ESA's Rosalind Franklin Mars rover has been delayed twice due to problems with its parachute deployment and Russia's invasion of Ukraine. After ESA formally terminated the mission's cooperation with Roscosmos in July 2022, Europe found a new partner with NASA and the mission appears to be on track for a 2028 launch.
The agency recently shared a new animated mission trailer showing new details about the rover, including how it will drill two meters into the Martian regolith and examine the samples with its onboard laboratory.
Rosalind Franklin's mission is to search for past and present signs of life on Mars. Additionally -- as has been the mission for every Mars rover -- Rosalind Franklin will the search for evidence of past water on the Red Planet. The video suggests three might be oceans to discover.
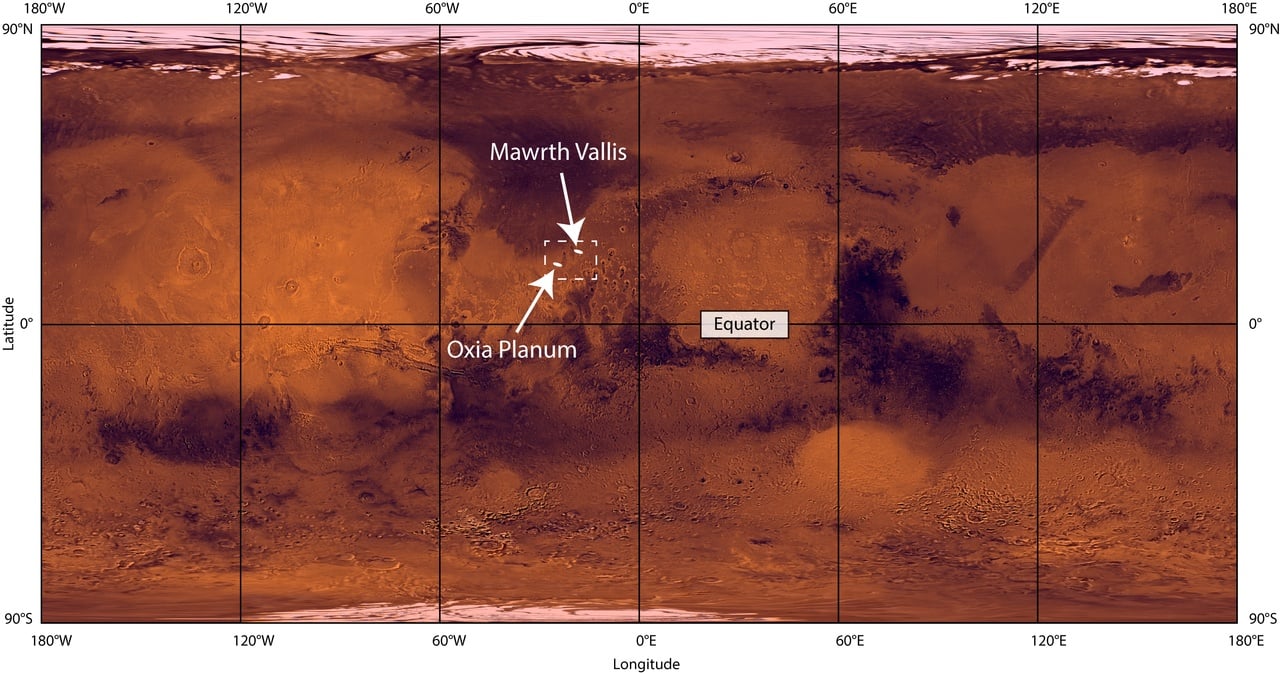
The landing site for this mission is Oxia Planum, a region located between two outflow channel systems: Mawrth Vallis to the northeast and Ares Vallis to the southwest. Scientists believe this region will contain remnants of the planet's wetter past.
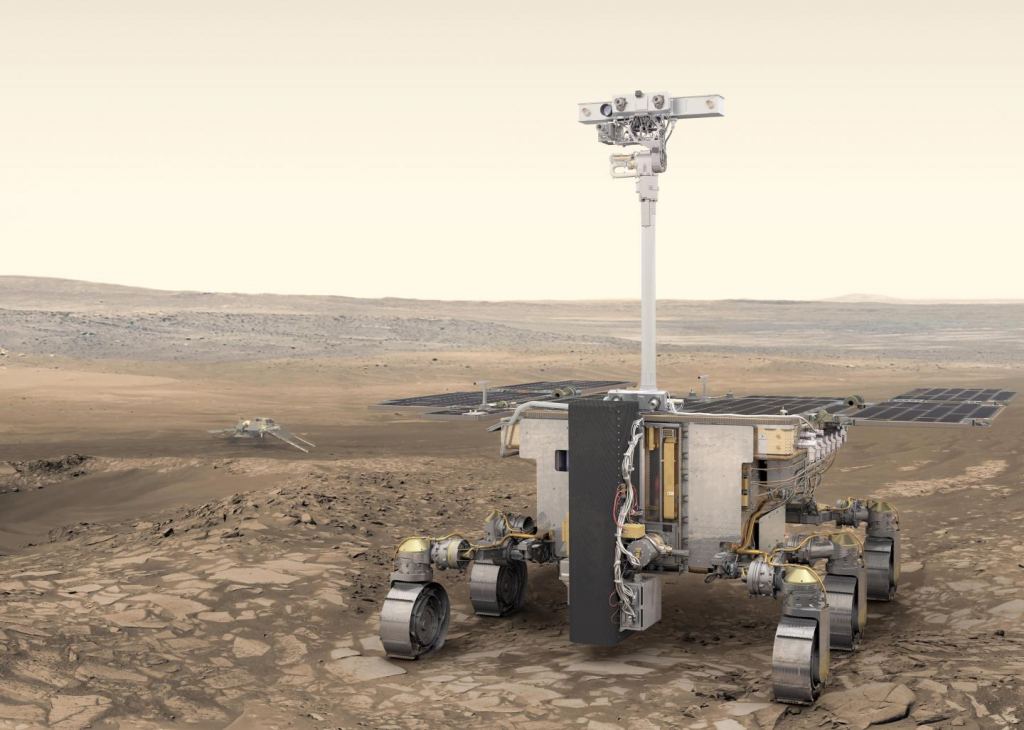
Rosalind Franklin will be equipped with cameras which can help characterize the surface environment, as well as document the use of the drill and the samples collected. Being able to drill at least two meters below the surface of the Mars regolith will allow for studying samples that have been protected from surface radiation and extreme temperatures.
The onboard laboratory will process samples and deliver them to three instruments. Minerals will be characterized by the MicrOmega instrument; a Raman spectrometer will provide data concerning mineralogical composition; and part of the Mars Organics Molecule Analyser (MOMA) will study and identify soil chemistry. and characterize the surface environment. The rover is expected to drive up to 70 meters per Martian day, or Sol.
Also with this mission, ESA is looking to demonstrate key technologies that are needed for future planetary exploration missions. This includes the capability to land safely on a planet, to move autonomously on the surface, and to perform drilling and sample processing and analysis automatically.
The rover has the ability to use some novel driving techniques, such as wheel-walking to overcome difficult terrains, as well as autonomous navigation software.
The mission is currently set to launch between October 5th and the 25th in 2028, with a projected landing on October 28, 2030.
