
Lunar exploration has been gaining more and more traction from various sources recently. Every step forward is another towards potentially having a permanent human presence on another solar system body. ESA took another step recently with the completion of its Analog-1 robotics test, which took place successfully on the slopes of Mt Etna earlier this month.
Analog-1 has been a long-standing ESA effort to model what it would be like for a human operator to control a robot directly on the lunar surface while floating above it in the Gateway space station. Planned for launch no earlier than 2024 as part of the Artemis program, Gateway will serve as a home base for many lunar exploration activities.
UT video on lunar rovers past and present.Controlling a robot from that far away isn't easy and something that both the robot designers and its operators must get used to. Hence, the development of the Analog-1 project. ESA began its effort to develop a robotic interface system over ten years ago and has slowly been improving its capabilities during that time. The recent test marks a culmination of that effort, and the space agency is rightfully proud of its success.
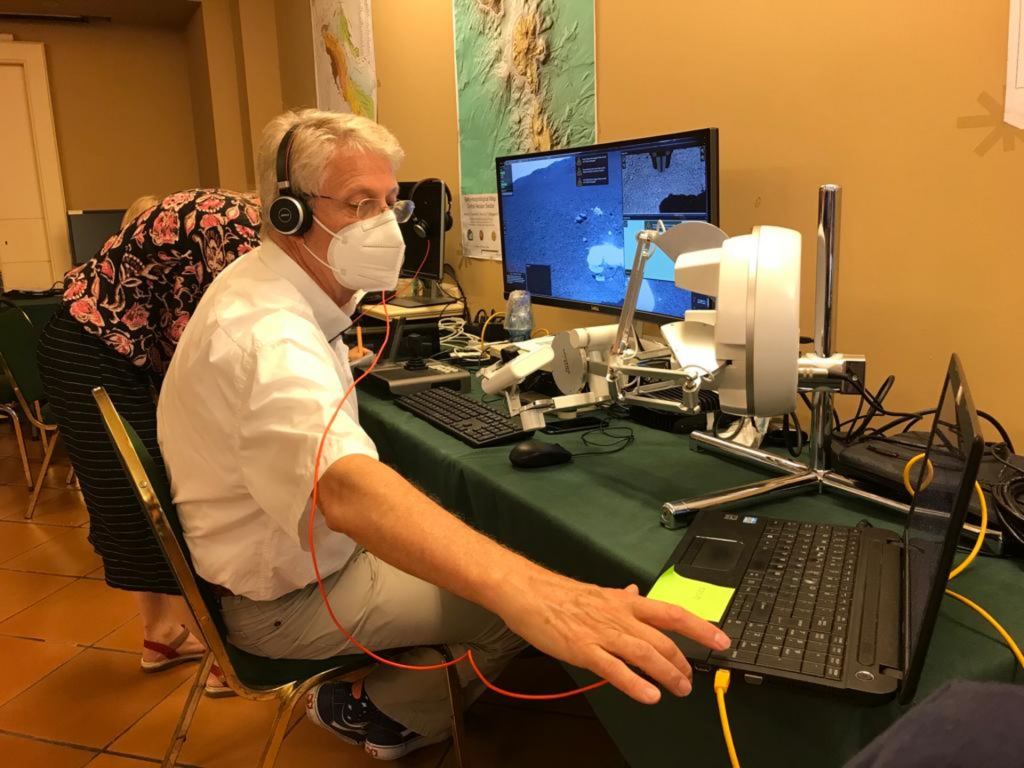
There were several novel aspects of this new test. One of the most obvious is that the operator and mission control personnel were physically about 23 kilometers away from the robot while guiding it. They were put up in separate hotel rooms meant to mimic the actual environments they would be situated in during a real mission. In addition, the system's programmers introduced a one-second delay to simulate the delay operators on the Gateway would have while driving a rover on the surface.
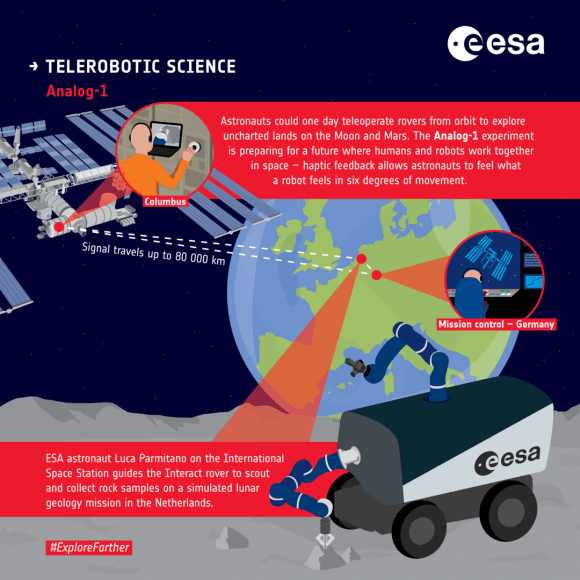
In addition, the robot designers implemented a haptic feedback system that allowed Thomas Reiter, one of ESA's astronauts, to "feel" what the robot was feeling with its actuator arm. But the "Interact" rover, which had the actuator arm and was used to collect samples, was only one of a team of robots, including a drone, a "centipede-like" Scout crawler, and two other Lightweight Rover Units (LRUs), which look like miniaturized versions of the NASA rovers currently exploring Mars, and were designed by DLR - Germany's space agency.
Additional support was provided by a lander, which served as a communications hub for the fleet of robots being tested. It was a good thing that such a wide variety of robots was available - navigating Mt Etna's lunar-analog landscape proved tricky for Interact's standard four-wheel configuration, but other locomotion techniques, such as the Scout's crawling motion. That difficulty led to a change in approach by the robot's programmers. They introduced a type of "assisted driving" feature for the robot's operators that allowed the driver to simply select where he wanted to go, and then the robot itself would find its way there using its own judgment.
Features like that will be absolutely critical on future lunar missions, especially as driver fatigue could significantly affect how long a rover can remain operational. There are sure to be plenty more problems that will have to be overcome if the overall Artemis project is to succeed, not to mention getting the crew capsule off the ground at some point. But for now, this part of the robotic exploration of the moon has taken a giant leap forward.
Learn More:
ESA - Rover plus astronaut complete Mount Etna challenge
UT - ESA Astronaut Luca Parmitano will be Controlling a Rover From Space
UT - Astronaut Scott Tingle Was Able To Control A Ground-Based Robot… From Space.
UT - Operating a Rover in Real-time From a Distance
Lead Image:
Image of the Interact rover on the slopes of Mt Etna.
Credit - ESA