
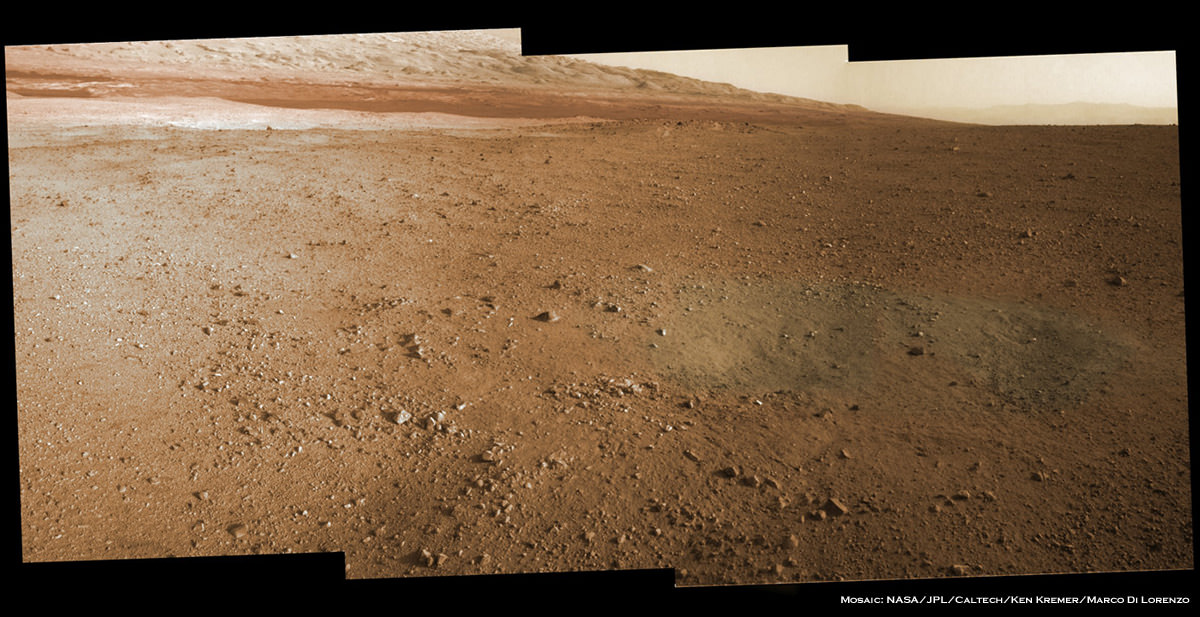
Image Caption: Mosaic of Mount Sharp inside Curiosity’s Gale Crater landing site. Gravelly rocks are strewn in the foreground, dark dune field lies beyond and then the first detailed view of the layered buttes and mesas of the sedimentary rock of Mount Sharp. Topsoil at right was excavated by the ‘sky crane’ landing thrusters. Gale Crater in the hazy distance. This mosaic was stitched from three full resolution Navcam images returned by Curiosity on Sol 2 (Aug 8) and colorized based on Mastcam images from the 34 millimeter camera. Processing by Ken Kremer and Marco Di Lorenzo. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
The Curiosity rover has beamed back the first detailed images of Mount Sharp, offering a stupendous initial view of her ultimate driving goal, and is now in the midst of a crucial “brain transplant” this weekend that will transform her into a fully operational rover.
The science team will direct the six-wheeled Curiosity to begin climbing Mount Sharp at some later date during the rovers’ two year primary mission after traversing and extensively investigating the floor of her landing site inside Gale Crater.
See our mosaic focusing on the base of Mount Sharp using three full resolution images snapped by the Navcam navigation camera located on the newly erected camera and instrument mast with colorization based on the 34 millimeter Mastcam color camera.
Curiosity came to rest almost flat on the martian surface, but with a slight 3 degree tilt down in the front and the images thus far are taken from that preprogrammed viewpoint, roughly some six miles or so from the base of Mount Sharp.
The terrain is strewn with small pebbles that may stem from a nearby alluvial fan through which liquid water flowed long ago, scientist think. Observations from orbit with NASA’s Mars Reconnaissance Orbiter have identified clay and sulfate minerals in the lower layers of Mount Sharp, indicating a wet history. At higher elevations, scientists hope to discover a boundary layer and indications of what led to the “Great Dessication Event” and loss of liquid water on the ancient Martian surface.
This weekend Curiosity has also begun transmitting spectacular hi res Mastcam images that will far exceed anything else thus far. Here is the Mastcam 360 pano as assembled by NASA so far:

Image Caption: First Hi-Res Color Mosaic of Curiosity’s Mastcam Images. NASA/JPL-Caltech/MSSS
But before the car-sized robot can actually rove around, reach out with her 7 foot (2 meter) long instrument loaded arm and scoop up samples for analysis by the on board chemistry labs she needs the software smarts to accomplish the science tasks.
With all the initial post landing objectives accomplished, engineers at NASA’s Jet Propulsion Lab in Pasadena, Calif., are spending 4 Sols, or Martian days, bracketing this weekend to upload a new software package named “R10” that is optimized for surface operations and will replace the current “R9” package.
“We designed the mission from the start to be able to upgrade the software as needed for different phases of the mission,” said Ben Cichy of NASA’s Jet Propulsion Laboratory in Pasadena, Calif., chief software engineer for the Mars Science Laboratory mission. “The flight software version Curiosity currently is using [R9] was really focused on landing the vehicle. It includes many capabilities we just don’t need any more. It gives us basic capabilities for operating the rover on the surface, but we have planned all along to switch over after landing to a version of flight software that is really optimized for surface operations.”
Software on both the primary and backup computers is being carefully upgraded in step by step stages. He said an initial “toe dip” on Friday to test the upgrade was the first step.
“R10 is optimized for surface operations and has what the science team wants. It’s being downloaded over the next four Sols to enable this fantastic mission,” Cichy said at a JPL news briefing on August 10. They will stand down on science for the next four Sols during the installation.
“Right now, we have the capability in our basic surface software to check out the health of the instruments, but we don’t really have the capability to go and make the full use of all this great hardware we shipped to Mars.”
“So the R10 software gives us the capability to use the robotic arm fully, to use the drill, to use the dust removal tool, to use the whole sampling chain and injest the samples and analyze them, all this exciting stuff this mission will do.”
“Curiosity is a Martian mega rover and born to drive ! R10 gives us the ability to drive autonomously and use images to detect hazards and drive safely.”
So far, the software upgrade is going as planned this weekend.
Curiosity made an unprecedented pinpoint landing inside Gale Crater on Aug. 5/6 using the rocket powered “Sky Crane” descent stage that lowered Curiosity by cables onto the Red Planet’s surface exactly as planned on the plains astride Mount Sharp just a few miles from the base of the gigantic mountain.
Mount Sharp covers much of the interior of the 96 mile wide (154 km) Gale Crater. The peak of the 3.4 mile (5.5 km) high layered mountain is taller than Mount Whitney in California.
For comparison, see Curiosity’s initial wider field post-landing shots of Mount Sharp in 2 D and 3 D from the lower resolution fish-eye Hazcam cameras, here
NASA’s 1 ton mega rover Curiosity is the biggest and most complex robot ever sent to the surface of another planet, sporting a payload of 10 state of the art science instruments weighing 15 times more than any prior roving vehicle. Curiosity’s goal is to determine if Mars was ever capable of supporting microbial life, past or present and to search for the signs of life in the form of organic molecules.
One Earth week tomorrow, Curiosity!
Curiosity, in the “First Hi-Res Color Mosaic of Curiosity’s Mastcam Image” (
http://mars.jpl.nasa.gov/msl/images/pia16051_figure_1_raw_smaller-br2.jpg ) what is that odd looking rock at the far right side of the image made of (directly left of 1 of the calibration marks). Any ideas how that might have formed?
Who’s got Curiosity’s remote? drive it over and lets have a look at it 🙂
A gob of poured concrete?.. 🙂 ….
Perhaps once molten..
The pock marked looking dealy? Ya, that is odd. We should ask R.C. Hoagland for his professional assessment. I bet he says it’s a whiffle-ball that was deformed by the landing rockets… “They’re not SAYING anything about it… (OF COURSE!!) But NASA landed the Rover ON a Martian elementary school playground’s REMAINS!!!
I think I also saw a miniature pyramid in the pic.. Hmmm….
NASA – No comment.
Curiosity, in the “First Hi-Res Color Mosaic of Curiosity’s Mastcam Image” ( http://mars.jpl.nasa.gov/msl/images/pia16051_figure_1_raw_smaller-br2.jpg ) what is that odd looking rock at the far right side of the image made of (directly left of 1 of the calibration marks). Any ideas how that might have formed?
What a great picture. Just think of how many houses you could build there!
That’d be a good topic for a snooty wine and cheese party.
“so me and the wife are thinking of investing in property on Mars…”
The name of the mountain is “Aeolis Mons” (source:
http://planetarynames.wr.usgs.gov/Feature/15000)
I believe that translates to, “Flowing Water Mountain”…
Link given is broken.
Try http://planetarynames.wr.usgs.gov/Feature/15000?__fsk=356920176
Curiosity sees Aeolis Mons Up Close and gets ‘Brain Transplant’ <—fixed
I don’t mean to be an ass, but you have a typo in the first sentence.
I’ve been watching every NASA TV event I can get. To do that one has to wade between children’s education programs and other ‘fluff’.. but the briefings are great. Saw Emily Lokduwalla (SP?) asking her usual intelligent questions… She’s a participant in the weekly UT hangout(s). If you haven’t dropped in to watch and listen in, you are really missing out!
It’s understandable that the mission profile includes the extensive check out(s).. but maan-o-man, it seems like it’s taking forever to finally get on the road! Oui?
Even though fundamentally we’re just staring at rock, dirt and dust, these HD pictures have to be some of the prettiest photos i’ve seen! Now if only NASA would release some pictures which would make perfect desktop wallpapers!
that looks like some really rough going at the base of the mountain there.
i bet it’s going to take a while to pick a route over those moguls.
Jet Propulsion Lab Specialist Moe Howard stated,
“We uploaded Curiosity a toupee with some BRAINS IN IT!”