
Mars rovers have spearheaded the exploration of the planet over the last 20 years. MSL Curiosity and Perseverance are awe-inspiring machines, and Spirit and Opportunity were similarly impressive. Collectively, they've greatly improved our understanding of Mars and its ancient climate and shed light on its potential ancient habitability.
But according to new research, the next step could involve smaller, more autonomous, four-legged rovers. These vehicles would carry only a couple of science instruments, yet could still deliver powerful results.
The research is titled "Semi-autonomous exploration of martian and lunar analogues with a legged robot using a Raman-equipped robotic arm and microscopic imager." It's published in Frontiers in Space Technologies and the lead author is Gabriela Ligeza. Ligeza is a post-doctoral researcher with the European Space Agency.
"Traditional single-target, human-supervised robot and instrument control methodologies are constrained by operational limitations, particularly on Mars, where long communication delays hinder real-time decision-making," the authors write. "This study explores an alternative semi-autonomous, multi-target exploration strategy using a legged robotic system, which could enable faster, more efficient surface prospecting on the Moon and Mars."
The primary problem in Mars rover exploration is the distance between Earth and Mars and the time it takes to communicate with rovers. The average time for a return radio communication with Mars is about 25 minutes, and can be much longer, up to 44 minutes (It can also be as short as six minutes.) The semi-autonomous nature of these proposed robots means they can do more on their own without needing as many navigation instructions. This allows them to study more targets in a short length of time, making them multi-target.
Ligeza and her colleagues tested their ideas in Martian and Lunar analogue missions. They used a legged robot called ANYmal an autonomous robot designed for industrial applications. The ANYmal they tested has a microscopic imager (MICRO) and a Raman spectrometer (MIRA XTR, Metrohm, Switzerland) mounted on a robotic arm. Their legs allow them to navigate and explore uneven terrain. They're also capable of limited climbing actions.
The researchers tested the feasibility of using the robot's semi-autonomous operation to visit and test sample multiple targets without detailed human instructions. Then they compared those results with results from more conventional human-supervised, single target exploration. The researchers also tested how effective the particular pairing of MICRO with the Raman spectrometer is at identifying Martian and Lunar analogue samples in the testing environment.
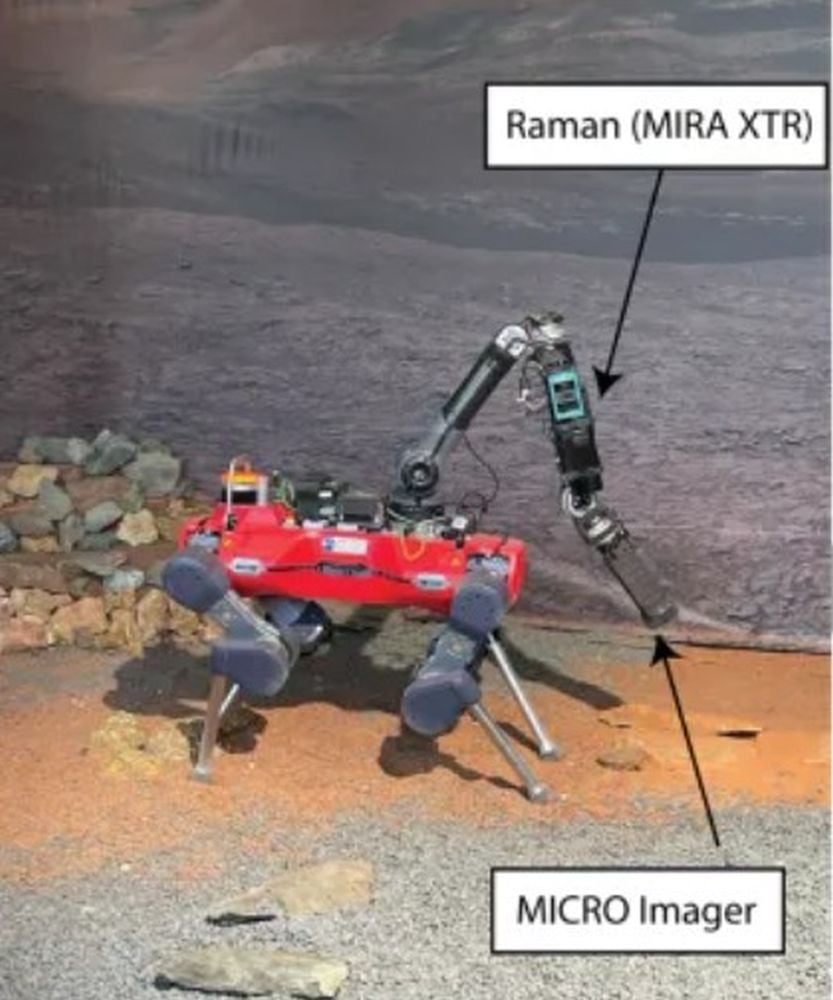 The ANYmal four-legged robot during testing. The robot has a single robotic arm that carries only two instruments: a microscopic imager and a Raman spectrometer. Image Credit: Ligeza et al. 2026. Frontiers in Space Technologies.
The ANYmal four-legged robot during testing. The robot has a single robotic arm that carries only two instruments: a microscopic imager and a Raman spectrometer. Image Credit: Ligeza et al. 2026. Frontiers in Space Technologies.
The authors stress the importance of the MICRO and Raman spectrometer combination. These instruments are aimed at both scientific research into astrobiology and the practical need to prospect for water ice and other materials on either Mars or the Moon. This reflects key goals in the wider space science community. "A key objective of this research is to assess the capability of integrating MICRO and Raman spectroscopy on a robotic arm for in situ characterization of sample morphologies and mineralogies in lunar and Martian analogue environments, particularly for applications in astrobiological investigations and in-situ resource utilization (ISRU) prospecting," the authors explain.
The Martian and Lunar analogue testing missions were conducted at the Marslabor of the University of Basel. The Marslabor facility was designed to run simulations for missions like ExoMars. "We conducted Martian analogue missions during daylight hours, adjusting illumination to reproduce representative Martian surface lighting conditions," the researchers write. "The lunar analogue mission was conducted at night to simulate the realistic lighting conditions of the lunar environment, particularly those near the lunar south pole."
The sample rocks in the tests were both morphologically and minerally the same as rocks from Mars and the Moon. One of the Mars samples is gypsum, which has been detected on Mars and is a "strong candidate" to preserve biosignatures. Another sample was carbonate rock, which has also been detected on Mars and could hold preserved biosignatures as well. The Lunar samples included dunite, which could be a source of oxides.
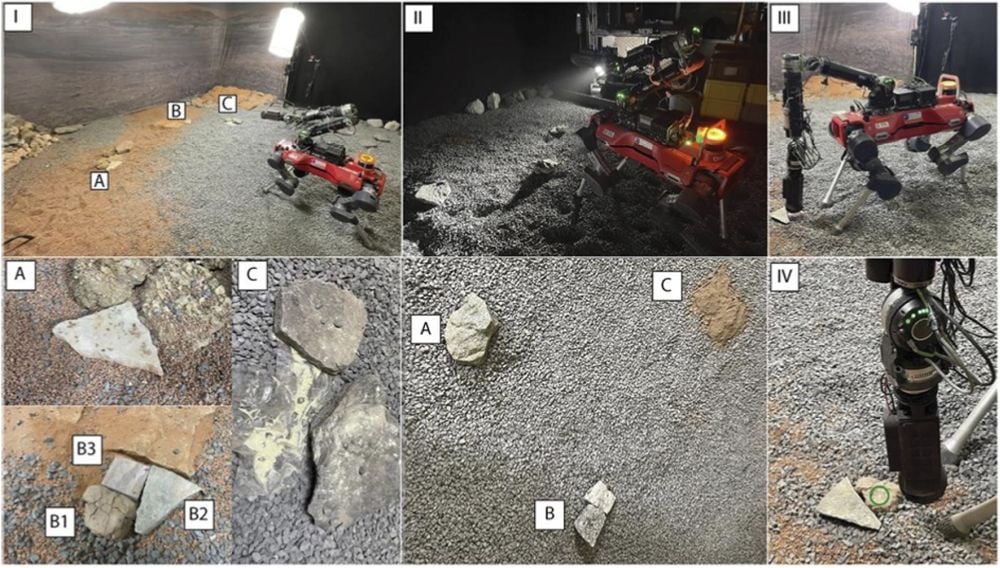 The top left image and the panels below it show the Martian analogue testing space and samples of interest placed there to test ANYmal's instruments. The top middle image and image below it show the Lunar analogue space with samples. The top right image shows the MICRO microscopic instrument being used, and the image below it shows the Raman spectrometer in action. The green circle on the sample shows the instrument's laser pointer. The samples are of different types of minerals of interest found on both bodies, along with regolith. Image Credit: Ligeza et al. 2026. Frontiers in Space Technologies.
The top left image and the panels below it show the Martian analogue testing space and samples of interest placed there to test ANYmal's instruments. The top middle image and image below it show the Lunar analogue space with samples. The top right image shows the MICRO microscopic instrument being used, and the image below it shows the Raman spectrometer in action. The green circle on the sample shows the instrument's laser pointer. The samples are of different types of minerals of interest found on both bodies, along with regolith. Image Credit: Ligeza et al. 2026. Frontiers in Space Technologies.
Lead author Ligeza wrote a guest editorial about her research for the journal where she explains the motivation behind smaller, semi-autonomous legged rovers.
"Our research question was whether a robot equipped with a simple scientific payload could quickly study several targets while still delivering meaningful scientific results," Ligeza wrote. "The results proved that even relatively compact instruments can achieve the full scientific objective: identifying rocks relevant for astrobiology and resource exploration."
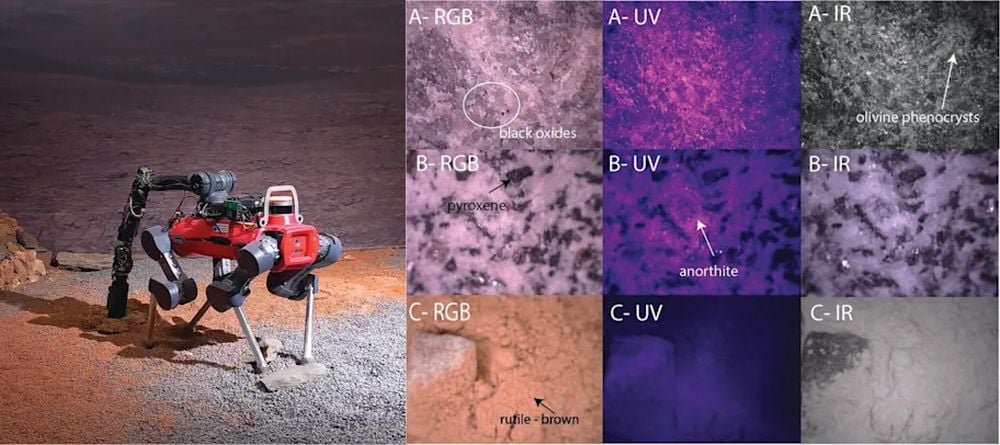 The image on the left shows ANYmal performing autonomous measurements of a rock with MICRO and Raman. The image on the right are examples of images from the microscopic imager (MICRO) returned by the robot, showing the texture of three different lunar analogue materials in RGB, UV, and IR. Image Credit: Dr Gabriela Ligeza.
The image on the left shows ANYmal performing autonomous measurements of a rock with MICRO and Raman. The image on the right are examples of images from the microscopic imager (MICRO) returned by the robot, showing the texture of three different lunar analogue materials in RGB, UV, and IR. Image Credit: Dr Gabriela Ligeza.
"Instead of waiting for humans to command every step, robots could move through the terrain, scan rocks quickly, and collect data," Ligeza explained. "This approach could allow us to conduct science much faster on planetary surfaces. Robots could rapidly explore and characterize many rocks, helping scientists pinpoint the most interesting samples for further investigation."
More autonomous robotic explorers are almost certain to take a more prominent role in planetary exploration. The ESA isn't the only agency pursuing this goal, NASA is also developing greater autonomy in robots, especially in hazard avoidance. No doubt the world's other space agencies are likewise developing these capabilities. There will most likely be a day when multiple interacting robots explore together, with minimal day-to-day input from human operators.
"As space agencies prepare for upcoming missions to the Moon, Mars, and beyond, such semi-autonomous systems could help scientists survey larger areas in less time, supporting both resource prospecting and the search for possible signs of past life," Ligeza said.
The test results showed that "multi-target sampling optimizes instrument utilization and accelerates data collection," according to the authors. "Mars missions collected data 22% faster than the Lunar mission, reinforcing the suitability of multi-target, semi-autonomous strategies for time-restricted exploration where real-time decision-making is limited, such as Mars."
"These findings emphasize the need to balance mission automation, efficiency, and scientific return based on operational constraints and planetary environments," the authors conclude.