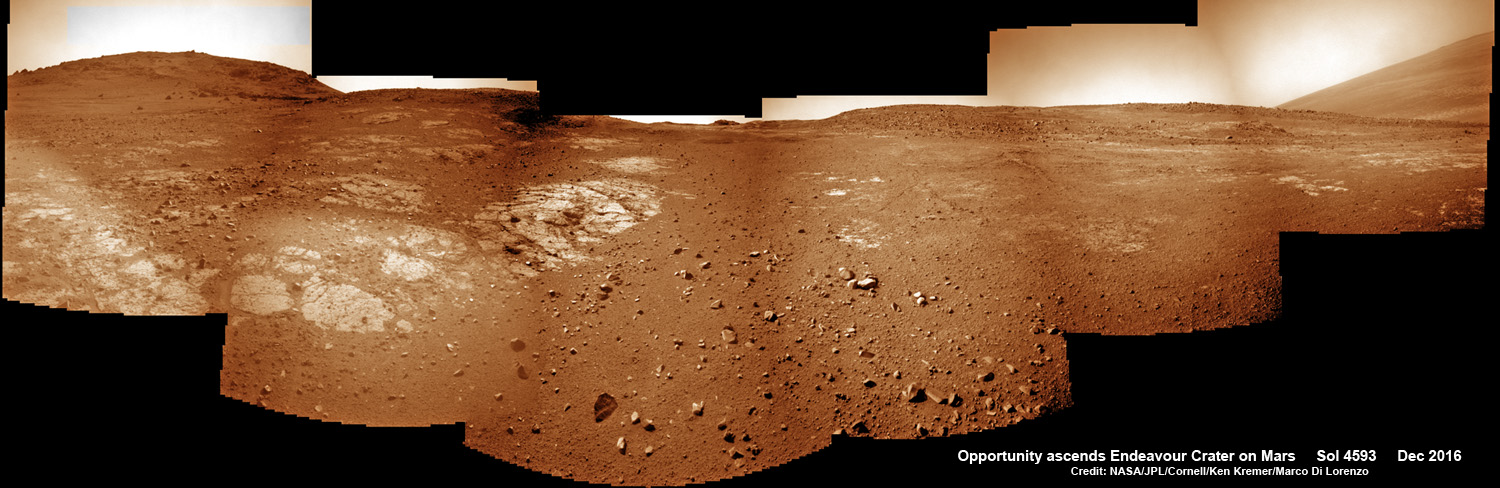
NASA’s Opportunity rover scans around and across to vast Endeavour crater on Dec. 19, 2016, as she climbs steep slopes on the way to reach a water carved gully along the eroded craters western rim. Note rover wheel tracks at center. This navcam camera photo mosaic was assembled from raw images taken on Sol 4587 (19 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Opportunity rover scans around and across to vast Endeavour crater on Dec. 19, 2016, as she climbs steep slopes on the way to reach a water carved gully along the eroded craters western rim. Note rover wheel tracks at center. This navcam camera photo mosaic was assembled from raw images taken on Sol 4587 (19 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
On the brink of 4600 Sols of a profoundly impactful life, NASA’s long lived Opportunity rover celebrates the Christmas/New Year’s holiday season on Mars marching relentlessly towards an ancient water carved gully along the eroded rim of vast Endeavour crater – the next science target on her heroic journey traversing across never before seen Red Planet terrains.
“Opportunity is continuing its great 21st century natural history expedition on Mars, exploring the complex geology and record of past climate here on the rim of the 22-km Endeavour impact crater,” writes Larry Crumpler, a science team member from the New Mexico Museum of Natural History & Science, in a mission update.
Indeed, New Years Day 2017 equates to 4600 Sols, or Martian Days – of boundless exploration and epic discovery by the longest living Martian rover ever dispatched by humanity to survey the most Earth-like planet in our solar system.
One can easily imagine our beloved Princess Leia gazing quite proudly upon the feistiness and resourcefulness of this never-give-up Martian Princess rover – climbing steeply uphill no less – nearly 13 YEARS into her 3 MONTH mission!!
“Not a boring flat terrain, but heroically rugged terrain,” says Crumpler.
“Hopefully the brakes are good! For a rover that originally landed 12 years ago on what amounts to a flat parking lot, the current terrain is about as different and rugged as any mountain goat rover could handle.”
Indeed she is 51 times beyond her “warrantied” life expectancy of merely 90 Sols roving the surface of the 4th rock from the Sun during her latest extended mission. (And this time round, the clueless Washington bean counters did not even dare threaten to shut her down – lest they suffer the wrath of a light saber or sister Curiosity’s laser canon !!).
Check out the glorious view from Opportunity’s current Martian holiday season exploits in our newest photo mosaics created by the imaging team of Ken Kremer and Marco Di Lorenzo.
“Opportunity has begun the ascent of the steep slopes here in the inner wall of Endeavour impact crater after completion of a survey of outcrops close to the crater floor. The goal now is to climb back to the rim where the terrain is less hazardous, drive south quickly about 1 km south, and arrive at the next major mission target on the rim before the next Martian winter,” Crumpler elaborated.
On Christmas Day 2016, NASA’s Opportunity rover scans around vast Endeavour crater as she ascends steep rocky slopes on the way to reach a water carved gully along the eroded craters western rim. This navcam camera photo mosaic was assembled from raw images taken on Sol 4593 (25 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
After surviving the scorching ‘6 minutes of Terror’ plummet through the thin Martian atmosphere, Opportunity bounced to an airbag cushioned landing on the plains of Meridiani Planum on January 24, 2004 – nearly 13 years ago!
Opportunity was launched on a Delta II rocket from Cape Canaveral Air Force Station in Florida on July 7, 2003.
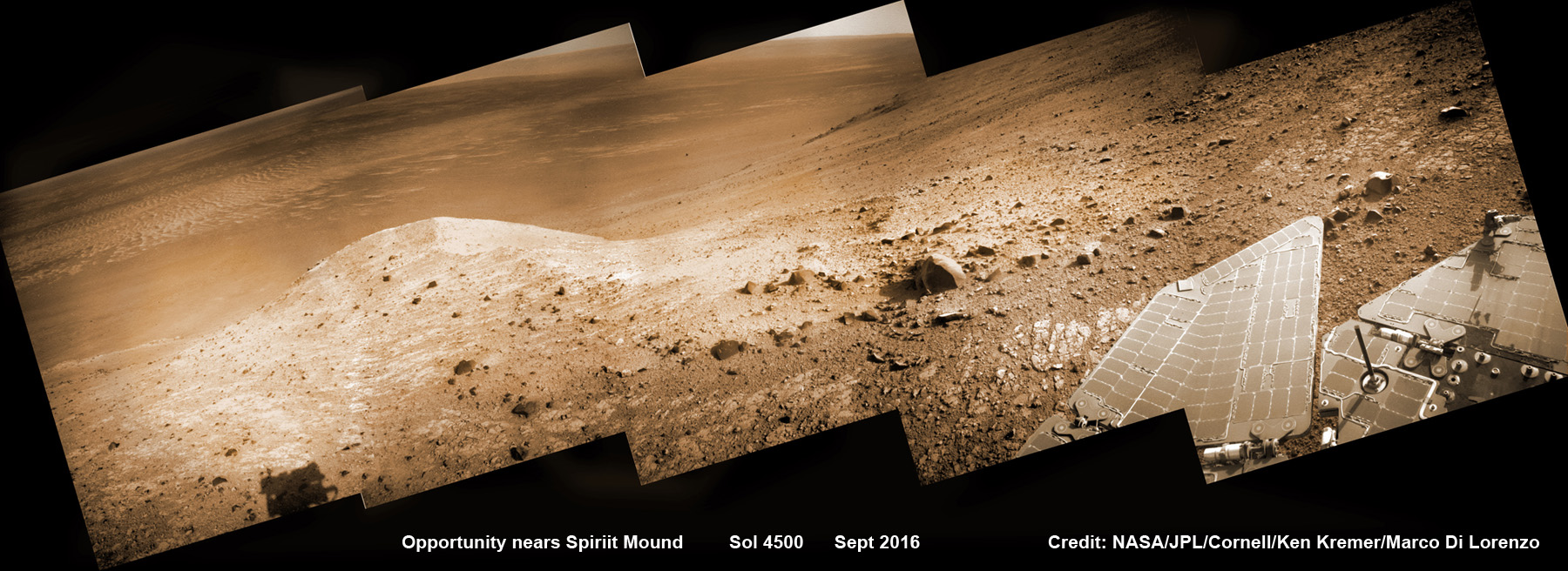
NASA’s Opportunity rover scans ahead to Spirit Mound and vast Endeavour crater as she celebrates 4500 sols on the Red Planet after descending down Marathon Valley. This navcam camera photo mosaic was assembled from raw images taken on Sol 4500 (20 Sept 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
The newest 2 year extended mission phase just began on Oct. 1, 2016 as the six wheeled robot was stationed at the western rim of Endeavour crater at the bottom of Marathon Valley at a spot called “Bitterroot Valley” and completing investigation of nearby “Spirit Mound.”
She is now ascending back up to the top of the crater rim for the southward trek to ‘the gully’ in 2017.
“Opportunity is making progress towards the next science objective of the extended mission,” researchers leading the Mars Exploration Rover (MER) Opportunity mission wrote in a status update.
“The rover is headed toward an ancient water-carved gully about a kilometer south of the rover’s current location on the rim of Endeavour Crater.”
Endeavour crater spans some 22 kilometers (14 miles) in diameter.
Opportunity has been exploring Endeavour since arriving at the humongous crater in 2011. Endeavour crater was formed when it was carved out of the Red Planet by a huge meteor impact billions of years ago.
“Endeavour crater dates from the earliest Martian geologic history, a time when water was abundant and erosion was relatively rapid and somewhat Earth-like,” Crumpler explains.
“So in addition to exploring the geology of a large crater, a type of feature that no one has ever explored in its preserved state, the mission seeks to take a close look at the evidence in the rocks for the past environment. Thus we are trying to stick to the crater rim where the oldest rocks are.”
But the crater slopes ahead are steep! As much as 20 degrees and more – and thus potentially dangerous! So the team is commanding Opportunity to proceed ahead with caution to “the gully” which is the primary target of her latest extended mission.
The rover has even done “quite a bit of exploratory driving in an effort to attain a good vantage point for finding a path through a troubling area of boulder patch and steep slopes ahead. The concern was whether the available routes to avoid the boulders were all too steep to traverse, in which case we would have to forgo the current ‘Extended Mission 10’ (EM10) route and backtrack to find a different route to our main objective, the ‘gully.’”
“The slopes here exceed 20 degrees and the surface consists of flat outcrops of impact breccias covered with tiny rocks that act like ball bearings,” Crumpler writes. “Anyone who has attempted to walk on a 20 degree slope with a covering of fine pebbles on hard outcrop can attest to the difficulty. Opportunity has been operating at these extreme slope for several months. But going down hill is one thing, And going back up hill is another entirely.”
NASA’s Opportunity rover discovers a beautiful Martian dust devil moving across the floor of Endeavour crater as wheel tracks show robots path today exploring the steepest ever slopes of the 13 year long mission, in search of water altered minerals at Knudsen Ridge inside Marathon Valley on 1 April 2016. This navcam camera photo mosaic was assembled from raw images taken on Sol 4332 (1 April 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of today, Sol 4598, Dec. 29, 2016, Opportunity has taken over 215,900 images and traversed over 27.12 miles (43.65 kilometers) – more than a marathon.
See our updated route map below.
The rover surpassed the 27 mile mark milestone early last month on November 6 (Sol 4546).
The power output from solar array energy production is currently 414 watt-hours, before heading into another southern hemisphere Martian winter in 2017.
Meanwhile Opportunity’s younger sister rover Curiosity traverses and drills into the lower sedimentary layers at the base of Mount Sharp.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
13 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2016. This map shows the entire 43 kilometer (27 mi) path the rover has driven on the Red Planet during nearly 13 years and more than a marathon runners distance for some 4600 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater. After descending down Marathon Valley and after studying Spirit Mound, the rover is now ascending back uphill on the way to a Martian water carved gully. Rover surpassed Marathon distance on Sol 3968 after reaching 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and searched for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
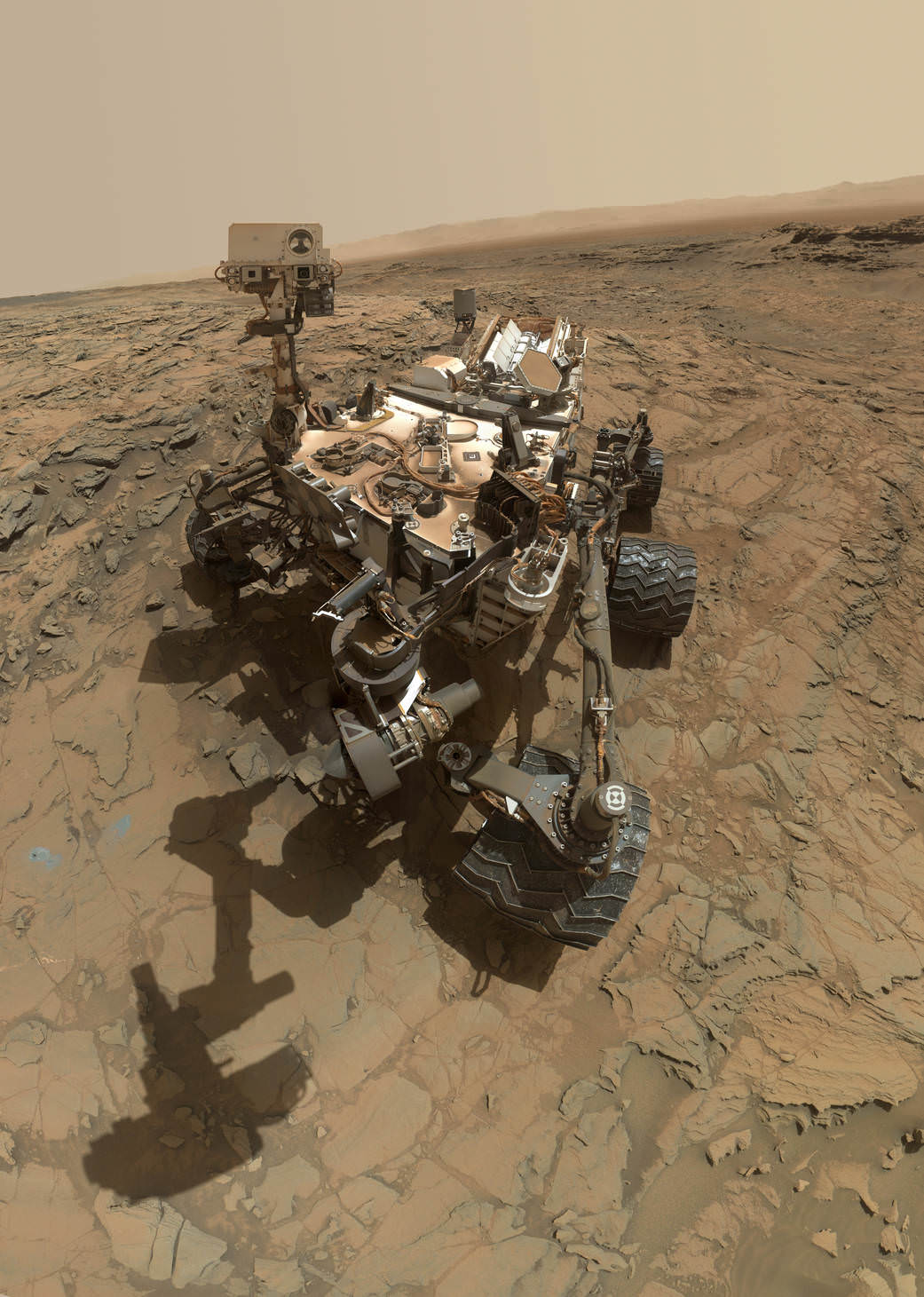
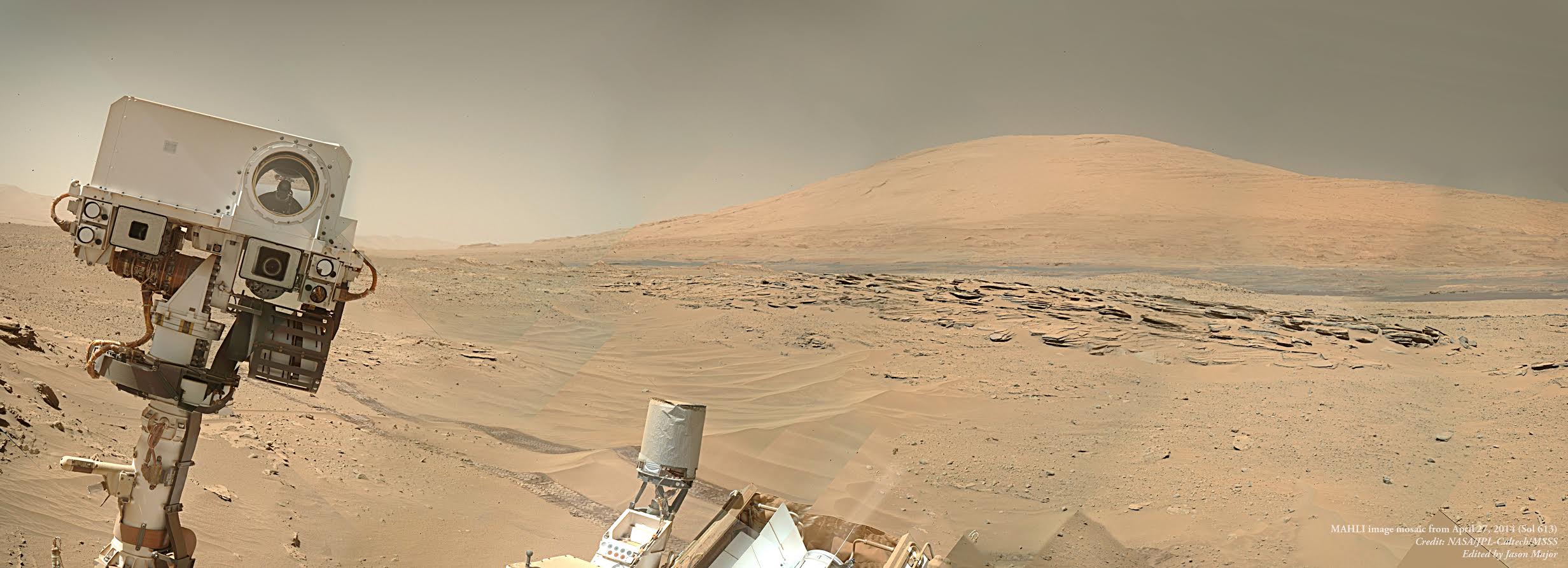
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
Following is the final excerpt from my new book, “Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos.” The book is an inside look at several current NASA robotic missions, and this excerpt is part 3 of 3 posted here on Universe Today, of Chapter 2, “Roving Mars with Curiosity.” You can read Part 1 here, and Part 2 here. The book is available in print or e-book (Kindle or Nook) Amazon and Barnes & Noble.
How to Drive a Mars Rover
How does Curiosity know where and how to drive across Mars’ surface? You might envision engineers at JPL using joysticks, similar to those used for remote control toys or video games. But unlike RC driving or gaming, the Mars rover drivers don’t have immediate visual inputs or a video screen to see where the rover is going. And just like at the landing, there is always a time delay of when a command is sent to the rover and when it is received on Mars.
“It’s not driving in a real-time interactive sense because of the time lag,” explained John Michael Morookian, who leads the team of rover drivers.
The actual job title of Morookian and his team are ‘Rover Planners,’ which precisely describes what they do. Instead of ‘driving’ the rovers per se; they plan out the route in advance, program specialized software, and upload the instructions to Curiosity.
“We use images taken by the rover of its surroundings,” said Morookian. “We have a set of stereo images from four black-and-white Navigation Cameras, along with images from the Hazcams (hazard avoidance cameras), supported by high-resolution color images from the MastCam that give us details about the nature of the terrain ahead and clues about types of rocks and minerals at the site. This helps identify structures that look interesting to the scientists.”
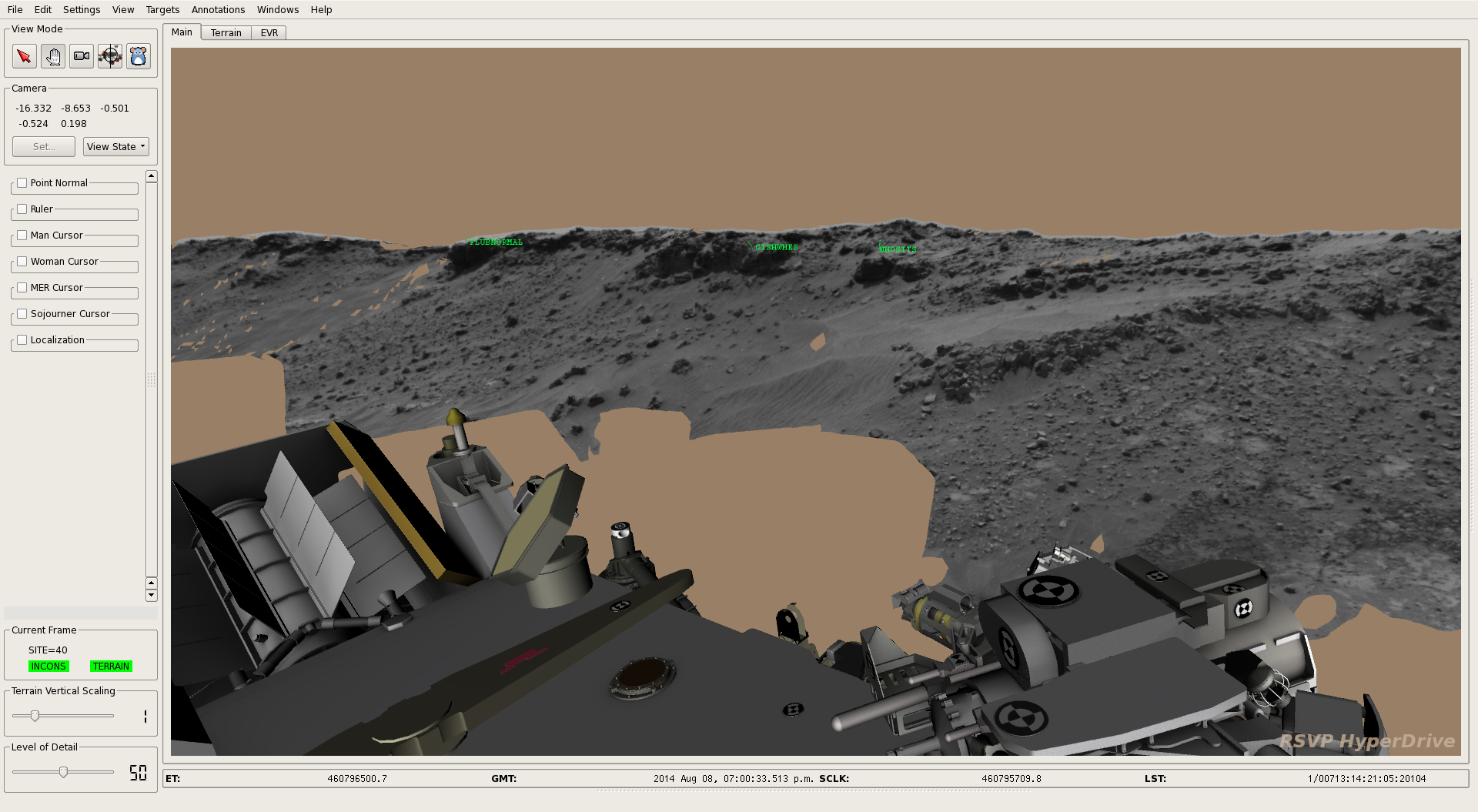
Using all available data, they can create a three-dimensional visualization of the terrain with specialized software called the Rover Sequencing and Visualization Program (RSVP).
“This is basically a Mars simulator and we put a simulated Curiosity in a panorama of the scene to visualize how the rover could traverse on its path,” Morookian explained. “We can also put on stereo glasses, which allow our eyes to see the scene in three dimensions as if we were there with the rover.
In virtual reality, the rover drivers can manipulate the scene and the rover to test every possibility of which routes are the best and what areas to avoid. There, they can make all the mistakes (get stuck in a dune, tip the rover, crash into a big rock, drive off a precipice) and perfect the driving sequence while the real rover remains safe on Mars.
“The scientists also review the images for features that are interesting and consult with the Rover Planners to help define a path. Then we compose the detailed commands that are necessary to get Curiosity from Point A to Point B along that path,” Morookian said. “”We can also incorporate the commands needed to give the rover direction to make contact with the site using its robotic arm.”
When Curiosity’s Navigation Cameras (Navcams) take black-and-white images and send them back to Earth each day, rover planners combine them with other rover data to create 3D terrain models. By adding a computerized 3D rover model to the terrain model, rover planners can understand better the rover’s position, as well as distances to, and scale of, features in the landscape. Credit: NASA/JPL-Caltech.
So, every night the rover is commanded to shut down for eight hours to recharge its batteries with the nuclear generator. But first Curiosity sends data to Earth, including pictures of the terrain and any science information. On Earth, the Rover Planners take that data, do their planning work, complete the software programing and beam the information back to Mars. Then Curiosity wakes up, downloads the instructions and sets to work. And the cycle repeats.
Curiosity also has an AutoNav feature which allows the rover to traverse areas the team hasn’t seen yet in images. So, it could go over the hill and down the other side to uncharted territory, with the AutoNav sensing potential hazards.
“We don’t use it too often because it is computationally expensive, meaning it takes much longer for the rover to operate in that mode,” Morookian said. “We often find it’s a better trade to just come in the next day, look at the images and drive as far as we can see.”
A view of the Space Flight Operations Facility at the Jet Propulsion Laboratory, where all the data going both to and from all planetary missions is sent and received via the Deep Space Network. Credit: Nancy Atkinson.
As Morookian showed me the various rooms used by rover planning teams at JPL, he explained how they need to operate over a number of different timescales.
“We not only have the daily route planning,” he said, “but also do long-range strategic planning using orbital imagery from the HiRISE camera on the Mars Reconnaissance Orbiter and choose paths based on features seen from orbit. Our team works strategically, looking many months out to define the best paths.”
Another process called Supra-Tactical looks out to just the next week. This involves science planners managing and refining the types of activities the rover will be doing in the short term. Also, since no one on the team lives on Mars Time anymore, on Fridays the Rover Planners work out the plans for several days.
“Since we don’t work weekends, Friday plans contain multiple sols of activities,” Morookian said. “Two parallel teams decide which days the rover will drive and which days it will do other activities, such as work with the robotic arm or other instruments.”
The data that comes down from the rover over the weekend is monitored, however, and if there is a problem, a team is called in to do a more detailed assessment. Morookian indicated they’ve had to engage the emergency weekend team several times, but so far there have been no serious problems. “It does keep us on our toes, however,” he said.
The rover features a number of reactive safety checks on the amount of overall tilt of the rover deck and the articulation of the suspension system of the wheels, so if the rover is going over an object that is too large, it will automatically stop.
Curiosity wasn’t built for speed. It was designed to travel up to 660 feet (200 meters) in a day, but it rarely travels that far in a Sol. By early 2016 the rover had driven a total of about 7.5 miles (12 km) across Mars’ surface.
This image shows a close-up of track marks left by the Curiosity rover. Holes in the rover’s wheels, seen here in this view, leave imprints in the tracks that can be used to help the rover drive more accurately. The imprint is Morse code for ‘JPL,’ and aids in tracking how far the rover has traveled. Credit: NASA/JPL-Caltech.
There are several ways to determine how far Curiosity has traveled, but the most accurate measurement is called ‘Visual Odometry.’ Curiosity has specialized holes in its wheels in the shape of Morse code letters, spelling out ‘JPL’ – a nod to the home of the rover’s science and engineering teams – across the Martian soil.
“Visual odometry works by comparing the most recent pair of stereo images collected roughly every meter over the drive,” said Morookian. “Individual features in the scene are matched and tracked to provide a measure of how the camera (and thus the rover) has translated and rotated in 3 dimensional space between the two images and it tells us in a very real sense how far Curiosity has gone.”
Careful inspection of the rover tracks can reveal the type of traction the wheels have and if they have slipped, for instance due to high slopes or sandy ground.
Unfortunately, Curiosity now has new holes in its wheels that aren’t supposed to be there.
Rover Problems
Morookian and Project Scientist Ashwin Vasavada both expressed relief and satisfaction that overall — this far into the mission — Curiosity is a fairly healthy rover. The entire science payload is currently operating at nearly full capability. But the engineering team keeps an eye on a few issues.
“Around sol 400, we realized the wheels were wearing faster than we expected,” Vasavada said.
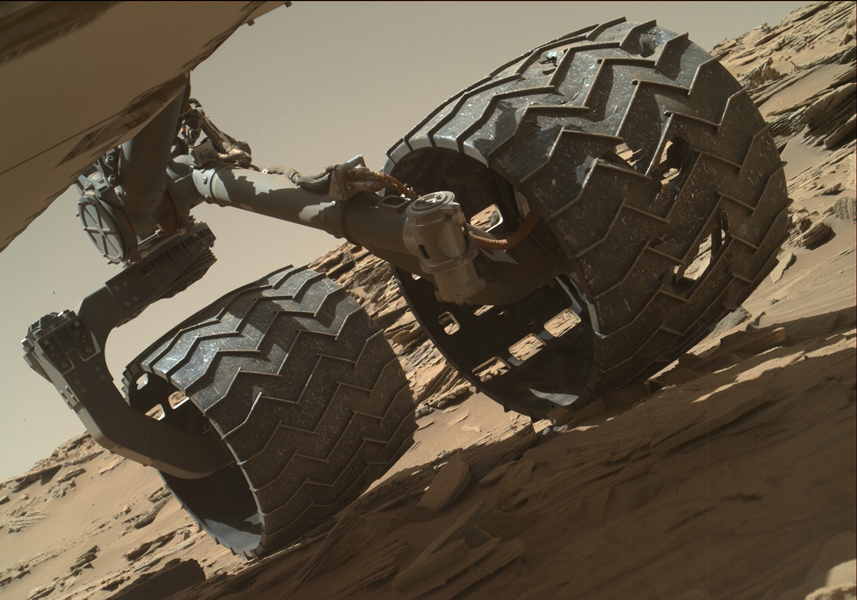
The team operating the Curiosity Mars rover uses the Mars Hand Lens Imager (MAHLI) camera on the rover’s arm to check the condition of the wheels at routine intervals. This image of Curiosity’s left-middle and left-rear wheels is part of an inspection set taken on April 18, 2016, during the 1,315th sol of the rover’s work on Mars. Credit: NASA/JPL-Caltech/MSSS.
And the wear didn’t consist of just little holes; the team started to see punctures and nasty tears. Engineers realized the holes were being created by the hard, jagged rocks the rover was driving over during that time.
“We weren’t fully expecting the kind of ‘pointy’ rocks that were doing damage,” Vasavada said. “We also did some testing and saw how one wheel could push another wheel into a rock, making the damage worse. We now drive more carefully and don’t drive as long as we have in the past. We’ve been able to level off the damage to a more acceptable rate.”
Early in the mission, Curiosity’s computer went into ‘safe mode’ several times, as Curiosity’s software recognized a problem, and the response was to disallow further activity and phone home.
Specialized fault protection software runs throughout the modules and instruments, and when a problem occurs, the rover stops and sends data called ‘event records’ to Earth. The records include various categories of urgency, and in early 2015, the rover sent a message that essentially said, “This is very, very bad.” The drill on the rover’s arm had experienced a fluctuation in an electrical current – like a short circuit.
“Curiosity’s software has the ability to detect shorts, like the ground fault circuit interrupter you have in your bathroom,” Morookian explained, “except this one tells you ‘this is very, very bad’ instead of just giving you a yellow light.”
Since the team can’t go to Mars and repair a problem, everything is fixed either by sending software updates to the rover or by changing operational procedures.
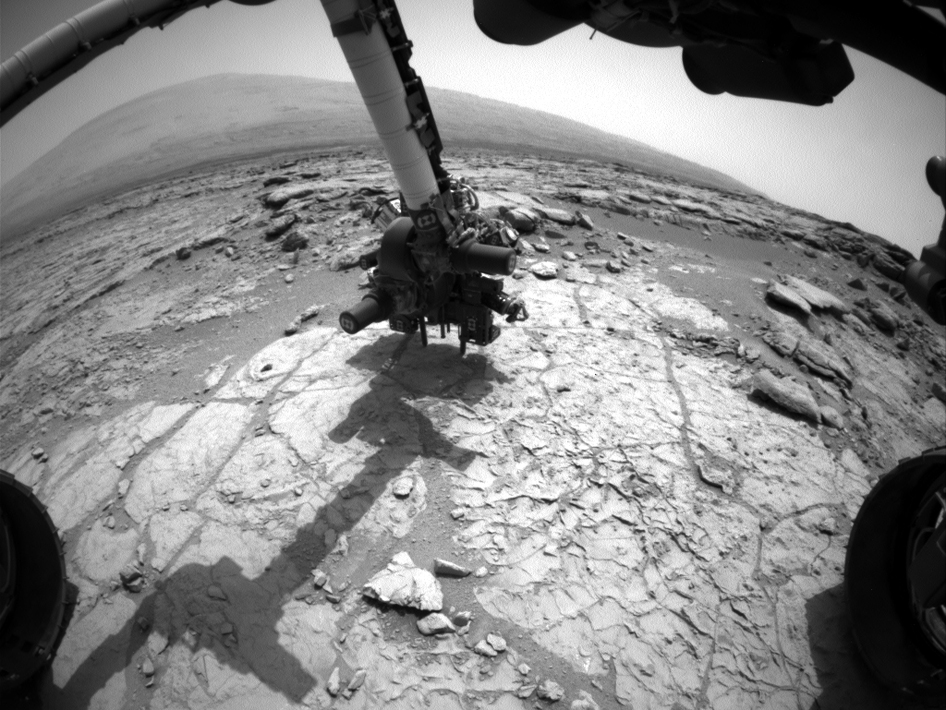
Curiosity’s drill in the turret of tools at the end of the robotic arm positioned in contact with the rock surface for the first drilling of the mission on the 170th sol of Curiosity’s work on Mars (Jan. 27, 2013) in Yellowknife Bay. The picture was taken by the front Hazard-Avoidance Camera (Hazcam). Image credit: NASA/JPL-Caltech.
“We are just more careful now with how we use the drill,” Vasavada said, “and don’t drill with full force at the beginning, but slowly ramp up. It’s sort of like how we drive now, more gingerly but it still gets the job done. It hasn’t been a huge impact as of yet.”
A lighter touch on the drill also was necessary for the softer mudstones and sandstones the rover encountered. Morookian said there was concern the layered rocks might not hold up under the assault of the standard drilling protocol, and so they adjusted the technique to use the lowest ‘settings’ that still allows the drill to make sufficient progress into the rock.
But opportunities to use the drill are increasing as Curiosity begins its traverse up the mountain. The rover is traveling through what Vasavada calls a “target rich, very interesting area,” as the science team works to tie together the geological context of everything they are seeing in the images.
Finding Balance on Mars
While the diversion at Yellowknife Bay allowed the team to make some major discoveries, they felt pressure to get to Mt. Sharp, so “drove like hell for a year,” Vasavada said.
Now on the mountain, there is still the pressure to make the most of the mission, with the goal of making it through at least four different rock units – or layers — on Mt. Sharp. Each layer could be like a chapter in the book of Mars’ history.
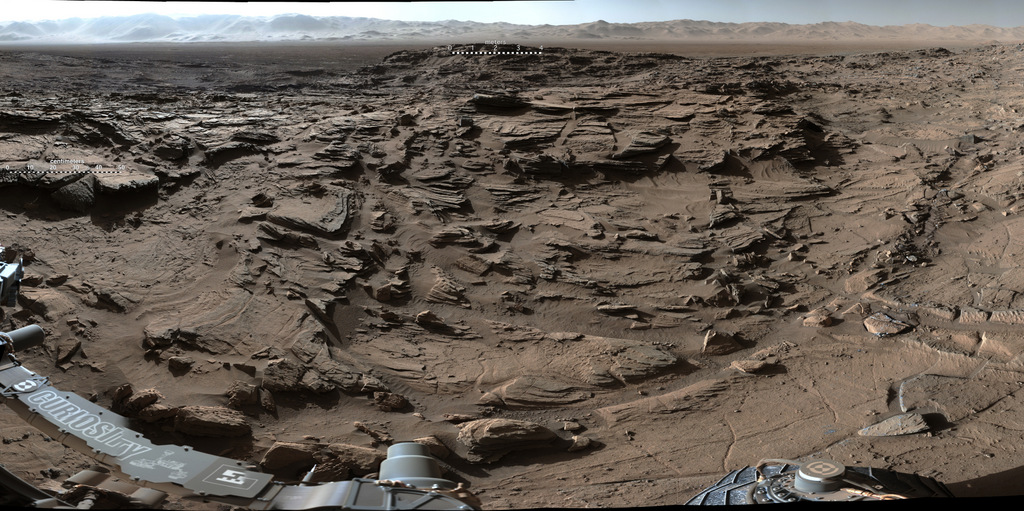
A portion of a panorama from Curiosity’s Mastcam shows the rugged surface of ‘Naukluft Plateau’ plus part of the rim of Gale Crater, taken on April 4, 2016 or Sol 1301. Credit: NASA/JPL-Caltech/MSSS
“Exploring Mt. Sharp is fascinating,” Vasavada said, “and we’re trying to maintain a mix between really great discoveries, which – you hate to say — slows us down, and getting higher on the mountain. Looking closely at a rock in front of you means you’ll never be able to go over and look at that other interesting rock over there.”
Vasavada and Morookian both said it’s a challenge to preserve that balance every day — to find what’s called the ‘knee in the curve’ or ‘sweet spot’ of the perfect optimization between driving and stopping for science.
Then there’s the balance between stopping to do a full observation with all the instruments and doing ‘flyby science’ where less intense observations are made.
“We take the observations we can, and generate all the hypotheses we can in real time,” Vasavada said. “Even if we’re left with 100 open questions, we know we can answer the questions later as long as we know we’ve taken enough data.”
Curiosity’s primary target is not the summit, but instead a region about 1,330 feet (400 meters) up where geologists expect to find the boundary between rocks that saw a lot of water in their history, and those that didn’t. That boundary will provide insight into Mars’ transition from a wet planet to dry, filling in a key gap in the understanding of the planet’s history.
he Curiosity rover recorded this view of the Sun setting at the close of the mission’s 956th sol (April 15, 2015), from the rover’s location in Gale Crater. This was the first sunset observed in color by Curiosity. The image comes from the left-eye camera of the rover’s Mast Camera (Mastcam). Credit: NASA/JPL-Caltech/MSSS/Texas A&M University.
No one really knows how long Curiosity will last, or if it will surprise everyone like its predecessors Spirit and Opportunity. Having made it past the ‘prime mission’ of one year on Mars (two Earth years), and now in the extended mission, the one big variable is the RTG power source. While the available power will start to steadily decrease, both Vasavada and Morookian don’t expect that to be in an issue for at least four more Earth years, and with the right “nurturing,” power could last for a dozen years or more.
But they also know there’s no way to predict how long Curiosity will go, or what unexpected event might end the mission.
The Beast
Does Curiosity have a personality like the previous Mars rovers?
“Actually no, we don’t seem to anthropomorphize this rover like people did with Spirit and Opportunity,” Vasavada said. “We haven’t bonded emotionally with it. Sociologists have actually been studying this.” He shook his head with an amused smile.
Vasavada indicated it might have something to do with Curiosity’s size.
“I think of it as a giant beast,” he said straight-faced. “But not in a mean way at all.”
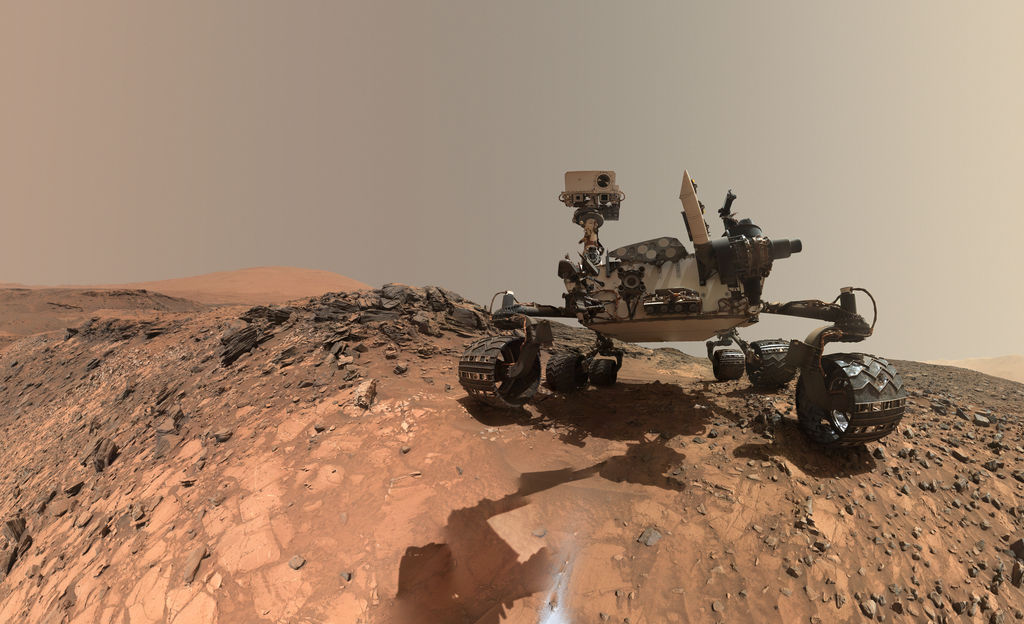
Curiosity appears to be photobombing Mount Sharp in this selfie image, a mosaic created from several MAHLI images. Credit: NASA/JPL-Caltech/MSSS/Edited by Jason Major.
What has come to come to characterize this mission, Vasavada said, is the complexity of it, in every dimension: the human component of getting 500 people to work and cooperate together while optimizing everyone’s talents; keeping the rover safe and healthy; and keeping ten instruments going every day, which are sometimes doing completely unrelated science tasks.
“Every day is our own little ‘seven minutes of terror,’ where so many things have to go right every single day,” Vasavada said. “There are a million potential issues and interactions, and you have to constantly be thinking about all the ways things can go wrong, because there are a million ways you can mess up. It’s an intricate dance, but fortunately we have a great team.”
Then he added with a smile, “This mission is exciting though, even if it’s a beast.”
“Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos” is published by Page Street Publishing, a subsidiary of Macmillan.
Author Nancy Atkinson at JPL with a model of the Curiosity Rover.
Curiosity's view of Mount Sharp, taken with the MastCam on Sept. 9th, 2015. Credit: NASA/JPL-Caltech/MSSS
Following is Part 2 of an excerpt from my new book, “Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos.” The book is an inside look at several current NASA robotic missions, and this excerpt is part 2 of 3 which will be posted here on Universe Today, of Chapter 2, “Roving Mars with Curiosity.” You can read Part 1 here. The book is available in print or e-book (Kindle or Nook) Amazon and Barnes & Noble.
Living on Mars Time
The landing occurred at 10:30 pm in California. The MSL team had little time to celebrate, transitioning immediately to mission operations and planning the rover’s first day of activity. The team’s first planning meeting started at 1 o’clock in the morning, ending about 8 a.m. They had been up all night, putting in a nearly 40-hour day.
This was a rough beginning of the mission for the scientists and engineers who needed to live on ‘Mars Time.’
A day on Mars day is 40 minutes longer than Earth’s day, and for the first 90 Mars days – called sols — of the mission, the entire team worked in shifts around the clock to constantly monitor the newly landed rover. To operate on the same daily schedule as the rover meant a perpetually shifting sleep/wake cycle where the MSL team would alter their schedules 40 minutes every day to stay in sync with the day and night schedules on Mars. If team members came into work at 9:00 a.m., the next day, they’d come in at 9:40 a.m., and the next day at 10:20 a.m., and so on.
Those who have lived through Mars Time say their bodies continually feel jet-lagged. Some people slept at JPL so as not to disrupt their family’s schedule, some wore two watches so they would know what time it was on two planets.
About 350 scientists from around the world were involved with MSL and many of them stayed at JPL for the first 90 sols of the mission, living on Mars Time.
But it took less than 60 Earth days for the team to announce Curiosity’s first big discovery.
Water, Water …
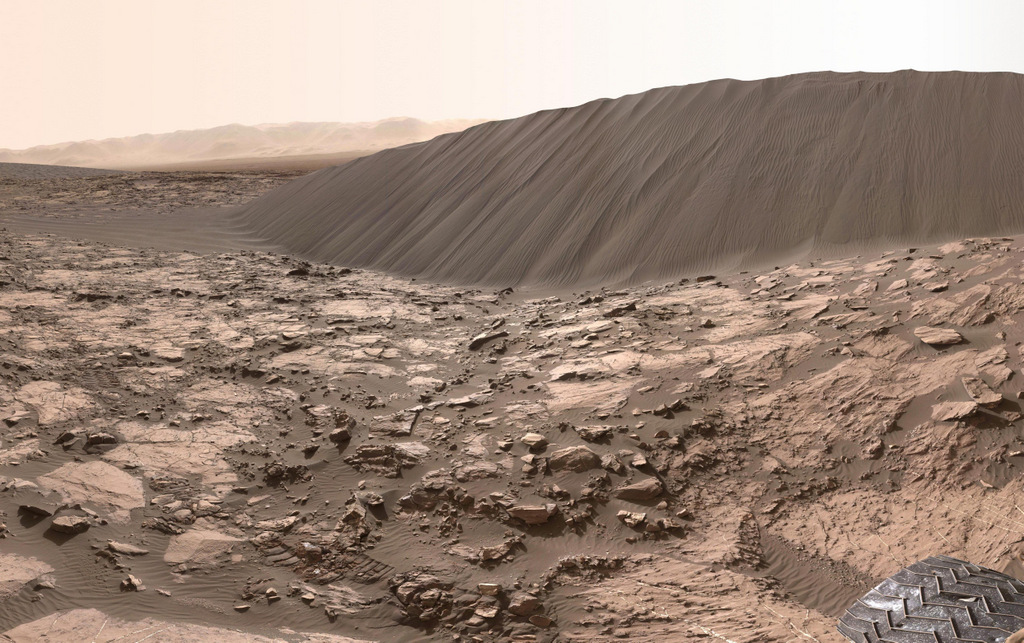
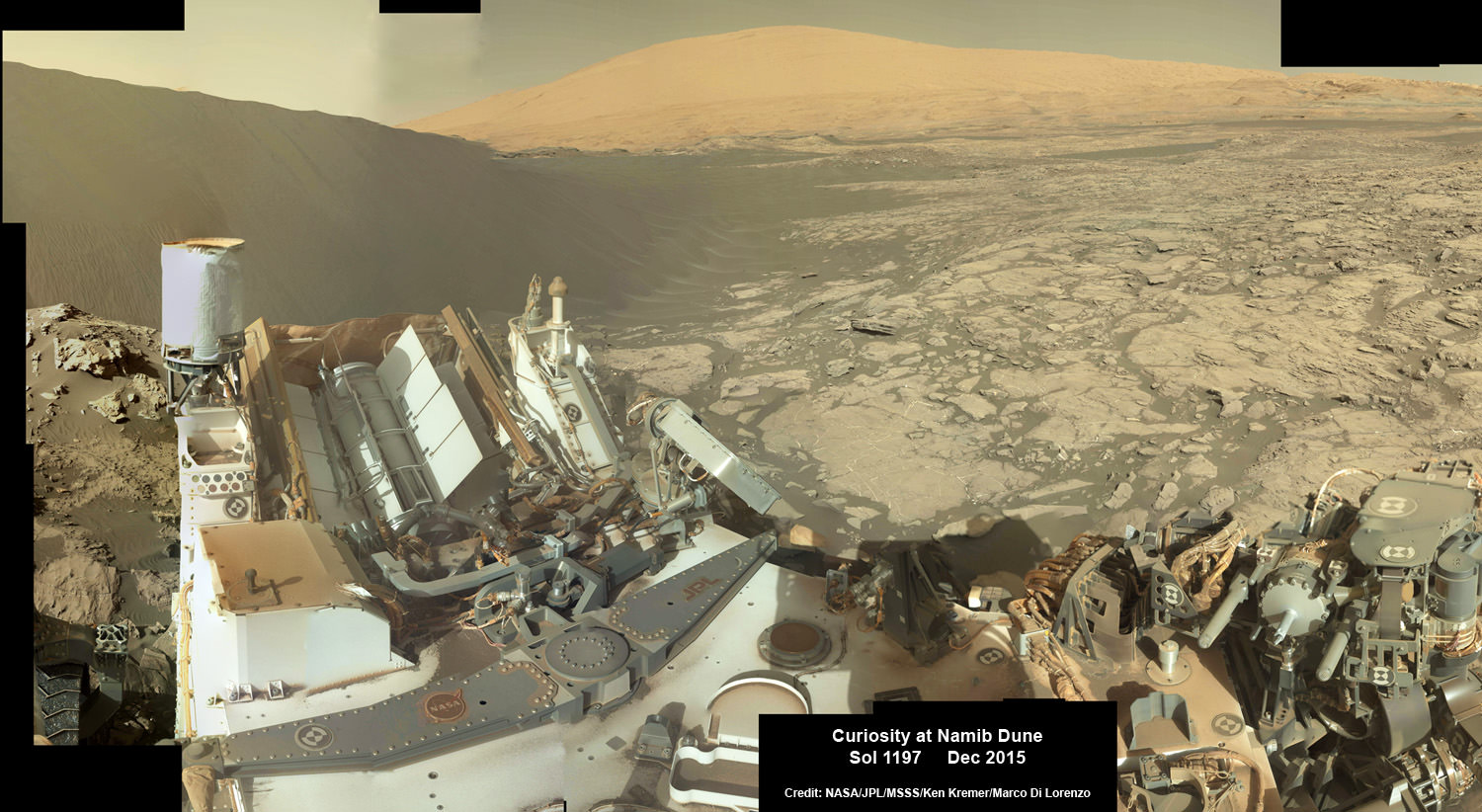
A 16-ft. (5 m) high sand dune on Mars called Namib Dune is part of the dark-sand ‘Bagnold Dunes’ field along the northwestern flank of Mount Sharp. Images taken from orbit indicate that dunes in the Bagnold field move as much as about 3 feet (1 m) per Earth year. This image is part of a 360 degree panorama taken by the Curiosity rover on Dec. 18, 2015 or the 1,197th Martian day, or sol, of the rover’s work on Mars. Credit: NASA/JPL-Caltech/MSSS.
Ashwin Vasavada grew up in California and has fond childhood memories of visiting state and national parks in the southwest United States with his family, playing among sand dunes and hiking in the mountains. He’s now able to do both on another planet, vicariously through Curiosity. The day I visited Vasavada at his office at JPL in early 2016, the rover was navigating through a field of giant sand dunes at the base of Mount Sharp, with some dunes towering 30 feet (9 meters) above the rover.
“It’s just fascinating to see dunes close up on another planet,” Vasavada said. “And the closer we get to the mountain, the more fantastic the geology gets. So much has gone on there, and we have so little understanding of it … as of yet.”
At the time we talked, Curiosity was approaching four Earth years on Mars. The rover is now studying those enticing sedimentary layers on Mt. Sharp in closer detail. But first, it needed to navigate through the “Bagnold Dunes” which form a barrier along the northwestern flank of the mountain. Here, Curiosity is doing what Vasavada calls “flyby science,” stopping briefly to sample and study the sand grains of the dunes while moving through the area as quickly as possible.
Now working as the lead Project Scientist for the mission, Vasavada plays an even larger role in coordinating the mission.
“It’s a constant balance of doing things quickly, carefully and efficiently, as well as using the instruments to their fullest,” he said.
Since the successful August 2012 landing, Curiosity has sent back tens of thousands of images from Mars – from expansive panoramas to extreme close-ups of rocks and sand grains, all of which are helping to tell the story of Mars’ past.
‘Selfies’ taken by the Curiosity rover are actually a mosaic created from numerous images taken with the Mars Hand Lens Imager (MAHLI), located on the end of the rover’s robotic arm. However, the arm is not shown in the selfies, because with the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. However, the shadow of the arm is visible on the ground. This low-angle selfie shows the vehicle at the site from which it reached down to drill into a rock target called “Buckskin” on lower Mount Sharp. Credit: NASA/JPL-Caltech/MSSS.
The images the public seems to love the most are the ‘selfies,’ the photos the rover takes of itself sitting on Mars. The selfies aren’t just a single image like the ones we take with our cell phones, but a mosaic created from dozens of separate images taken with the Mars Hand Lens Imager (MAHLI) camera at the end of the rover’s robotic arm. Other fan favorites are the pictures Curiosity takes of the magnificent Martian landscape, like a tourist documenting its journey.
Vasavada has a unique personal favorite.
“For me, the most meaningful picture from Curiosity really isn’t that great of an image,” he said, “but it was one of our first discoveries so it has an emotional tie to it.”
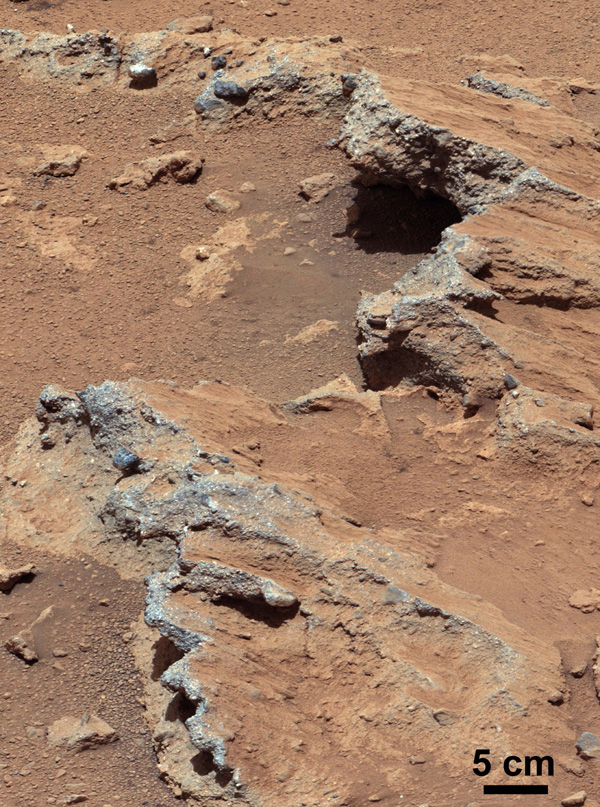
Within the first 50 sols, Curiosity took pictures of what geologists call conglomerates: a rock made of pebbles cemented together. But these were no ordinary pebbles — they were pebbles worn by flowing water. Serendipitously, the rover had found an ancient streambed where water once flowed vigorously. From the size of pebbles, the science team could interpret the water was moving about 3 feet (1 meter) per second, with a depth somewhere between a few inches to several feet. This geological feature on Mars is exposed bedrock made up of smaller fragments cemented together, or what geologists call a sedimentary conglomerate, and is evidence for an ancient, flowing stream. Some of embedded and loose gravel are round in shape, leading the Curiosity science team to conclude it were transported by a vigorous flow of water. Curiosity’s 100-millimeter Mastcam telephoto lens on its 39th sol of the mission (Sept. 14, 2012). Credit: NASA/JPL-Caltech/MSSS
“When you see this picture, and whether you are a gardener or geologist, you know what this means,” Vasasvada said excitedly. “At Home Depot, the rounded rock for landscaping are called river pebbles! It was mind-blowing to me to think that the rover was driving through a streambed. That picture really brought home there was actually water flowing here long ago, probably ankle to hip deep.”
Vasavada looked down. “It still gives me the shivers, just thinking about it,” he said, with his passion for exploration and discovery visibly evident.
From that early discovery, Curiosity continued to find more water-related evidence. The team took a calculated gamble and instead of driving straight towards Mt. Sharp, took a slight detour to the east to an area dubbed ‘Yellowknife Bay.’
“Yellowknife Bay was something we saw with the orbiters,” Vasavada explained, “and there appeared to be a debris fan fed by a river—evidence for flowing water in the ancient past.”
This map shows the route driven by NASA’s Curiosity Mars rover from the location where it landed in August 2012 to its location in September 2016 at “Murray Buttes,” and the path planned for reaching destinations at “Hematite Unit” and “Clay Unit” on lower Mount Sharp. Credits: NASA/JPL-Caltech/Univ. of Arizona
Here, Curiosity fulfilled ones of its main goals: determining whether Gale Crater ever was habitable for simple life forms. The answer was a resounding yes. The rover sampled two stone slabs with the drill, feeding half-baby-aspirin-sized portions to SAM, the onboard lab. SAM identified traces of elements like carbon, hydrogen, nitrogen, oxygen, and more —the basic building blocks of life. It also found sulfur compounds in different chemical forms, a possible energy source for microbes.
Data gathered by Curiosity’s other instruments constructed a portrait detailing how this site was once a muddy lakebed with mild – not acidic – water. Add in the essential elemental ingredients for life, and long ago, Yellowknife Bay would have been the perfect spot for living organisms to hang out. While this finding doesn’t necessarily mean there is past or present life on Mars, it shows the raw ingredients existed for life to get started there at one time, in a benign environment.
“Finding the habitable environment in Yellowknife Bay was wonderful because it really showed the capability our mission has to measure so many different things,” Vasavada said. “A wonderful picture came together of streams that flowed into a lake environment. This was exactly what we were sent there to find, but we didn’t think we’d find it that early in the mission.”
Still, this lakebed could have been created by a one-time event over just hundreds of years. The ‘jackpot’ would be to find evidence of long-term water and warmth.
That discovery took a little longer. But personally, it means more to Vasavada.
Mars’ climate was one of Vasavada’s early interests in his career and he spent years creating models, trying to understand Mars’ ancient history.
“I grew up with pictures of Mars from the Viking mission,” he said, “and thinking of it as a barren place with jagged volcanic rock and a bunch of sand. Then I had done all this theoretical work about Mars climate, that rivers and oceans perhaps once existed on Mars, but we had no real evidence.”
That’s why the discovery made by Curiosity in late 2015 is so exciting to Vasavada and his team.
“We didn’t just see the rounded pebbles and remnants of the muddy lake bottom at Yellowknife Bay, but all along the route,” Vasavada said. “We saw river pebbles first, then tilted sandstones where the river emptied into lakes. Then as we got to Mt. Sharp, we saw huge expanses of rock made of the silt that settled out from the lakes.”
The explanation that best fits the “morphology” in this region — that is, the configuration and evolution of rocks and land forms – is rivers formed deltas as they emptied into a lake. This likely occurred 3.8 to 3.3 billion years ago. And the rivers delivered sediment that slowly built up the lower layers of Mt. Sharp.
Curiosity picture showing the layers and color variations on Mount Sharp, Mars. Credit: NASA/JPL
“My gosh, we were seeing this full system now,” Vasavada explained, “showing how the entire lower few hundred meters of Mount Sharp were likely laid down by these river and lake sediments. That means this event didn’t take hundreds or thousands of years; it required millions of years for lakes and rivers to be present to slowly build up, millimeter by millimeter, the bottom of the mountain.”
For that, Mars also needed a thicker atmosphere than it has now, and a greenhouse gas composition that Vasavada said they haven’t quite figured out yet.
But then, somehow dramatic climate change caused the water to disappear and winds in the crater carved the mountain to its current shape.
The rover had landed in exactly the right place, because here in one area was a record of much of Mars’ environmental history, including evidence of a major shift in the planet’s climate, when the water that once covered Gale Crater with sediment dried up.
“This all is a significant driver now for what we need to explain about Mars’ early climate,” Vasavada said. “You don’t get millions of years of climate change from a single event like a meteor hit. This discovery has broad implications for the entire planet, not just Gale Crater.”
Other Discoveries
• Silica: The rover made a completely unanticipated discovery of high-content silica rocks as it approached Mt. Sharp. “This means that the rest of the normal elements that form rocks were stripped away, or that a lot of extra silica was added somehow,” Vasavada said, “both of which are very interesting, and very different from rocks we had seen before. It’s such a multifaceted and curious discovery, we’re going to take a while figuring it out.”
• Methane on Mars: Methane is usually a sign of activity involving organic matter — even, potentially, of life. On Earth, about 90 percent of atmospheric methane is produced from the breakdown of organic matter. On Mars, methane has been detected by other missions and telescopes over the years, but it was tenuous – the readings seemed to come and go, and are hard to verify. In 2014, the Tunable Laser Spectrometer within the SAM instrument observed a ten-fold increase in methane over a two-month period. What caused the brief and sudden increase? Curiosity will continue to monitor readings of methane, and hopefully provide an answer to the decades-long debate.
• Radiation Risks for Human Explorers: Both during her trip to Mars and on the surface, Curiosity measured the high-energy radiation from the Sun and space that poses a risk astronauts. NASA will use data from the Radiation Assessment Detector (RAD) instrument Curiosity’s data to design future missions to be safe for human explorers.
Tomorrow: The conclusion of this chapter, including ‘How To Drive a Mars Rover, and ‘The Beast.’ Part 1 is available here.
“Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos” is published by Page Street Publishing, a subsidiary of Macmillan.
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
Following is an excerpt from my new book, “Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos,” which will be released tomorrow, Dec. 20, 2016. The book is an inside look at several current NASA robotic missions, and this excerpt is part 1 of 3 which will be posted here on Universe Today, of Chapter 2, “Roving Mars with Curiosity.” The book is available for order on Amazon and Barnes & Noble.
Seven Minutes of Terror
It takes approximately seven minutes for a moderate-sized spacecraft – such as a rover or a robotic lander — to descend through the atmosphere of Mars and reach the planet’s surface. During those short minutes, the spacecraft has to decelerate from its blazing incoming speed of about 13,000 mph (20,900 kph) to touch down at just 2 mph (3 kph) or less.
This requires a Rube Goldberg-like series of events to take place in perfect sequence, with precise choreography and timing. And it all needs to happen automatically via computer, with no input from anyone on Earth. There is no way to guide the spacecraft remotely from our planet, about 150 million miles (250 million km) away. At that distance, the radio signal delay time from Earth to Mars takes over 13 minutes. Therefore, by the time the seven-minute descent is finished, all those events have happened – or not happened – and no one on Earth knows which. Either your spacecraft sits magnificently on the surface of Mars or lies in a crashed heap.
A depiction of the numerous events required for the Curiosity rover to land successfully on Mars. Credit: NASA/JPL.
That’s why scientists and engineers from the missions to Mars call it “Seven Minutes of Terror.”
And with the Mars Science Laboratory (MSL) mission, which launched from Earth in November of 2011, the fear and trepidation about what is officially called the ‘Entry, Descent and Landing’ (EDL) increased exponentially. MSL features a 1-ton (900 kg), 6-wheeled rover named Curiosity, and this rover was going to use a brand new, untried landing system.
To date, all Mars landers and rovers have used — in order — a rocket-guided entry, a heat shield to protect and slow the vehicle, then a parachute, followed by thrusters to slow the vehicle even more. Curiosity would use this sequence as well. However, a final, crucial component encompassed one of the most complex landing devices ever flown.
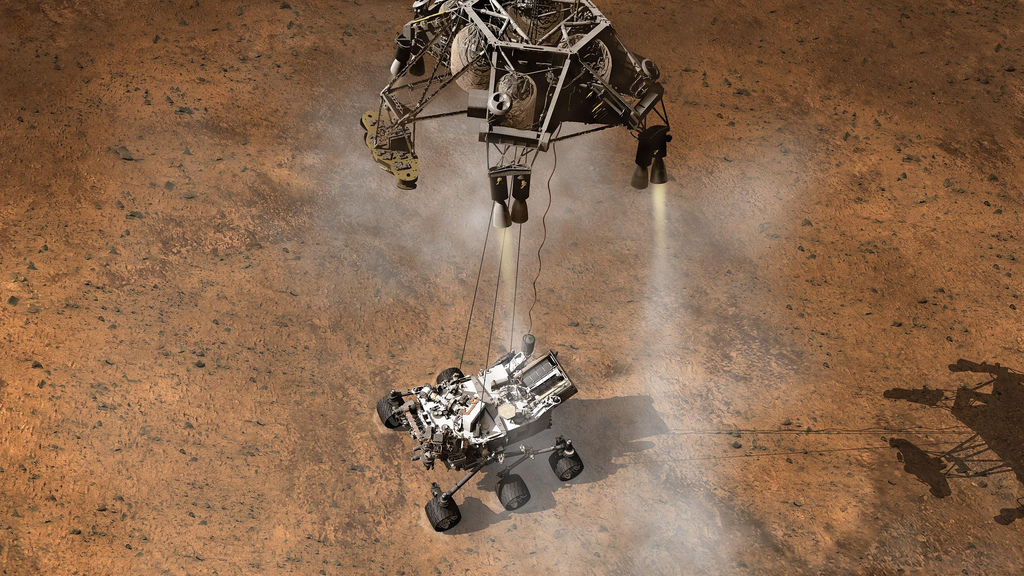
Artists concept of the moment the Curiosity rover touches down on the Martian surface, suspended on a bridle beneath the spacecraft’s descent stage. Credit: NASA/JPL-Caltech
Dubbed the “Sky Crane,” a hovering rocket stage would lower the rover on 66 ft. (20 meter) cables of Vectran rope like a rappelling mountaineer, with the rover soft-landing directly on its wheels. This all needed to be completed in a matter of seconds, and when the on-board computer sensed touchdown, pyrotechnics would sever the ropes, and the hovering descent stage would zoom away at full throttle to crash-land far from Curiosity.
Complicating matters even further, this rover was going to attempt the most precise off-world landing ever, setting down inside a crater next to a mountain the height of Mount Rainier.
A major part of the uncertainty was that engineers could never test the entire landing system all together, in sequence. And nothing could simulate the brutal atmospheric conditions and lighter gravity present on Mars except being on Mars itself. Since the real landing would be the first time the full-up Sky Crane would be used, there were questions: What if the cables didn’t separate? What if the descent stage kept descending right on top of the rover?
If the Sky Crane didn’t work, it would be game-over for a mission that had already overcome so much: technical problems, delays, cost overruns, and the wrath of critics who said this $2.5 billion Mars rover was bleeding money away from the rest of NASA’s planetary exploration program.
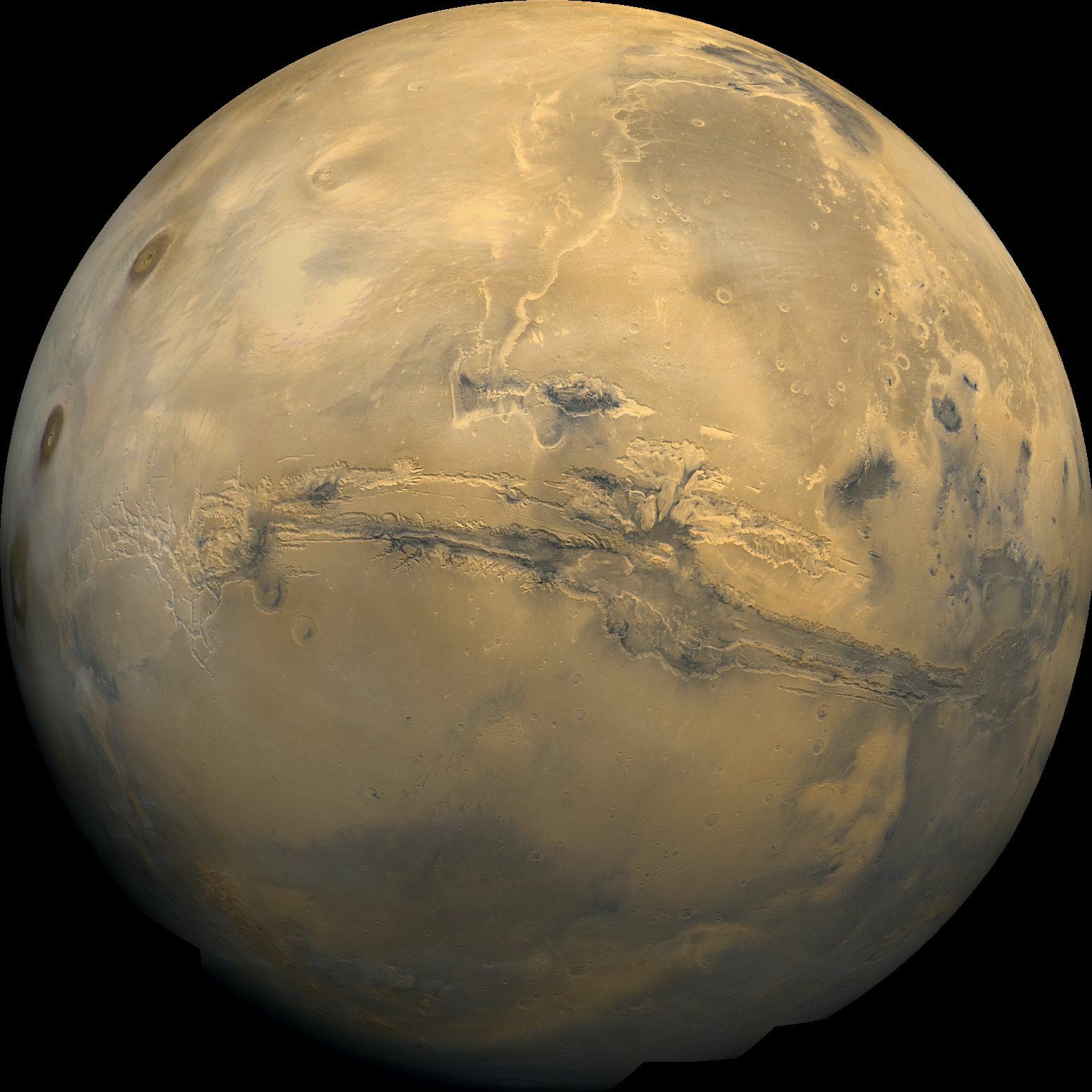
Mosaic of the Valles Marineris hemisphere of Mars, similar to what one would see from orbital distance of 2500 km. Credit: NASA/JPL-Caltech
Missions to Mars
With its red glow in the nighttime sky, Mars has beckoned skywatchers for centuries. As the closest planet to Earth that offers any potential for future human missions or colonization, it has been of great interest in the age of space exploration. To date, over 40 robotic missions have been launched to the Red Planet … or more precisely, 40-plus missions have been attempted.
Including all US, European, Soviet/Russian and Japanese efforts, more than half of Mars missions have failed, either because of a launch disaster, a malfunction en route to Mars, a botched attempt to slip into orbit, or a catastrophic landing. While recent missions have had greater success than our first pioneering attempts to explore Mars in situ (on location) space scientists and engineers are only partially kidding when they talk about things like a ‘Great Galactic Ghoul’ or the ‘Mars Curse’ messing up the missions.
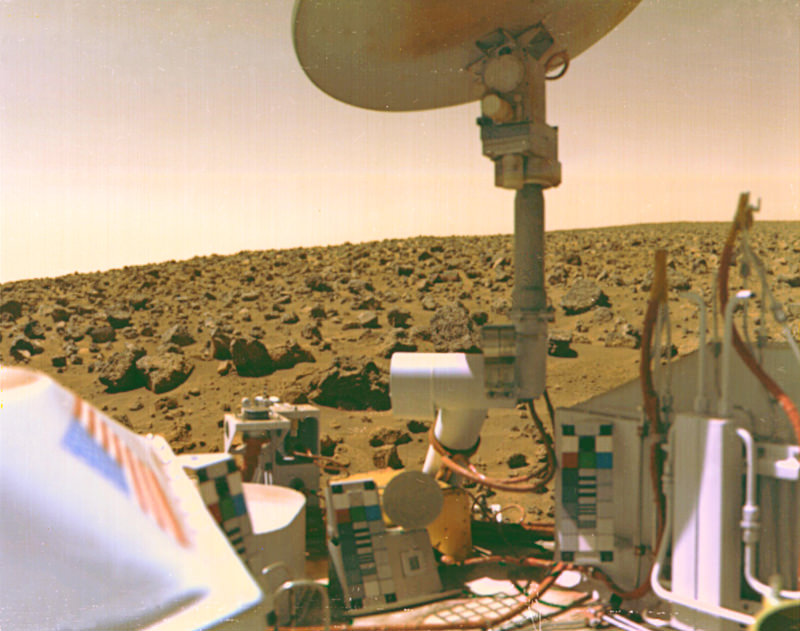
View of Mars from Viking 2 lander, September 1976. (NASA/JPL-Caltech)
But there have been wonderful successes, too. Early missions in the 1960’s and 70’s such as Mariner orbiters and Viking landers showed us a strikingly beautiful, although barren and rocky world, thereby dashing any hopes of ‘little green men’ as our planetary neighbors. But later missions revealed a dichotomy: magnificent desolation combined with tantalizing hints of past — or perhaps even present day – water and global activity.
Today, Mars’ surface is cold and dry, and its whisper-thin atmosphere doesn’t shield the planet from bombardment of radiation from the Sun. But indications are the conditions on Mars weren’t always this way. Visible from orbit are channels and intricate valley systems that appear to have been carved by flowing water.
For decades, planetary scientists have debated whether these features formed during brief, wet periods caused by cataclysmic events such as a massive asteroid strike or sudden climate calamity, or if they formed over millions of years when Mars may have been continuously warm and wet. Much of the evidence so far is ambiguous; these features could have formed either way. But billions of years ago, if there were rivers and oceans, just like on Earth, life might have taken hold.
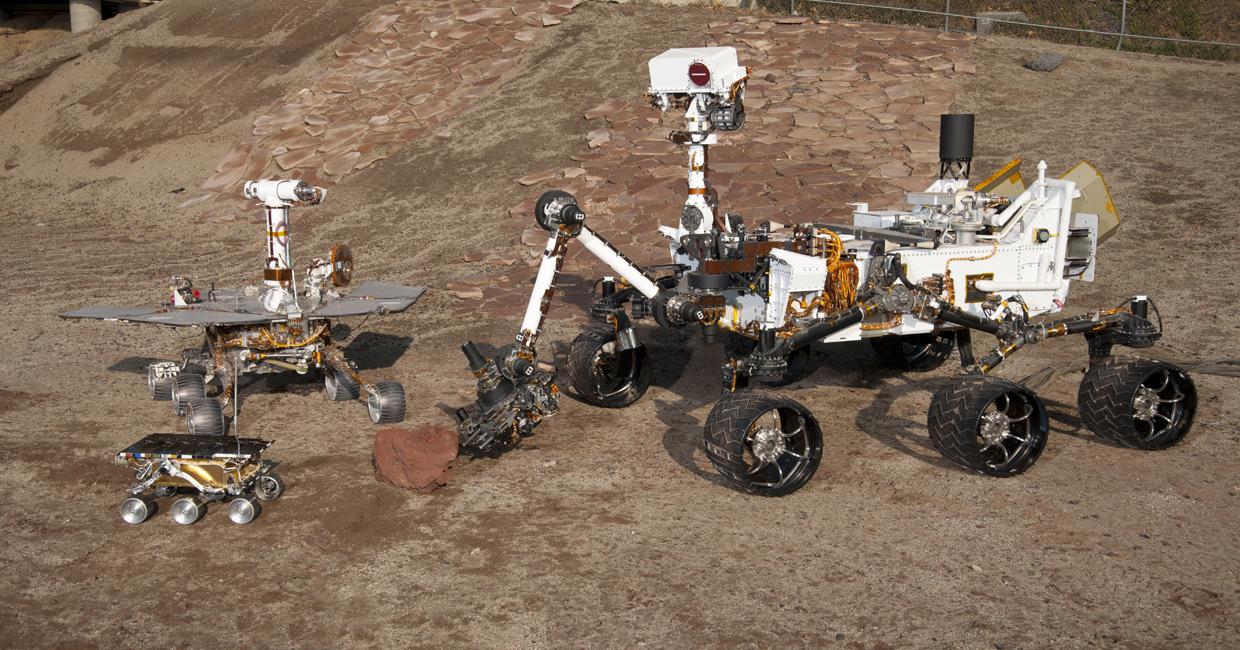
Three Generations of Mars Rovers in the ‘Mars Yard’ at the Jet Propulsion Laboratory. The Mars Pathfinder Project (front) landed the first Mars rover – Sojourner – in 1997. The Mars Exploration Rover Project (left) landed Spirit and Opportunity on Mars in 2004. The Mars Science Laboratory Curiosity rover landed on Mars in August 2012. Credit: NASA/JPL-Caltech.
The Rovers
The Curiosity rover is the fourth mobile spacecraft NASA has sent to Mars’ surface. The first was a 23-pound (10.6 kg) rover named Sojourner that landed on a rock-covered Martian plain on July 4, 1997. About the size of a microwave oven, the 2-foot- (65 cm) long Sojourner never traversed more than 40 feet away from its lander and base station. The rover and lander together constituted the Pathfinder mission, which was expected to last about a week. Instead, it lasted nearly three months and the duo returned 2.6 gigabits of data, snapping more than 16,500 images from the lander and 550 images from the rover, as well as taking chemical measurements of rocks and soil and studying Mars’ atmosphere and weather. It identified traces of a warmer, wetter past for Mars.
Sojourner – NASA’s 1st Mars Rover. Rover takes an Alpha Proton X-ray Spectrometer (APXS) measurement of Yogi rock after Red Planet landing on July 4, 1997 landing. Credit: NASA
The mission took place when the Internet was just gaining popularity, and NASA decided to post pictures from the rover online as soon as they were beamed to Earth. This ended up being one of the biggest events in the young Internet’s history, with NASA’s website (and mirror sites set up for the high demand) receiving over 430 million hits in the first 20 days after landing.
Pathfinder, too, utilized an unusual landing system. Instead of using thrusters to touch down on the surface, engineers concocted a system of giant airbags to surround and protect the spacecraft. After using the conventional system of a rocket-guided entry, heat shield, parachutes and thrusters, the airbags inflated and the cocooned lander was dropped from 100 feet (30 m) above the ground. Bouncing several times across Mars’ surface times like a giant beach ball, Pathfinder eventually came to a stop, the airbags deflated and the lander opened up to allow the rover to emerge.
While that may sound like a crazy landing strategy, it worked so well that NASA decided to use larger versions of the airbags for the next rover mission: two identical rovers named Spirit and Opportunity. The Mars Exploration Rovers (MER) are about the size of a riding lawn mower, at 5.2 feet (1.6 meters) long, weighing about 400 lbs (185 kilograms). Spirit landed successfully near Mars’ equator on January 4, 2004, and three weeks later Opportunity bounced down on the other side of the planet. The goal of MER was to find evidence of past water on Mars, and both rovers hit the jackpot. Among many findings, Opportunity found ancient rock outcrops that were formed in flowing water and Spirit found unusual cauliflower-shaped silica rocks that scientists are still studying, but they may provide clues to potential ancient Martian life.
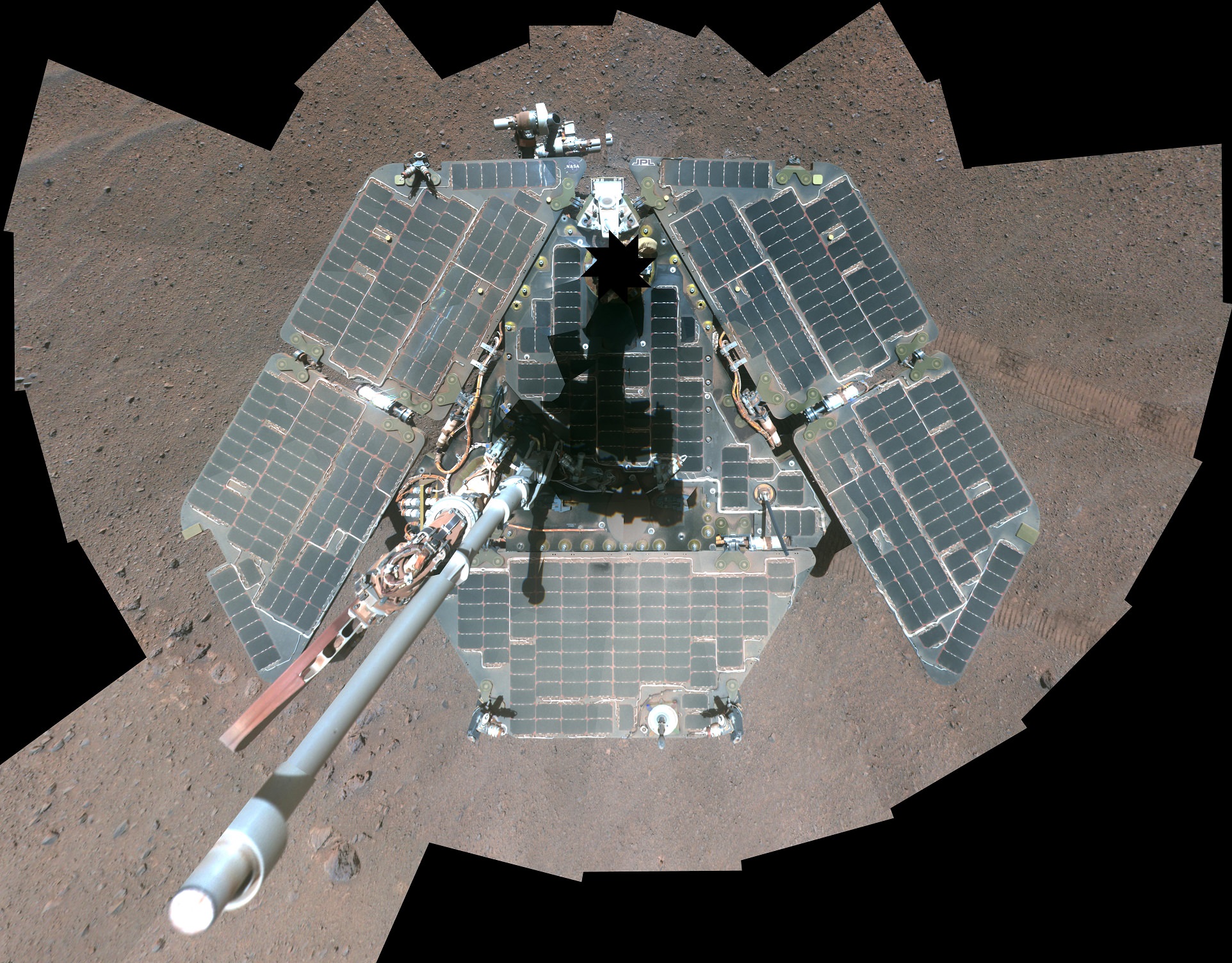
A self-portrait of the Opportunity rover shortly after dust cleared its solar panels in March 2014. Credit: NASA/JPL-Caltech/Cornell Univ./Arizona State Univ.Incredibly, at this writing (2016) the Opportunity rover is still operating, driving more than a marathon (26 miles/42 km) and it continues to explore Mars at a large crater named Endeavour. Spirit, however, succumbed to a loss of power during the cold Martian winter in 2010 after getting stuck in a sandtrap. The two rovers far outlived their projected 90-day lifetime.
Somehow, the rovers each developed a distinct ‘personality’ – or, perhaps a better way to phrase it is that people assigned personalities to the robots. Spirit was a problem child and drama queen but had to struggle for every discovery; Opportunity, a privileged younger sister, and star performer, as new findings seemed to come easy for her. Spirit and Opportunity weren’t designed to be adorable, but the charming rovers captured the imaginations of children and seasoned space veterans alike. MER project manager John Callas once called the twin rovers “the cutest darn things out in the Solar System.” As the long-lived, plucky rovers overcame hazards and perils, they sent postcards from Mars every day. And Earthlings loved them for it.
Curiosity
While it’s long been on our space to-do list, we haven’t quite yet figured out how to send humans to Mars. We need bigger and more advanced rockets and spacecraft, better technology for things like life support and growing our own food, and we really don’t have the ability to land the very large payloads needed to create a human settlement on Mars.
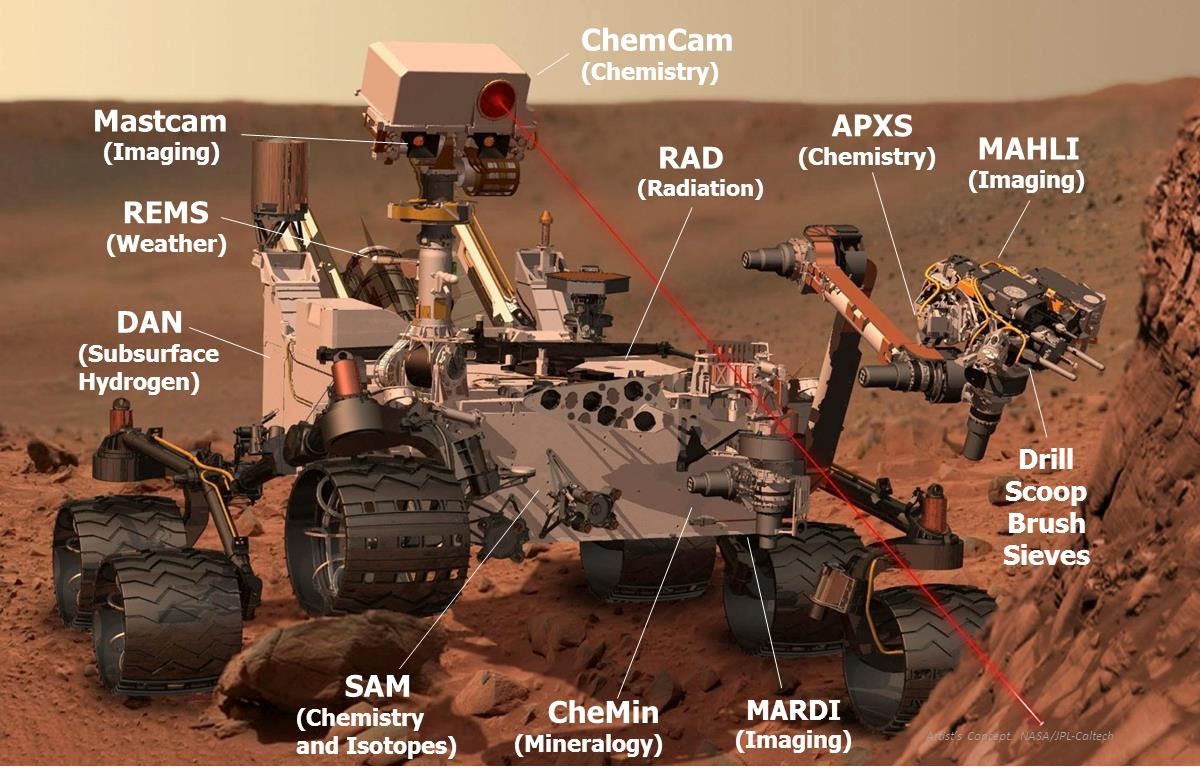
But in the meantime – while we try to figure all that out — we have sent the robotic equivalent of a human geologist to the Red Planet. The car-sized Curiosity rover is armed with an array of seventeen cameras, a drill, a scoop, a hand lens, and even a laser. These tools resemble equipment geologists use to study rocks and minerals on Earth. Additionally, this rover mimics human activity by mountain climbing, eating (figuratively speaking), flexing its (robotic) arm, and taking selfies.
Artist concept of the Curiosity rover, with the various science instruments labeled. Credit: NASA/JPL.
This roving robotic geologist is also a mobile chemistry lab. A total of ten instruments on the rover help search for organic carbon that might indicate the raw material required by life, and “sniff” the Martian air, trying to smell if gasses like methane — which could be a sign of life — are present. Curiosity’s robotic arm carries a Swiss Army knife of gadgets: a magnifying lens-like camera, a spectrometer to measure chemical elements, and a drill to bore inside rocks and feed samples to the laboratories named SAM (Sample Analysis at Mars) and) and CheMin (Chemistry and Mineralogy). The ChemCam laser can vaporize rock from up to 23 feet (7 meters) away, and identify the minerals from the spectrum of light emitted from the blasted rock. A weather station and radiation monitor round out the devices on board.
With these cameras and instruments, the rover becomes the eyes and hands for an international team of about 500 earthbound scientists.
While the previous Mars rovers used solar arrays to gather sunlight for power, Curiosity uses an RTG like New Horizons. The electricity generated from the RTG repeatedly powers rechargeable lithium-ion batteries, and the RTG’s heat is also piped into the rover chassis to keep the interior electronics warm.
With Curiosity’s size and weight, the airbag landing system used by the previous rovers was out of the question. As NASA engineer Rob Manning explained, “You can’t bounce something that big.” The Sky Crane is an audacious solution.
Curiosity’s mission: figure out how Mars evolved over billions of years and determine if it once was — or even now is — capable of supporting microbial life.
Curiosity’s target for exploration: a 3.4 mile (5.5 km) -high Mars mountain scientists call Mt. Sharp (formally known as Aeolis Mons) that sits in the middle of Gale Crater, a 96-mile (155-km) diameter impact basin.
Gale was chosen from 60 candidate sites. Data from orbiting spacecraft determined the mountain has dozens of layers of sedimentary rock, perhaps built over millions of years. These layers could tell the story of Mars’ geologic and climate history. Additionally, both the mountain and the crater appear to have channels and other features that look like they were carved by flowing water.
The plan: MSL would land in a lower, flatter part of the crater and carefully work its way upward towards the mountain, studying each layer, essentially taking a tour of the epochs of Mars’ geologic history.
The hardest part would be getting there. And the MSL team only had one chance to get it right.
Landing Night
Curiosity’s landing on August 5, 2012 was one of the most anticipated space exploration events in recent history. Millions of people watched events unfold online and on TV, with social media feeds buzzing with updates. NASA TV’s feed from JPL’s mission control was broadcast live on the screens in New York’s Time Square and at venues around the world hosting ‘landing parties.’
But the epicenter of action was at JPL, where hundreds of engineers, scientists and NASA officials gathered at JPL’s Space Flight Operations Facility. The EDL team – all wearing matching light blue polo shirts — monitored computer consoles at mission control.
Two members of the team stood out: EDL team lead Adam Steltzner — who wears his hair in an Elvis-like pompadour — paced back and forth between the rows of consoles. Flight Director Bobak Ferdowski sported and an elaborate stars and stripes Mohawk. Obviously, in the twenty-first century, exotic hairdos have replaced the 1960’s black glasses and pocket protectors for NASA engineers.
MSL project scientist Ashwin Vasavada with a full scale model of the Curiosity rover. Credit: NASA/JPL.
At the time of the landing, Ashwin Vasavada was one of the longest serving scientists on the mission team, having joined MSL as the Deputy Project Scientist in 2004 when the rover was under construction. Back then, a big part of Vasavada’s job was working with the instrument teams to finalize the objectives of their instruments, and supervise technical teams to help develop the instruments and integrate them with the rover.
Each of the ten selected instruments brought a team of scientists, so with engineers, additional staff and students, there were hundreds of people getting the rover ready for launch. Vasavada helped coordinate every decision and modification that might affect the eventual science done on Mars. During the landing, however, all he could do was watch.
“I was in the room next door to the control room that was being shown on TV,” Vasavada said. “For the landing there was nothing I could do except realize the past eight years of my life and my entire future was all riding on that seven minutes of EDL.”
Plus, the fact that no would know the real fate of the rover until 13 minutes after the fact due to the radio delay time led to a feeling of helplessness for everyone at JPL.
“Although I was sitting in a chair,” Vasavada added, “I think I was mentally curled up in the fetal position.”
As Curiosity sped closer to Mars, three other veteran spacecraft already orbiting the planet moved into position to be able to keep an eye on the newcomer MSL as it transmitted information on its status. At first, MSL communicated directly to the Deep Space Network (DSN) antennas on Earth.
To make telemetry from the spacecraft as streamlined as possible during EDL, Curiosity sent out 128 simple but distinct tones indicating when steps in the landing process were activated. Allen Chen, an engineer in the control room announced each as they came: one sound indicated the spacecraft entered Mars’ atmosphere; another signaled the thrusters fired, guiding the spacecraft towards Gale Crater. Tentative clapping and smiles came from the team at Mission Control at the early tones, with emotions increasing as the spacecraft moved closer and closer to the surface.
Partway through the descent, MSL went below the Martian horizon, putting it out of communication with Earth. But the three orbiters — Mars Odyssey, Mars Reconnaissance Orbiter and Mars Express — were ready to capture, record and relay data to the DSN.
Scenes from landing night for the Curiosity rover at JPL’s Space Flight Operations Facility. Credit: NASA/JPL.
Seamlessly, the tones kept coming to Earth as each step of the landing continued flawlessly. The parachute deployed. The heat shield dropped away. A tone signaled the descent stage carrying the rover let go of the parachute, another indicated powered flight and descent toward the surface. Another tone meant the Sky Crane began lowering the rover to the surface.
A tone arrived, indicating Curiosity’s wheels touched the surface, but even that didn’t mean success. The team had to make sure the Sky Crane flyaway maneuver worked.
Then, came the tone they were waiting for: “Touchdown confirmed,” cheered Chen. “We’re safe on Mars!”
Pandemonium and joy erupted in JPL’s mission control, at the landing party sites, and on social media. It seemed the world celebrated together at that moment. Cost overruns, delays, all the negative things ever said about the MSL mission seemed to vanish with the triumph of landing.
“Welcome to Mars!” the Director of the Jet Propulsion Laboratory, Charles Elachi said at a press conference following the dramatic touchdown, “Tonight we landed, tomorrow we start exploring Mars. Our Curiosity has no limits.”
Curiosity’s Twitter feed announced its arrival on Mars on August 5, 2012. Credit: Twitter.
“The seven minutes actually went really fast,” said Vasavada. “It was over before we knew it. Then everybody was jumping up and down, even though most of us were still processing that it went so successfully.”
That the landing went so well — indeed perfectly — may have actually shocked some of the team at JPL. While they had rehearsed Curiosity’s landing several times, remarkably, they were never able to land the vehicle in their simulations.
“We tried to rehearse it very accurately,” Vasavada said, “so that everything was in synch — both the telemetry that we had simulated that would be coming from the spacecraft, along with real-time animations that had been created. It was a pretty complex thing, but it never actually worked. So the real, actual landing was the first time everything worked right.”
Curiosity was programmed to immediately take pictures of its surroundings. Within two minutes of the landing, the first images were beamed to Earth and popped up on the viewing screens at JPL.
“We had timed the orbiters to fly over during the landing, but didn’t know for sure if their relay link would last long enough to get the initial pictures down,” Vasavada said. “Those first pictures were fairly ratty because the protective covers were still on the cameras and the thrusters had kicked up a lot of dust on the covers. We couldn’t really see it very well but we still jumped up and down nevertheless because these were pictures from Mars.”
Amazingly, one of the first pictures showed exactly what the rover had been sent to study.
“We had landed with the cameras basically facing directly at Mt. Sharp,” Vasavada said, shaking his head. “In the HazCam (hazard camera) image, right between the wheels, we had this gorgeous shot. There was the mountain. It was like a preview of the whole mission, right in front of us.”
An image captured by the Curiosity rover shortly after it landed on the Red Planet on August 5, 2015, showing the rover’s main science target, Mount Sharp. The rover’s shadow can be seen in the foreground and the dark band beyond are dunes. Credit; NASA/JPL-Caltech.
Tomorrow: Part 2 of “Roving Mars With Curiosity,” with ‘Living on Mars Time’ and ‘Discoveries’
“Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos” is published by Page Street Publishing, a subsidiary of Macmillan.
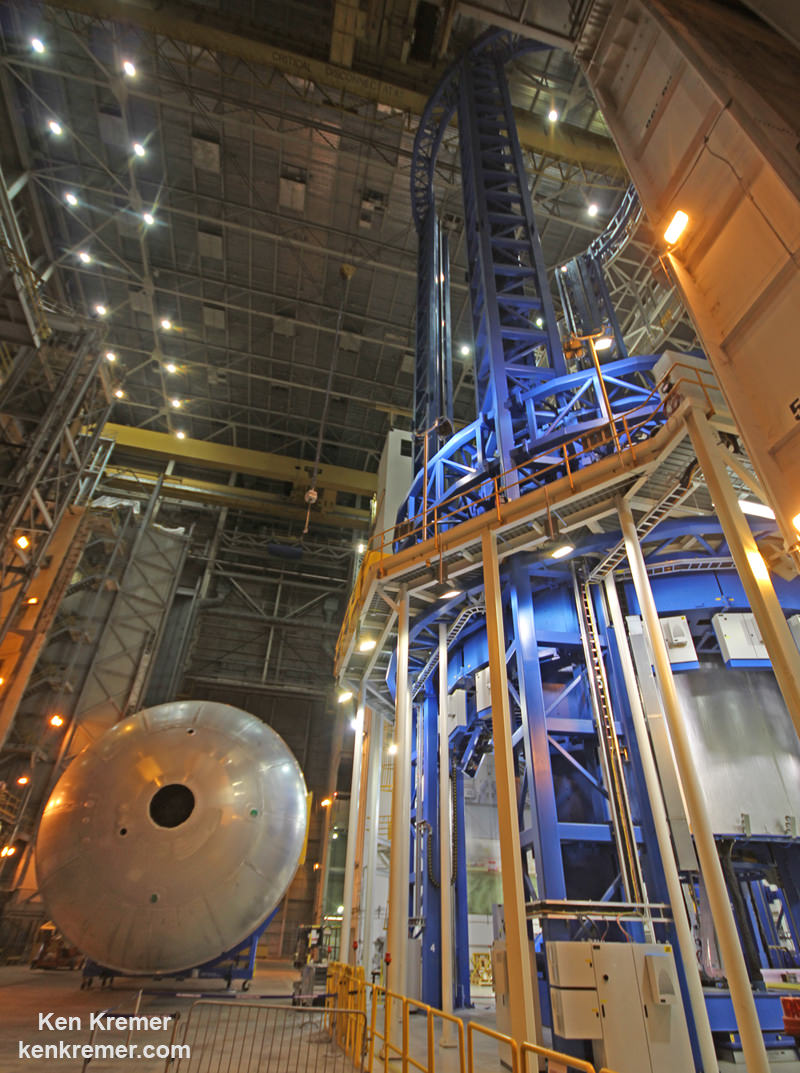
Welding is complete on the largest piece of the core stage that will provide the fuel for the first flight of NASA's new rocket, the Space Launch System, with the Orion spacecraft in 2018. The core stage liquid hydrogen tank has completed welding on the Vertical Assembly Center at NASA's Michoud Assembly Facility in New Orleans. Credit: NASA/MAF/Steven Seipel
Welding is complete on the largest piece of the core stage that will provide the fuel for the first flight of NASA’s new rocket, the Space Launch System, with the Orion spacecraft in 2018. The core stage liquid hydrogen tank has completed welding on the Vertical Assembly Center at NASA’s Michoud Assembly Facility in New Orleans. Credit: NASA/MAF/Steven Seipel
The first of the massive fuel tanks that will fly on the maiden launch of NASA’s SLS mega rocket in late 2018 has completed welding at the agency’s rocket manufacturing facility in New Orleans – marking a giant step forward for NASA’s goal of sending astronauts on a ‘Journey to Mars’ in the 2030s.
Welding is nearly complete on the liquid hydrogen tank will provide the fuel for the first flight of NASA’s new rocket, the Space Launch System, with the Orion spacecraft in 2018. The tank has now has now completed welding on the Vertical Assembly Center at NASA’s Michoud Assembly Facility in New Orleans. Credit: Ken Kremer/kenkremer.com
This flight version of the hydrogen tank is the largest of the two fuel tanks making up the SLS core stage – the other being the liquid oxygen tank (LOX).
In fact the 130 foot tall hydrogen tank is the biggest cryogenic tank ever built for flight.
“Standing more than 130 feet tall, the liquid hydrogen tank is the largest cryogenic fuel tank for a rocket in the world,” according to NASA.
And it is truly huge – measuring also 27.6 feet (8.4 m) in diameter.
The liquid hydrogen tank qualification test article for NASA’s new Space Launch System (SLS) heavy lift rocket lies horizontally after final welding was completed at NASA’s Michoud Assembly Facility in New Orleans in July 2016. Credit: Ken Kremer/kenkremer.com
The precursor qualification tank was constructed to prove out all the manufacturing techniques and welding tools being utilized at Michoud.
The first liquid hydrogen tank, also called the qualification test article, for NASA’s new Space Launch System (SLS) heavy lift rocket lies horizontally beside the Vertical Assembly Center robotic weld machine on July 22, 2016 after final welding was just completed at NASA’s Michoud Assembly Facility in New Orleans. Credit: Ken Kremer/kenkremer.com
SLS is the most powerful booster the world has even seen and one day soon will propel NASA astronauts in the agency’s Orion crew capsule on exciting missions of exploration to deep space destinations including the Moon, Asteroids and Mars – venturing further out than humans ever have before!
NASA’s agency wide goal is to send humans to Mars by the 2030s with SLS and Orion.
The LH2 and LOX tanks sit on top of one another inside the SLS outer skin. Together the hold over 733,000 gallons of propellant.
The SLS core stage – or first stage – is mostly comprised of the liquid hydrogen and liquid oxygen cryogenic fuel storage tanks which store the rocket propellants at super chilled temperatures. Boeing is the prime contractor for the SLS core stage.
The SLS core stage stands some 212 feet tall.
The SLS core stage is comprised of five major structures: the forward skirt, the liquid oxygen tank (LOX), the intertank, the liquid hydrogen tank (LH2) and the engine section.
The LH2 and LOX tanks feed the cryogenic propellants into the first stage engine propulsion section which is powered by a quartet of RS-25 engines – modified space shuttle main engines (SSMEs) – and a pair of enhanced five segment solid rocket boosters (SRBs) also derived from the shuttles four segment boosters.
NASA engineers successfully conducted a development test of the RS-25 rocket engine Thursday, Aug. 18 at NASA’s Stennis Space Center near Bay St. Louis, Miss. The RS-25 will help power the core stage of the agency’s new Space Launch System (SLS) rocket for the journey to Mars. Credit: Ken Kremer/kenkremer.com
The vehicle’s four RS-25 engines will produce a total of 2 million pounds of thrust.
The tanks are assembled by joining previously manufactured dome, ring and barrel components together in the Vertical Assembly Center by a process known as friction stir welding. The rings connect and provide stiffness between the domes and barrels.
The LH2 tank is the largest major part of the SLS core stage. It holds 537,000 gallons of super chilled liquid hydrogen. It is comprised of 5 barrels, 2 domes, and 2 rings.
The LOX tank holds 196,000 pounds of liquid oxygen. It is assembled from 2 barrels, 2 domes, and 2 rings and measures over 50 feet long.
The maiden test flight of the SLS/Orion is targeted for no later than November 2018 and will be configured in its initial 70-metric-ton (77-ton) Block 1 configuration with a liftoff thrust of 8.4 million pounds – more powerful than NASA’s Saturn V moon landing rocket.
Although the SLS-1 flight in 2018 will be uncrewed, NASA plans to launch astronauts on the SLS-2/EM-2 mission slated for the 2021 to 2023 timeframe.
NASA’s Space Launch System (SLS) blasts off from launch pad 39B at the Kennedy Space Center in this artist rendering showing a view of the liftoff of the Block 1 70-metric-ton (77-ton) crew vehicle configuration. Credit: NASA/MSFC
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
The newly assembled first liquid hydrogen tank, also called the qualification test article, for NASA’s new Space Launch System (SLS) heavy lift rocket lies horizontally beside the Vertical Assembly Center robotic weld machine (blue) on July 22, 2016. It was lifted out of the welder (top) after final welding was just completed at NASA’s Michoud Assembly Facility in New Orleans. Credit: Ken Kremer/kenkremer.com
Apollo 11 moonwalker Buzz Aldrin discusses the human ‘Journey to Mars with Universe Today at newly opened ‘Destination Mars’ holographic experience during media preview at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit: Ken Kremer/kenkremer.com
Apollo 11 moonwalker Buzz Aldrin discusses the human ‘Journey to Mars with Universe Today at newly opened ‘Destination Mars’ holographic experience during media preview at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit: Ken Kremer/kenkremer.com
KENNEDY SPACE CENTER VISITOR COMPLEX, FL – Sending humans on a ‘Journey to Mars’ and developing strategies and hardware to accomplish the daunting task of getting ‘Humans to Mars’ is NASA’s agency wide goal and the goal of many space enthusiasts – including Apollo 11 moonwalker Buzz Aldrin.
NASA is going full speed ahead developing the SLS Heavy lift rocket and Orion crew module with a maiden uncrewed launch from the Kennedy Space Center set for late 2018 to the Moon. Crewed Mars missions would follow by the 2030s.
In the marketplace of ideas, there are other competing and corollary proposals as well from government, companies and private citizens on pathways to the Red Planet. For example SpaceX CEO Elon Musk wants to establish a colony on Mars using an Interplanetary Transport System of SpaceX developed rockets and spaceships.
Moonwalker Aldrin strongly advocated for more commercial activity in space and that “exposure to microgravity” for “many commercial products” is good, he told Universe Today.
More commercial activities in space would aid space commerce and getting humans to Mars.
“We need to do that,” Aldrin told me.
Apollo 11 moonwalker Buzz Aldrin describes newly opened ‘Destination Mars’ holographic experience during media preview at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit: Ken Kremer/kenkremer.com
Buzz Aldrin is the second man to set foot on the Moon. He stepped onto the lunar soil a few minutes after Apollo 11 Commander Neil Armstrong, on July 20, 1969 in the Sea of Tranquility.
Aldrin also strongly supports some type of American space station capability “beyond the ISS” to foster the Mars capability.
And we need to be thinking about that follow on “US capability” right now!
“I think we need to have a US capability beyond the ISS to prepare for future activities right from the beginning,” Aldrin elaborated.
Currently the ISS partnership of the US, Russia, ESA, Japan and Canada has approved extending the operations of the International Space Station (ISS) until 2024. What comes after that is truly not known.
NASA is not planning for a follow-on space station in low Earth orbit at this time. The agency seems to prefer development of a commercial space station, perhaps with core modules from Bigelow Aerospace and/or other companies.
So that commercial space station will have to be designed, developed and launched by private companies. NASA and others would then lease space for research and other commercial activities and assorted endeavors on the commercial space station.
For example, Bigelow wants to dock their privately developed B330 habitable module at the ISS by 2020, following launch on a ULA Atlas V. And then spin it off as an independent space station when the ISS program ends – see my story.
Only China has firm plans for a national space station in the 2020’s. And the Chinese government has invited other nations to submit proposals. Russia’s ever changing space exploration plans may include a space station – but that remains to be actually funded and seen.
Regarding Mars, Aldrin has lectured widely and written books about his concept for “cycling pathways to occupy Mars,” he explained.
Watch this video of Apollo 11 moonwalker Buzz Aldrin speaking to Universe Today:
Video Caption: Buzz Aldrin at ‘Destination Mars’ Grand Opening at KSCVC. Apollo 11 moonwalker Buzz Aldrin talks to Universe Today/Ken Kremer during Q&A at ‘Destination Mars’ Holographic Exhibit Grand Opening ceremony at Kennedy Space Center Visitor Complex (KSCVC) in Florida on 9/18/16. Credit: Ken Kremer/kenkremer.com
Here is a transcript:
Universe Today/Ken Kremer: Can you talk about the role of commercial space [in getting humans to Mars]. Elon Musk wants to try and send people to Mars, maybe even before NASA. What do you think?
Buzz Aldrin: “Well, being a transportation guy in space for humans – well commercial, what that brings to mind is tourism plus space travel.
And there are many many more things commercial that are done with products that can be fine tuned by exposure to microgravity. And we need to do that.”
“I think we need to have a US capability beyond the ISS to prepare for future activities right from the beginning.”
“And that’s why what has sort of fallen into place is the name for my plan for the future – which is ‘cycling pathways to occupy Mars.’”
“A cycler in low Earth orbit, one in lunar orbit, and one to take people to Mars.”
“And they are utilized in evolutionary fashion.”
Apollo 11 moonwalker Buzz Aldrin during media preview of newly opened ‘Destination Mars’ holographic experience at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit Julian Leek
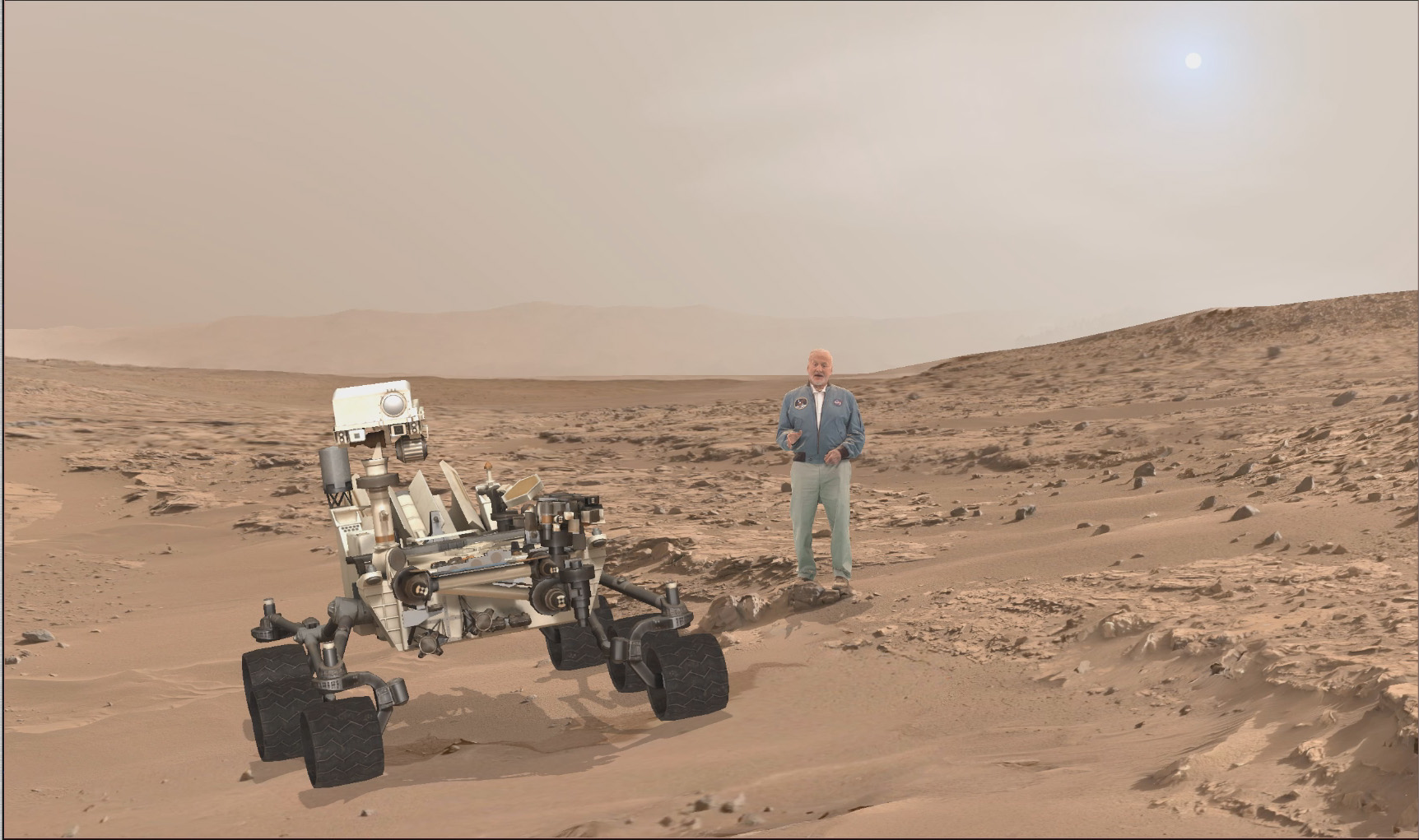
Meanwhile, be sure to visit the absolutely spectacular “Destination Mars” holographic exhibit before it closes on New Year’s Day 2017 – because it is only showing at KSCVC.
A scene from ‘Destination Mars’ of Buzz Aldrin and NASA’s Curiosity Mars rover with the Gale crater rim in the distance. The new, limited time interactive exhibit is now showing at the Kennedy Space Center visitor complex in Florida through Jan 1, 2017. Credit: NASA/JPL/Microsoft
You can get more information or book a visit to Kennedy Space Center Visitor Complex, by clicking on the website link:
Apollo 11 moonwalker Buzz Aldrin discusses the human ‘Journey to Mars with Universe Today at newly opened ‘Destination Mars’ holographic experience during media preview at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit: Ken Kremer/kenkremer.com
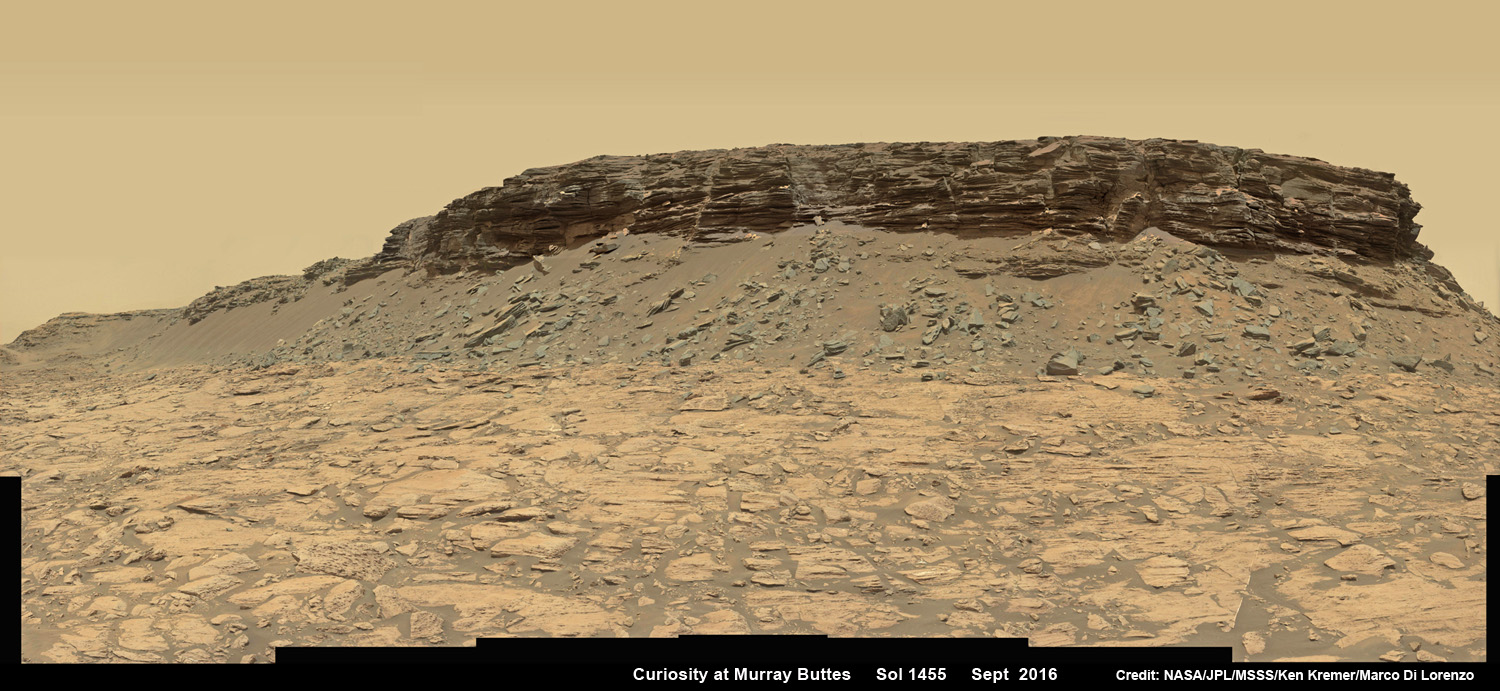
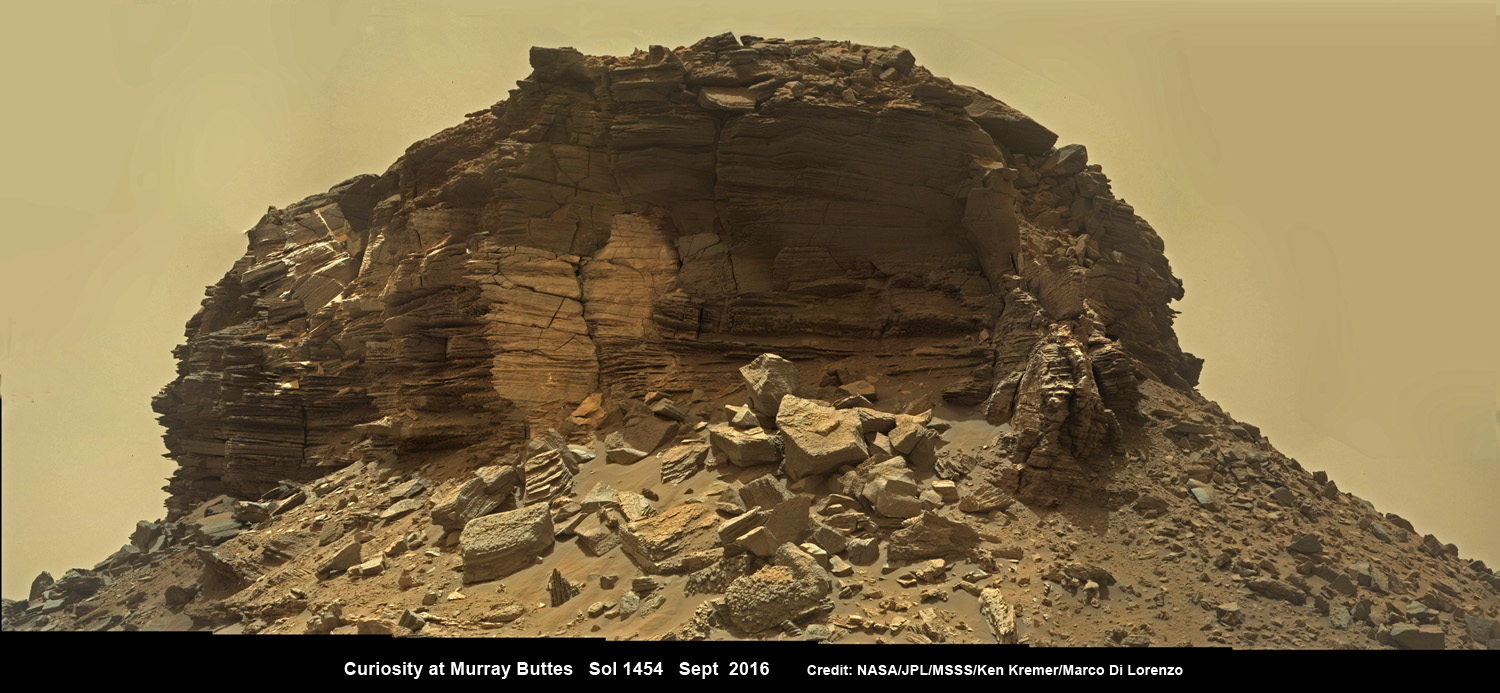
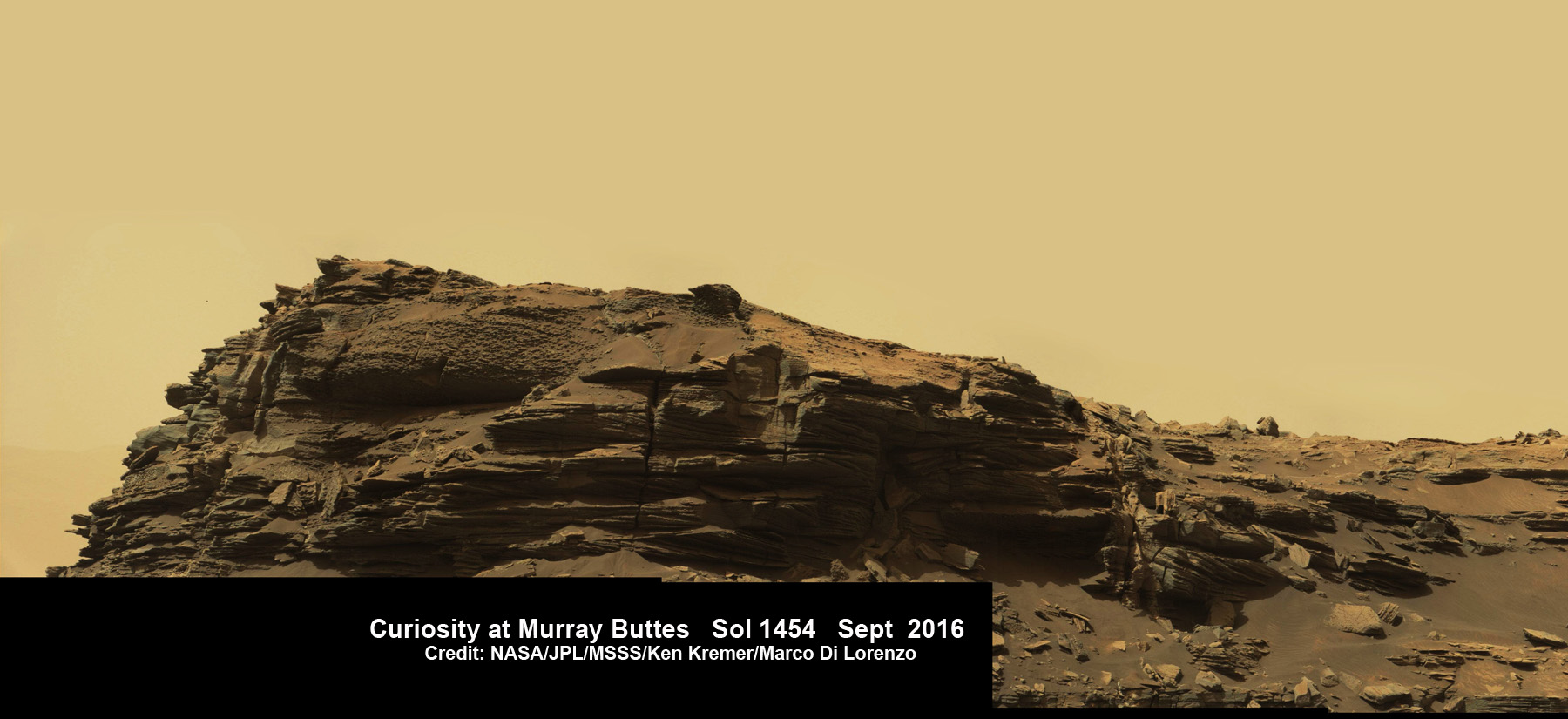
Dramatic wide angle mosaic view of butte with sandstone layers showing cross-bedding in the Murray Buttes region on lower Mount Sharp with distant view to rim of Gale crater, taken by Curiosity rover’s Mastcam high resolution cameras. This photo mosaic was assembled from Mastcam color camera raw images taken on Sol 1454, Sept. 8, 2016 and stitched by Ken Kremer and Marco Di Lorenzo, with added artificial sky. Featured at APOD on 5 Oct 2016. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Dramatic wide angle mosaic view of butte with sandstone layers showing cross-bedding in the Murray Buttes region on lower Mount Sharp with distant view to rim of Gale crater, taken by Curiosity rover’s Mastcam high resolution cameras. This photo mosaic was assembled from Mastcam color camera raw images taken on Sol 1454, Sept. 8, 2016 and stitched by Ken Kremer and Marco Di Lorenzo, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
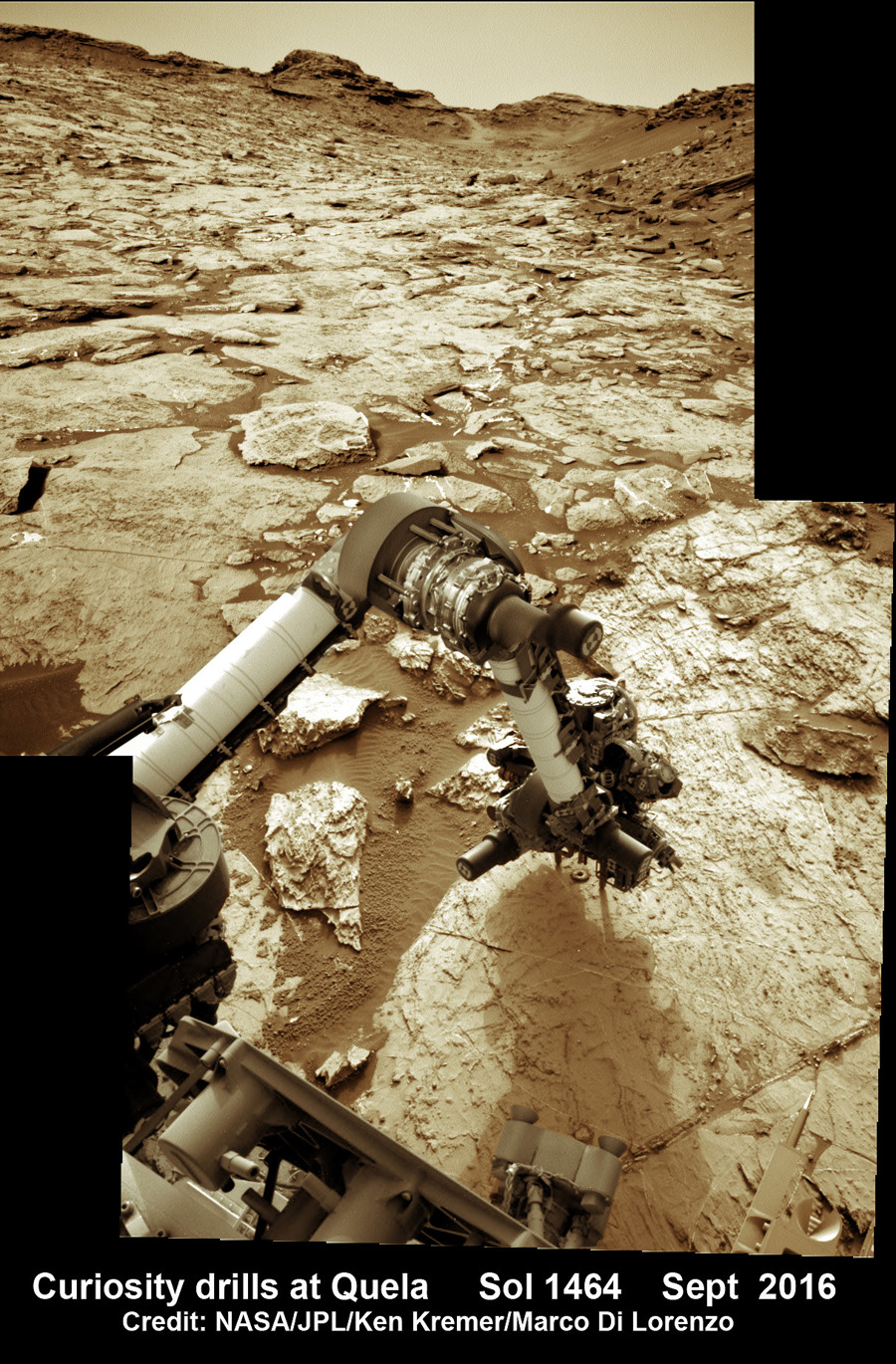
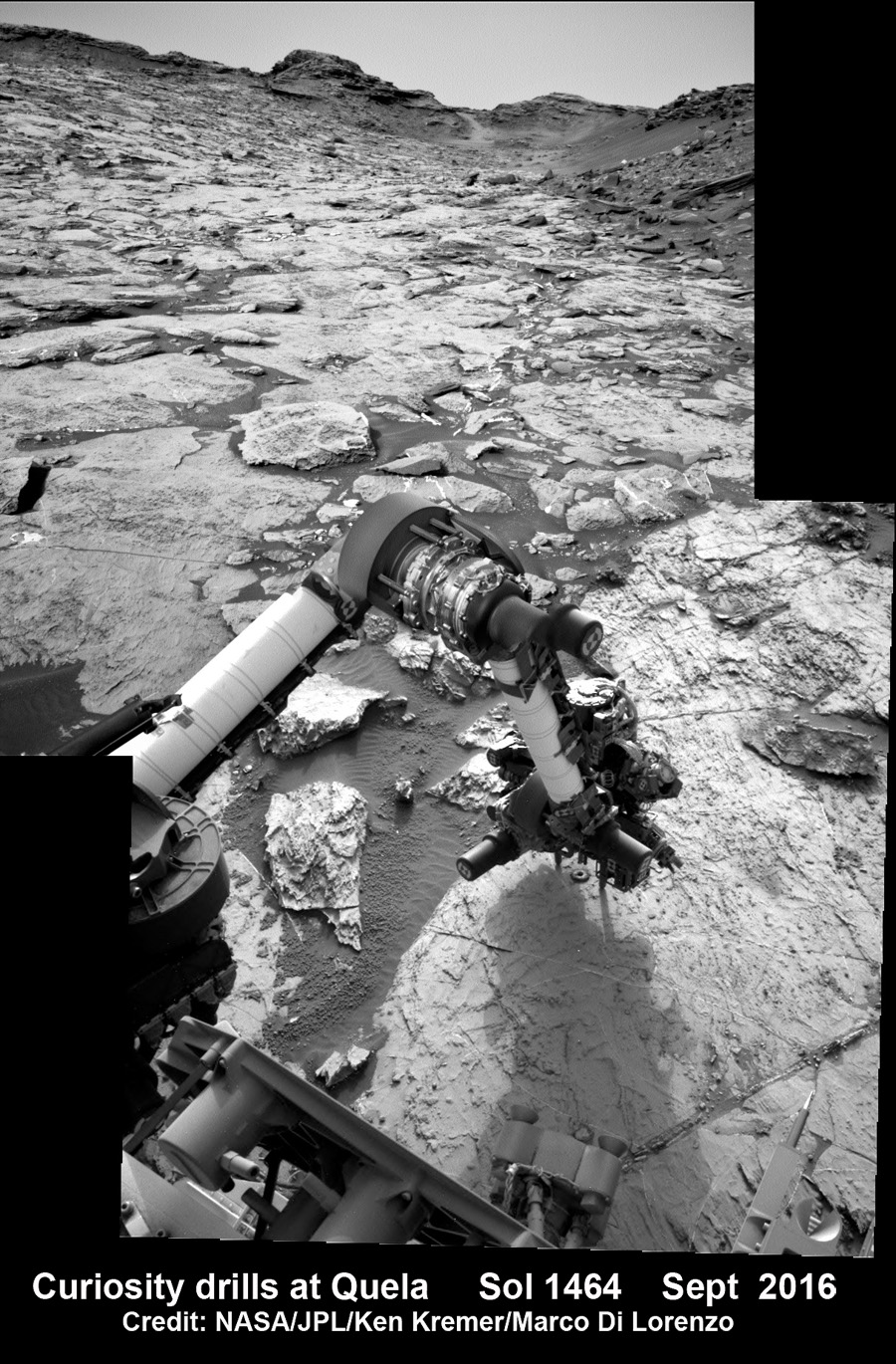
Our beyond magnificent Curiosity rover has just finished her latest Red Planet drilling campaign – at the rock target called “Quela” – into the simply unfathomable alien landscapes she is currently exploring at the “Murray Buttes” region of lower Mount Sharp. And it’s all in a Sols (or Martian Day’s) work for our intrepid Curiosity!
“These images are literally out of this world.. I don’t think I have seen anything like them on Earth!” Jim Green, Planetary Sciences Director at NASA Headquarters, Washington, D.C., explained to Universe Today.
The “Murray Buttes” region is just chock full of the most stunning panoramic vistas that NASA’s Curiosity Mars Science Laboratory rover has come upon to date. Observe and enjoy them in our exclusive new photo mosaics above and below.
“We always try to find some sort of Earth analog but these make exploring another world all worth it!” Green gushed in glee.
They fill the latest incredible chapter in her thus far four year long quest to trek many miles (km) from the Bradbury landing site across the floor of Gale Crater to reach the base region of humongous Mount Sharp.
And these adventures are just a prelude to the even more glorious vistas she’ll investigate from now on – as she climbs higher and higher on an expedition to thoroughly examine the mountains sedimentary layers and unravel billions and billions of years of Mars geologic and climatic history.
Drilling holes into Mars during the Red Planet trek and carefully analyzing the pulverized samples with the rovers pair of miniaturized chemistry laboratories (SAM and CheMin) is the route to the answer of how and why Mars changed from a warmer and wetter planet in the ancient past to the cold, dry and desolate world we see today.
The rock target named “Quela” is located at the base of one of the buttes dubbed “Murray Butte number 12,” according to the latest mission update from Prof. John Bridges, a Curiosity rover science team member from the University of Leicester, England.
It took two tries to get the drilling done due to a technical issue, but all went well in the end and it was well worth the effort at a place never before explored by an emissary from Earth.
“The drill (successful at second attempt) is at Quela.”
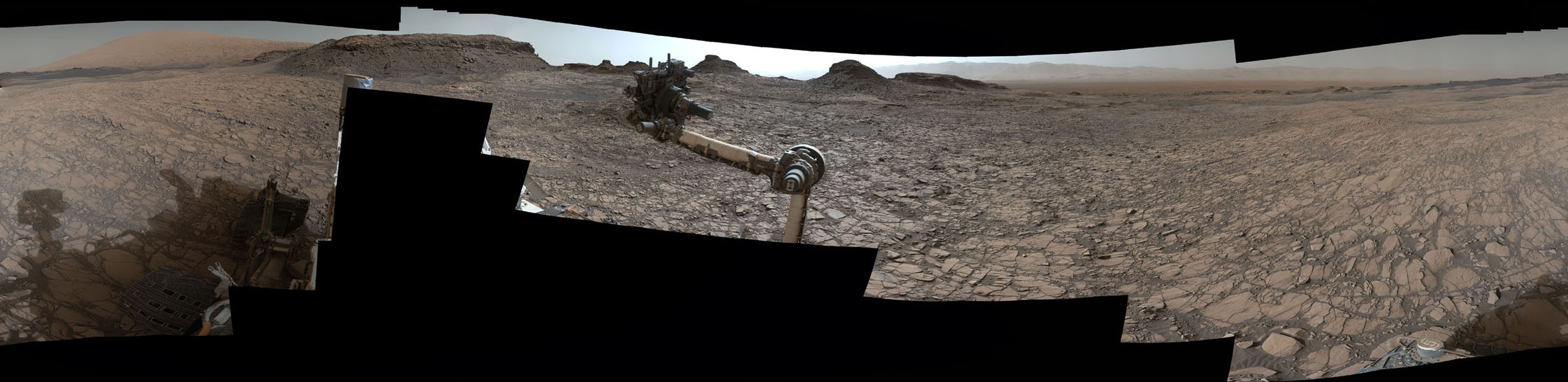
The full depth drilling was completed on Sol 1464, Sept. 18, 2016 using the percussion drill at the terminus of the outstretched 7-foot-long (2-meter-long) robotic arm – as confirmed by imaging and further illustrated in our navcam camera photo mosaic.
And that immediately provided valuable insight into climate change on Mars.
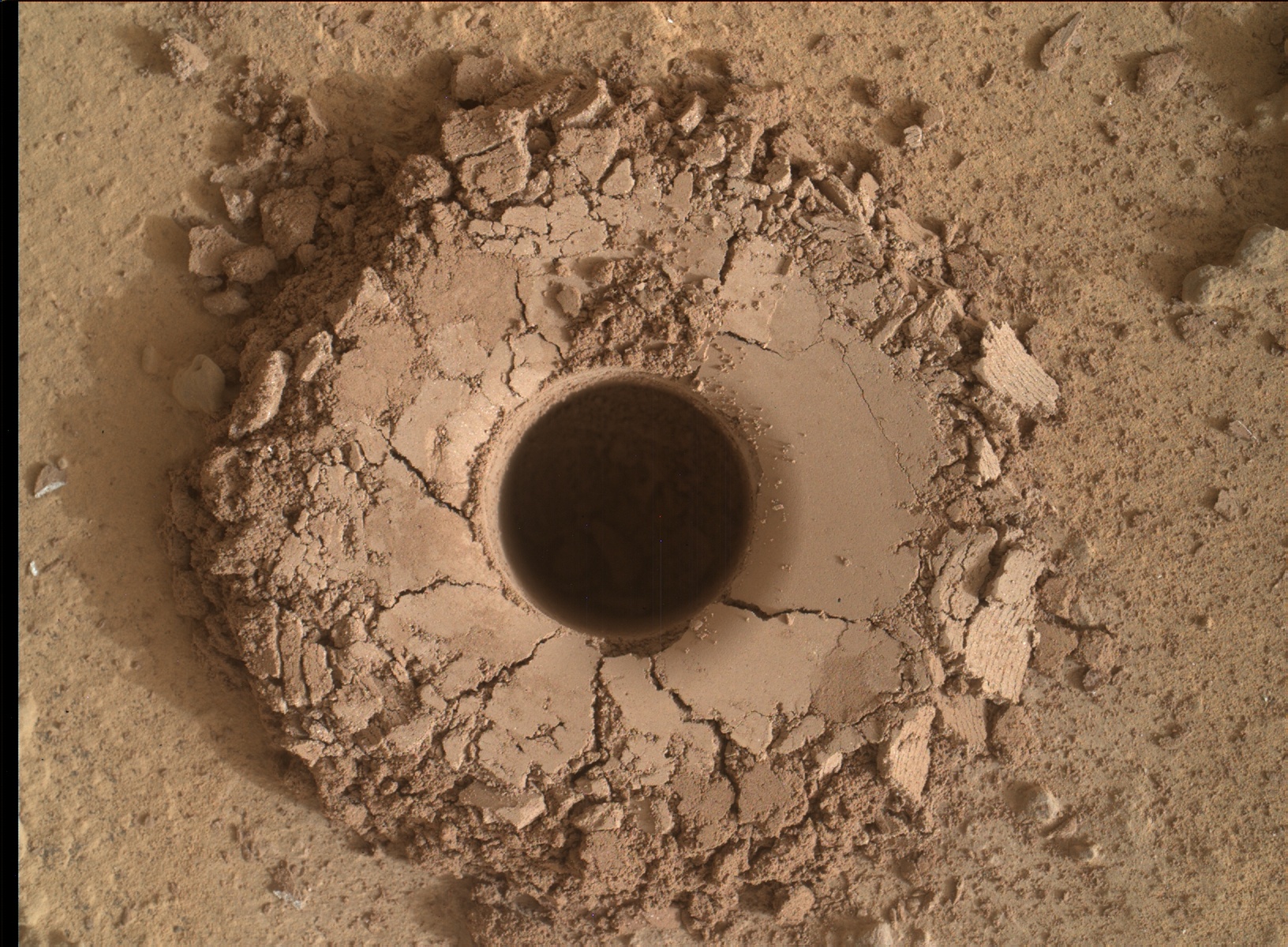
“You can see how red and oxidised the tailings are, suggesting changing environmental conditions as we progress through the Mt. Sharp foothills,” Bridges explained in the mission update.
Curiosity bore holes measure approximately 0.63 inch (1.6 centimeters) in diameter and 2.6 inches (6.5 centimeters) deep.
Quela drill hole bored by Curiosity rover on Sol 1464, Sept. 18, 2016 as seen in this collage of Mastcam and MAHLI raw color images taken on Sol 1465. Image Credit: NASA/JPL/MSSS. Collage: Marco Di Lorenzo/Ken Kremer
To give you the context of the Murray Buttes region and the drilling at Quela, the image processing team of Ken Kremer and Marco Di Lorenzo has begun stitching together wide angle mosaic landscape views and up close views of the drilling using raw images from the variety of cameras at Curiosity’s disposal.
The next steps after boring into Quela were to “sieve the new sample, dump the unsieved fraction, and drop some of the sieved sample into CheMin,” says Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
“But first, ChemCam will acquire passive spectra of the Quela drill tailings and use its laser to measure the chemistry of the wall of the new drill hole and of bedrock targets “Camaxilo” and “Okakarara.” Right Mastcam images of these targets are also planned.”
“After sunset, MAHLI will use its LEDs to take images of the drill hole from various angles and of the CheMin inlet to confirm that the sample was successfully delivered. Finally, the APXS will be placed over the drill tailings for an overnight integration.”
The rover had approached the butte from the south side several sols earlier to get in place, plan for the drilling, take imagery to document stratigraphy and make compositional observations with the ChemCam laser instrument.
Curiosity drills into Quela rock target in the Murray Buttes region on Sol 1464, Sept. 18, 2016, in this navcam camera mosaic, stitched from raw images and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“These are the landforms that dominate the landscape at this point in the traverse – The Murray Buttes,” says Bridges.
Wide angle mosaic view shows spectacular buttes and layered sandstone in the Murray Buttes region on lower Mount Sharp from the Mastcam cameras on NASA’s Curiosity Mars rover. This photo mosaic was assembled from Mastcam color camera raw images taken on Sol 1455, Sept. 9, 2016 and stitched by Marco Di Lorenzo and Ken Kremer, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
What are the Murray Buttes?
“These are formed by a cap of hard aeolian rock that has been partially eroded back, overlying the Murray mudstone.”
The imagery of the Murray Buttes and mesas show them to be eroded remnants of ancient sandstone that originated when winds deposited sand after lower Mount Sharp had formed.
Scanning around the Murray Buttes mosaics one sees finely layered rocks, sloping hillsides, the distant rim of Gale Crater barely visible through the dusty haze, dramatic hillside outcrops with sandstone layers exhibiting cross-bedding.
The presence of “cross-bedding” indicates that the sandstone was deposited by wind as migrating sand dunes, says the team.
Spectacular wide angle mosaic view showing sloping buttes and layered outcrops within the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched from Mastcam camera raw images taken on Sol 1454, Sept. 9, 2016 with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity spent some six weeks or so traversing and exploring the Murray Buttes.
So after collecting all that great drilling data at Quela, the team is ready for even more spectacular new adventures!
“While the Murray Buttes were spectacular and interesting, it’s good to be back on the road again, as there is much more of Mt. Sharp to explore!” concludes Herkenhoff.
And the team is already commanding Curiosity to drive ahead in hot pursuit of the next drill target!
Dramatic hillside view showing sloping buttes and layered outcrops within of the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched and cropped from Mastcam camera raw images taken on Sol 1454, Sept. 8, 2016, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
Three years ago, the team informally named the Murray Buttes site to honor Caltech planetary scientist Bruce Murray (1931-2013), a former director of NASA’s Jet Propulsion Laboratory, Pasadena, California. JPL manages the Curiosity mission for NASA.
As of today, Sol 1470, September 24, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing inside Gale Crater, and taken over 355,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Wide angle mosaic shows lower region of Mount Sharp at center in between spectacular sloping hillsides and layered rock outcrops of the Murray Buttes region in Gale Crater as imaged by the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched from Mastcam camera raw images taken on Sol 1451, Sept. 5, 2016 with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di LorenzoQuela drill hole bored by Curiosity rover on Sol 1464, Sept. 18, 2016 as seen in this MAHLI arm camera raw color image taken the same Sol. Credit: NASA/JPL/MSSSCuriosity drills into Quela rock target on Sol 1464, Sept. 18, 2016 in this navcam camera mosaic. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
A scene from ‘Destination Mars’ of Buzz Aldrin and NASA’s Curiosity Mars rover with the Gale crater rim in the distance. The new, limited time interactive exhibit is now showing at the Kennedy Space Center visitor complex in Florida through Jan 1, 2017. Credit: NASA/JPL/Microsoft
A scene from ‘Destination Mars’ of Buzz Aldrin and NASA’s Curiosity Mars rover with the Gale crater rim in the distance. The new, limited time interactive exhibit is now showing at the Kennedy Space Center visitor complex in Florida through Jan 1, 2017. Credit: NASA/JPL/Microsoft
KENNEDY SPACE CENTER VISITOR COMPLEX, FL- Think a Holodeck adventure on Star Trek guided by real life Apollo 11 moonwalker Buzz Aldrin and you’ll get a really good idea of what’s in store for you as you explore the surface of Mars like never before in the immersive new ‘Destination Mars’ interactive holographic exhibit opening to the public today, Monday, Sept.19, at the Kennedy Space Center visitor complex in Florida.
The new Red Planet exhibit was formally opened for business during a very special ribbon cutting ceremony featuring Buzz Aldrin as the star attraction – deftly maneuvering the huge ceremonial scissors during an in depth media preview and briefing on Sunday, Sept. 18, 2016, including Universe Today.
The fabulous new ‘Destination Mars’ limited engagement exhibit magically transports you to the surface of the Red Planet via Microsoft HoloLens technology.
It literally allows you to ‘Walk on Mars’ using real imagery taken by NASA’s Mars Curiosity rover and explore the alien terrain, just like real life scientists on a geology research expedition.
A ceremonial ribbon is cut for the opening of new “Destination: Mars” experience at the Kennedy Space Center visitor complex in Florida during media preview on Sept. 18, 2016. From the left are Therrin Protze, chief operating officer of the visitor complex; center director Bob Cabana; Apollo 11 astronaut Buzz Aldrin; Kudo Tsunoda of Microsoft; and Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California. Credit: Ken Kremer/kenkremer.com
“Technology like HoloLens leads us once again toward exploration,” Aldrin said during the Sept. 18 media preview. “It’s my hope that experiences like “Destination: Mars” will continue to inspire us to explore.”
Destination Mars was jointly developed by NASA’s Jet Propulsion Laboratory – which manages the Curiosity rover mission for NASA – and Microsoft HoloLens.
A ceremonial ribbon is cut for the opening of new “Destination: Mars” experience at the Kennedy Space Center visitor complex in Florida during media preview on Sept. 18, 2016. From the left are Therrin Protze, chief operating officer of the visitor complex; center director Bob Cabana; Apollo 11 astronaut Buzz Aldrin; Kudo Tsunoda of Microsoft; and Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California. Credit: Dawn Taylor Leek
Buzz was ably assisted at the grand ribbon cutting ceremony by Bob Cabana, former shuttle commander and current Kennedy Space Center Director, Therrin Protze, chief operating officer of the visitor complex, Kudo Tsunoda of Microsoft, and Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California.
The experience is housed in a pop-up theater that only runs for the next three and a half months, until New Years Day, January 1, 2017.
Before entering the theater, you will be fitted with specially adjusted HoloLens headsets individually tailored to your eyes.
The entire ‘Destination Mars’ experience only lasts barely 8 minutes.
So, if you are lucky enough to get a ticket inside you’ll need to take advantage of every precious second to scan around from left and right and back, and top to bottom. Be sure to check out Mount Sharp and the rim of Gale Crater.
You’ll even be able to find a real drill hole that Curiosity bored into the Red Planet at Yellowknife Bay about six months after the nailbiting landing in August 2012.
During your experience you will be guided by Buzz and Curiosity rover driver Erisa Hines of JPL. They will lead you to areas of Mars where the science team has made many breakthrough discoveries such as that liquid water once flowed on the floor of Curiosity’s Gale Crater landing site.
Curiosity rover driver Erisa Hines and Jeff Norris of NASA’s Jet Propulsion Laboratory at the grand opening for Destination Mars at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit Julian Leek
The scenes come to life based on imagery combining the Mastcam color cameras and the black and white navcam cameras, Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California, told Universe Today in an interview.
Among the surface features visited is Yellowknife Bay where Curiosity conducted the first interplanetary drilling and sampling on another planet in our Solar System. The sample were subsequently fed to and analyzed by the pair of miniaturized chemistry labs – SAM and CheMin – inside the rovers belly.
They also guide viewers to “a tantalizing glimpse of a future Martian colony.”
“The technology that accomplishes this is called “mixed reality,” where virtual elements are merged with the user’s actual environment, creating a world in which real and virtual objects can interact, “ according to a NASA description.
“The public experience developed out of a JPL-designed tool called OnSight. Using the HoloLens headset, scientists across the world can explore geographic features on Mars and even plan future routes for the Curiosity rover.”
Curiosity is currently exploring the spectacular looking buttes in the Murray Buttes region in lower Mount Sharp. Read my recent update here.
A scene from ‘Destination Mars’ of Erisa Hines and NASA’s Curiosity Mars rover with Mount Sharp Gale crater rim in the distance. The new, limited time interactive exhibit is now showing at the Kennedy Space Center visitor complex in Florida through Jan 1, 2017. Credit: NASA/JPL/Microsoft
Be sure to pay attention or your discovery walk on Mars will be over before you know it. Personally, as a Mars lover and Mars mosaic maker I was thrilled by the 3 D reality and I was ready for more.
Curiosity accomplished Historic 1st drilling into Martian rock at John Klein outcrop on Feb 8, 2013 (Sol 182) and discovered a habitable zone, shown in this context mosaic view of the Yellowknife Bay basin taken on Jan. 26 (Sol 169). The robotic arm is pressing down on the surface at John Klein outcrop of veined hydrated minerals – dramatically back dropped with her ultimate destination; Mount Sharp. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
This limited availability, timed experience is available on a first-come, first-served basis. Reservations must be made the day of your visite at the Destination: Mars reservation counter, says the KSC Visitor Complex (KSCVC).
You can get more information or book a visit to Kennedy Space Center Visitor Complex, by clicking on the website link:
Be sure to visit this spectacular holographic exhibit before it closes on New Year’s Day 2017 because it is only showing at KSCVC.
There are no plans to book it at other venues, Norris told me.
Apollo 11 moonwalker Buzz Aldrin describes newly opened ‘Destination Mars’ holographic experience during media preview at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit: Ken Kremer/kenkremer.com
As of today, Sol 1465, September 19, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing inside Gale Crater, and taken over 354,000 amazing images.
Apollo 11 moonwalker Buzz Aldrin during media preview of newly opened ‘Destination Mars’ holographic experience at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit Julian Leek
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Dramatic hillside view showing sloping buttes and layered outcrops within of the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA's Curiosity Mars rover. This photo mosaic is stitched and cropped from Mastcam camera raw images taken on Sol 1454, Sept. 8, 2016, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Spectacular wide angle mosaic view showing sloping buttes and layered outcrops within the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched from Mastcam camera raw images taken on Sol 1454, Sept. 8, 2016 with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
The most stunning panoramic vistas likely ever snapped by NASA’s Curiosity rover reveal spectacularly layered Martian rock formations in such exquisite detail that they look and feel just like America’s desert Southwest landscapes. They were just captured a week ago and look like a scene straight out of the hugely popular science fiction movie ‘The Martian’ – only they are real !!
Indeed several magnificent panoramas were taken by Curiosity in just the past week and you can see our newly stitched mosaic versions of several – above and below.
The rock formations lie in the “Murray Buttes” region of lower Mount Sharp where Curiosity has been exploring for roughly the past month. She just finished a campaign of detailed science observations and is set to bore a new sampling hole into the Red Planet, as you read this.
While scouting around the “Murray Buttes,” the SUV sized rover captured thousands of color and black and white raw images to document the geology of this thus far most unrivaled spot on the Red Planet ever visited by an emissary from Earth.
So the image processing team of Ken Kremer and Marco Di Lorenzo has begun stitching together wide angle mosaic views starting with images gathered by the high resolution mast mounted Mastcam right color camera, or M-100, on Sept, 8, 2016, or Sol 1454 of the robots operations on Mars.
Dramatic closeup mosaic view of Martian butte with sandstone layers showing cross-bedding in the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched from Mastcam camera raw images taken on Sol 1454, Sept. 8, 2016, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
The mosaics give context and show us exactly what the incredible alien surroundings look like where the six wheeled rover is exploring today.
The imagery of the Murray Buttes and mesas show them to be eroded remnants of ancient sandstone that originated when winds deposited sand after lower Mount Sharp had formed.
Wide angle mosaic shows lower region of Mount Sharp at center in between spectacular sloping hillsides and layered rock outcrops of the Murray Buttes region in Gale Crater as imaged by the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched from Mastcam camera raw images taken on Sol 1451, Sept. 5, 2016 with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Scanning around the Murray Buttes mosaics one sees finely layered rocks, sloping hillsides, the distant rim of Gale Crater barely visible through the dusty haze, dramatic hillside outcrops with sandstone layers exhibiting cross-bedding. The presence of “cross-bedding” indicates that the sandstone was deposited by wind as migrating sand dunes, says the team.
Wide angle mosaic view shows spectacular buttes and layered sandstone in the Murray Buttes region on lower Mount Sharp from the Mastcam cameras on NASA’s Curiosity Mars rover. This photo mosaic was assembled from Mastcam color camera raw images taken on Sol 1455, Sept. 9, 2016 and stitched by Marco Di Lorenzo and Ken Kremer, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
But there is no time to rest as she was commanded to head further south to the last of these Murray Buttes. And right now the team is implementing a plan for Curiosity to drill a new hole in Mars today – at a target named “Quela” at the base of the last of the buttes. The rover approached the butte from the south side a few days ago to get in place and plan for the drilling, take imagery to document stratigraphy and make compositional observations with the ChemCam laser instrument.
“It’s always an exciting day on Mars when you prepare to drill another sample – an engineering feat that we’ve become so accustomed to that I sometimes forget how impressive this really is!” wrote Lauren Edgar, in a mission update today. Edgar is a Research Geologist at the USGS Astrogeology Science Center and a member of the MSL science team.
Curiosity will then continue further south to begin exploring higher and higher sedimentary layers up Mount Sharp. The “Murray Buttes” are the entry way along Curiosity’s planned route up lower Mount Sharp.
Dramatic closeup view of hillside outcrop with sandstone layers showing cross-bedding in the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched and cropped from Mastcam camera raw images taken on Sol 1454, Sept. 8, 2016, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Meanwhile Curiosity is still conducting science observations of the last drill sample gathered from the “Marimba” target in August focusing on MAHLI and APXS examination of the dump pile leftovers from the sieved sample. She just completed chemical analysis of the sieved sample using the miniaturized SAM and CheMin internal chemistry laboratories.
It’s interesting to note that although the buttes are striking, their height also presents communications issues by blocking radio signals with NASA’s orbiting relay satellites. NASA’s Opportunity rover faced the same issues earlier this year while exploring inside the high walled Marathon Valley along Ecdeavour Crater.
“While the buttes are beautiful, they pose a challenge to communications, because they are partially occluding communications between the rover and the satellites we use to relay data (MRO and ODY), so sometimes the data volume that we can relay is pretty low” wrote Edgar.
“But it’s a small price to pay for the great stratigraphic exposures and gorgeous view!”
Dramatic hillside view showing sloping buttes and layered outcrops within of the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched and cropped from Mastcam camera raw images taken on Sol 1454, Sept. 8, 2016, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
Three years ago, the team informally named the Murray Buttes site to honor Caltech planetary scientist Bruce Murray (1931-2013), a former director of NASA’s Jet Propulsion Laboratory, Pasadena, California. JPL manages the Curiosity mission for NASA.
As of today, Sol 1461, September 15, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing inside Gale Crater, and taken over 353,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
This 360-degree panorama was acquired by the Mast Camera (Mastcam) on NASA's Curiosity Mars rover as the rover neared features called "Murray Buttes" on lower Mount Sharp. Credit: NASA/JPL-Caltech/MSSS
This 360-degree panorama was acquired by the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover as the rover neared features called “Murray Buttes” on lower Mount Sharp. Credit: NASA/JPL-Caltech/MSSS
This is a key milestone for the Curiosity mission because the “Murray Buttes” are the entry way along Curiosity’s planned route up lower Mount Sharp.
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
The area features eroded mesas and buttes that are reminiscent of the U.S. Southwest.
So the team directed the rover to capture a 360-degree color panorama using the robots mast mounted Mastcam camera earlier this month on Aug. 5.
The full panorama shown above combines more than 130 images taken by Curiosity on Aug. 5, 2016, during the afternoon of Sol 1421 by the Mastcam’s left-eye camera.
In particular note the dark, flat-topped mesa seen to the left of the rover’s arm. It stands about 50 feet (about 15 meters) high and, near the top, about 200 feet (about 60 meters) wide.
Coincidentally, Aug. 5 also marks the fourth anniversary of the six wheeled rovers landing on the Red Planet via the unprecedented Sky Crane maneuver.
You can explore this spectacular Mars panorama in great detail via this specially produced 360-degree panorama from JPL. Simply move the magnificent view back and forth and up and down and all around with your mouse or mobile device.
Video Caption: This 360-degree panorama was acquired on Aug. 5, 2016, by the Mastcam on NASA’s Curiosity Mars rover as the rover neared features called “Murray Buttes” on lower Mount Sharp. The dark, flat-topped mesa seen to the left of the rover’s arm is about 50 feet (about 15 meters) high and, near the top, about 200 feet (about 60 meters) wide.
“The buttes and mesas are capped with rock that is relatively resistant to wind erosion. This helps preserve these monumental remnants of a layer that formerly more fully covered the underlying layer that the rover is now driving on,” say rover scientists.
“The relatively flat foreground is part of a geological layer called the Murray formation, which formed from lakebed mud deposits. The buttes and mesas rising above this surface are eroded remnants of ancient sandstone that originated when winds deposited sand after lower Mount Sharp had formed. Curiosity closely examined that layer — the Stimson formation — during the first half of 2016 while crossing a feature called “Naukluft Plateau” between two exposures of the Murray formation.”
Three years ago, the team informally named the site to honor Caltech planetary scientist Bruce Murray (1931-2013), a former director of NASA’s Jet Propulsion Laboratory, Pasadena, California. JPL manages the Curiosity mission for NASA.
As of today, Sol 1447, August 31, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing, and taken over 348,500 amazing images.
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 – backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.