The search for life has led astronomers to the icy moons in our Solar System. Among those moons,
Europa
has attracted a lot of attention. Europa is Jupiter's fourth-largest moon—and the sixth-largest in the Solar System—at 3,100 kilometres (1,900 mi) in diameter. Scientists think that its oceans could contain two or three times as much water as Earth's oceans. The only problem is, that water is hidden under a sheet of planet-wide ice that could be between 2km and 30km (1.2 miles and 18.6 miles) thick.
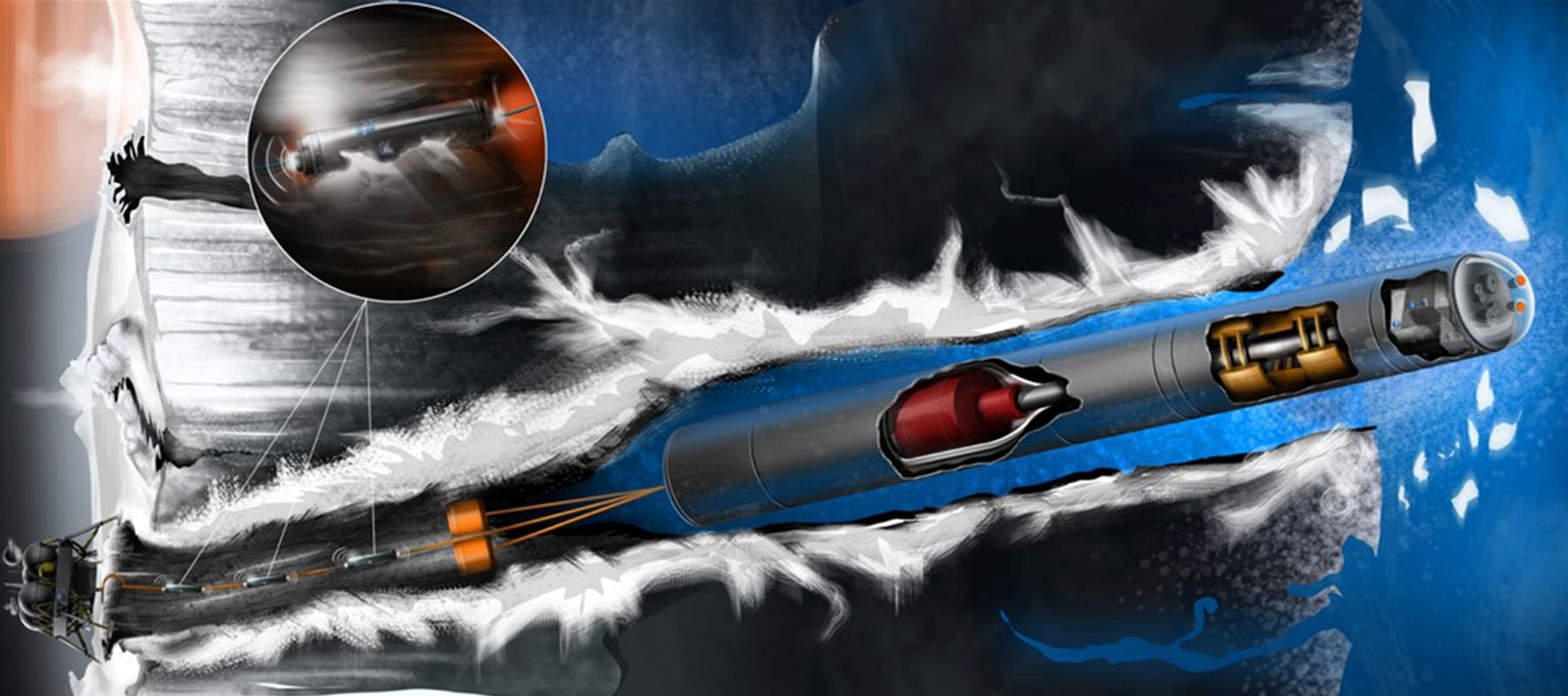
A team of scientists is working hard on the problem. Andrew Dombard, associate professor of Earth and Environmental Sciences at the University of Illinois at Chicago, is part of a team that presented a possible solution. At the American Geophysical Union meeting in Washington, D.C., they presented their idea: a nuclear-powered tunneling robot that could tunnel its way through the ice and into the ocean.
"Estimates of the thickness of the ice shell range between 2 and 30 kilometers (1.2 and 18.6 miles), and is a major barrier any lander will have to overcome in order to access areas we think have a chance of holding biosignatures representative of life on Europa," said Dombard in a
press release
.
[caption id="attachment_130968" align="alignnone" width="525"]
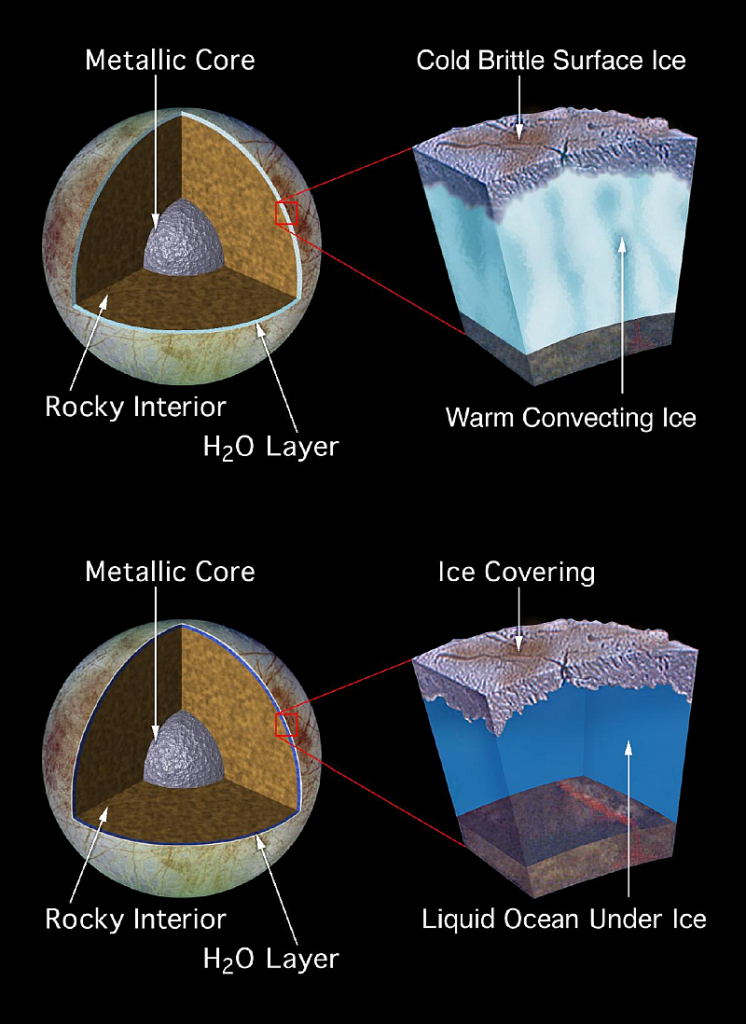
Two models of the interior of Europa. A tunneling robot would be able to tunnel through the ice and search for life. Image: NASA/JPL.[/caption]
Dombard and his colleagues presented a concept study to advance the idea of a nuclear-powered tunnelling robot and to anticipate some of the challenges that would have to be overcome. Their study is part of NASA's Glenn Research
COMPASS
team efforts. The COMPASS is a multidisciplinary team of scientists working on solutions in space exploration, particularly integrated vehicle systems.
"We didn't worry about how our tunnelbot would make it to Europa or get deployed into the ice," Dombard said. "We just assumed it could get there and we focused on how it would work during descent to the ocean."
The tunneling robot in their study would penetrate the ice shell and reach the top of Europa's ocean. Its payload would contain devices and instruments used to search for signs of life or extinct life. The bot would also evaluate the habitability of the ice shelf itself.
The robot would sample the ice at different levels. It would also sample water at the water-ice boundary, and would search the bottom of the ice to look for
biofilms
. A biofilm is a mixture or community of microorganisms that adhere to a surface, and each other.
[caption id="attachment_101273" align="alignnone" width="525"]
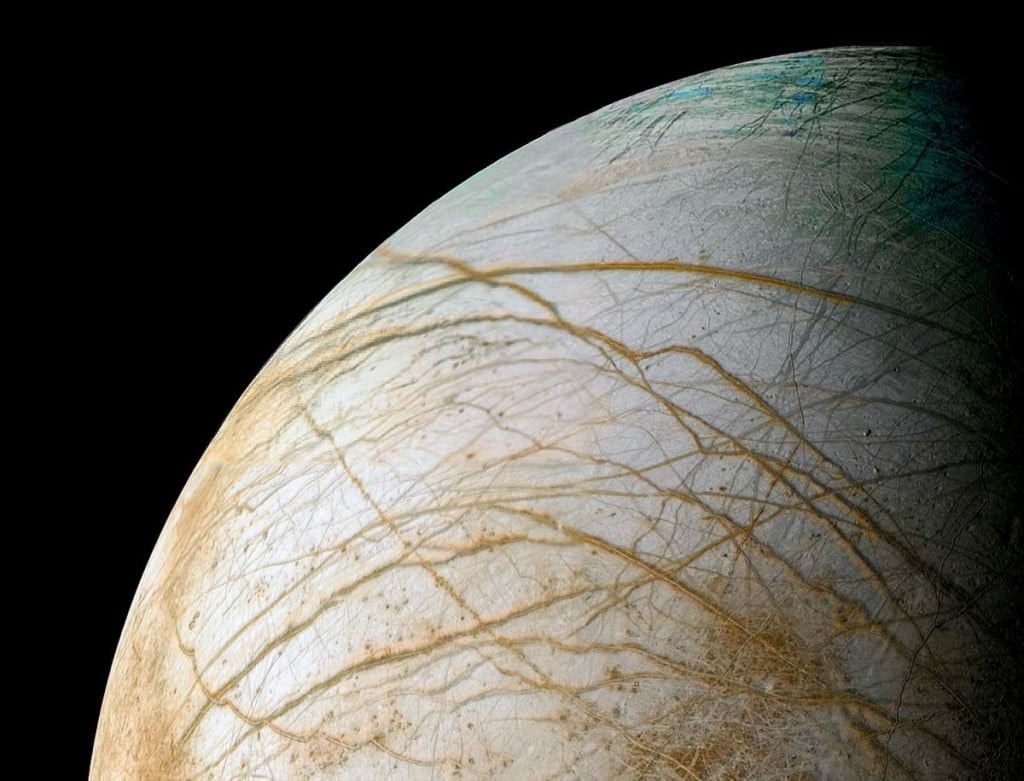
Reprocessed Galileo image of Europa's frozen surface by Ted Stryk (NASA/JPL/Ted Stryk)[/caption]
The ice layer on Europa may also contain "lakes" of liquid water within the ice shelf itself, and the tunneling robot would have the ability to sample those as well. But according to the researchers, it's either one or the other. In an email exchange with Universe Today, Andrew Dombard told us that the design challenges are too great for a tunneling robot to sample both lakes and the ocean.
"So we made the design choice to end the mission with the probe partially sticking out of the ice looking at the interface of the ice and any underlying water, whether that is a perched lake or the ocean." - Andrew Dombard, associate professor of Earth and Environmental Sciences, University of Illinois at Chicago.
"The probe is not designed to re-enter the bottom of a lake; it would just lie down on its side and not go anywhere without a lot of complicated (and expensive!) engineering," said Dombard. "So we made the design choice to end the mission with the probe partially sticking out of the ice looking at the interface of the ice and any underlying water, whether that is a perched lake or the ocean. Both regions represent a mixing zone of high scientific interest."
[caption id="attachment_130365" align="alignnone" width="640"]

Images from NASA's Galileo spacecraft show the intricate detail of Europa's icy surface. A tunnelling robot would be just the vehicle to explore the oceans under the ice. Image: NASA/JPL-Caltech/ SETI Institute[/caption]
A robotic explorer needs a lot of heat to melt its way through 2km of ice, assuming any mission could be sent to a spot where the ice was that thin. 2km is a conservative estimate, and depending on deployment, science objectives, and delivery to the surface of Europa, the tunneling robot may have to melt its way through much more ice than that: up to 30 km. The researchers considered a nuclear powered tunneling robot, but they also considered another design using
General Purpose Heat Source
(GPHS) bricks — radioactive heat source modules designed for space missions. They're fuelled with
plutonium-238 dioxide
, a radioactive isotope of plutonium that releases heat as it decays. Other spacecraft, like Cassini and New Horizons have used plutonium 238 systems, as has the MSL Curiosity rover.
A nuclear-powered probe presents clear design challenges as well. Radiation from the system—especially if a reactor is used, rather than plutonium-based GPHS system—can damage samples and the robot itself, so shielding is an important part of the design. "Being a nuclear powered craft, the radiation (particularly in the reactor design) can be damaging to the electronics, scientific instruments, and the samples themselves. That is why we put so much thought into shielding," Dombard said.
Once the robot melts its way through the ice and takes samples and measurements, it needs to relay that information back to Earth. In their
abstract
from the AFU Fall Meeting, the concept designers note that there is a "large variation in radio attenuation expected throughout the ice column." To overcome that challenge, they propose three radio signal repeaters placed at intervals of 5km, 10km, and 15km in the ice. They would also be connected to the tunnelbot by fiber optic cable. If a segment of fiber optic cable was broken, the repeaters would be the failsafe.
Another design challenge is the risk of falling through the ice when approaching the ocean itself. To prevent this, the concept designers propose a cable-float system to suspend the robot at the ice-water interface for its final sampling.
Whatever final form the tunneling robot takes, NASA seems poised to send some sort of mission to Europa in the next decade. That's a tight timeline for a robot like this, but it's clearly what is needed to unlock Europa's secrets. In the meantime, there's a proposal for a plan to listen to the ice on Europa with a surface
lander equipped with a seismometer.
It could listen for tides and water movement, and gather clues on the ocean's depth. It might also determine the presence of subsurface lakes, pockets of water trapped by ice. That's important information, but it wouldn't provide evidence of life. A seismic lander might, however, provide data crucial to selecting a landing site for a tunneling robot.
Whenever a tunneling robot like this one, or some other design, is finally sent to Europa, its landing site will likely be so-called "chaos terrain."
[caption id="attachment_68564" align="alignnone" width="849"]

Image of Europa's ice shell, taken by the Galileo spacecraft, of fractured "chaos terrain." A tunneling robot would likely be sent to this type of surface area. Image Credit: NASA/JPL-Caltech[/caption]
Scientists consider chaos terrain the best spot to search for evidence of life. Chaos terrain is a jumble of cracks, ridges, and flat areas where scientists think the subsurface ocean is interacting with the ice crust.
One study
presented evidence that chaos terrain sits atop lakes of subsurface water, rather than the ocean itself. Either way, the interface between ice and water is a prime target for exploration.
NASA has an enviable track record of successful robotic missions, especially to Mars. If any organization can send a nuclear-powered tunneling robot to Europa, they can, even though this concept is unproven. Nothing like it has ever been done.
But if we really want to find evidence of life on Europa, the path likely leads us straight through the ice.
Sources:
- UIC Press Release: A nuclear-powered ‘tunnelbot’ to search for life on Jupiter’s icy moon Europa
- AGU Fall Meeting 2018 abstract: P52C-05: Gone Fishing: A Concept Study of a Tunneling Probe Mission to Europa
- Wikipedia Entry: Europa
- NASA COMPASS site
- Wikipedia Entry: Radioisotope thermoelectric generator
- Universe Today: Europa Lander Could Carry a Microphone and “Listen” to the Ice to Find Out What’s Underneath
- Research paper: Active formation of `chaos terrain' over shallow subsurface water on Europa