley is the main science destination of the current two-year extended mission (EM #10) for the teenaged robot, that officially began Oct. 1, 2016. It’s just the latest in a series of extensions going back to the end of Opportunity’s prime mission in April 2004.
What are the immediate tasks ahead that Opportunity must accomplish before descending down the gully to thoroughly and efficiently investigate the research objectives?
In a nutshell, extensive imaging from a local high point promontory to create a long-baseline 3 D stereo image of the valley and a “walk-about” to assess the local geology.
The rover is collecting images from two widely separated points at a dip at the valley spillway to build an “extraordinarily detailed three-dimensional analysis of the terrain” called a digital elevation map.
“Opportunity has been working on a panorama from the overlook for the past couple of sols. The idea is to get a good overview of the valley from a high point before driving down it,” Crumpler explains.
“But before we drive down the valley, we want to get a good sense of the geologic features here on the head of the valley. It could come in handy as we drive down the valley and may help us understand some things, particularly the lithology of any materials we find on the valley floor or at the terminus down near the crater floor.”
“So we will be doing a short “walk-about” here on the outside of the crater rim near the “spillway” into the valley.”
“We will drive down it to further assess its origin and to further explore the structure and stratigraphy of this large impact crater.”
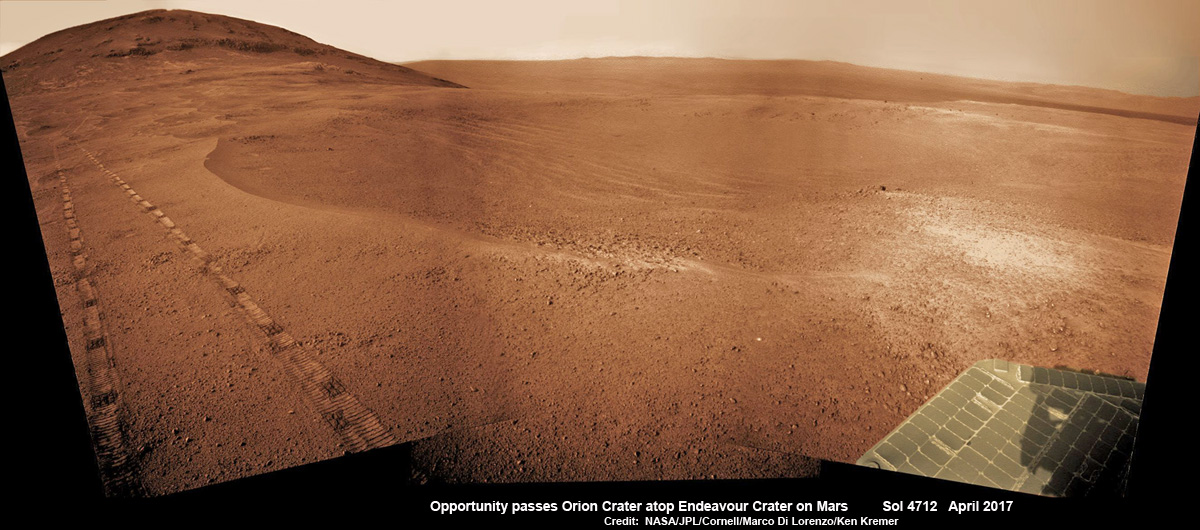
NASA’s Opportunity Mars rover passed near this small, 90-foot-wide and relatively fresh crater in April 2017, during the 45th anniversary of the Apollo 16 mission to the moon. The rover team chose to call it “Orion Crater,” after the Apollo 16 lunar module, Orion, which carried astronauts John Young and Charles Duke to and from the surface of the moon in April 1972 while crewmate Ken Mattingly piloted the Apollo 16 command module, Casper, in orbit around the moon. The rover’s Navigation Camera (Navcam) recorded this view assembled from raw images taken on Sol 4712 (26 April 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
The six wheeled rover landed on Mars on January 24, 2004 PST on the alien Martian plains at Meridiani Planum – as the second half of a stupendous sister act.
Expected to last just 3 months or 90 days, Opportunity has now endured nearly 13 ½ years or an unfathomable 53 times beyond the “warrantied” design lifetime.
Her twin sister Spirit, had successfully touched down 3 weeks earlier on January 3, 2004 inside 100-mile-wide Gusev crater and survived more than six years.
Opportunity has been exploring Endeavour almost six years – since arriving at the humongous crater in 2011. Endeavour crater was formed when it was carved out of the Red Planet by a huge meteor impact billions of years ago.
“Endeavour crater dates from the earliest Martian geologic history, a time when water was abundant and erosion was relatively rapid and somewhat Earth-like,” explains Crumpler.
Exactly what the geologic process was that carved Perseverance Valley into the rim of Endeavour Crater billions of years ago has not yet been determined, but there are a wide range of options researchers are considering.
“Among the possibilities: It might have been flowing water, or might have been a debris flow in which a small amount of water lubricated a turbulent mix of mud and boulders, or might have been an even drier process, such as wind erosion,” say NASA scientists.
“The mission’s main objective with Opportunity at this site is to assess which possibility is best supported by the evidence still in place.”
Extensive imaging with the mast mounted pancam and navcam cameras is currently in progress.
“The long-baseline stereo imaging will be used to generate a digital elevation map that will help the team carefully evaluate possible driving routes down the valley before starting the descent,” said Opportunity Project Manager John Callas of JPL, in a statement.
“Reversing course back uphill when partway down could be difficult, so finding a path with minimum obstacles will be important for driving Opportunity through the whole valley. Researchers intend to use the rover to examine textures and compositions at the top, throughout the length and at the bottom, as part of investigating the valley’s history.”
The team is also dealing with a new wheel issue and evaluating fixes. The left-front wheel is stuck due to an actuator stall.
“The rover experienced a left-front wheel steering actuator stall on Sol 4750 (June 4, 2017) leaving the wheel ‘toed-out’ by 33 degrees,” the team reported in a new update.
Thus the extensive Pancam panorama is humorously being called the “Sprained Ankle Panorama.” Selected high-value targets of the surrounding area will be imaged with the full 13-filter Pancam suite.
After reaching the bottom of Perseverance Valley, Opportunity will explore the craters interior for the first time during the mission.
“Once down at the end of the valley, Opportunity will be directed to explore the crater fill on a drive south at the foot of the crater walls,” states Crumpler.
As of today, June 17, 2017, long lived Opportunity has survived over 4763 Sols (or Martian days) roving the harsh environment of the Red Planet.
Opportunity has taken over 220,800 images and traversed over 27.87 miles (44.86 kilometers) – more than a marathon.
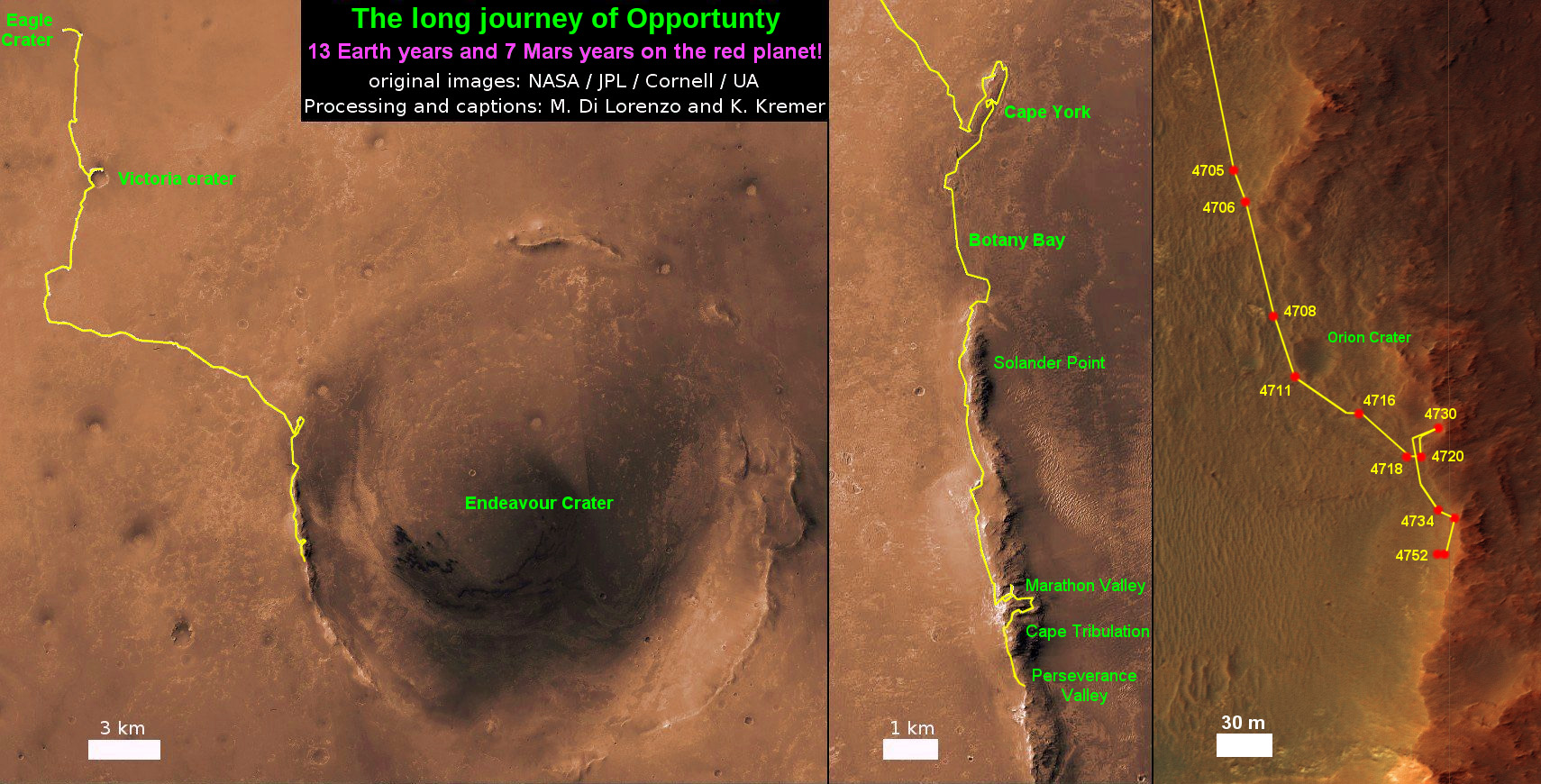
See our updated route map below. It shows the context of the rovers over 13 year long traverse spanning more than the 26 mile distance of a Marathon runners race.
The rover surpassed the 27 mile mark milestone on November 6, 2016 (Sol 4546).
NASA’s Opportunity rover acquired this Martian panoramic view from a promontory that overlooks Perseverance Valley below – scanning from north to south. It is centered on due East and into the interior of Endeavour crater. Perseverance Valley descends from the right and terminates down near the crater floor in the center of the panorama. The far rim of Endeavour crater is seen in the distance, beyond the dark floor. Rover deck and wheel tracks at right. This navcam camera photo mosaic was assembled from raw images taken on Sol 4730 (14 May 2017) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of Sol 4759 (June 13, 2017) the power output from solar array energy production is currently 343 watt-hours with an atmospheric opacity (Tau) of 0.842 and a solar array dust factor of 0.529, before heading into another southern hemisphere Martian winter later in 2017. It will count as Opportunity’s 8th winter on Mars.
“The science team is really jazzed at starting to see this area up close and looking for clues to help us distinguish among multiple hypotheses about how the valley formed,” said Opportunity Project Scientist Matt Golombek of NASA’s Jet Propulsion Laboratory, Pasadena, California.
NASA’s Opportunity rover scans around and across to vast Endeavour crater on Dec. 19, 2016, as she climbs steep slopes on the way to reach a water carved gully along the eroded craters western rim. Note rover wheel tracks at center. This navcam camera photo mosaic was assembled from raw images taken on Sol 4587 (19 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Meanwhile Opportunity’s younger sister rover Curiosity traverses and drills into the lower sedimentary layers at the base of Mount Sharp.
And NASA continues building the next two robotic missions due to touch down in 2018 and 2020.
13 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2017. This map shows the entire 44 kilometer (27 mi) path the rover has driven on the Red Planet during over 13 years and more than a marathon runners distance for over 4763 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater at the head of Perseverance Valley. After studying Spirit Mound and ascending back uphill the rover has reached her next destination in May 2017- the Martian water carved gully at Perseverance Valley near Orion crater. Rover surpassed Marathon distance on Sol 3968 after reaching 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and searched for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Learn more about the Opportunity rover and upcoming SpaceX launch of BulgariaSat 1, recent SpaceX Dragon CRS-11 resupply launch to ISS, NASA missions and more at Ken’s upcoming outreach events at Kennedy Space Center Quality Inn, Titusville, FL:
June 17-19: “Opportunity Mars rover, SpaceX BulgariaSat 1 launch, SpaceX CRS-11 and CRS-10 resupply launches to the ISS, Inmarsat 5 and NRO Spysat, EchoStar 23, SLS, Orion, Commercial crew capsules from Boeing and SpaceX , Heroes and Legends at KSCVC, ULA Atlas/John Glenn Cygnus launch to ISS, SBIRS GEO 3 launch, GOES-R weather satellite launch, OSIRIS-Rex, Juno at Jupiter, InSight Mars lander, SpaceX and Orbital ATK cargo missions to the ISS, ULA Delta 4 Heavy spy satellite, Curiosity explores Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
This graphic shows the route that NASA’s Mars Exploration Rover Opportunity drove in its final approach to “Perseverance Valley” on the western rim of Endeavour Crater during spring 2017. Credits: NASA/JPL-Caltech/Univ. of Arizona/NMMNH
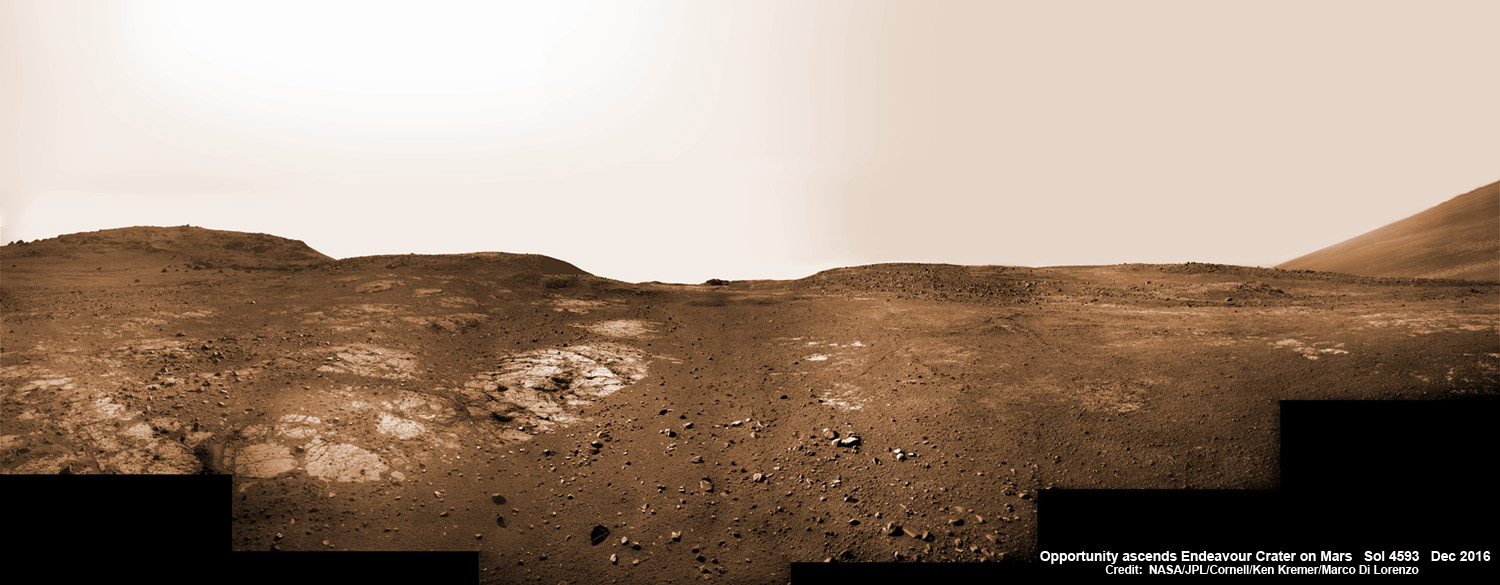
13 Years on Mars! On Christmas Day 2016, NASA’s Opportunity rover scans around vast Endeavour crater as she ascends steep rocky slopes on the way to reach a water carved gully along the eroded craters western rim. This navcam camera photo mosaic was assembled from raw images taken on Sol 4593 (25 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity rover raises robotic arm high while scouting the Bagnold Dune Field and observing dust devils inside Gale Crater on Mars on Sol 1625, Mar. 2, 2017, in this navcam camera mosaic stitched from raw images and colorized. Note: Wheel tracks at right, distant crater rim in background. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity rover raises robotic arm high while scouting the Bagnold Dune Field and observing dust devils inside Gale Crater on Mars on Sol 1625, Mar. 2, 2017, in this navcam camera mosaic stitched from raw images and colorized. Note: Wheel tracks at right, distant crater rim in background. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Tis a season of incredible wind driven activity on Mars like few before witnessed by our human emissaries ! Its summer on the Red Planet and the talented scientists directing NASA’s Curiosity rover have targeted the robots cameras so proficiently that they have efficiently spotted a multitude of ‘Dust Devils’ racing across across the dunes fields of Gale Crater– see below.
The ‘Dust Devils’ are actually mini tornadoes like those seen on Earth.
This sequence of images shows a dust-carrying whirlwind, called a dust devil, on lower Mount Sharp inside Gale Crater, as viewed by NASA’s Curiosity Mars Rover during the summer afternoon of Sol 1613 (Feb. 18, 2017). The navcam camera images are in pairs that were taken about 12 seconds apart, with an interval of about 90 seconds between pairs. Timing is accelerated and not fully proportional in this animation. Contrast has been modified to make frame-to-frame changes easier to see. A black frame provides a marker between repeats of the sequence. Credit: NASA/JPL-Caltech/TAMU
Furthermore they whip up the dust more easily in the lower gravity field on Mars compared to Earth. Mars gravity is about one third of Earth’s.
Right now it’s summer inside the rovers southern hemisphere landing site at Gale Crater. And summer is the windiest time of the Martian year.
“Dust devils are whirlwinds that result from sunshine warming the ground, prompting convective rising of air that has gained heat from the ground. Observations of Martian dust devils provide information about wind directions and interaction between the surface and the atmosphere,” as described by researchers.
So now is the best time to observe and photograph the dusty whirlwinds in action as they flitter amazingly across the craters surface carrying dust in their wake.
This sequence of images shows a dust-carrying whirlwind, called a dust devil, scooting across ground inside Gale Crater, as observed on the local summer afternoon of NASA’s Curiosity Mars Rover’s 1,597th Martian day, or sol (Feb. 1, 2017). Set within a broader southward view from the rover’s Navigation Camera, the rectangular area outlined in black was imaged multiple times over a span of several minutes to check for dust devils. Images from the period with most activity are shown in the inset area. The images are in pairs that were taken about 12 seconds apart, with an interval of about 90 seconds between pairs. Timing is accelerated in this animation. Credits: NASA/JPL-Caltech/TAMU
Therefore researchers are advantageously able to utilize Curiosity in a new research campaign that “focuses on modern wind activity in Gale” on the lower slope of Mount Sharp — a layered mountain inside the crater.
NASA’s Curiosity rover explores sand dunes inside Gale Crater with Mount Sharp in view on Mars on Sol 1611, Feb. 16, 2017, in this navcam camera mosaic stitched from raw images and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Indeed, this past month Curiosity began her second sand dune campaign focusing on investigating active dunes on the mountain’s northwestern flank that are ribbon-shaped linear dunes.
“In these linear dunes, the sand is transported along the ribbon pathway, while the ribbon can oscillate back and forth, side to side,” said Nathan Bridges, a Curiosity science team member at the Johns Hopkins University Applied Physics Laboratory in Laurel, Maryland, in a statement.
The left side of this 360-degree panorama from NASA’s Curiosity Mars rover shows the long rows of ripples on a linear shaped dune in the Bagnold Dune Field on the northwestern flank of Mount Sharp. The rover’s Navigation Camera recorded the component images of this mosaic on Feb. 5, 2017. Credits: NASA/JPL-Caltech
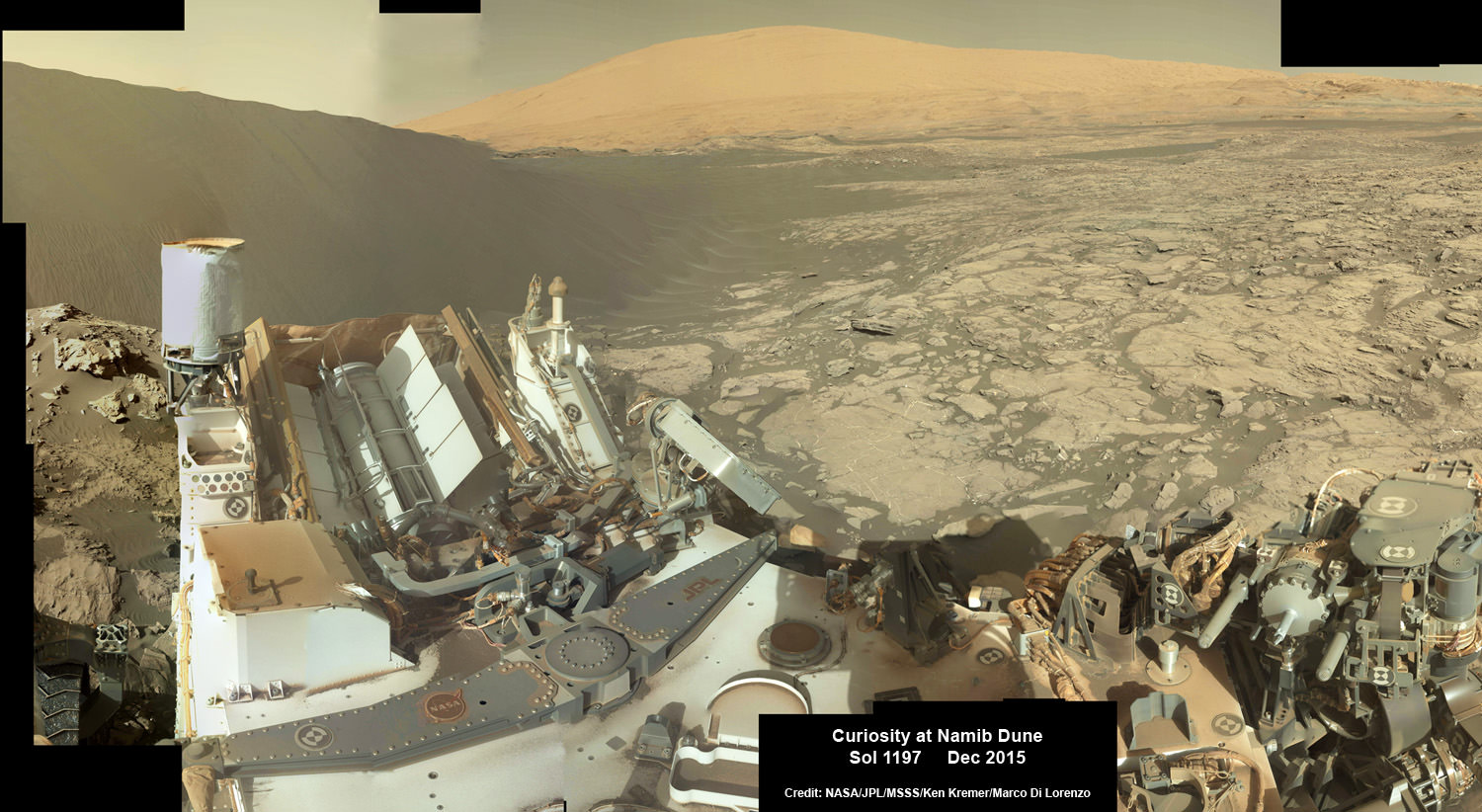
These new dunes are different from those investigated during the first dune campaign back in late 2015 and early 2016 that examined crescent-shaped dunes, including Namib Dune in our mosaic below.
The initial dune campaign actually involved the first ever up-close study of active sand dunes anywhere other than Earth, as I reported at the time.
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 – backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
By snapping a series of targeted images pointed in just the right direction using the rovers mast mounted navigation cameras, or navcams, the researchers have composed a series of ‘Dust Devil’ movies – gathered together here for your enjoyment.
“We’re keeping Curiosity busy in an area with lots of sand at a season when there’s plenty of wind blowing it around,” said Curiosity Project Scientist Ashwin Vasavada of NASA’s Jet Propulsion Laboratory, Pasadena, California.
“One aspect we want to learn more about is the wind’s effect on sorting sand grains with different composition. That helps us interpret modern dunes as well as ancient sandstones.”
The movies amply demonstrate that Mars is indeed an active world and winds are by far the dominant force shaping and eroding the Red Planets alien terrain – despite the thin atmosphere less than 1 percent of Earth’s.
Indeed scientists believe that wind erosion over billions of years of time is what caused the formation of Mount Sharp at the center of Gale Crater by removing vast amounts of dust and sedimentary material — about 15,000 cubic miles (64,000 cubic kilometers) — as Mars evolved from a wet world to the dry, desiccated planet we see today.
Gale crater was originally created over 3.6 billion years ago when a gigantic asteroid or comet smashed into Mars. The devastating impact “excavated a basin nearly 100 miles (160 kilometers) wide. Sediments including rocks, sand and silt later filled the basin, some delivered by rivers that flowed in from higher ground surrounding Gale.”
Winds gradually carved away so much sediment and dirt that we are left with the magnificent mountain in view today.
The whirlwinds called “dust devils” have been recorded moving across terrain in the crater, in sequences of afternoon images taken several seconds apart.
The contrast has been enhanced to better show the dust devils in action.
Watch this short NASA video showing Martian Dust Devils seen by Curiosity:
Video Caption: Dust Devils On Mars Seen by NASA’s Curiosity Rover. On recent summer afternoons on Mars, navigation cameras aboard NASA’s Curiosity Mars rover observed several whirlwinds carrying Martian dust across Gale Crater. Dust devils result from sunshine warming the ground, prompting convective rising of air. All the dust devils were seen in a southward direction from the rover. Timing is accelerated and contrast has been modified to make frame-to-frame changes easier to see. Credit: NASA/JPL
The team is also using the probes downward-looking Mars Descent Imager (MARDI) camera for a straight down high resolution up-close view looking beneath the rover. The purpose is to check for daily movement of the dunes she is sitting on to see “how far the wind moves grains of sand in a single day’s time.”
This pair of images shows effects of one Martian day of wind blowing sand underneath NASA’s Curiosity Mars rover on a non-driving day for the rover. Each image was taken just after sundown by the rover’s downward-looking Mars Descent Imager (MARDI). The area of ground shown in the images spans about 3 feet (about 1 meter) left-to-right. The images were taken on Jan. 23, 2017 (Sol 1587) and Jan. 24, 2017 (Sol 1588). The day-apart images by MARDI were taken as a part of investigation of wind’s effects during Martian summer, the windiest time of year in Gale Crater. Credit: NASA/JPL-Caltech/MSSS
These dune investigations have to be done now, because the six wheeled robot will soon ascend Mount Sharp, the humongous layered mountain at the center of Gale Crater.
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
“Before Curiosity heads farther up Mount Sharp, the mission will assess movement of sand particles at the linear dunes, examine ripple shapes on the surface of the dunes, and determine the composition mixture of the dune material,” researchers said.
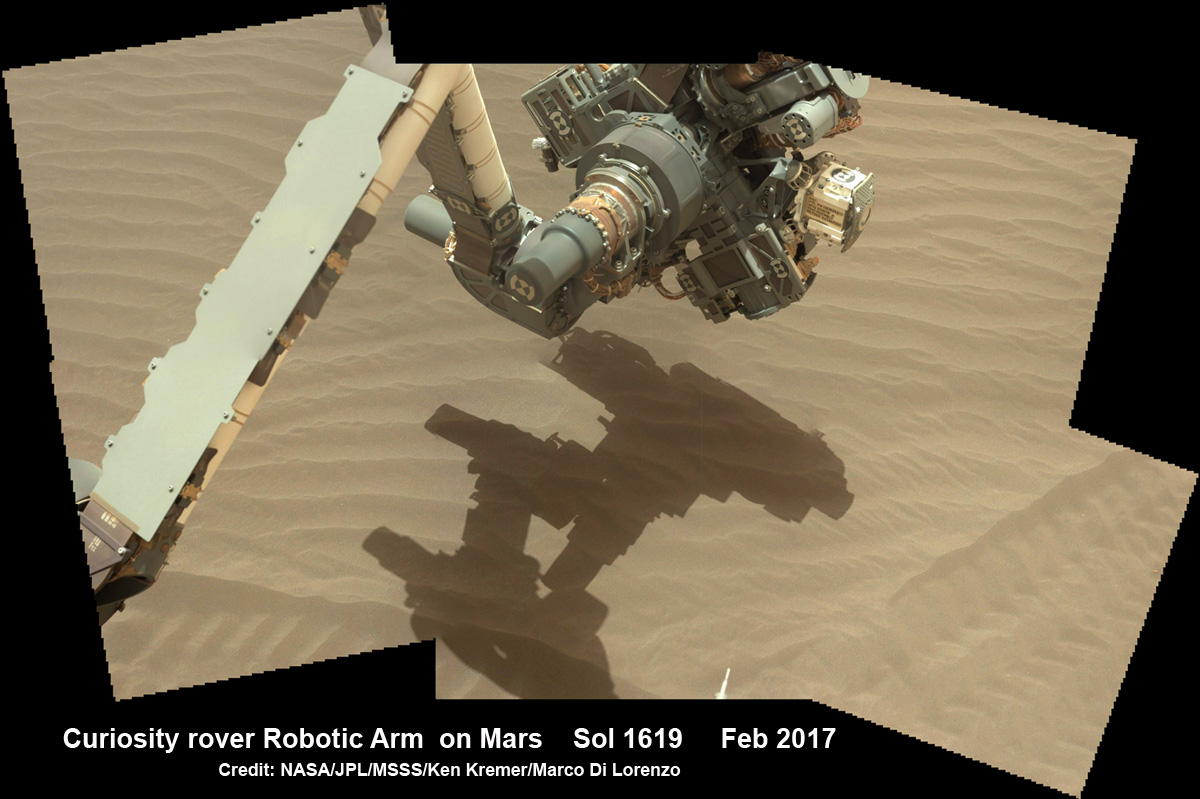
NASA’s Curiosity rover extends robotic arm to investigate sand dunes inside Gale Crater on Mars on Sol 1619, Feb. 24, 2017. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity is also using the science instruments on the robotic arm turret to gather detailed research measurements with the cameras and spectrometers.
As of today, Sol 1625, March 2, 2017, Curiosity has driven over 9.70 miles (15.61 kilometers) since its August 2012 landing inside Gale Crater, and taken over 391,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
This map shows the two locations of a research campaign by NASA’s Curiosity Mars rover mission to investigate active sand dunes on Mars. In late 2015, Curiosity reached crescent-shaped dunes, called barchans. In February 2017, the rover reached a location where the dunes are linear in shape. Credits: NASA/JPL-Caltech/Univ. of Arizona
This map shows the route driven by NASA’s Mars rover Curiosity through Sol 1612 (February 17, 2017) of the rover’s mission on Mars. The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Image Credit: NASA/JPL-Caltech/Univ. of Arizona
The Mars rover Curiosity on the road to Hematite Ridge. Credit: NASA/JPl-Caltech/MSSS/Seán Doran.
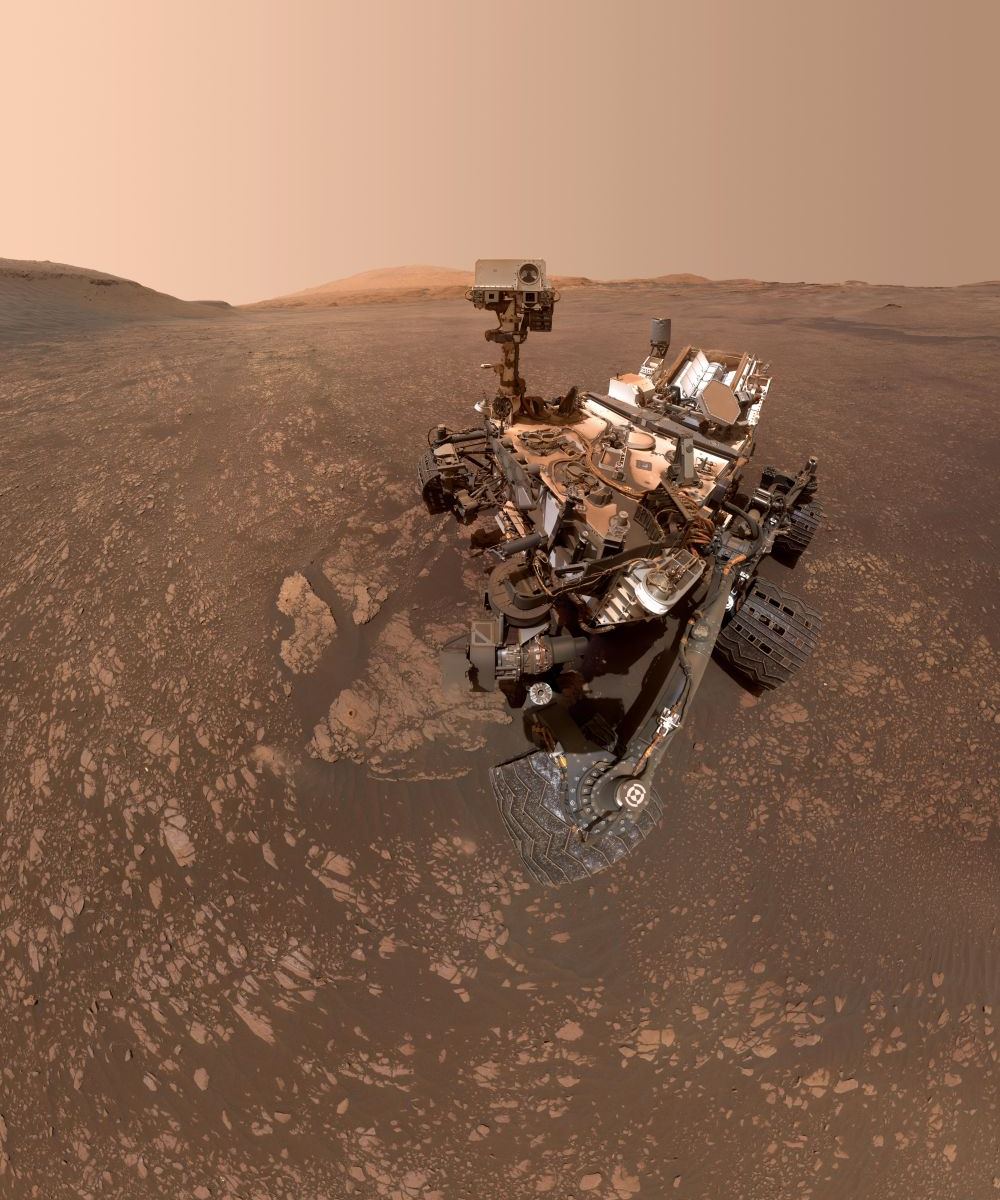
We all love the ‘selfies’ the Curiosity rover takes of itself sitting on Mars. We love them because it’s so amazing to see a human-made object on another world, and these images give us hope that one day we might have pictures of ourselves standing on the surface of the Red Planet.
But wouldn’t it be great if we see Curiosity ‘in action’ on Mars, and be like a fly on a rock, watching the rover roll past us?
Thanks to creative artist Seán Doran, we can do just that. Take a look at this absolutely amazing video Seán created, using real images of the Mars landscape from Curiosity and the HiRISE camera on the Mars Reconnaissance Orbiter, with a GCI Curiosity roving around.
Please note that Curiosity doesn’t actually move this fast, as in the video it is going about 8 kph, whereas in reality, the rover travels at a top speed of about .16 kph. But still, this is just fantastic!
“As much as I enjoy looking at the images from Mars, it is difficult to get a real sense of the scene as there is no obvious Earthly scale cue,” Seán told Universe Today via email. “No trees, plants, buildings or humans. So, I decided to put Curiosity into her own photographs to help us relate to them.”
Seán has provided a glimpse at how to do this, and says there are two ways of achieving these results.
One, is the easy way:
Create a photomosaic of a scene where tracks are present.
Render a 3D model of Curiosity to the same relative angle of the tracks and composite this into the image.
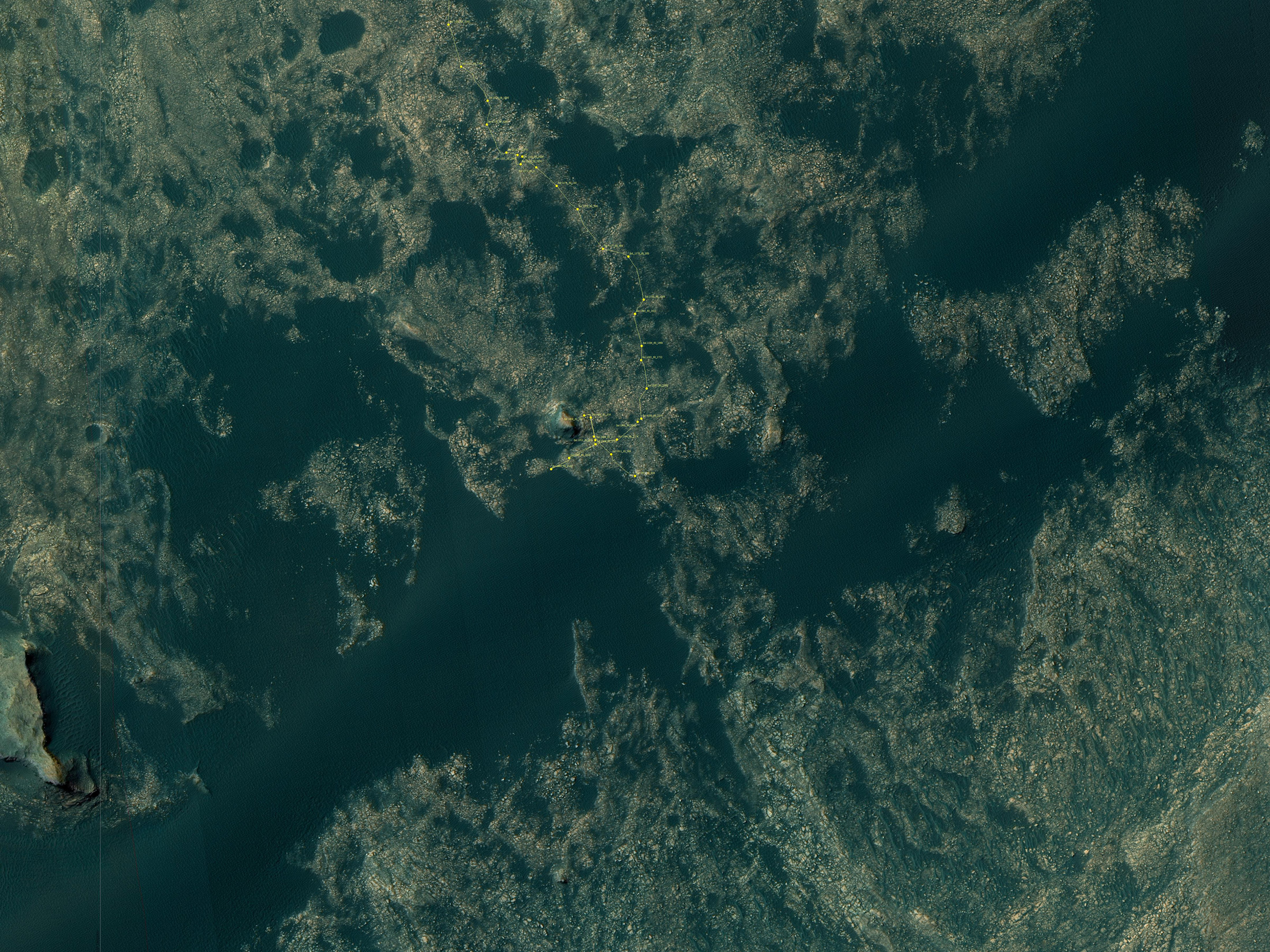
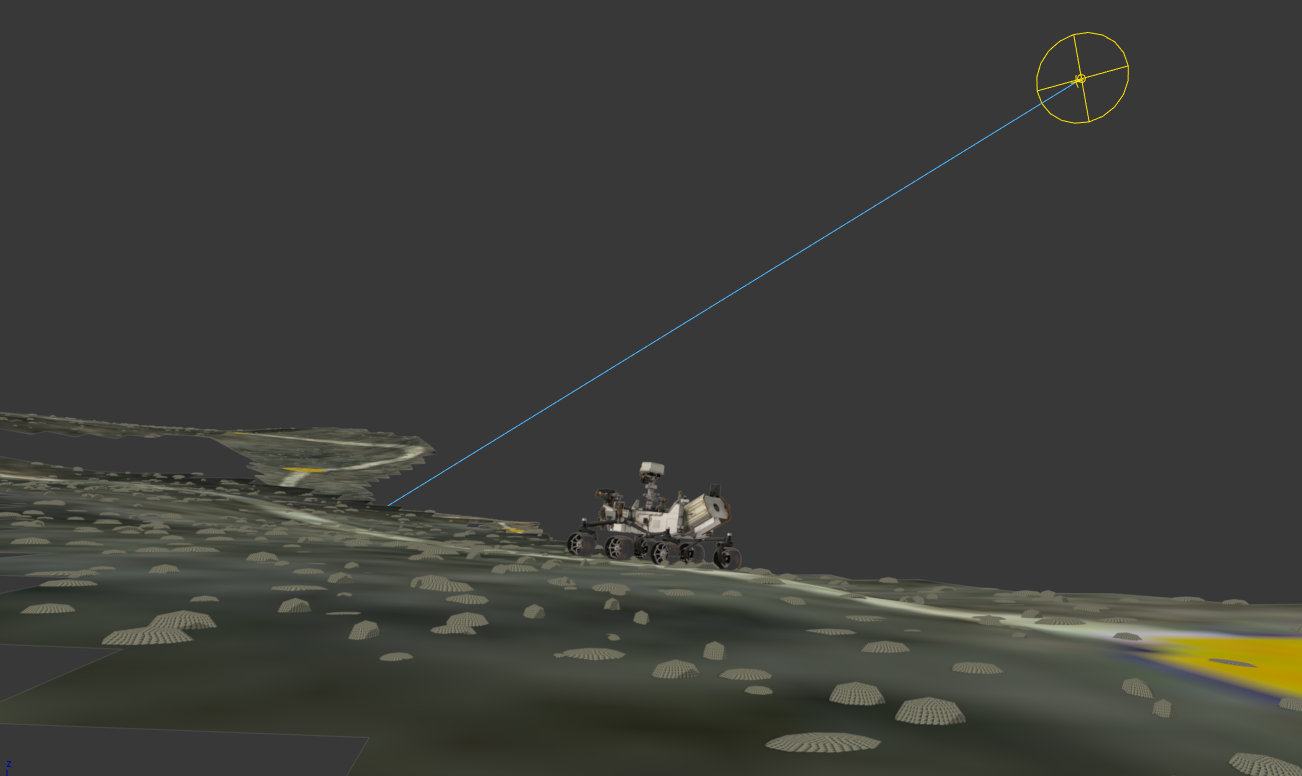
Or, there’s the hard way, a process which allows Seán to ‘drive’ Curiosity across the field of view of any photomosaic the rover has taken, whether there are tracks or not. This process involves using the what are called Digital Terrain Model (DTM) data from HiRISE, which provide elevation and terrain information (more info about DTMs in our recent article here) and by mapping with a virtual camera.
But to make everything realistic, your virtual rover needs to be the right size and even the right weight.
“It is critical to accurately determine the size of Curiosity in the virtual scene and this is done by comparing images of the rover taken by HiRISE and making sure they match,” Seán said. “By matching the viewpoint and the field of view it is possible to derive an accurate scale for Curiosity at any point in the scene.”
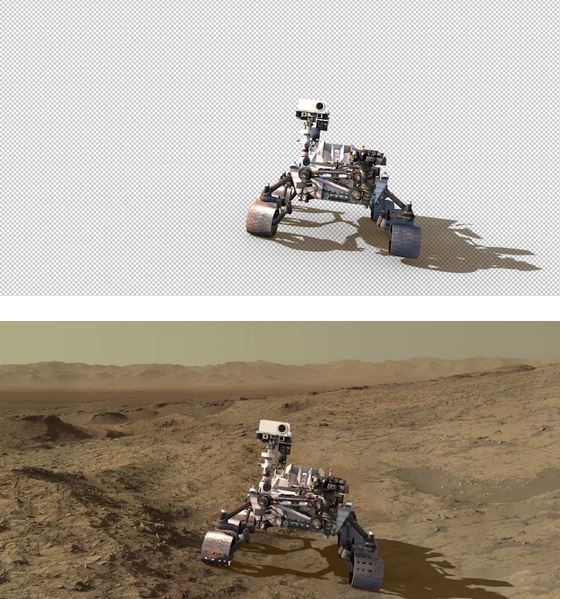
So by using this view from HiRISE of Curiosity sitting on the Naukluft Plateau:
HiRISE image of the Curiosity rover on the surface of Mars, on the Naukluft Plateau. Credit: NASA/JPL/University of Arizona
And then using Curiosity’s image of the same location, he can put a true-to-size rover in the image:
A true-to-size CGI rover inserted in the view of the Naukluft Plateau. Credit: NASA/JPL/University of Arizona/Seán Doran.
Then he ‘builds’ the route and terrain to make it even more realistic.
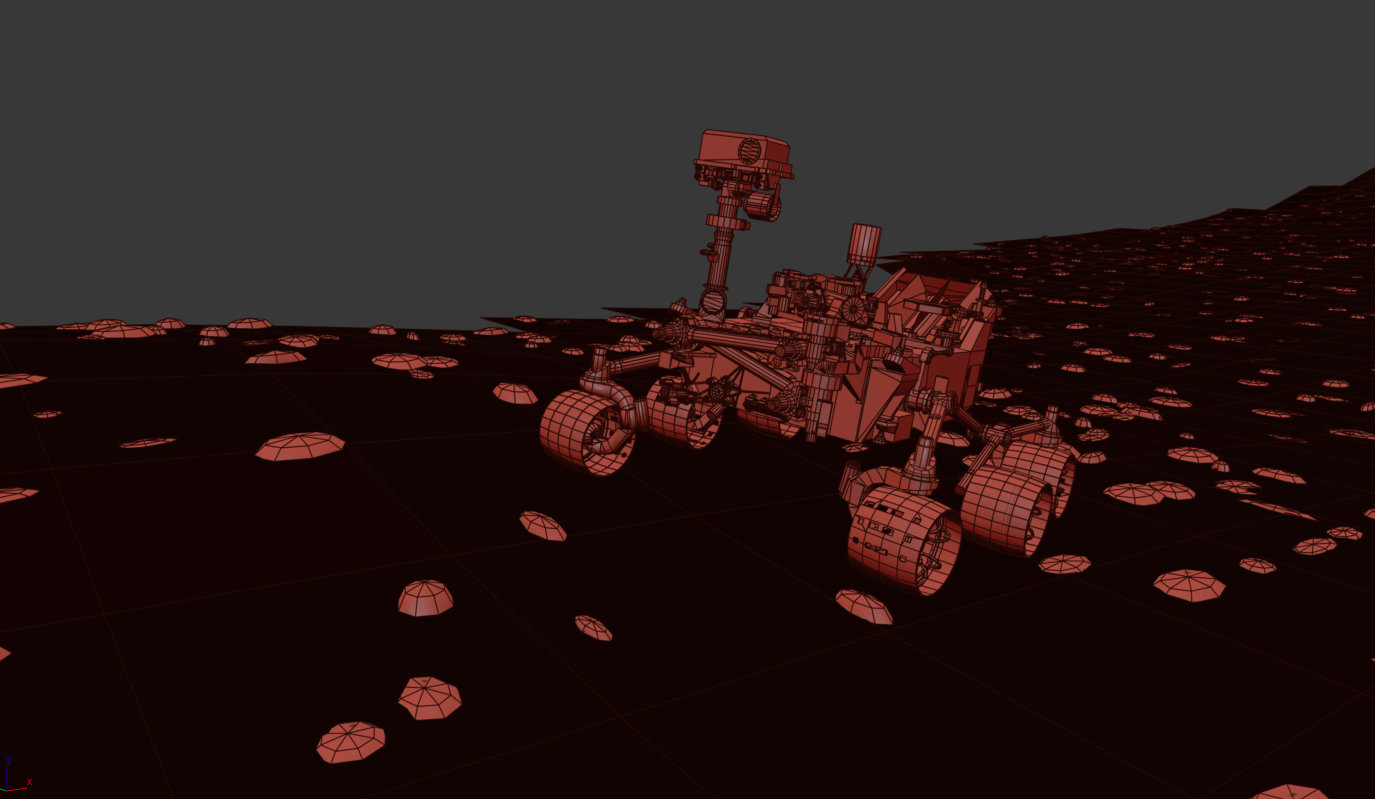
“Before I drive Curiosity I need to build a rocky collision course so she can physically interact with the environment,” he said. “This really helps to sell the final shot.”
Simulated terrain and rover on the Naukluft Plateau. Credit: Seán Doran.
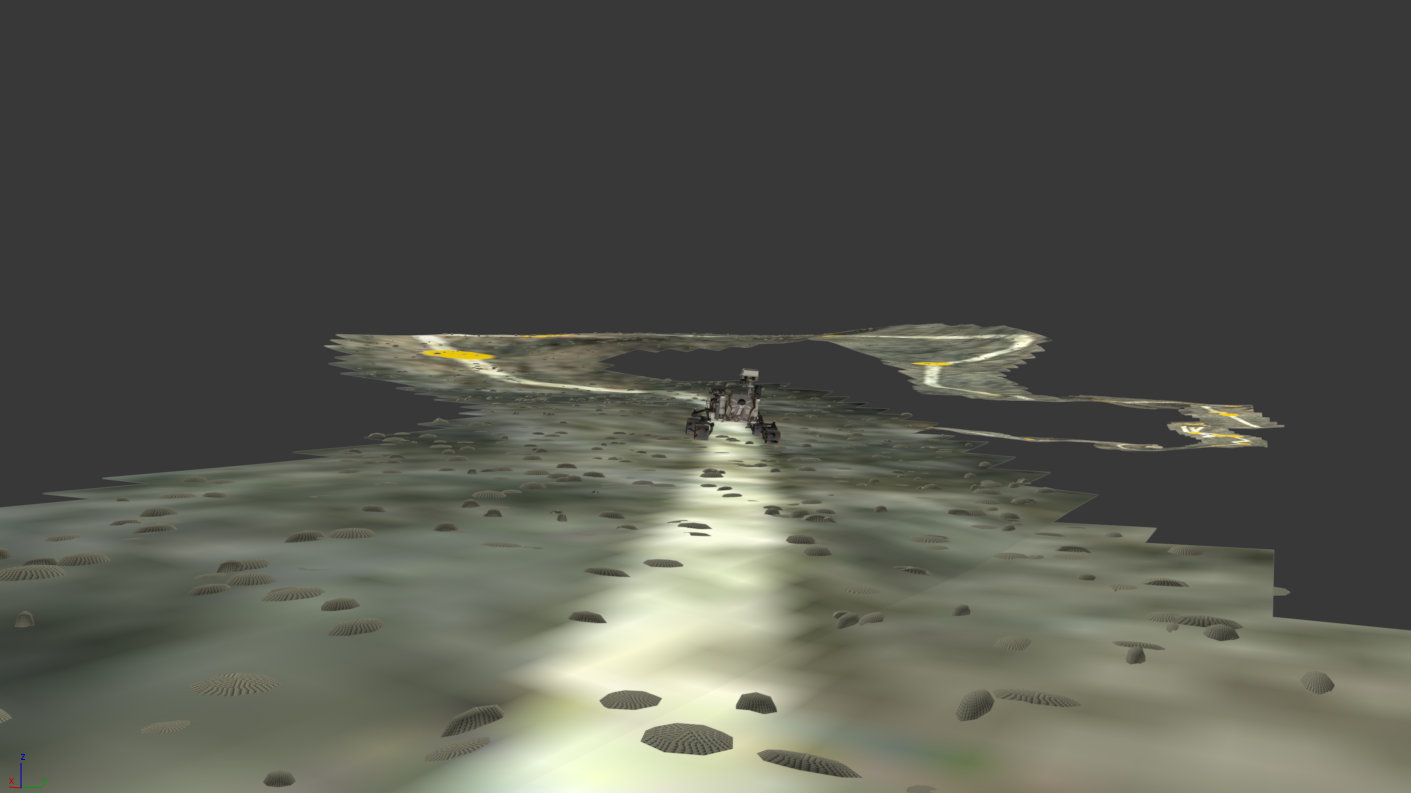
Then Seán builds a ‘car rig’ for Curiosity and drives her across the scene, in line with the actual route taken. Seán says good choices for doing this are using MadCar and DriveMaster for 3DS Max.
Simulated Curiosity rover on the Martian terrain, created using MadCar & DriveMaster for 3DS Max. Credit: Seán Doran.
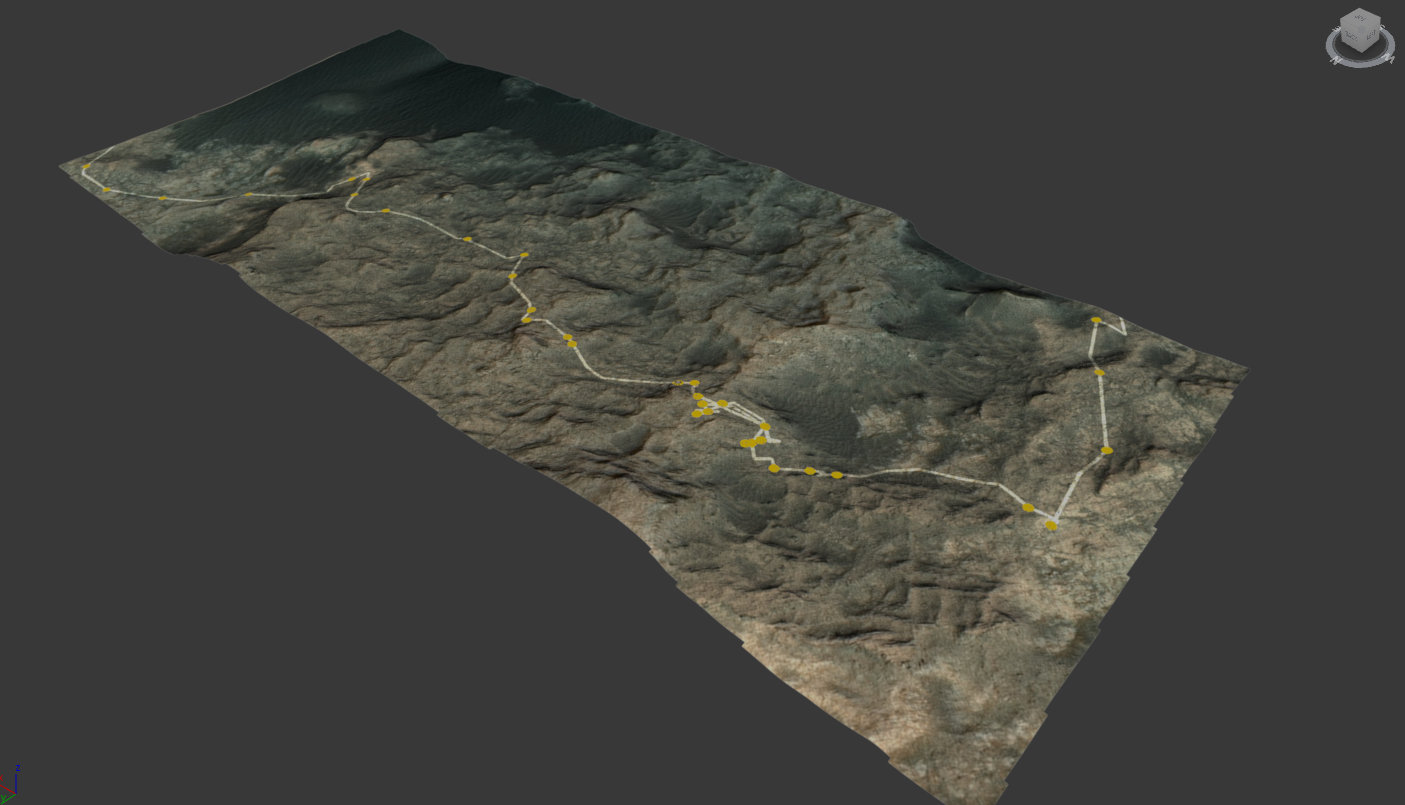
Then he takes a look at the big picture, taking the HiRISE image of the area and using the DTM files to create elevation and texture, and adds the route the rover will take so he knows where to ‘drive’ the rover:
Full extent of Naukluft Plateau built with HiRISE elevation and texture data, with the route superimposed. Credit: NASA/JPL/University of Arizona/Seán Doran.
Then comes the time-consuming part, where once he has a good animation, he needs to render out each shot, plus he matches the Sun position so the virtual shadows cast will match those in the photomosaic. (Wow!)
Simulated rover and terrain with position of the Sun. Credit: Seán Doran.
“I render separate passes for the background photomosaic and the foreground Curiosity,” Seán explained. “The HiRISE physics model is rendered with a Shadow Matte material which only catches shadows, this enables the rover to be easily blended in the final stage of the build.”
Then, everything is brought together in Adobe After Effects, where further image processing is used to blend both render elements together.
Simulated rover inserted in the scene with Adobe After Effects. Credit: Seán Doran.
We thank Seán Doran not only for completing this intricate process we can all enjoy, but for sharing the details!
“There is nothing trivial about building these assets, they are made out of fascination with the material and desire to communicate the excitement of being ‘present’ on another planet,” Seán said. “But I think it a great way to help people engage with such an exciting mission.”