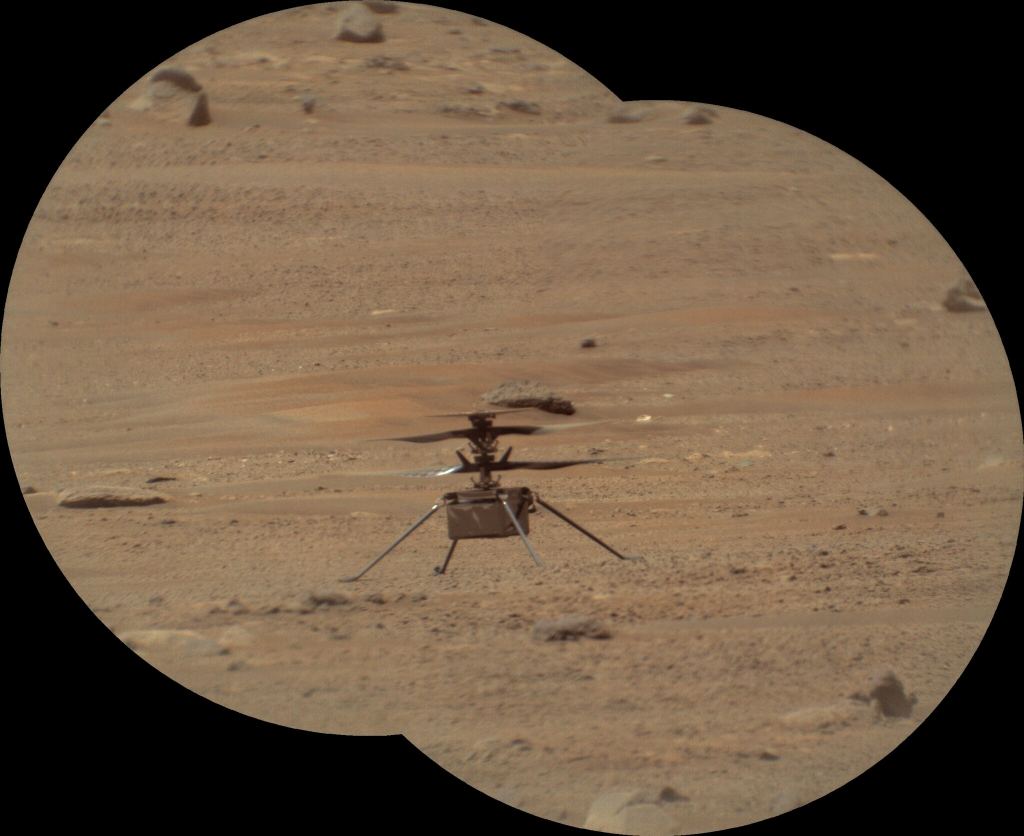
When NASA's Perseverance rover landed in the Jezero crater on February 18th, 2021, it brought with it an interesting little companion that's been causing quite a stir of late! We are talking, of course, about the Ingenuity Mars Helicopter, an experimental flight system designed to demonstrate if aerial systems can work on Mars. Since its inaugural flight on April 19th, the helicopter has been pushing the boundaries of flight on Mars, going farther and faster each time.
In fact, the helicopter managed to establish multiple records in the course of its first five flights, reaching a maximum distance of 266 m (873 ft) in 117 seconds. Unfortunately, things did not go so well for Ingenuity during its sixth and latest flight. Due to a navigation timing error, the helicopter strayed from its flight path, but managed to land safely just a few meters from where it was supposed to.
This is the first time that Ingenuity has suffered a malfunction since it first took to the Martian skies over six weeks ago. Luckily, the fail-safe systems prevented any accidents, and mission controllers were able to determine the source of the problem. The trouble began near the end of the first leg of the helicopter's sixth test flight, which took place on Saturday, May 22nd, or the 91st day of the Perseverance mission (Sol 91).
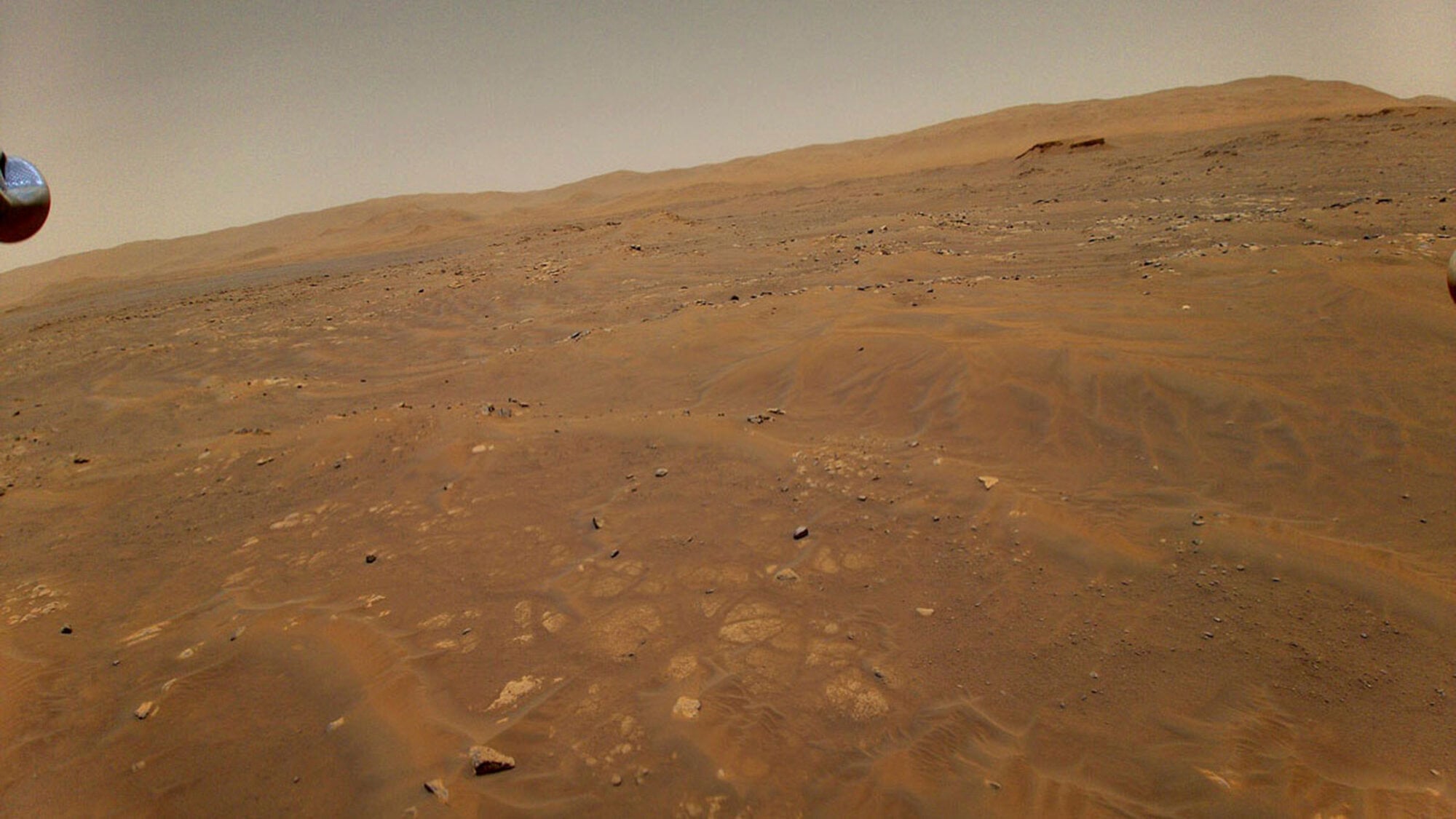
According to chief pilot Håvard Grip, who recently wrote about the error on the mission's Status Update page, this flight was meant to push the flight envelope even farther and demonstrate the helicopter's aerial imaging capabilities This would consist of the helicopter climbing to an altitude of 10 m (33 ft) before flying horizontally for 150 m (492 ft) to the southwest at a speed of 4 m/s (14.4 km/h; 9 mph).
Once there, it was to move another 15 m (49 ft) to the south while taking images towards the west, then fly another 50 m (164 ft) northeast before landing - for a total round trip of 215 m (705 ft).
"Telemetry from Flight Six shows that the first 150-meter leg of the flight went off without a hitch. But toward the end of that leg, something happened: Ingenuity began adjusting its velocity and tilting back and forth in an oscillating pattern. This behavior persisted throughout the rest of the flight. Prior to landing safely, onboard sensors indicated the rotorcraft encountered roll and pitch excursions of more than 20 degrees, large control inputs, and spikes in power consumption."
The issue appears to have been the result of a "glitch" in the image pipeline being sent from the navigation camera to the navigation system, throwing the timing sequence off and confusing the craft about its location. The navigation camera is one of two used by Ingenuity and is responsible for tracking surface features that are used by the helicopter's flight computer to keep the helicopter within its predesignated flight path.
As Ingenuity covers greater distances, more images are needed to keep track of its flight path and ensure it doesn't veer off course. According to chief pilot Havard Grip, this "glitch" in the pipeline of images being sent by the navigation camera occurred approximately 54 seconds into the flight:
"This glitch caused a single image to be lost, but more importantly, it resulted in all later navigation images being delivered with inaccurate timestamps. From this point on, each time the navigation algorithm performed a correction based on a navigation image, it was operating on the basis of incorrect information about when the image was taken. The resulting inconsistencies significantly degraded the information used to fly the helicopter, leading to estimates being constantly “corrected” to account for phantom errors. Large oscillations ensued."
Fortunately, the engineers at NASA Jet Propulsion Laboratory who built Ingenuity were sure to include a large "stability margin" in the design of the helicopter's flight control system (thus allowing it to tolerate significant errors without becoming unstable). This kicked in during the flight and allowed Grip and the mission team to safely bring the helicopter down just 5 meters (16 feet) away from its intended landing site.
In addition, the mission team has a process where they stop using the navigation camera images during the final phase of the descent and landing. This ensures smooth and continuous estimates of the helicopter's motion during this particularly critical phase of flight testing. That practice paid off here since it ensured that Ingenuity was ignoring images subject to timing errors towards the end of its sixth flight and was able to stop oscillating and level out before touching down.

While the flight was subject to failure, Grip emphasized that it demonstrated the effectiveness of Ingenuity's sophistication and subsystems that came into play. These included the helicopter's rotor system, actuators, and power system, which responded to the increased power demands caused by the glitch and kept the helicopter flying. It was these very fail-safes that allowed for a margin of success in what otherwise could have been a disaster.
"In a very real sense, Ingenuity muscled through the situation, and while the flight uncovered a timing vulnerability that will now have to be addressed, it also confirmed the robustness of the system in multiple ways," said Grip. "While we did not intentionally plan such a stressful flight, NASA now has flight data probing the outer reaches of the helicopter's performance envelope. That data will be carefully analyzed in the time ahead, expanding our reservoir of knowledge about flying helicopters on Mars."
Two months after the Perseverance rover landed on Mars, Ingenuity became the first aircraft to make a powered flight on another planet. Originally, the technology demonstrator was only meant to perform five test flights over the course of 30 mission days (sols). Its success thus far has impressed NASA to the point that they have decided to extend its mission by at least a month.
The data it gathers will inform future missions to Mars and other non-airless bodies (like Titan), where aerial vehicles will be able to conduct science and provide a unique perspective on extraterrestrial environments. In short, this "little helicopter that could" was nothing if not appropriately named!
Further Reading: Phys.org, NASA
