Special Guest: Dr. Steve B. Howell, Project Scientist on Kepler to discuss the great new results coming form the K2 mission – the repurposed Kepler mission.
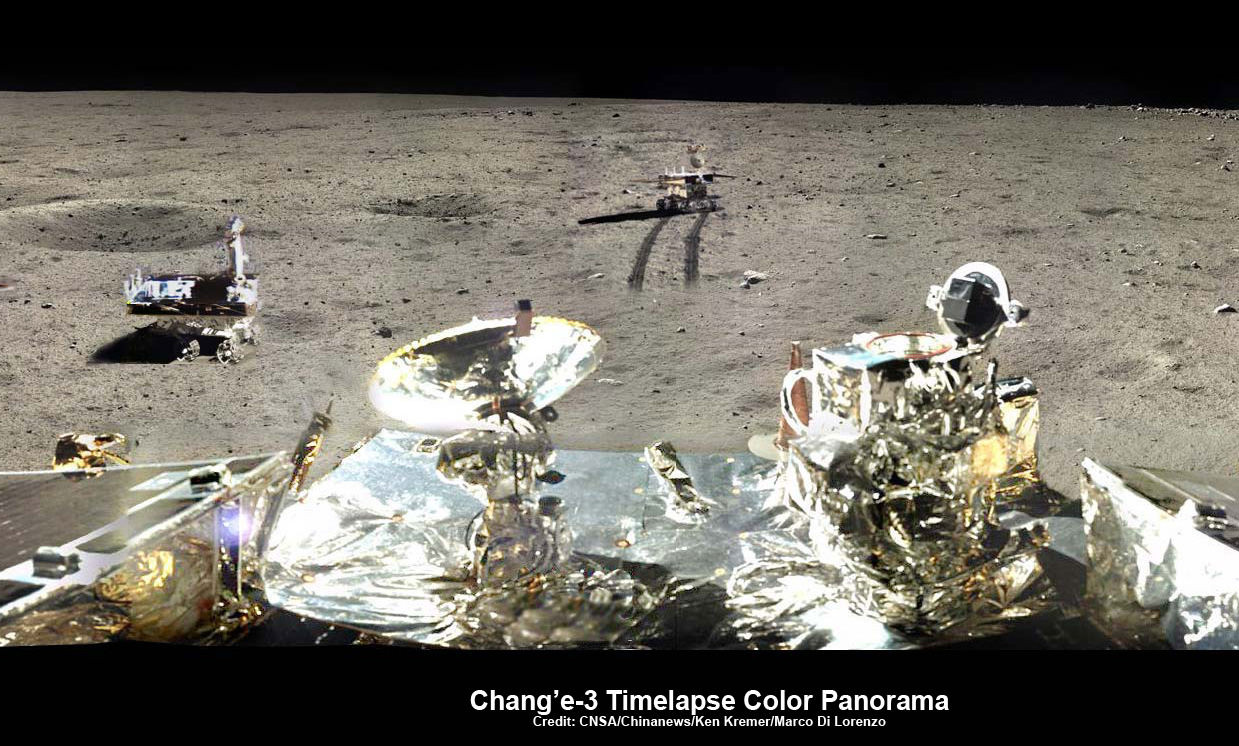
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
China plans lunar far side landing with hardware similar to Chang’e-3 lander
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo.
See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: [/caption]
Chinese scientists plan to carry out the highly complex lunar landing mission using a near identical back up to the nations highly successful Chang’e-3 rover and lander – which touched down in December 2013.
If successful, China would become the first country to accomplish the history making task of a Lunar far side landing.
“The mission will be carried out by Chang’e-4, a backup probe for Chang’e-3, and is slated to be launched before 2020,” said Zou Yongliao from the moon exploration department under the Chinese Academy of Sciences, according to a recent report in China’s government owned Xinhua news agency.
Zou made the remarks at a deep-space exploration forum in China.
“China will be the first to complete the task if it is successful,” said Zou.
Chinese space scientists have been evaluating how best to utilize the Chang’e-4 hardware, built as a backup to Chang’e-3, ever since China’s successful inaugural soft landing on the Moon was accomplished by Chang’e-3 in December 2013 with the mothership lander and piggybacked Yutu lunar rover.
Chang’e-3/Yutu Timelapse Color Panorama This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.html
Plans to launch Chang’e-4 in 2016 were eventually abandoned in favor of further evaluation.
After completing an intense 12 month study ordered by China’s government, space officials confirmed that the lunar far side landing was the wisest use of the existing space hardware.
Chang’e-4 will be modified with a larger payload.
“Chang’e-4 is very similar to Chang’e-3 in structure but can handle more payload,” said Zou.
“It will be used to study the geological conditions of the dark side of the moon.”
The moon is tidally locked with the Earth so that only one side is ever visible. But that unique characteristic makes it highly attractive to scientists who have wanted to set up telescopes and other research experiments on the lunar far side for decades.
“The far side of the moon has a clean electromagnetic environment, which provides an ideal field for low frequency radio study. If we can can place a frequency spectrograph on the far side, we can fill a void,” Zou elaborated.
China will also have to launch another lunar orbiter in the next few years to enable the Chang’e-4 lander and rover to transmit signals and science data back to Chinese mission control on Earth.
In the meantime, China already announced its desire to forge ahead with an ambitious mission to return samples from the lunar surface later this decade.
The Chinese National Space Agency (CNSA) plans to launch the Chang’e-5 lunar sample return mission in 2017 as the third step in the nations far reaching lunar exploration program.
“Chang’e-5 will achieve several breakthroughs, including automatic sampling, ascending from the moon without a launch site and an unmanned docking 400,000 kilometers above the lunar surface,” said Li Chunlai, one of the main designers of the lunar probe ground application system, accoding to Xinhua.
The first step involved a pair of highly successful lunar orbiters named Chang’e-1 and Chang’e-2 which launched in 2007 and 2010.
The second step involved the hugely successful Chang’e-3 mothership lander and piggybacked Yutu moon rover which safely touched down on the Moon at Mare Imbrium (Sea of Rains) on Dec. 14, 2013 – marking China’s first successful spacecraft landing on an extraterrestrial body in history, and chronicled extensively in my reporting here at Universe Today.
360-degree time-lapse color panorama from China’s Chang’e-3 lander. This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.html
See above and herein our time-lapse photo mosaics showing China’s Yutu rover dramatically trundling across the Moon’s stark gray terrain in the first weeks after she rolled all six wheels onto the desolate lunar plains.
The complete time-lapse mosaic shows Yutu at three different positions trekking around the landing site, and gives a real sense of how it maneuvered around on its 1st Lunar Day.
The 360 degree panoramic mosaic was created by the imaging team of scientists Ken Kremer and Marco Di Lorenzo from images captured by the color camera aboard the Chang’e-3 lander and was featured at Astronomy Picture of the Day (APOD) on Feb. 3, 2014.
Chang’e-3 and Yutu landed on a thick deposit of volcanic material.
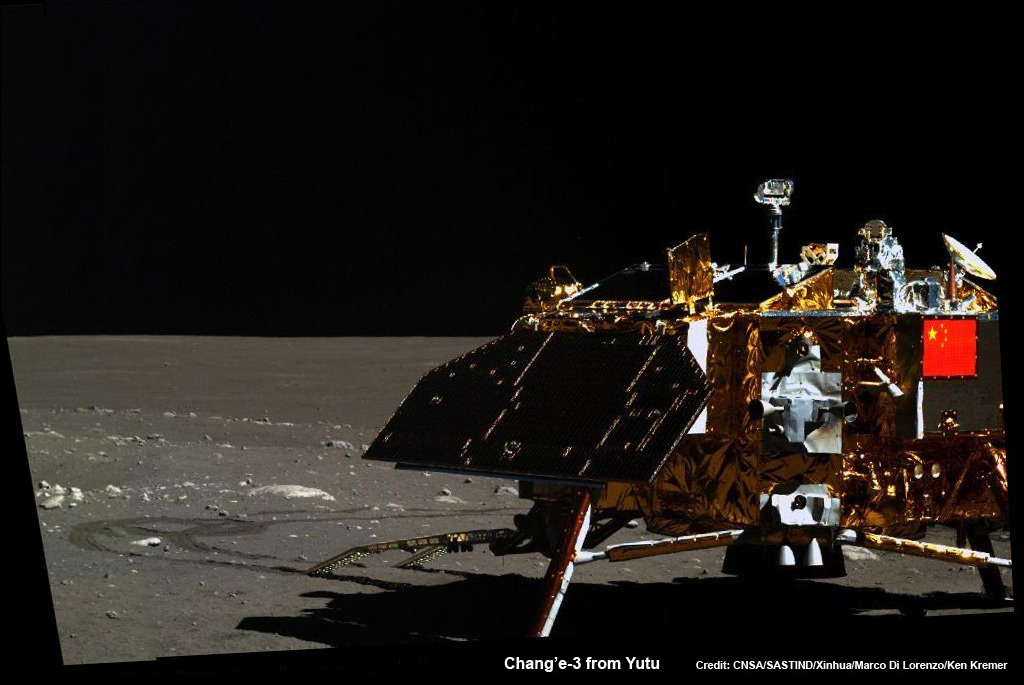
Mosaic of the Chang’e-3 moon lander and the lunar surface taken by the camera on China’s Yutu moon rover from a position south of the lander during Lunar Day 3. Note the landing ramp and rover tracks at left. Credit: CNSA/SASTIND/Xinhua/Marco Di Lorenzo/Ken Kremer
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Host: Fraser Cain (@fcain) Special Guest:Dr. Rhys Taylor, Former Arecibo Post Doc; Current research involves looking for galaxies in the 21cm waveband.
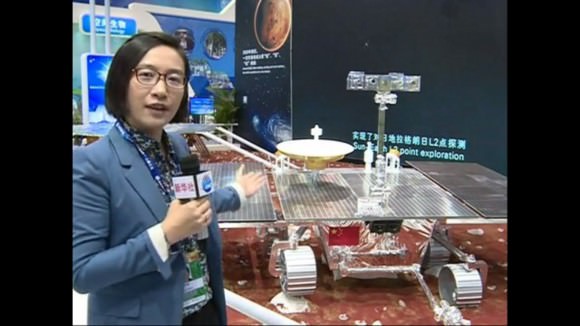
A mock-up of a future Chinese Martian rover was displayed at the International Industry Fair in Shanghai (Credit: South China Morning Post)
For many space-faring nations, ambitions for Mars run broad and deep. Now, add China to the list of countries with Mars in their sights. News reports from China disclosed that country is considering a future Mars rover mission, with a potential 2020 launch date. Additionally came other hints that China may be looking to develop a next-generation heavy-lift launch system.
This new project, while early in development, reveals how Chinese aspirations are growing rapidly. Human space flight successes have been followed by recent lunar mission successes of the Yutu lunar rover and the Chang’e-5 T1 test of a sample return mission. The Chinese Mars missions could influence future plans of ESA, India and NASA or more simply raise the urgency to execute missions in concept or early development without hesitation.
China View reporter Lai Yuchen is seen describing and pointing out the future Sino-Mars rover with plans for a 2020 launch coinciding with the NASA/JPL Mars 2020 rover mission . (Click still image for video Link) (Photo/Video Credit: China View)
The Mars rover mock-up display was presented at the aerospace show by China Aerospace Science and Technology Corporation (CASC). The design appears similar to the Yutu rover which landed successfully on the Moon late in 2013. While Yutu’s mobility system failed prematurely, many mission milestones were achieved.
The Mars rover design is significantly larger than Yutu but includes changes that can be attributed to the challenges of roving Mars at tens of millions of kilometers distance and under more gravitational force. The wheels are beefed up, since it must withstand more force and rugged martian terrain (gravity on Mars is 37% of the Earth’s in strength but 2.25 times the strength of gravity on the Moon’s surface.) The the solar panels are larger due to 1.) less sunlight at Mars – 35% to 50% of Earth’s, and 2.) more electrically demanding instruments.
The goals of the Chinese Mars rover will be to search for life and water. The NASA missions searching for indicators of habitable environments and for water has cost billions of dollars but the Chinese space program is operating on a fraction of what NASA’s annual budget is. Whereas the Chinese Mars program will be competing with the lunar program for government funds, it remains to be seen how quickly they can make progress and actually meet milestones for a 2020 launch date.
Besides video of the China View reporter presenting and discussing the Mars rover (link to photo above), the video also includes a simulation of the Chinese lunar sample return spacecraft, which is underdevelopment and was tested early this month during a the Chang’e-5 T1 circum-lunar mission that proved a small re-entry vehicle.
The future Chinese rover would be nearly as large as the MER rovers. Full scale models of all three NASA/JPL Mars rovers are shown here – Mars Pathfinder, MER and MSL in a JPL Mars yard with engineers. (Photo Credit: NASA/JPL)
The actual dimensions of this rover were not reported but an estimate of the size can be determined by the size of the high-gain directional antenna. Assuming it is an X-Band dish, like the one on the MER Rovers and Curiosity, then this Sino-rover would be near the same size as the MER rovers – Spirit and Opportunity. The Sino-rover shares a six wheel design like MER and MSL rovers.
Other reports from the China Daily indicated that industry leaders in China are urging China’s space agency to develop a more powerful heavy-lift launch system. It could be used for the nation’s human spaceflight goals to send a space station in to orbit, as well as send missions to Mars and beyond.
“It is a must for us to develop a more powerful heavy-lift rocket if we want to reach and explore deep space,” Zhang Zhi, a senior rocket researcher at the China Academy of Launch Vehicle Technology the aerospace exhibition.
Plans also call for an orbiter to likely function as a communication relay as MGS, Mars Odyssey and MRO have done for the American rovers. Whether this would involve a single spacecraft such as the NASA Vikings or dual crafts such as the present American rovers with supporting orbiters is unknown. Given the successful landing of the Yutu rover encapsuled in a soft-lander, one might expect the same for the Chinese Mars rover rather than an airbag landing used by MER. Either way, they will be challenged by the seven minutes of terror just like the American rovers. They will have to solve for themselves the entry, descent and landing of a rover. Only American-made rovers have successfully landed on Mars; all Russian attempts have ended in failure.
The Chinese Lunar Sample Return mission is show in simulation in the China View video. This mission would pave the way for a Chinese Mars sample return by 2030. (Photo Credit: China View)
The presentation also stated future plans for a sample-return mission by 2030. If the first Chineses Mars rover lands successfully in 2020, it will join up to four active rovers on the surface. Curiosity, ExoMars (ESA/NASA), Mars Rover 2020 and MER Opportunity. Six years seems like a long time but MER’s Oppy is a proven trooper having lasted over ten years. Curiosity, barring the unexpected, might last beyond 2020. ExoMars and NASA’s 2020 rover are still in development phases. Using ExoMars or 2020, NASA has plans to recover collected samples from rovers and return them to Earth in the 2020s and possibly as soon as 2022.
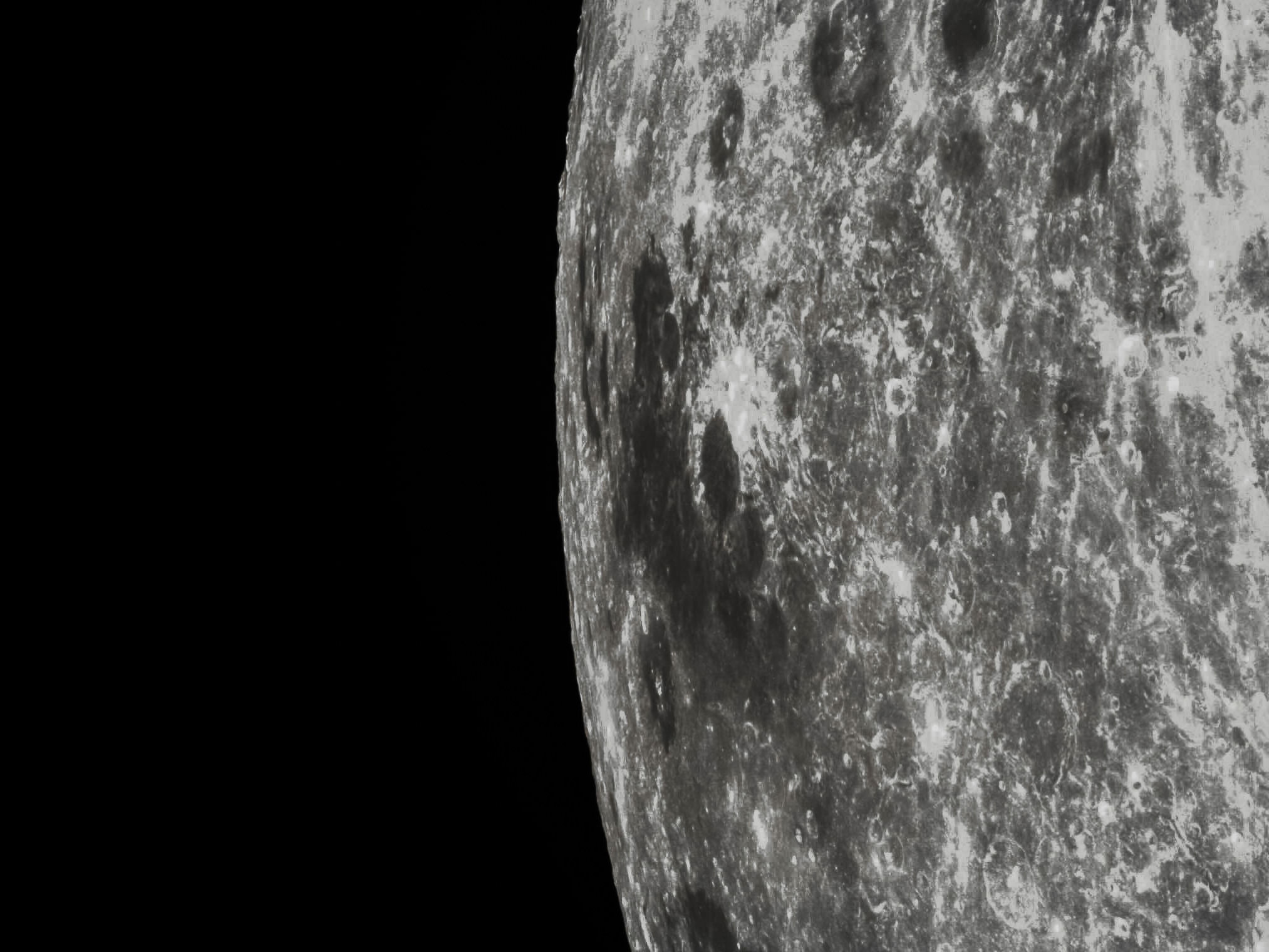
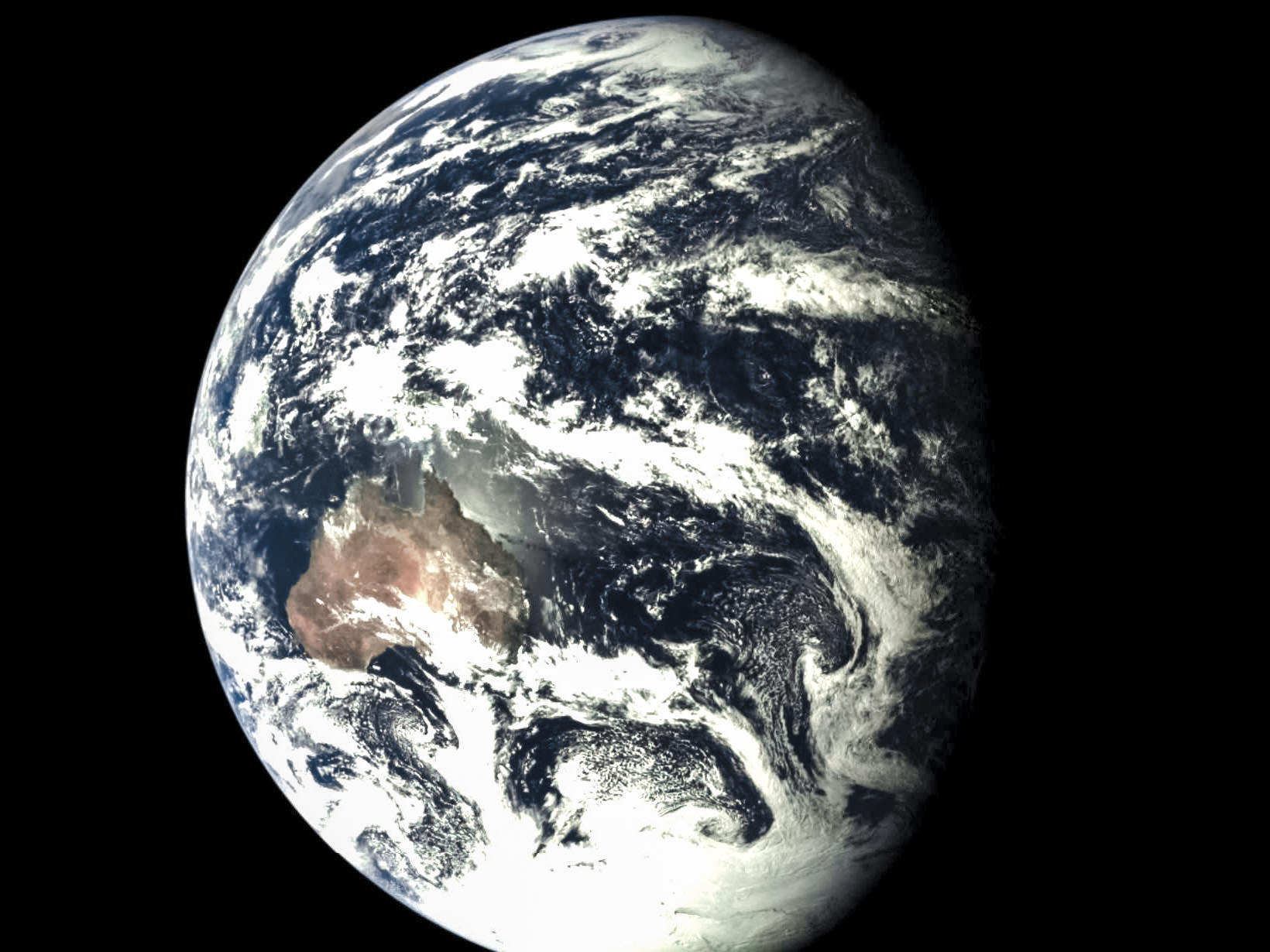
A unique view of the Moon and distant Earth from China's Chang’e-5 T1 lunar test flight. Image via CCTV News and UnmannedSpaceflight.com.
The Chinese lunar test mission Chang’e 5T1 has sent back some amazing and unique views of the Moon’s far side, with the Earth joining in for a cameo in the image above. According to the crew at UnmannedSpaceflight.com the images were taken with the spacecraft’s solar array monitoring camera.
Add this marvelous shot to previous views of the Earth and Moon together.
A closeup of Mare Marginis, a lunar sea that lies on the very edge of the lunar nearside. Credit: Xinhua News, via UnmannedSpacefight.com.
The mission launched on October 23 and is taking an eight-day roundtrip flight around the Moon and is now journeying back to Earth. The mission is a test run for Chang’e-5, China’s fourth lunar probe that aims to gather samples from the Moon’s surface, currently set for 2017. Chang’e 5T1 will return to Earth on October 31.
The test flight orbit had a perigee of 209 kilometers and reached an apogee of about 380,000 kilometers, swinging halfway around the Moon, but did not enter lunar orbit.
A view of Earth on October 24, 2014, from the Chinese Chang’e-5 T1 spacecraft. Credit: Xinhua News, via UnmannedSpaceflight.com.
Liftoff of the unmanned Chang'e-5 T1 lunar spacecraft atop a Long March-3C rocket from the Xichang Satellite Launch Center in China on Oct. 24, 2014, BJT (Oct. 23 EDT). Credit: Xinhua/Jiang Hongjing
China launched a robotic mission to the Moon today (Oct. 23 EDT/Oct. 24 BJT) that will test a slew of key technologies required for safely delivering samples gathered from the Moon’s surface and returning them to Earth later this decade for analysis by researchers.
Today’s unmanned launch of what has been dubbed “Chang’e-5 T1” is a technology testbed serving as a precursor for China’s planned Chang’e-5 probe, a future mission aimed at conducting China’s first lunar sample return mission in 2017.
“Chang’e-5 T1” was successfully launched atop an advanced Long March-3C rocket at 2 AM Beijing local time (BJT), 1800 GMT, from the Xichang Satellite Launch Center in China’s southwestern Sichuan Province.
“The test spacecraft separated from its carrier rocket and entered the expected the orbit shortly after the liftoff, according to the State Administration of Science, Technology and Industry for National Defense (SASTIND),” says the official Xinhua news agency. The launch was not broadcast live.
The return capsule was placed on a lunar transfer trajectory that will take it on a simple eight day roundtrip flight around the Moon and journey back to Earth. The orbit had a perigee of 209 kilometers and will reach an apogee of some 380,000 kilometers and swing halfway around the Moon, but not enter lunar orbit.
Ignition and liftoff of the unmanned Chang’e-5 T1 lunar spacecraft atop a Long March-3C rocket from the Xichang Satellite Launch Center in China on Oct. 24, 2014, BJT (Oct. 23 EDT). Credit: Xinhua/Jiang Hongjing
The probe was developed by the China Aerospace Science and Technology Corporation. The service module is based on China’s earlier Chang’e-2 spacecraft and the capsule somewhat resembles a mini-Shenzhou.
On its return, the probe will hit the Earth’s atmosphere at about 11.2 kilometers per second for reentry and a parachute assisted landing. The capsule is targeted to soft land in north China’s Inner Mongolia Autonomous Region.
The goal is to test and validate guidance, navigation and control, heat shield, and trajectory design technologies required for the sample return capsule’s safe re-entry following a lunar touchdown mission and collection of soil and rock samples from the lunar surface – planned for the Chang’e-5 mission.
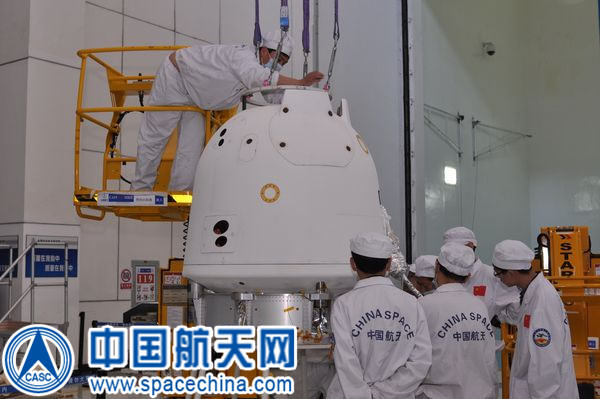
Technicians at work testing the Chang’e-5 T1 return capsule. Credit: China Aerospace Science and Technology Corporation/ Spacechina.com
China hopes to launch the Chang’e-5 mission in 2017 as the third step in the nation’s ambitious lunar exploration program.
The first step involved a pair of highly successful lunar orbiters named Chang’e-1 and Chang’e-2 which launched in 2007 and 2010, respectively.
The second step involved the hugely successful Chang’e-3 mothership lander and piggybacked Yutu moon rover which safely touched down on the Moon at Mare Imbrium (Sea of Rains) on Dec. 14, 2013 – marking China’s first successful spacecraft landing on an extraterrestrial body in history, and chronicled extensively in my reporting here.
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
See below our time-lapse photo mosaic showing China’s Yutu rover dramatically trundling across the Moon’s stark gray terrain in the first weeks after she rolled all six wheels onto the desolate lunar plains.
360-degree time-lapse color panorama from China’s Chang’e-3 lander This 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at three different positions during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013, during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
The complete time-lapse mosaic shows Yutu at three different positions trekking around the landing site, and gives a real sense of how it maneuvered around on its 1st Lunar Day.
The 360 degree panoramic mosaic was created by the imaging team of scientists Ken Kremer and Marco Di Lorenzo from images captured by the color camera aboard Chang’e-3 lander and was featured at Astronomy Picture of the Day (APOD) on Feb. 3, 2014.
Although Yutu was initially very successful, it encountered difficulties about six weeks after rolling onto the surface which prevented it from roving further across the surface and accomplishing some of its science objectives.
China’s space officials are currently evaluating whether they will proceed with launching the Chang’e-4 lunar landing mission in 2016, which was a backup probe to Chang’e-3.
China is pushing forward with plans to start building a manned space station later this decade and considering whether to launch astronauts to the Moon by the mid 2020s or later.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
As you can see in the video above, the new panorama shows the Chang’e-3 lander and the tracks of the Yutu rover in the Mare Imbrium (Sea of Rains). The duo landed on the Moon on Dec. 14, 2013, with the rover on the top. Yutu then drove on its six wheels on to the surface only about seven hours after the touchdown happened.
The act was hailed as an accomplishment for China, which is the third nation to make a soft landing on the moon after the Soviet Union and the United States. It also was the first to touch down on the moon in more than a generation, as other lunar programs have focused on orbiters (such as NASA’s Lunar Reconnaissance Orbiter, which remains in operation above.)
According to the Twitter account UHF Satcom, the X-band carrier signal for Yutu was strongly audible from Earth yesterday (Sept. 7), although the lander was not audible.
Yutu Rover is back! X-Band carrier loud and clear – amazing! FFT @ http://t.co/JZaYaAYpjg No signals from Chang’e’3 lander though.
Chang’e-3/Yutu Timelapse Color Panorama This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com.
See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm[/caption]
KENNEDY SPACE CENTER, FL – China’s maiden moon rover Yutu awoke from her regular two week long slumber on Friday, March 14, to begin the 4th Lunar Day since the probes history making touchdown on the surface of Earth’s nearest neighbor in mid December 2013.
But the endearing robot is still ailing and suffering from mechanical control issues that popped up in late January 2014 according to Chinese space officials.
The Chang’e-3 mothership lander that deposited Yutu onto the pockmarked lunar surface also awoke two days earlier on Wednesday, March 12.
“Yutu and the lander have restarted their operations and are exploring as scheduled,” according to China’s State Administration of Science, Technology and Industry for National Defence (SASTIND), responsible for executing the Chang’e-3 mission.
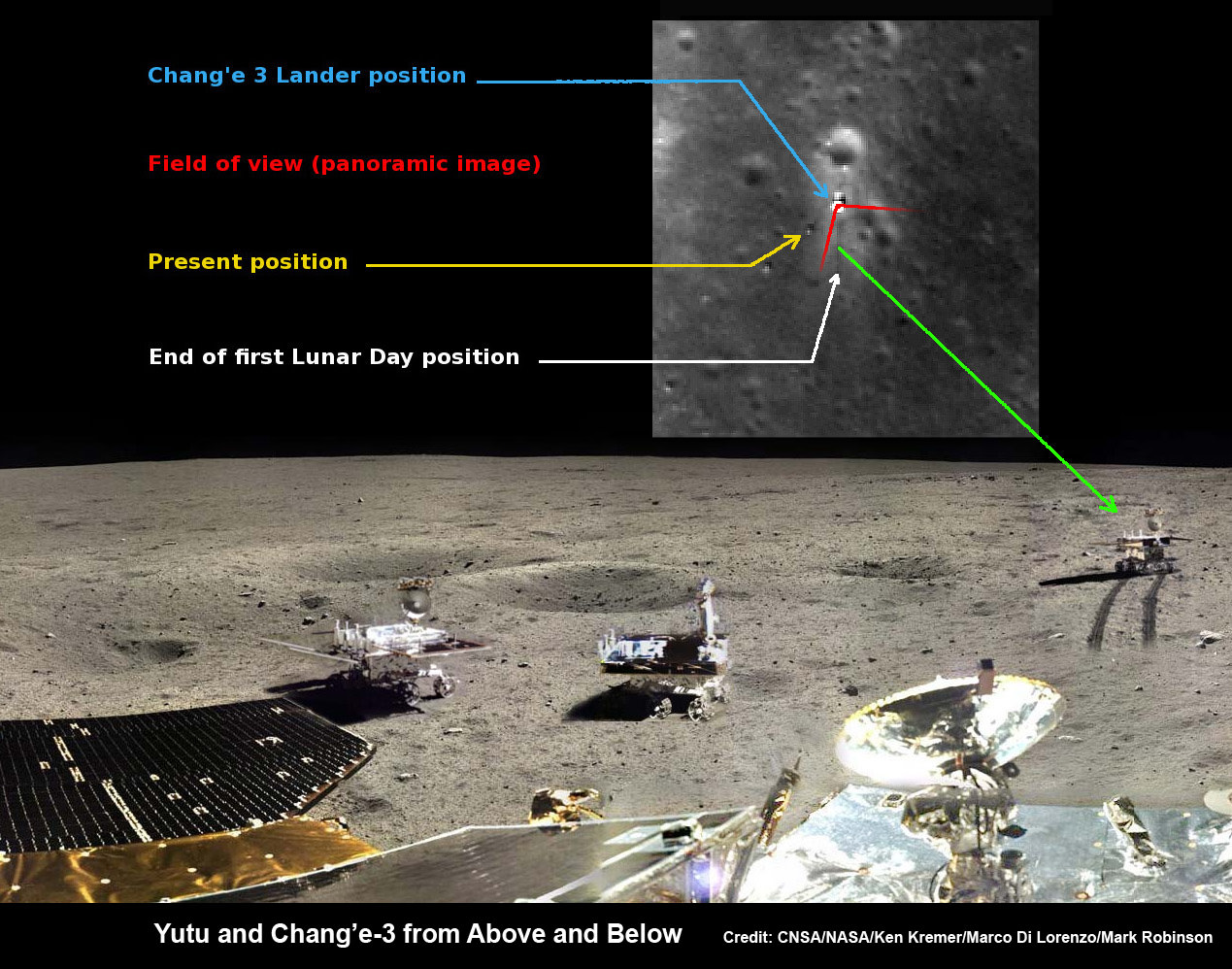
Yutu rover drives around Chang’e-3 lander – from Above And Below. Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
However, “the control issues that have troubled Yutu since January remain,” says China’s government owned Xinhua news agency.
The hugely popular ‘Yutu’ rover is still suffering from an inability to maneuver its life giving solar panels. It is also unable to activate its six wheels and move around the surface – as I reported here.
At the time that Yutu’s 2nd Lunar sleep period began on Jan. 25, 2014, Chinese space officials had announced that the robot’s future was in jeopardy after it suffered an unidentified “ mechanical control anomaly” due to the “complicated lunar surface.”
360-degree time-lapse color panorama from China’s Chang’e-3 lander
This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
Earlier this month, China announced that “Yutu suffered a control circuit malfunction in its driving unit.”
“The control circuit problem prevented Yutu from entering the second dormancy as planned,” said Ye Peijian, chief scientist of the Chang’e-3 program, in an exclusive interview with Xinhua.
A functioning control circuit is required to lower the rovers mast and protect the delicate components and instruments mounted on the mast from directly suffering from the extremely harsh cold of the Moon’s recurring night time periods.
“Normal dormancy needs Yutu to fold its mast and solar panels,” said Ye according to CCTV, China’s state run broadcaster.
Fortunately, the panoramic camera, radar and other sciene instruments and equipment are functioning normally, says SASTIND.
Yutu even snapped at least a pair new images of the lander during Lunar Day 3.
See our mosaic of Yutu’s Lunar Day 3 lander image as well as our the complete 360 degree timelapse color panorama from Lunar Day 1 herein and at NASA APOD on Feb. 3, 2014 – assembled by Marco Di Lorenzo and Ken Kremer.
Mosaic of the Chang’e-3 moon lander and the lunar surface taken by the camera on China’s Yutu moon rover from a position south of the lander during Lunar Day 3. Note the landing ramp and rover tracks at left. Credit: CNSA/SASTIND/Xinhua/Marco Di Lorenzo/Ken Kremer
By reawakening on March 14, the 140 kg robot also survived for its three month design lifetime on the moon.
Yutu’s goal is to accomplish a roving expedition to investigate the moon’s surface composition and natural resources.
So far the 1200 kg Chang’e-3 lander is functioning as planned during its first three lunar days, says SASTIND.
“The lander’s optical telescope, extreme ultraviolet camera and lunar dust measurement device completed scheduled tasks and obtained a large amount of data,” says China’s government owned Xinhua news agency.
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF astro/space convention on April 12/13.

 Host: Fraser Cain (@fcain)
Host: Fraser Cain (@fcain)