Asteroids come in many shapes and sizes. Most are spherical, though many have a feature that can make them difficult to land on - they are essentially just collections of rocks loosely bound together by gravity. In space exploration jargon, they are known as "rubble piles." Many of the asteroids humanity has visited are considered rubble piles, including Itokawa and Dimorphos, the destinations for Hayabusa and DART, respectively. But, as the trials of the Philae spacecraft showed when it tried to meet up with the comet 67P/Churyumov-Gerasimenko, landing on these objects with very low surface gravity can be difficult. Enter a new concept from researchers at the University of Colorado, Boulder. Their idea, known as Area-of-Effect Softbots (AoES), could help future asteroid explorers, and even miners, overcome some of the challenges facing them at these small bodies.
PI Jay McMahon and his team performed the work initially supported by a NASA Institute for Advanced Concepts (NIAC) Phase I grant back in 2017. Their idea was simple - design a robot that could stick to an object with really low gravity while also introducing a machine that could dig into the asteroid for valuable materials, whether water ice or precious metals.
That sounds a lot easier than it is, though. Asteroids have notoriously low gravity, so spacecraft have had to resort to anchoring systems, which only work sometimes (again, see Philae's bouncing expedition). Even more importantly, once the spacecraft is anchored down somewhere, it isn't easy to launch back off again or to maneuver to another part of the same asteroid.
An Astronomy Cast episode profiles the Solar System's survivors.That is where the idea of softbots comes in. Plenty of prototypes of robots with deformable bodies are under development here on Earth. They are typically useful in search and rescue or dangerous environments like nuclear reactors. But using them in space, especially when interacting with asteroids, is a novel idea.
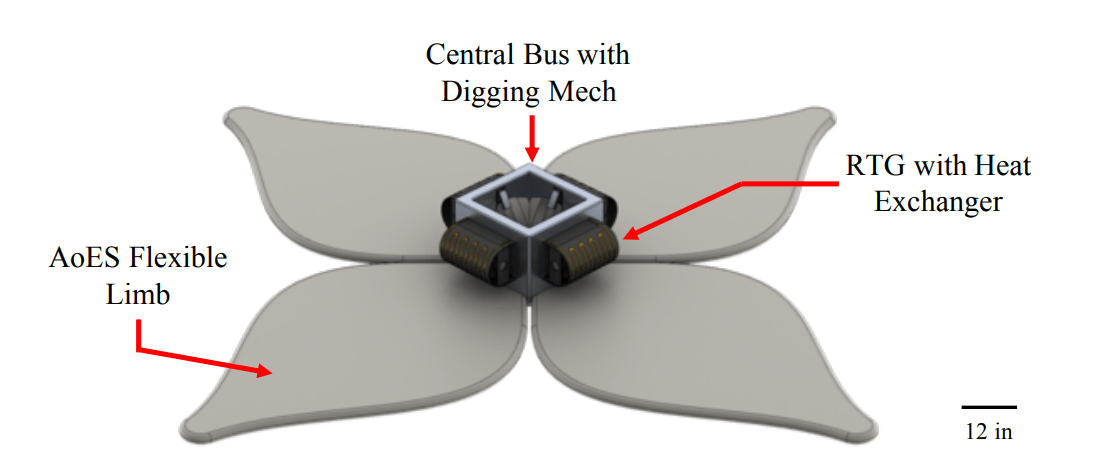
Softbots have four main advantages over other types of spacecraft when interacting with an asteroid. They can adhere to the surface better than most. Once on the surface, they can crawl along it. They can also launch themselves back off the surface by "jumping." And finally, they can redirect themselves to a different location on the asteroid using a simple solar sail.
First, let's tackle adhesion - soft robots can have a large surface area, and that surface area can be made up of almost any flexible material. How that material adheres to the asteroid's surface is an important consideration for the AoES. Typically, an asteroid has small enough surface gravity that another force is the main force holding the rubble pile together. Known as the van der Waals force, it exerts a force at each point of contact between the boulders. Adhesion uses a similar method, allowing the "soft" part of the robot to adhere to the asteroid's surface.
Fraser chimes in to the ongoing debate - should we send robots or humans to explore?While an AoES might use its own van der Waals force to stick to the asteroid, it will also implement a force known as "electroadhesion" that uses electrodes in the flexible part of the robot to induce a charge in them, which then also induces an opposite charge in the surface. This allows the robot arm to "adhere" to the surface by using the bonding force of the opposing electrical charges, thereby more strongly securing the robot to the asteroid's surface.
But what if it doesn't want to stay stuck to the asteroid's surface? One option is to crawl along that surface, and AoES can do that. The design discussed in Dr. McMahon's final report for NIAC uses a type of actuator known as a HASEL actuator. These allow the robot to adhere one part of its appendage (say the tip) to the asteroid while contracting another part (say the middle), effectively allowing it to crawl along the surface of the asteroid while maintaining consistent surface contact.
If that mode of transport isn't enough, the AoES could literally jump to its next location. In a method similar to "crawling," selectively controlling which part of the limb is to forcing electroadhesion while another part is contracting, but in this case, the contraction is quickly released at the same time the electroadhesion is stopped, effectively allowing the AoES to push off the asteroid and back into the space around it. If done correctly, it could even enable the AoES to maneuver to its next target on the asteroid using only the forces it put into its own jump.
Interesting Engineering takes a look at some of the soft robots we use on Earth.But if that doesn't work, the AoES has another advantage - it can turn into a solar sail. An AoES robot can effectively use light to push itself in a given direction by fully extending its appendages. So if an operator (or the robot's AI) wants to maneuver to a different location farther away than a jump could take it, it maneuvers itself simply using the Sun's light to get there. These techniques are a dramatic departure from the methodologies of existing small-body landers, representing a leap forward in operations on asteroids.
So what would an AoES do when it gets there? In the concept discussed in the NIAC paper, its primary goal is to feed material into a central collection system, where it is either ground up or vaporized and can then be transported back to a larger processing ship in orbit around the asteroid. In fact, several AoES systems could be active on an asteroid at any given time, and they could all be feeding material back to their mothership.
Those capabilities, and its flexibility of having more than one system on any given asteroid at a time, make the AoES system particularly appealing as a solution for mining rubble pile asteroids. However, it does not appear that the AoES was selected for a second round of NIAC funding back in 2018, though research from Dr. McMahon and his team has been steady since then, including papers on how to use AoES in low earth orbit or to deflect a potentially dangerous asteroid. Maybe the idea was just a bit early for its time, and we might very well see dozens or hundreds of flexible-body robots swarming over a potentially profitable asteroid in the not-too-distant future.
Learn More:
Jay McMahon - Dismantling Rubble Pile Asteroids with AoES (Area-of-Effect Soft-bots)
McMahon et al. - Soft-Robotic, Propellant-Free Servicers for LEO Spacecraft
UT - Don’t Bother Trying to Destroy Rubble Pile Asteroids
UT - Rubble Pile Asteroids Might be the Best Places to Build Space Habitats
Lead Image:
A model of a potential configuration of an AoES spacecraft.
Credit - Jay McMahon
