Swarm of laser-sail spacecraft leaving the solar system. Credit: Adrian Mann
Humans have dreamed about traveling to other star systems and setting foot on alien worlds for generations. To put it mildly, interstellar exploration is a very daunting task. As we explored in a previous post, it would take between 1000 and 81,000 years for a spacecraft to reach Alpha Centauri (of which Proxima Centauri is considered a companion) using conventional propulsion (or those that are feasible using current technology). On top of that, there are numerous risks when traveling through the interstellar medium (ISM), not all of which are well-understood.
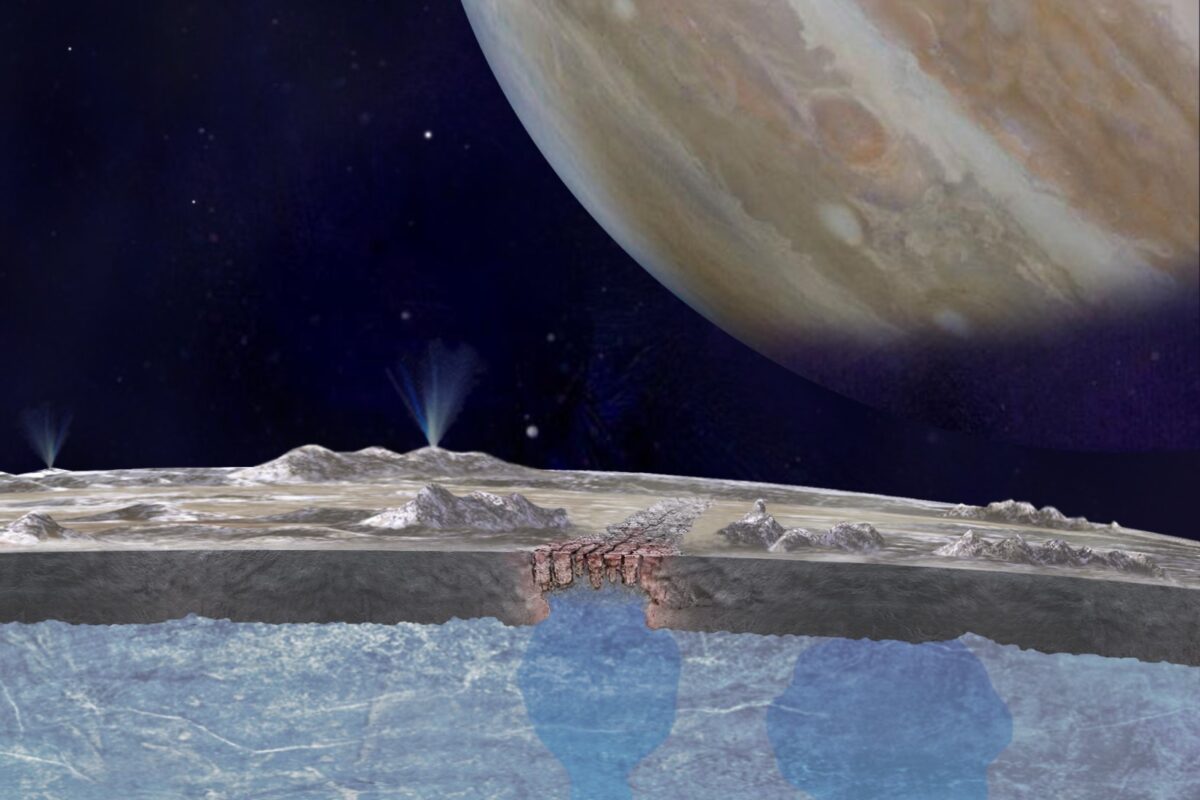
An artist’s interpretation of liquid water on the surface of the Europa pooling beneath chaos terrain. Credit: : NASA/JPL-Caltech
When Galileo pointed his telescope at Jupiter 400 years ago, he saw three blobs of light around the giant planet, which he at first thought were fixed stars. He kept looking, and eventually, he spotted a fourth blob and noticed the blobs were moving. Galileo’s discovery of objects orbiting something other than Earth—which we call the Galilean moons in his honour—struck a blow to the Ptolemaic (geocentric) worldview of the time.
Galileo couldn’t have foreseen the age of space exploration that we’re living in now. Fast forward 400 years, and here we are. We know the Earth doesn’t occupy any central point. We’ve discovered thousands of other planets, and many of them will have their own moons. Galileo would be amazed at this.
What would he think about robotic missions to explore one of the blobs of light he spotted?
In the future, telescopes may consist of distributed arrays rather than single instruments - like NASA's Terrestrial Planet Finder (TPF), a system of space telescopes for detecting extrasolar terrestrial planets. Credit: NASA
These missions will look farther into the cosmos than ever before and help astronomers address questions like how the Universe evolved and if there is life in other star systems. Unfortunately, all these missions have two things in common: in addition to being very large and complex, they are also very expensive. Hence why some scientists are proposing that we rely on more cost-effective ideas like swarm telescopes.
Two such scientists are Jayce Dowell and Gregory B. Taylor, a research assistant professor and professor (respectively) with the Department of Physics and Astronomy at the University of New Mexico. Together, the pair outlined their idea in a study titled “The Swarm Telescope Concept“, which recently appeared online and was accepted for publication by the Journal of Astronomical Instrumentation.
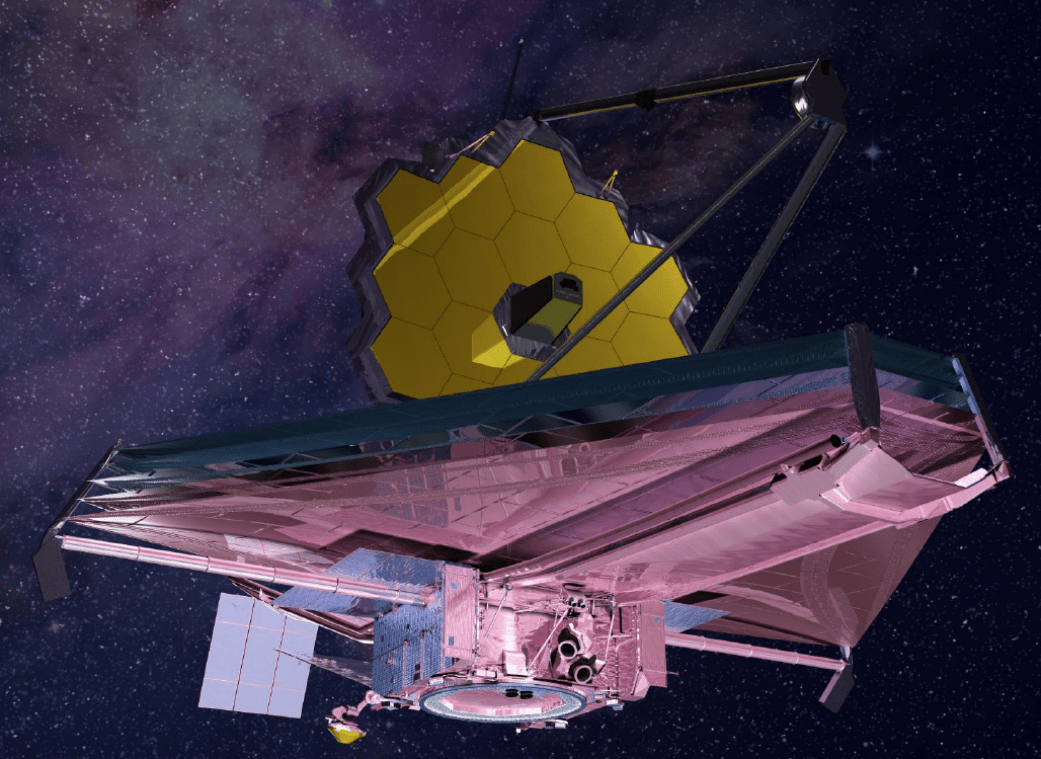
Illustration of NASA’s James Webb Space Telescope. Credits: NASA
As they state in their study, traditional astronomy has focused on the construction, maintenance and operation of single telescopes. The one exception to this is radio astronomy, where facilities have been spread over an extensive geographic area in order to obtain high angular resolution. Examples of this include the Very Long Baseline Array (VLBA), and the proposed Square Kilometer Array (SKA).
In addition, there’s also the problem of how telescopes are becoming increasingly reliant on computing and digital signal processing. As they explain in their study, telescopes commonly carry out multiple simultaneous observation campaigns, which increases the operational complexity of the facility due to conflicting configuration requirements and scheduling considerations.
A possible solution, according to Dowell and Taylor, is to rethink telescopes. Instead of a single instrument, the telescope would consist of a distributed array where many autonomous elements come together through a data transport system to function as a single facility. This approach, they claim, would be especially useful when it comes to the Next Generation Very Large Array (NGVLA) – a future interferometer that will build on the legacy of the Karl G. ansky Very Large Array and Atacama Large Millimeter/submillimeter Array (ALMA). As they state in their study:
“At the core of the swarm telescope is a shift away from thinking about an observatory as a monolithic entity. Rather, an observatory is viewed as many independent parts that work together to accomplish scientific observations. This shift requires moving part of the decision making about the facility away from the human schedulers and operators and transitioning it to “software defined operators” that run on each part of the facility. These software agents then communicate with each other and build dynamic arrays to accomplish the goals of multiple observers, while also adjusting for varying observing conditions and array element states across the facility.”
This idea for a distributed telescope is inspired by the concept of swarm intelligence, where large swarms of robots are programmed to interact with each other and their environment to perform complex tasks. As they explain, the facility comes down to three major components: autonomous element control, a method of inter-element communication, and data transport management.
Of these components, the most critical is the autonomous element control which governs the actions of each element of the facility. While similar to traditional monitoring and control systems used to control individual robotic telescopes, this system would be different in that it would be responsible for far more. Overall, the element control would be responsible for ensuring the safety of the telescope and maximizing the utilization of the element.
“The first, safety of the element, requires multiple monitoring points and preventative actions in order to identify and prevent problems,” they explain. “The second direction requires methods of relating the goals of an observation to the performance of an element in order to maximize the quantity and quality of the observations, and automated methods of recovering from problems when they occur.”
The second component, inter-element communication, is what allows the individual elements to come together to form the interferometer. This can take the form of a leaderless system (where there is no single point of control), or an organizer system, where all of the communication between the elements and with the observation queue is done through a single point of control (i.e. the organizer).
Long Wavelength Array, operated by the University of New Mexico. Credit: phys.unm.edu
Lastly, their is the issue of data transport management, which can take one of two forms based on existing telescopes. These include fully 0ff-line systems, where correlation is done post-observation – used by the Very Long Baseline Array (VLBA) – to fully-connected systems, where correlation is done in real-time (as with the VLA). For the sake of their array, the team emphasized how connectivity and correlation are a must.
After considering all these components and how they are used by existing arrays, Dowell and Taylor conclude that the swarm concept is a natural extension of the advances being made in robotic and thinking telescopes, as well as interferometry. The advantages of this are spelled out in their conclusions:
“It allows for more efficient operations of facilities by moving much of the daily operational work done by humans to autonomous control systems. This, in turn, frees up personnel to focus on the scientific output of the telescope. The swarm concept can also combine the unused resources of the different elements together to form an ad hoc array.”
In addition, swarm telescopes will offer new opportunities and funding since they will consist of small elements that can be owned and operated by different entities. In this way, different organizations would be able to conduct science with their own elements while also being able to benefit from large-scale interferometric observations.
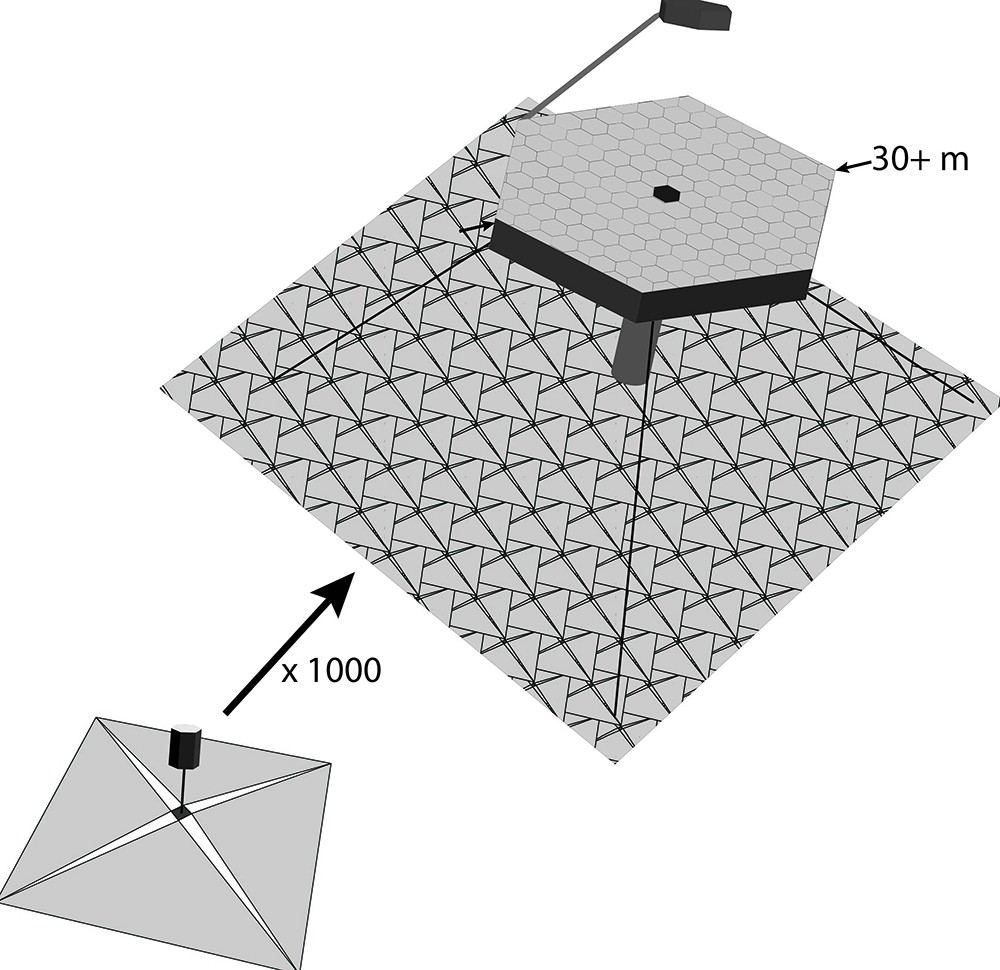
Graphic depiction of Modular Active Self-Assembling Space Telescope Swarms Credit: D. Savransky
This concept is similar to the Modular Active Self-Assembling Space Telescope Swarms, which calls for a swarm of robots that would assemble in space to form a 30 meter (~100 ft) telescope. The concept was proposed by a team of American astronomers led by Dmitri Savransky, an assistant professor of mechanical and aerospace engineering at Cornell University.
This proposals was part of the 2020 Decadal Survey for Astrophysics and was recently selected for Phase I development as part of the 2018 NASA Innovative Advanced Concepts (NIAC) program. So while many large-scale telescopes will be entering service in the near future, the next-next-generation of telescopes could include a few arrays made up of swarms of robots directed by artificial intelligence.
Such arrays would be capable of achieving high-resolution astronomy and interferometry at lower costs, and could free up large, complex arrays for other observations.