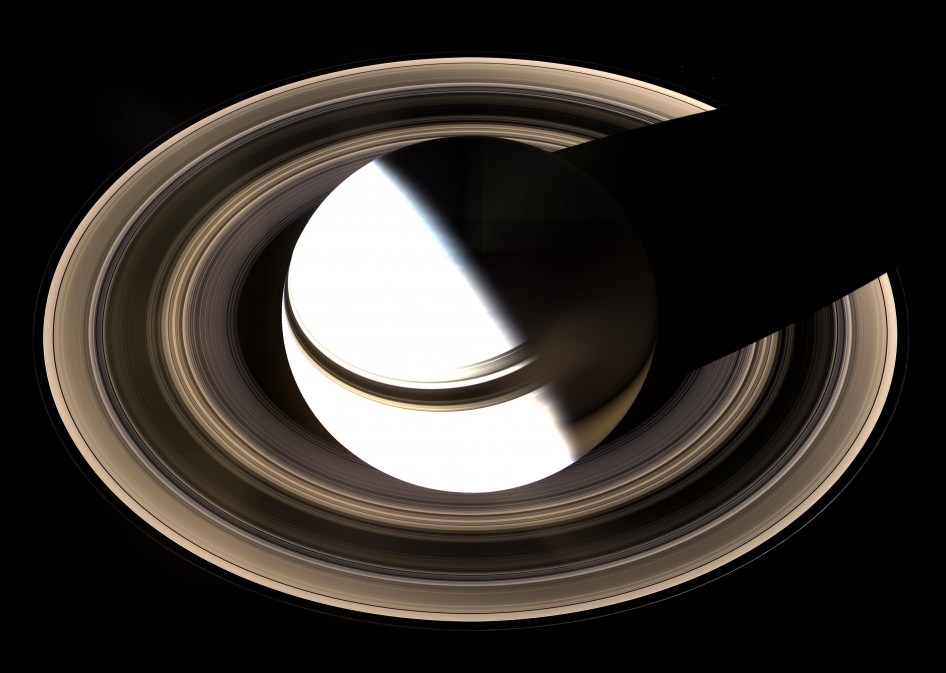
The Cassini spacecraft uses a Pi Transfer to navigate its path around Saturn. Credit: NASA.
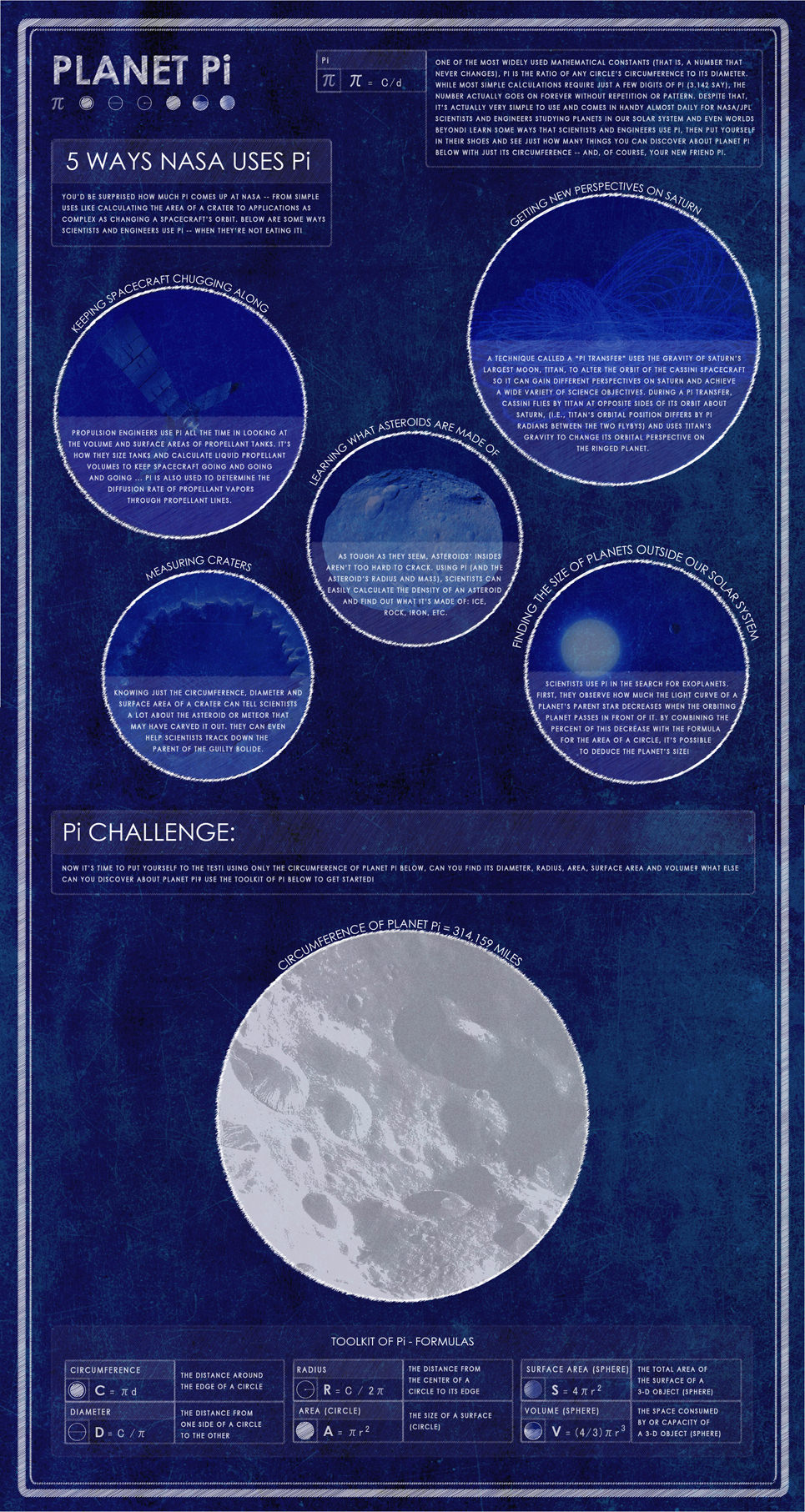
Got circles on the brain today? It’s Pi Day — (3/14 for those of us on the west side of the pond) and a celebration of math and science – as well as the infinite and irrational! It is also Albert Einstein’s birthday. What’s Pi? Π is the 16th letter in the Greek alphabet and is used to represent a mathematical constant, the ratio of a circle’s circumference to its diameter, approximately equal to 3.1415…
In basic mathematics, Pi is used to find area and circumference of a circle. You might not use it yourself every day, but Pi is used in most calculations for building and construction, quantum physics, communications, music theory, medical procedures, air travel, and space flight, to name a few.
You might imagine that NASA regularly uses Π to calculate trajectories of spacecraft. Above is a visible documentation of a technique called a “pi transfer” used by the Cassini spacecraft to complete a maneuver to fly by Saturn’s moon Titan flyby.
NASA explains:
A pi transfer uses the gravity of Saturn’s largest moon, Titan, to alter the orbit of the Cassini spacecraft so it can gain different perspectives on Saturn and achieve a wide variety of science objectives. During a pi transfer, Cassini flies by Titan at opposite sides of its orbit about Saturn (i.e., Titan’s orbital position differs by pi radians between the two flybys) and uses Titan’s gravity to change its orbital perspective on the ringed planet.
This image was taken on January 19, 2007, showing the perspective the spacecraft had of Saturn and its rings during the pi transfer.
Other ways NASA uses Pi is to determine the size of craters and extrasolar planets, figuring out how much propellent a spacecraft has, and learning what an asteroid is made of. Mike Seibert from the Mars Exploration Rover team explained on Twitter today how they use Pi every day to talk to the Opportunity rover:
Fact: We use pi is used every single sol when operating Opportunity. Robots like radians, humans like degrees. Pi is our translator.
Engineers prepare the Morpheus craft for its FF9 test flight on March 11, 2014 (NASA)
)
NASA’s Project Morpheus nailed it again today with yet another successful free flight of their prototype lander, soaring higher, faster, and farther than ever before! Go Morpheus!
The FF9 test, which occurred at 3:41 p.m. EDT at Kennedy Space Center, saw the 2,300-lb (1000-kg) Morpheus craft rise to a height of 580 feet (177 meters) and travel 837 feet (255 m) downrange at 30 mph (48 km/h). After the 85-second flight the craft set down almost exactly on target — only about a foot (.3 m) off.
During today’s test flight the oxygen-and-methane-propelled Morpheus could have cleared the Washington Monument.
The next step is to integrate the Autonomous Landing and Hazard Avoidance Technology (ALHAT) sensors, which allow the craft to identify dangerous terrain and determine the best route to a safe landing — all by itself. This capability will be invaluable for future landings on unexplored surfaces on the Moon and Mars.
“It’s never been done,” said Dr. Jon Olansen, project manager of the Morpheus Project, in 2012. “We’ve never landed of the moon or Mars with real-time hazard detection and avoidance. Most of the Mars missions use air bags. They go where they go, they roll them and they stop… whatever comes, comes.”
Like many kids his age, 4-year-old Lucas Whiteley is fascinated about space and astronauts and has a lot of questions to ask. Unlike most kids, though, Lucas got his answers directly from a NASA engineer, with a custom-made video no less!
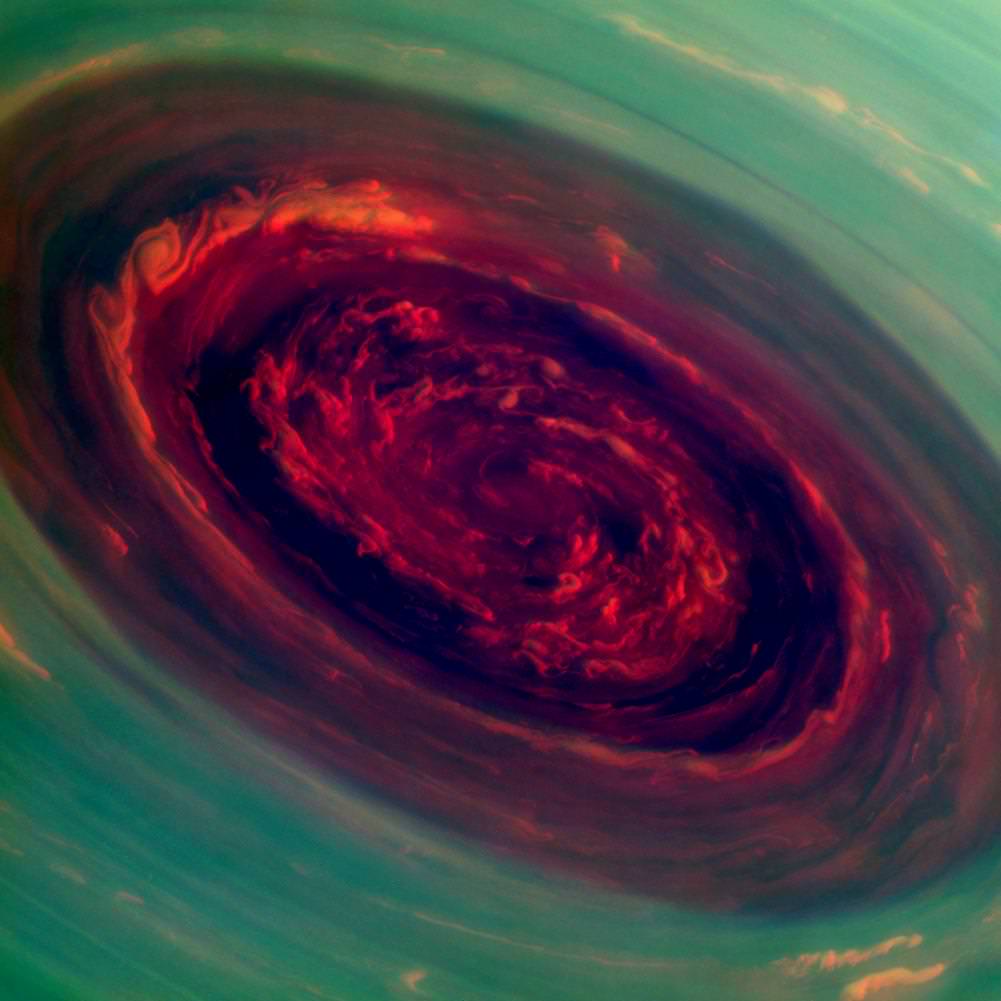
A false-color image, taken by the Cassini spacecraft, of a huge hurricane at Saturn's north pole. Credit: NASA/JPL-Caltech/SSI
With the premiere of the revamped “Cosmos” series, NASA used this opportunity to showcase the imagery and missions that are such a big part of our explorations of the Universe, live-Tweeting during the show:
The Goddard Space Flight Center Flickr page featured a gallery of images from the cosmos, many which are part of the “Cosmos” series. See a sampling of great images below:
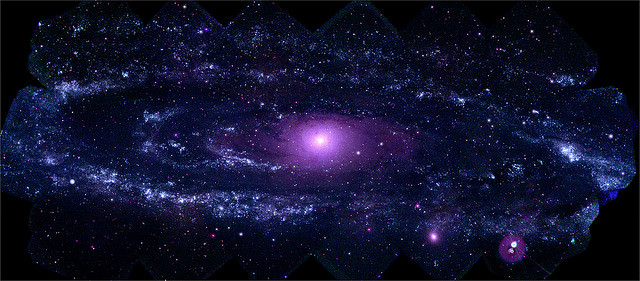
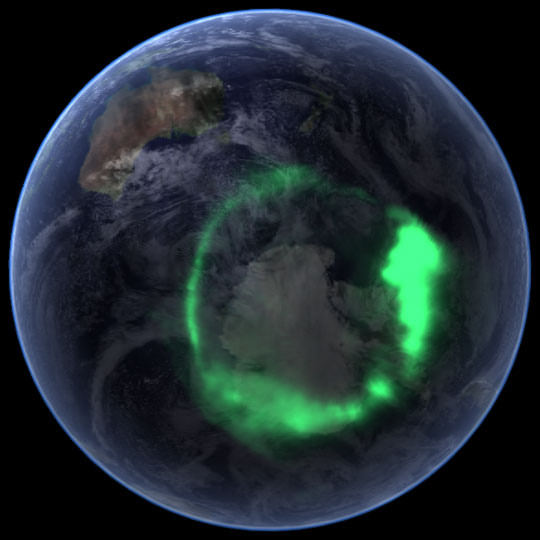
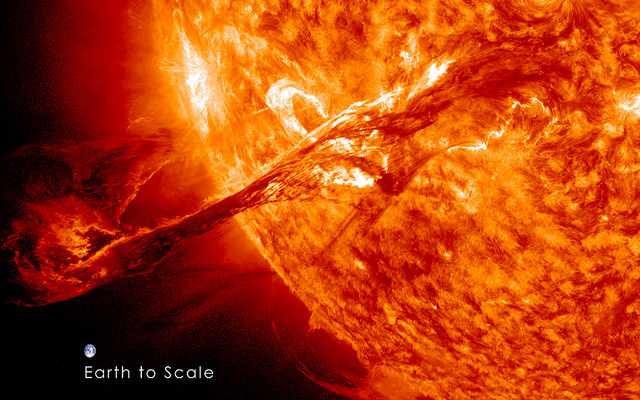
This mosaic of M31 merges 330 individual images taken by the Ultraviolet/Optical Telescope aboard NASA’s Swift spacecraft. It is the highest-resolution image of the galaxy ever recorded in the ultraviolet. The image shows a region 200,000 light-years wide and 100,000 light-years high (100 arcminutes by 50 arcminutes). Credit: NASA/Swift/Stefan Immler (GSFC) and Erin Grand (UMCP)NASA’s IMAGE Spacecraft View of Aurora Australis from Space. Credit: NASA.On August 31, 2012 a long filament of solar material that had been hovering in the sun’s atmosphere, the corona, erupted out into space at 4:36 p.m. EDT. The coronal mass ejection, or CME, traveled at over 900 miles per second. The CME did not travel directly toward Earth, but did connect with Earth’s magnetic environment, or magnetosphere, causing aurora to appear on the night of Monday, September 3. The image above includes an image of Earth to show the size of the CME compared to the size of Earth. Credit: NASA/GSFC/SDOThis planetary nebula’s simple, graceful appearance is thought to be due to perspective: our view from Earth looking straight into what is actually a barrel-shaped cloud of gas shrugged off by a dying central star. Hot blue gas near the energizing central star gives way to progressively cooler green and yellow gas at greater distances with the coolest red gas along the outer boundary. Credit: NASA/Hubble Heritage TeamThis Hubble photo is of a small portion of one of the largest seen star-birth regions in the galaxy, the Carina Nebula. Towers of cool hydrogen laced with dust rise from the wall of the nebula. Credit: NASA, ESA, and M. Livio and the Hubble 20th Anniversary Team (STScI).
A SpaceX Falcon 9 rocket with Dragon cargo capsule bound for the ISS launched from Space Launch Complex 40 at Cape Canaveral, FL. File photo. Credit: Ken Kremer/kenkremer.com
The historic blast off of the first SpaceX rocket equipped with ‘landing legs’ and also carrying a private Dragon cargo vessel bound for the Space Station is now slated for March 16 following a short and “successful” hot fire check test of the first stage engines on Saturday, March 8.
It’s T Minus 1 week to lift off !
The brief two second ignition of all nine upgraded Merlin 1D engines powering the first stage of SpaceX’s next generation, commercial Falcon 9 rocket at the end of a simulated countdown is a key test required to clear the way for next Sunday’s planned night time lift off at 4:41 a.m. EDT from Space Launch Complex 40 at Cape Canaveral Air Force Station in Florida.
“Falcon 9 and Dragon conducted a successful static fire test in advance of next week’s CRS-3 launch to station!” SpaceX announced today.
The primary goal of the unmanned SpaceX CRS-3 mission is to deliver over 5000 pounds of science experiments, gear and supplies loaded inside Dragon to the six person crew living and working aboard the International Space Station (ISS) flying in low Earth orbit under NASA’s Commercial Resupply Services (CRS) contract.
“In this final major preflight test, Falcon 9’s 9 first-stage engines were ignited for 2 seconds while the vehicle was held down to the pad,” said SpaceX.
All four landing legs now mounted on Falcon 9 rocket being processed inside hanger at Cape Canaveral, FL for Mar 16 launch. Credit: SpaceX/Elon Musk
The static hot firing is a full up assessment of the rocket, engines, propellant loading and countdown procedures leading to a launch. The engines typically fire for a barely a few seconds.
SpaceX engineers will evaluate the engine firing to ensure all systems are ready for launch.
This commercial Falcon 9 rocket is equipped for the first time with a quartet of landing legs, Elon Musk, the company’s founder and CEO, announced recently as outlined in my story – here.
The attachment of landing legs to the first stage of SpaceX’s next-generation Falcon 9 rocket counts as a major step towards the firm’s future goal of building a fully reusable rocket.
The eventual goal is to accomplish a successful first stage touchdown by the landing legs on solid ground back at Cape Canaveral, Florida.
For this Falcon 9 flight, the rocket will sprout legs for a controlled soft landing in the Atlantic Ocean guided by SpaceX engineers.
Extensive work and testing remains to develop and refine the technology before a land landing will be attempted by the company.
“F9 will continue to land in the ocean until we prove precision control from hypersonic thru subsonic regimes,” Musk says.
1st stage of SpaceX Falcon 9 rocket equipped with landing legs and now scheduled for launch to the International Space Station on March 16, 2014 from Cape Canaveral, FL. Credit: SpaceX/Elon Musk
SpaceX hopes the incorporation of landing legs will one day lead to cheaper, reusable boosters that can be manufactured at vastly reduced cost.
The March 16 launch will be the fourth overall for the next generation Falcon 9 rocket, but the first one capped with a Dragon and heading to the massive orbital lab complex.
Falcon 9 and Dragon static fire test on March 8, 2014. Credit: SpaceX
Three prior launches of the more powerful Falcon 9 lofting commercial telecom satellites in September and December 2013 and January 2014 were all successful and paved the way for SpaceX’s new mission to the ISS.
And this Dragon is loaded with the heaviest manifest yet.
The research cargo includes 100 protein crystal experiments that will allow scientists to observe the growth of crystals in zero-G.
In the absence of gravity, the crystals will hopefully grow to much larger sizes than here on Earth and afford scientists new insights into designing and developing new drugs and pesticides.
SpaceX is under contract to NASA to deliver 20,000 kg (44,000 pounds) of cargo to the ISS during a dozen Dragon cargo spacecraft flights over the next few years at a cost of about $1.6 Billion.
Next Generation SpaceX Falcon 9 rocket blasts off with SES-8 communications satellite on Dec. 3, 2013 from Pad 40 at Cape Canaveral, FL. Credit: Ken Kremer/kenkremer.com
To date SpaceX has completed two operational cargo resupply missions. The last flight dubbed CRS-2 blasted off a year ago on March 1, 2013 atop the initial version of the Falcon 9 rocket.
If the launch takes place as planned on March 16, Dragon will rendezvous and dock at the Earth facing port on the station’s Harmony module, after a two day orbital chase, on March 18.
Both the Dragon and Cygnus resupply spacecraft were privately developed with seed money from NASA in a public-private partnership in order to restore the cargo up mass capability the US completely lost following the retirement of NASA’s space shuttle orbiters in 2011.
The Dragon docking will take place a few days after Monday’s (March 10) scheduled departure of three crew members aboard a Russian Soyuz capsule.
Watch the Soyuz leave live on NASA TV.
The departure of Russian cosmonauts Oleg Kotov and Sergey Ryazanskiy along with NASA astronauts Mike Hopkins marks the end of Expedition 38 and the beginning of Expedition 39.
It also leaves only a three person crew on board to greet the Dragon.
The Soyuz return to Earth comes amidst the ongoing Crimean crisis as tensions continue to flare between Russian, Ukraine and the West.
Expedition 38 crew members proudly sport their national flags in this March 2014 picture from the International Space Station. Pictured (clockwise from top center) are Russian cosmonaut Oleg Kotov, commander; Japan Aerospace Exploration Agency astronaut Koichi Wakata, Russian cosmonaut Sergey Ryazanskiy, NASA astronauts Rick Mastracchio and Mike Hopkins, and Russian cosmonaut Mikhail Tyurin, all flight engineers. Credit: NASA
Command of the station was passed today from Oleg Kotov to the Japan Aerospace Exploration Agency astronaut Koichi Wakata.
With the start of Expedition 39, Wakata thus becomes the first Japanese astronaut to command the ISS.
Wakata and NASA astronaut Rick Mastracchio with use the stations Canadarm 2 to grapple and berth Dragon to its docking port.
Dragon is due to stay at station for about three weeks until April 17.
Then it will undock and set course for a parachute assisted splash down in the Pacific Ocean off the coast of Baja California.
For the return to Earth, Dragon will be packed with more than 3,500 pounds of highly valuable experiment samples accumulated from the crews onboard research as well as assorted equipment and no longer need items.
Stay tuned here for Ken’s continuing SpaceX, Orbital Sciences, commercial space, Orion, Chang’e-3, LADEE, Mars rover, MAVEN, MOM and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF astro/space convention on April 12/13.
And watch for Ken’s upcoming SpaceX launch coverage at Cape Canaveral & the Kennedy Space Center press site.
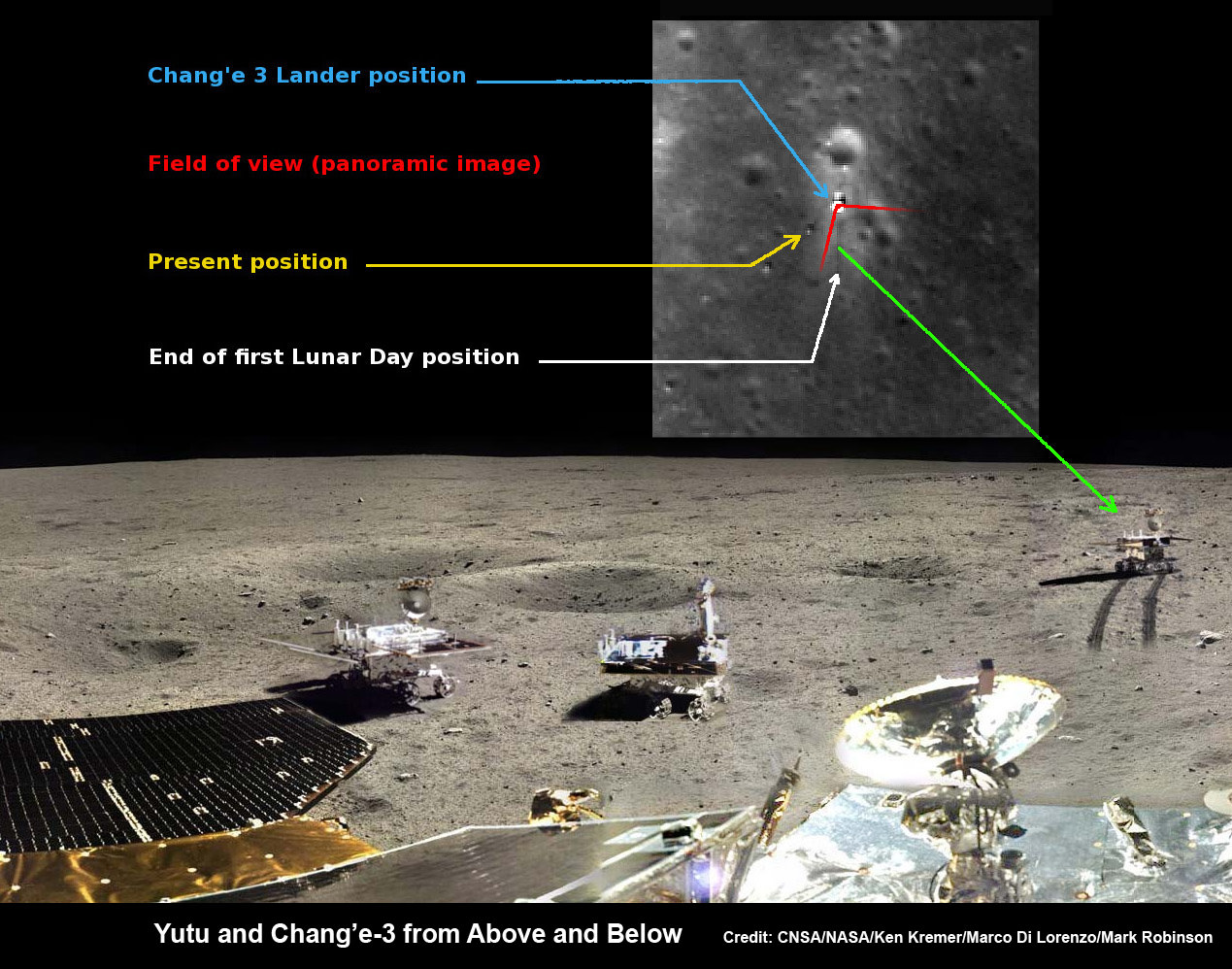
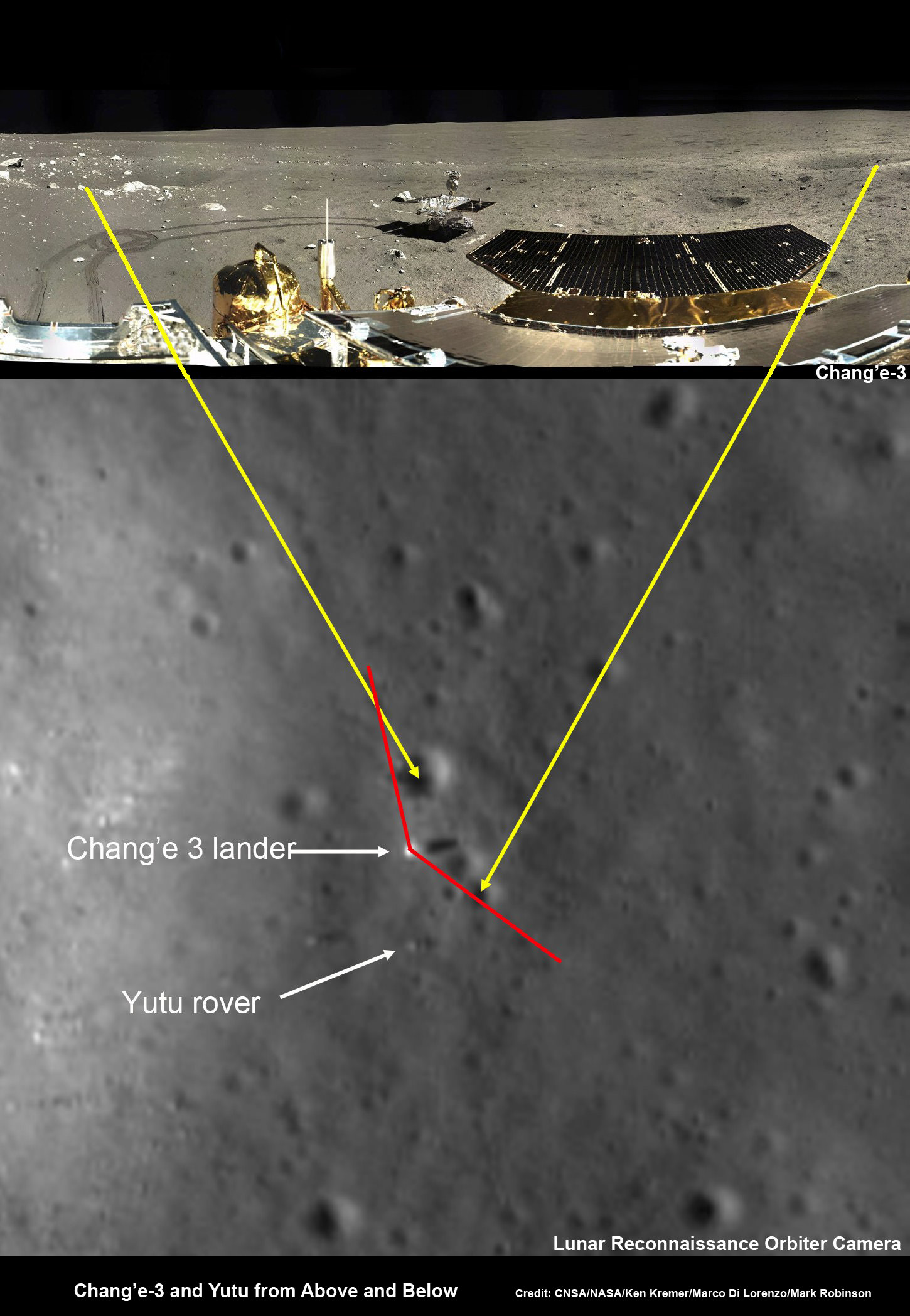
Yutu rover drives around Chang’e-3 lander – from Above And Below. Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu rover drives around Chang’e-3 lander – from Above And Below
Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time.
Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
See below more mosaics and LRO imagery
Story updated[/caption]
The powerful telescopic camera aboard NASA’s Lunar Reconnaissance Orbiter (LRO) has captured spectacular new images detailing the traverse of China’s Yutu moon rover around the landing site during its first two months exploring the Moon’s pockmarked grey terrain.
The newly released high resolution LRO images even show Yutu’s tracks cutting into the lunar surface as the world famous Chinese robot drove in a clockwise direction around the Chang’e-3 lander that delivered it to the ground in mid-December 2013.
You can precisely follow Yutu’s movements over time – from ‘above and below’ – in our new composite view (shown above) combining the latest LRO image with our timelapse mosaic showing the rover’s history making path from the touchdown point last December to today’s location.
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
Barely seven hours after touchdown, the six wheeled moon buggy drove down a pair of ramps onto the desolate gray plains of the lunar surface at Mare Imbrium (Sea of Rains) covered by volcanic material.
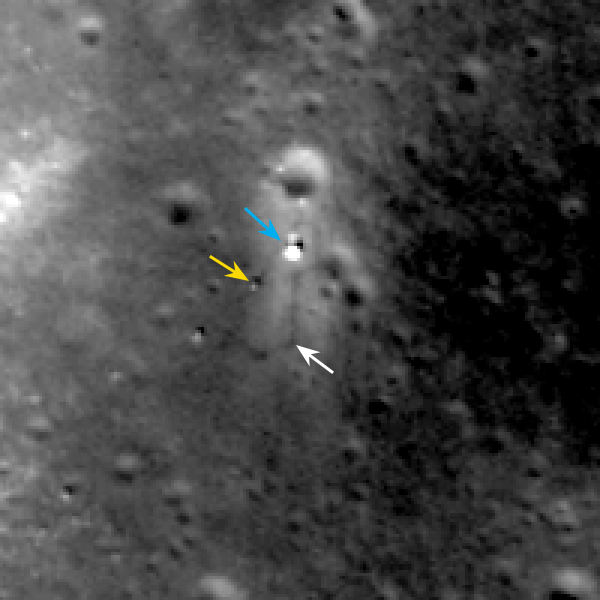
LROC February 2014 image of Chang’e 3 site. Blue arrow indicates Chang’e 3 lander; yellow arrow points to Yutu (rover); and white arrow marks the December location of Yutu. Yutu’s tracks can be followed clockwise around the lander to its current location. Image width 200 meters (about 656 feet). Credit: NASA/Goddard/Arizona State University
Altogether three images of the rover and lander have been taken to date by the Lunar Reconnaissance Orbiter Camera (LROC) aboard LRO – specifically the hi res narrow angle camera (NAC).
The LROC NAC images were captured on Dec. 25, 2013, Jan. 21, 2014 and Feb. 17, 2014 as LRO soared overhead.
The four image LRO composite below includes a pre-landing image taken on June 30, 2013.
Four LROC NAC views of the Chang’e 3 landing site. A) before landing, June 30, 2013 B) after landing, Dec. 25, 2013 C) Jan. 21, 2014 D) Feb. 17, 2014 Width of each image is 200 meters (about 656 feet). Follow Yutu’s path clockwise around the lander in “D.” Credit: NASA/Goddard/Arizona State University
Since the solar incidence angles were different, the local topography and reflectance changes between images showing different levels of details.
“In the case of the Chang’e 3 site, with the sun higher in the sky one can now see the rover Yutu’s tracks (in the February image),” wrote Mark Robinson, Principal Investigator for the LROC camera in an LRO update.
The solar powered rover and lander can only operate during periods of lunar daylight, which last 14 days each.
During each lunar night, they both must power down and enter hibernate mode since there is no sunlight available to generate power and no communications are possible with Earth.
Here is a gif animation from the NASA LRO team combining all four LROC images.
Four views of the Chang’e 3 landing site from before the landing until Feb. 2014. Credit: NASA/GSFC/Arizona State University
During Lunar Day 1, Yutu drove down the landers ramps and moved around the right side in a clockwise direction.
By the end of the first lunar day, Yutu had driven to a position about 30 meters (100 feet) south of the Chang’e-3 lander, based on the imagery.
See our complete 360 degree timelapse color panorama from Lunar Day 1 herein and at NASA APOD on Feb. 3, 2014 – assembled by Marco Di Lorenzo and Ken Kremer.
360-degree time-lapse color panorama from China’s Chang’e-3 lander. This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
After awakening for Lunar Day 2, Yutu then moved northwest and parked about 17 meters (56 feet) southwest of the lander, according to Robinson.
By comparing the Janaury and February images “it is apparent that Yutu did not move appreciably from the January location,” said Robinson.
At this moment Yutu and the companion Chang’e-3 lander are sleeping through their 3rd Lunar Night.
They entered hibernation mode on Feb. 22 and Feb. 23, 2014 respectively.
Hopefully both probes will awaken from their slumber sometime in the next week when the Moon again basks in daylight glow to begin a 4th day of lunar surface science operations.
“We all wish it would be able to wake up again,” said Ye Peijian, chief scientist of the Chang’e-3 program, according to CCTV, China’s state run broadcaster.
However, the hugely popular ‘Yutu’ rover is still suffering from an inability to maneuver its life giving solar panels. It is also unable to move – as I reported here.
The 140 kg rover is now nearing its planned 3 month long life expectancy on a moon roving expedition to investigate the moon’s surface composition and natural resources.
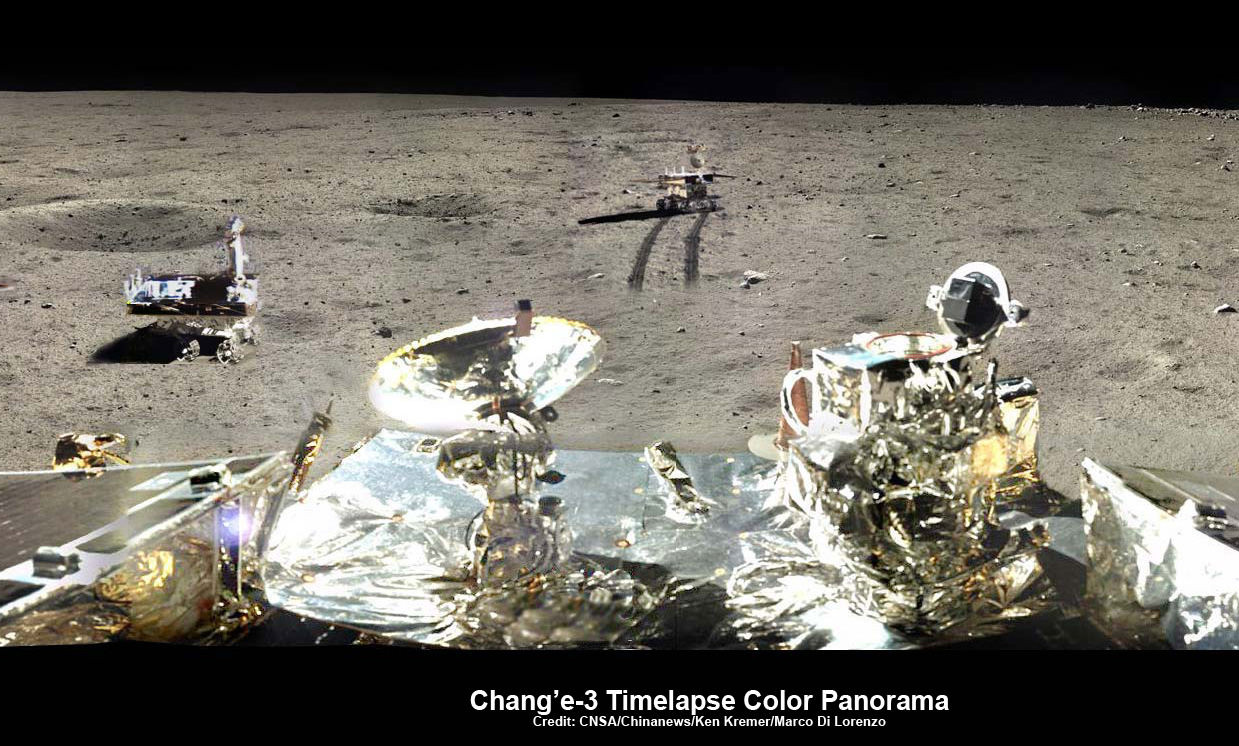
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF astro/space convention on April 12/13.
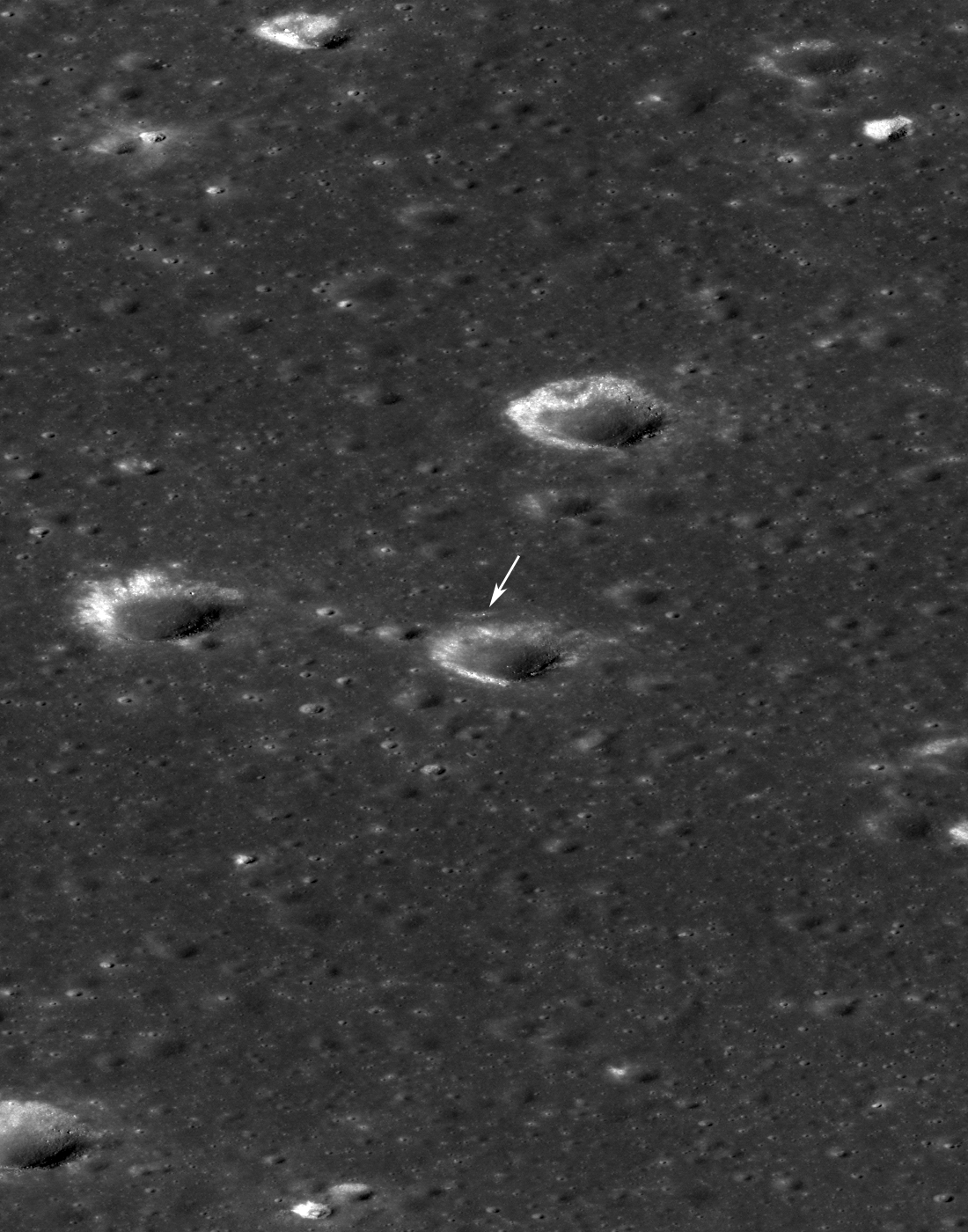
Chang’e-3 lander and Yutu rover – from Above And Below Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark RobinsonLRO slewed 54 degrees to the east on Feb. 16, 2014, to allow the LROC instrument to snap a dramatic oblique view of the Chang’e 3 site (arrow). Crater in front of lander is 450 meters (about 1,476 feet) in diameter. Image width is 2,900 meters (about 9,500 feet) at the center. Credit: NASA/Goddard/Arizona State University
The International Space Station (ISS) in low Earth orbit.
The sole way for every American and station partner astronaut to fly to space and the ISS is aboard the Russian Soyuz manned capsule since the retirement of NASA’s Space Shuttles in 2011. There are currently NO alternatives to Russia’s Soyuz. Credit: NASA
The International Space Station (ISS) in low Earth orbit
The sole way for every American and station partner astronaut to fly to space and the ISS is aboard the Russian Soyuz manned capsule since the retirement of NASA’s Space Shuttles in 2011. There are currently NO alternatives to Russia’s Soyuz. Credit: NASA[/caption]
Virtually every aspect of the manned and unmanned US space program – including NASA, other government agencies, private aerospace company’s and crucially important US national security payloads – are highly dependent on Russian & Ukrainian rocketry and are therefore potentially at risk amidst the current Crimea crisis as tensions flared up dangerously in recent days between Ukraine and Russia with global repercussions.
The International Space Station (ISS), astronaut rides to space and back, the Atlas V and Antares rockets and even critical U.S. spy satellites providing vital, real time intelligence gathering are among the examples of programs that may be in peril if events deteriorate or worse yet, spin out of control.
The Crimean confrontation and all the threats and counter threats of armed conflicts and economic sanctions shines a spotlight on US vulnerabilities regarding space exploration, private industry and US national security programs, missions, satellites and rockets.
The consequences of escalating tensions could be catastrophic for all sides.
Many Americans are likely unaware of the extent to which the US, Russian and Ukrainian space programs, assets and booster rockets are inextricably intertwined and interdependent.
First, let’s look at America’s dependency on Russia regarding the ISS.
The massive orbiting lab complex is a partnership of 15 nations and five space agencies worldwide – including Russia’s Roscosmos and the US NASA. The station is currently occupied by a six person crew of three Russians, two Americans and one Japanese.
Since the forced retirement of NASA’s space shuttle program in 2011, America completely lost its own human spaceflight capability. So now the only ticket for astronauts to space and back is by way of the Russian Soyuz capsule.
Expedition 38 crew members proudly sport their national flags in this March 2014 picture from the International Space Station. Pictured (clockwise from top center) are Russian cosmonaut Oleg Kotov, commander; Japan Aerospace Exploration Agency astronaut Koichi Wakata, Russian cosmonaut Sergey Ryazanskiy, NASA astronauts Rick Mastracchio and Mike Hopkins, and Russian cosmonaut Mikhail Tyurin, all flight engineers. Credit: NASA
American and station partner astronauts are 100% dependent on Russia’s three seat Soyuz capsule and rocket for rides to the ISS.
Russia has a monopoly on reaching the station because the shuttle was shut down by political ‘leaders’ in Washington, DC before a new U.S. manned space system was brought online.
And congressional budget cutters have repeatedly slashed NASA’s budget, thereby increasing the gap in US manned spaceflight launches from American soil by several years already.
Congress was repeatedly warned of the consequences by NASA and responded with further reductions to NASA’s budget.
In a continuation of the normal crew rotation routines, three current crew members are set to depart the ISS in a Soyuz and descend to Earth on Monday, March 10.
Coincidentally, one of those Russian crew members, Oleg Kotov, was actually born in Crimea when it was part of the former Soviet Union.
A new three man crew of two Russians and one American is set to blast off in their Soyuz capsule from Russia’s launch pad in Kazakhstan on March 25.
The U.S. pays Russia $70 million per Soyuz seat under the most recent contact, while American aerospace workers are unemployed.
The fastest and most cost effective path to restore America’s human spaceflight capability to low Earth orbit and the ISS is through NASA’s Commercial Crew Program (CCP) seeking to develop private ‘space taxis’ with Boeing, SpaceX and Sierra Nevada.
Alas, Congress has sliced NASA’s CCP funding request by about 50% each year and the 1st commercial crew flight to orbit has consequently been postponed by more than three years.
So it won’t be until 2017 at the earliest that NASA can end its total dependence on Russia’s Soyuz.
A sensible policy to eliminate US dependence on Russia would be to accelerate CCP, not cut it to the bone, especially in view of the Crimean crisis which remains unresolved as of this writing.
If U.S. access to Soyuz seats were to be cut off, the implications would be dire and it could mean the end of the ISS.
When NASA Administrator Chales Bolden was asked about contingencies at a briefing yesterday, March 4, he responded that everything is OK for now.
“Right now, everything is normal in our relationship with the Russians,” said Bolden.
“Missions up and down are on target.”
“People lose track of the fact that we have occupied the International Space Station now for 13 consecutive years uninterrupted, and that has been through multiple international crises.”
“I don’t think it’s an insignificant fact that we are starting to see a number of people with the idea that the International Space Station be nominated for the Nobel Peace Prize.”
But he urged Congress to fully fund CCP and avoid still more delays.
“Let me be clear about one thing,” Bolden said.
“The choice here is between fully funding the request to bring space launches back to the US or continuing millions in subsidies to the Russians. It’s that simple. The Obama administration chooses investing in America, and we believe Congress will choose this course as well.”
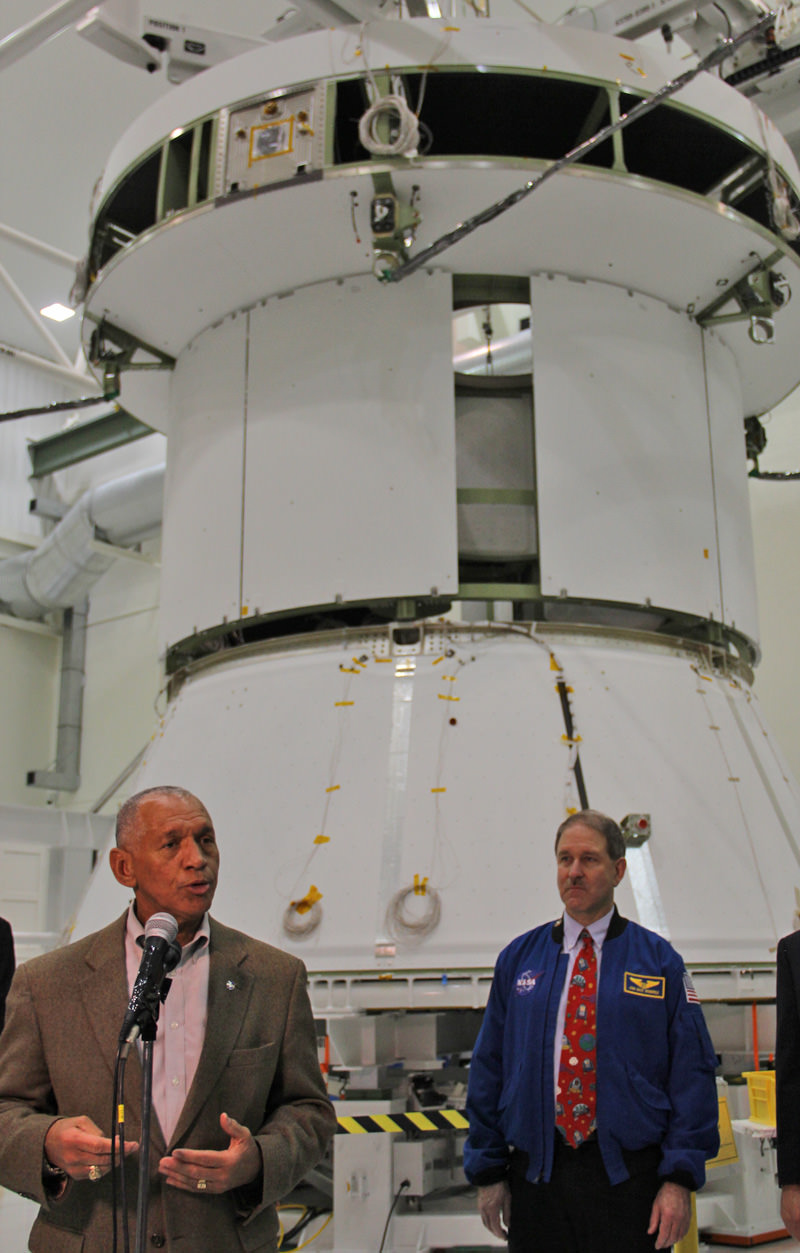
NASA Administrator Charles Bolden discusses NASA’s human spaceflight initiatives backdropped by the service module for the Orion crew capsule being assembled at the Kennedy Space Center. Credit: Ken Kremer/kenkremer.com
Now let’s examine a few American rockets which include substantial Russian and Ukrainian components – without which they cannot lift one nanometer off the ground.
The Atlas V rocket developed by United Launch Alliance is the current workhorse of the US expendable rocket fleet.
Coincidentally the next Atlas V due to blastoff on March 25 will carry a top secret spy satellite for the U.S. National Reconnaissance Office (NRO).
The Atlas V first stage however is powered by the Russian built and supplied RD-180 rocket engine.
Several Air Force – DOD satellites are launched on the Atlas V every year.
Many NASA probes also used the Atlas V including Curiosity, MAVEN, Juno and TDRS to name just a few.
NASA’s Mars bound MAVEN spacecraft launches atop Atlas V booster at 1:28 p.m. EST from Space Launch Complex 41 at Cape Canaveral Air Force Station on Nov. 18, 2013. Image taken from the roof of the Vehicle Assembly Building (VAB) at NASA’s Kennedy Space Center. Credit: Ken Kremer/kenkremer.com
What will happen to shipments of the dual nozzle, dual chamber RD-180’s manufactured by Russia’s NPO Energomesh in the event of economic sanctions or worse? It’s anyone’s guess.
ULA also manufactures the Delta IV expendable rocket which is virtually all American made and has successfully launched numerous US national security payloads.
The Antares rocket and Cygnus resupply freighter developed by Orbital Sciences are essential to NASA’s plans to restore US cargo delivery runs to the ISS – another US capability lost by voluntarily stopping shuttle flights. .
Orbital Sciences and SpaceX are both under contract with NASA to deliver 20,000 kg of supplies to the station. And they both have now successfully docked their cargo vehicles – Cygnus and Dragon – to the ISS.
The first stage of Antares is built in Ukraine by the Yuzhnoye Design Bureau and Yuzhmash.
And the Ukrainian booster factory is located in the predominantly Russian speaking eastern region – making for an even more complicated situation.
Antares rocket raised at NASA Wallops launch pad 0A bound for the ISS on Sept 18, 2013. Credit: Ken Kremer (kenkremer.com)
By contrast, the SpaceX Falcon 9 rocket and Dragon cargo vessel is virtually entirely American built and not subject to economic embargoes.
At a US Congressional hearing held today (March 5) dealing with national security issues, SpaceX CEO Elon Musk underscored the crucial differences in availability between the Falcon 9 and Atlas V in this excerpt from his testimony:
“In light of Russia’s de facto annexation of the Ukraine’s Crimea region and the formal severing of military ties, the Atlas V cannot possibly be described as providing “assured access to space” for our nation when supply of the main engine depends on President Putin’s permission, said Space X CEO and founder Elon Musk, at the US Senate appropriations subcommittee hearing on Defense.
Next Generation SpaceX Falcon 9 rocket blasts off with SES-8 communications satellite on Dec. 3, 2013 from Pad 40 at Cape Canaveral, FL. Credit: Ken Kremer/kenkremer.com
So, continuing operations of the ISS and US National Security are potentially held hostage to the whims of Russian President Vladimir Putin.
Russia has threatened to retaliate with sanctions against the West, if the West institutes sanctions against Russia.
The Crimean crisis is without a doubt the most dangerous East-West conflict since the end of the Cold War.
Right now no one knows the future outcome of the crisis in Crimea. Diplomats are talking but some limited military assets on both sides are reportedly on the move today.
Stay tuned here for Ken’s continuing Orbital Sciences, SpaceX, Orion, commercial space, Chang’e-3, LADEE, Mars and more planetary and human spaceflight news.
Final Space Shuttle liftoff marks start of US dependency on Russia for human access to space.
Space Shuttle Atlantis thunders to life at Launch Pad 39 A at KSC on July 8, 2011. Credit: Ken Kremer
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama.
Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo.
See our complete 5 position Yutu timelapse pano herein and 3 position pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
Story updated[/caption]
The serious technical malfunction afflicting the life and continued operations of China’s Yutu moon rover since the start of its second Lunar Night time hibernation in late January 2014 has been identified as an inability to properly maneuver the life giving solar panels, according to a top Chinese space official.
“Yutu suffered a control circuit malfunction in its driving unit,” according to a newly published report on March 1 by the state owned Xinhua news agency.
“The control circuit problem prevented Yutu from entering the second dormancy as planned,” said Ye Peijian, chief scientist of the Chang’e-3 program, in an exclusive interview with Xinhua.
At the time that Yutu’s 2nd Lunar sleep period began on Jan. 25, 2014, Chinese space officials had announced that the robot’s future was in jeopardy after it suffered an unidentified “ mechanical control anomaly” due to the “complicated lunar surface.”
A functioning control circuit is required to lower the rovers mast and protect the delicate components and instruments mounted on the mast from directly suffering from the extremely harsh cold of the Moon’s recurring night time periods.
“Normal dormancy needs Yutu to fold its mast and solar panels,” said Ye.
The high gain communications antenna and the imaging cameras are attached to the mast.
They must be folded down into a warmed electronics box to shield them from the damaging effects of the Moon’s nightfall when temperatures plunge dramatically to below minus 180 Celsius, or minus 292 degrees Fahrenheit.
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
The solar panels also generate power during each Lunar day to keep the robot alive and conduct its mission of scientific exploration roving across the lunar terrain.
The rover and Chang’e-3 stationary lander must power down and sleep during each lunar night since there is no sunlight available to generate power and no communications are possible with Earth.
The panel driving unit also helps maneuver the panels into position to efficiently point to the sun to maximize the electrical output.
“The driving unit malfunction prevented Yutu to do those actions” said Ye.
Each lunar day and night lasts for alternating periods of 14 Earth days.
“This means Yutu had to go through the lunar night in extremely low temperatures.”
Apparently the mast was not retracted and remained vertical during the lunar nights 2 and 3.
And the camera somehow survived the harsh temperature decline and managed to continue operating since it snapped two images of the Chan’ge-3 lander during Lunar Day 3. See our two image mosaic – below.
360-degree time-lapse color panorama from China’s Chang’e-3 lander. This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
In addition to being chief scientist of the Chang’e-3 program Ye is also a member of the National Committee of the Chinese People’s Political Consultative Conference, the country’s top political advisory body.
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
Barely seven hours after touchdown, the six wheeled moon buggy drove down a pair of ramps onto the desolate gray plains of the lunar surface at Mare Imbrium (Sea of Rains) covered by volcanic material.
For a time in mid-February, mission scientists feared that Yutu would no longer function when because no signals were received until two days later than the planned “awakening” from Lunar Night 2 on Feb. 10.
Mosaic of the Chang’e-3 moon lander and the lunar surface taken by the camera on China’s Yutu moon rover from a position south of the lander during Lunar Day 3. Note the landing ramp and rover tracks at left. Credit: CNSA/SASTIND/Xinhua/Marco Di Lorenzo/Ken Kremer
Fortunately, Yutu did finally wake up some 48 hours late on Feb. 12 and function on Lunar Day 3.
And the team engaged in troubleshooting to try and identify and rectify the technical problems.
Since then, Chinese space engineers engaged in troubleshooting to try and identify and rectify the technical problems in a race against time to find a solution before the start of Lunar Night 3.
“Yutu only carried out fixed point observations during its third lunar day.” according to China’s State Administration of Science, Technology and Industry for National Defence (SASTIND), responsible for the mission.
However it did complete some limited scientific observations. And fortunately the ground penetrating radar, panoramic and infrared imaging equipment all functioned normally.
Yutu and the companion Chang’e-3 lander have again gone into sleep mode during Lunar Night 3 on Feb. 22 and Feb 23 respectively, local Beijing time.
But the issue with the control circuit malfunction in its driving unit remains unresolved and still threatens the outlook for Yutu’s future exploration.
See our new Chang’e-3/Yutu lunar panoramas by Ken Kremer and Marco Di Lorenzo herein and at NASA APOD on Feb. 3, 2014.
Chang’e-3 lander and Yutu rover – from Above And Below Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu is now nearing its planned 3 month long life expectancy on a moon roving expedition to investigate the moon’s surface composition and natural resources.
The 1200 kg stationary lander is functioning normally. It is as expected to return science data about the Moon and conduct telescopic observations of the Earth and celestial objects for at least one year.
Yutu, which translates as ‘Jade Rabbit’ is named after the rabbit in Chinese mythology that lives on the Moon as a pet of the Moon goddess Chang’e.
“We all wish it would be able to wake up again,” said Ye according to CCTV, China’s state run broadcaster.
Ye will be reporting about Yutu and the Chang’e-3 mission at the annual session of the top advisory body, which opened today, Monday, March 3.
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, Curiosity, GPM, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF convention on April 12/13.
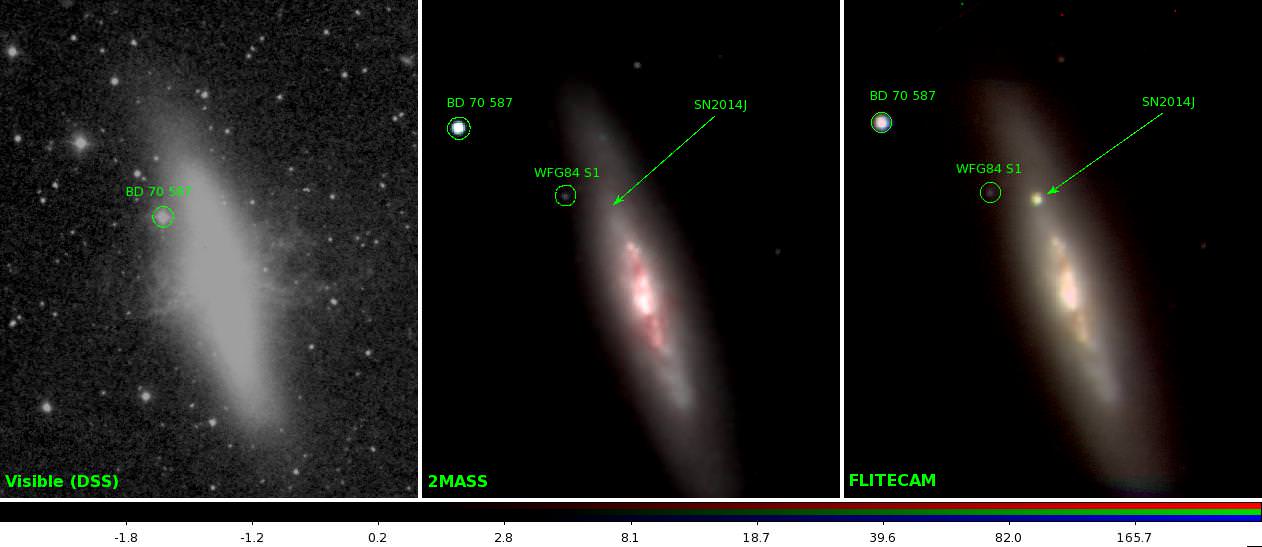
This Image of M82 including a supernova at near-infrared wavelengths J, H, and K (1.2, 1.65, and 2.2 microns), made Feb. 20 by the FLITECAM instrument on SOFIA. (NASA/SOFIA/FLITECAM team/S. Shenoy)
Astronomers wanting a closer look at the recent Type Ia supernova that erupted in M82 back in January are in luck. Thanks to NASA’s Stratospheric Observatory for Infrared Astronomy (SOFIA) near-infrared observations have been made from 43,000 feet — 29,000 feet higher than some of the world’s loftiest ground-based telescopes.
(And, technically, that is closer to M82. If only just a little.)
All sarcasm aside, there really is a benefit from that extra 29,000 feet. Earth’s atmosphere absorbs a lot of wavelengths of the electromagnetic spectrum, especially in the infrared and sub-millimeter ranges. So in order to best see what’s going on in the Universe in these very active wavelengths, observational instruments have to be placed in very high, dry (and thus also very remote) locations, sent entirely out into space, or, in the case of SOFIA, mounted inside a modified 747 where they can simply be flown above 99% of the atmosphere’s absorptive water vapor.
NASA’s airborne SOFIA observatory (SOFIA/USRA)
During a recent 10-hour flight over the Pacific, researchers aboard SOFIA turned their attention to SN2014J, one of the closest Type Ia “standard candle” supernovas that have ever been seen. It appeared suddenly in the relatively nearby Cigar Galaxy (M82) in mid-January and has since been an exciting target of observation for scientists and amateur skywatchers alike.
In addition to getting a bird’s-eye-view of a supernova, they used the opportunity to calibrate and test the FLITECAM (First Light Infrared Test Experiment CAMera) instrument, a near infrared camera with spectrographic capabilities mounted onto SOFIA’s 2.5-meter German-built main telescope.
What they’ve found are the light signatures of heavy metals being ejected by the exploding star. (Rock on, SN2014J.)
“When a Type Ia supernova explodes, the densest, hottest region within the core produces nickel 56,” said Howie Marion from the University of Texas at Austin, a co-investigator aboard the flight. “The radioactive decay of nickel-56 through cobalt-56 to iron-56 produces the light we are observing tonight. At this life phase of the supernova, about one month after we first saw the explosion, the H- and K-band spectra are dominated by lines of ionized cobalt. We plan to study the spectral features produced by these lines over a period of time and see how they change relative to each other. That will help us define the mass of the radioactive core of the supernova.”
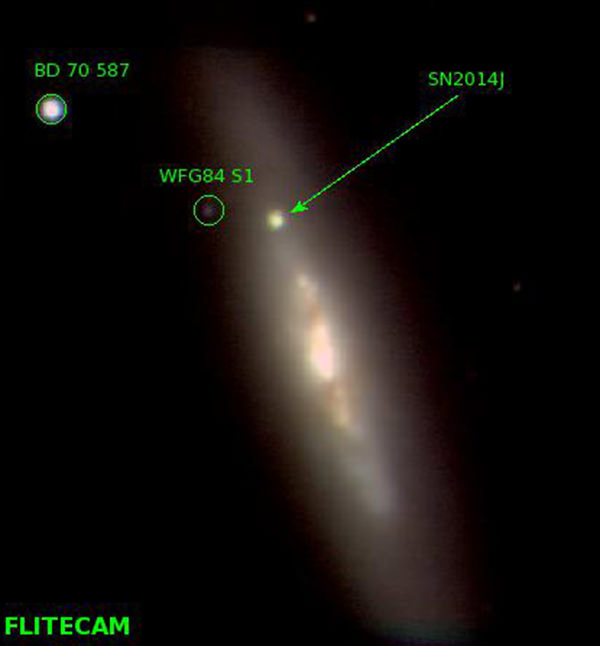
Three images of M82 and the supernova SN2014J, including one from the FLITECAM instrument on SOFIA (right). Credit: NASA/SOFIA/FLITECAM team/S. Shenoy
Further observations from SOFIA will help researchers learn more about the evolution of Type Ia supernovas, which in addition to being part of the life cycles of certain binary-pair stars are also valuable tools used by astronomers to determine distances to far-off galaxies.
Researchers work at the FLITECAM instrument station on board SOFIA on Feb. 20 (NASA/SOFIA/N. Veronico)
“To be able to observe the supernova without having to make assumptions about the absorption of the Earth’s atmosphere is great,” said Ian McLean, professor at UCLA and developer of FLITECAM. “You could make these observations from space as well, if there was a suitable infrared spectrograph to make those measurements, but right now there isn’t one. So this observation is something SOFIA can do that is absolutely unique and extremely valuable to the astronomical community.”
UPDATE 4 March 2014: The FY 2015 budget request proposed by the White House will effectively shelf the SOFIA mission, redirecting its funding toward planetary missions like Cassini and an upcoming Europa mission. Unfortunately, SOFIA’s flying days are now numbered, unless German partner DLR increases its contribution. Read more here.
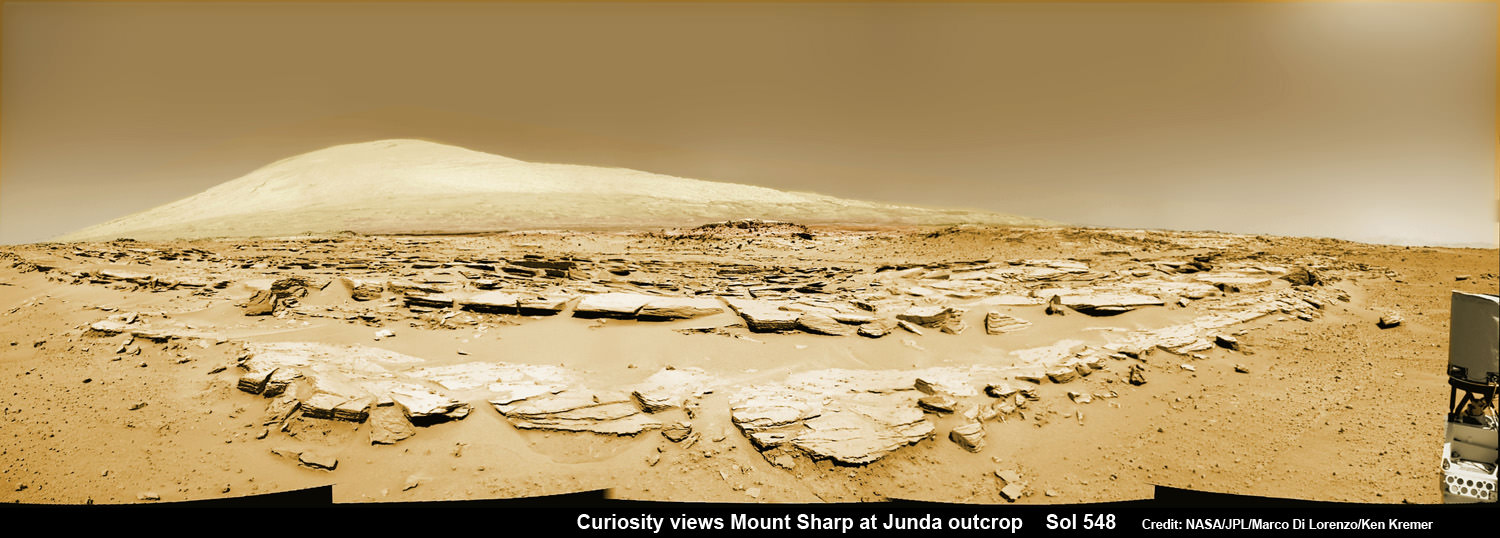
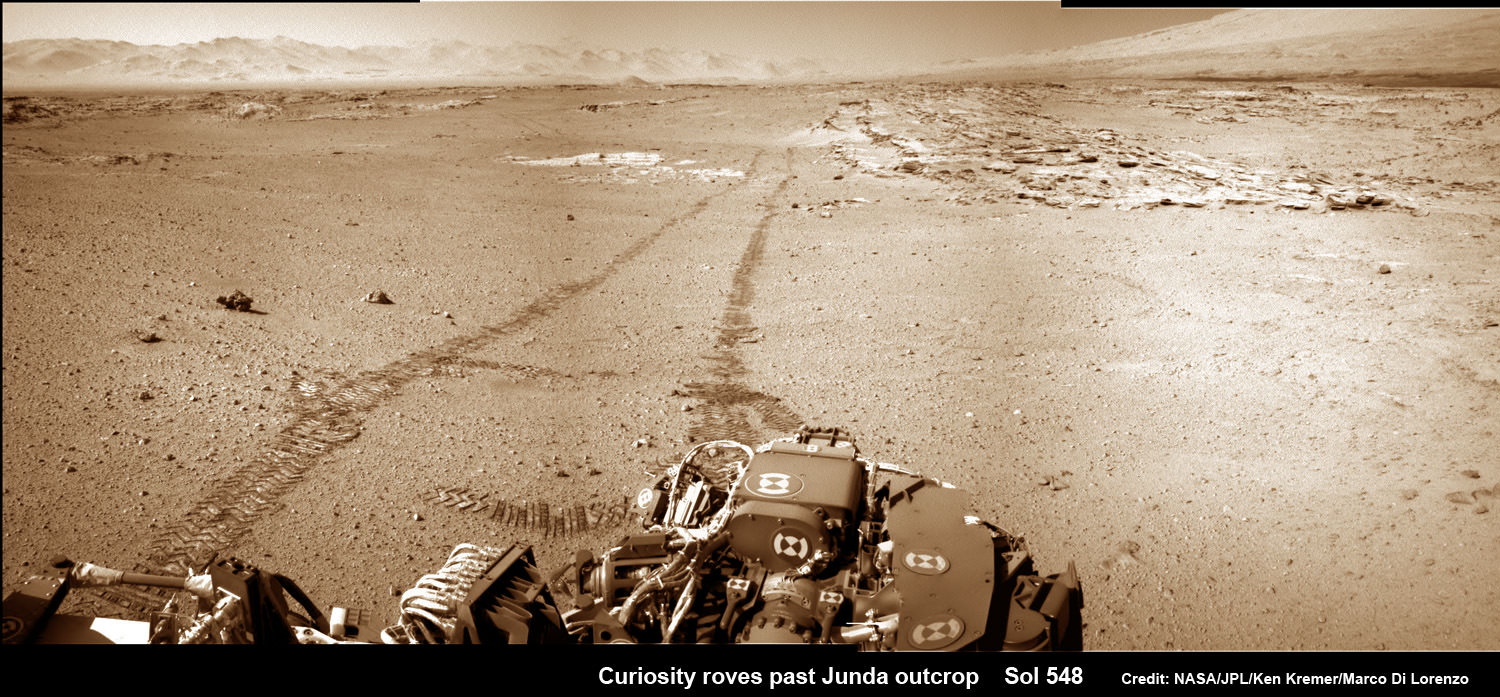
Mars rock rows and Mount Sharp. Martian landscape scene with rows of striated rocks in the foreground and Mount Sharp on the horizon. NASA's Curiosity Mars rover paused mid drive at the Junda outcrop to snap the component images for this navcam camera photomosaic on Sol 548 (Feb. 19, 2014) and then continued traveling southwards towards mountain base. UHF Antenna at right. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
Mars rock rows and Spectacular Mount Sharp
Martian landscape scene with rows of striated rocks in the foreground and spectacular Mount Sharp on the horizon. NASA’s Curiosity Mars rover paused mid drive at the Junda outcrop to snap the component images for this colorized navcam camera photomosaic on Sol 548 (Feb. 19, 2014) and then continued traveling southwards towards mountain base. UHF Antenna at right.
Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
See stereo 3-D and look back views below[/caption]
Like any good tourist, NASA’s rover Curiosity apparently couldn’t resist the photobug urge from a gorgeous Martian mountain scene she happened by recently and decided to pull over and enjoy the view.
So she stopped the dune buggy mid-drive on the sandy road to her daily destination one Sol last week on Feb. 19, powered up the camera suite and excitedly snapped a spectacular landscape view of a striated rock field dramatically back dropped by towering Mount Sharp on the horizon.
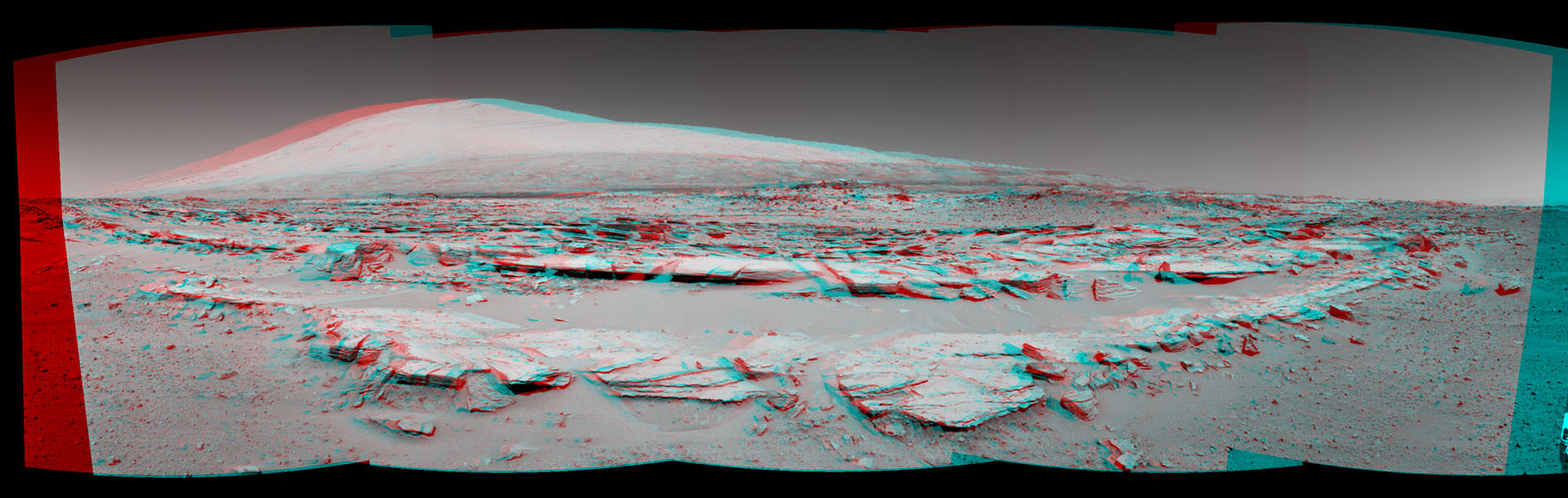
See our Mars rocks and Mount Sharp photomosaic above and a 3-D stereoscopic view from NASA below.
The sedimentary foothills of Mount Sharp, which reaches 3.4 miles (5.5 km) into the Martian sky, is the 1 ton robots ultimate destination inside Gale Crater because it holds caches of water altered minerals.
Martian Landscape With Rock Rows and Mount Sharp (Stereo) This stereo landscape scene from NASA’s Curiosity Mars rover on Feb. 19, 2014 shows rows of rocks in the foreground and Mount Sharp on the horizon. It appears three dimensional when viewed through red-blue glasses with the red lens on the left. Credit: NASA/JPL-Caltech
And just for good measure, Curiosity also snapped a series of breathtaking look back photos showing her tracks in the dune filled terrain from whence she came since straddling through the Dingo Gap gateway. See our mosaics below.
The panoramic mountain view taken on Sol 548 shows rows of striated rocks all oriented in a similar direction in the foreground with Mount Sharp in the background.
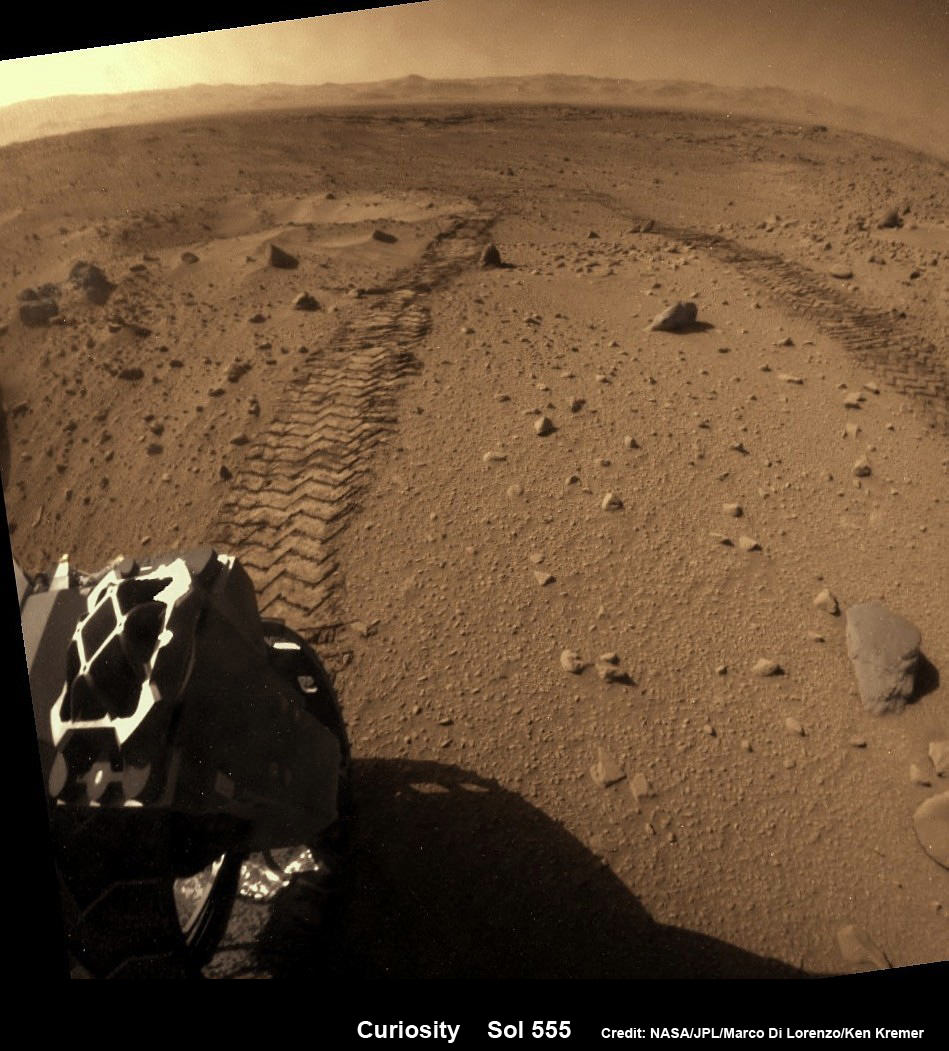
Curiosity looks back across dune field to her wheel tracks and a small crater she just missed. Flattened rear hazcam image, colorized from Sol 555 (Feb 27, 2014). Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
Scientists directed Curiosity to drive by the rock rows nicknamed “Junda” after their interest was piqued by orbital images taken by the powerful telescopic camera on NASA’s Mars Reconnaissance Orbiter (MRO) circling overhead.
The six wheeled rover paused during the planned Feb. 19 drive of 328 feet (100 meters) to capture the imagery.
She then pushed forward to finish the day’s drive and snapped another fabulous look back view – see our mosaic below.
And the next day on Feb. 20 (Sol 549), she also completed her second 100 meter drive in reverse.
Her handlers are occasionally commanding Curiosity to drive backwards in a newly tested bid to minimize serious damage to the six 20 inch diameter wheels in the form of rips and tears caused by rough edged Red Planet rocks – see our wheel mosaic below.
Curiosity looks back at Martian sand dunes and rover tracks after passing by Junda outcrop (right) on Sol 548 (Feb. 19, 2014) with Gale Crater rim and Mount Sharp on the distant horizon. Navcam colorized photomosaic. Credit: NASA/JPL-Caltech/Ken Kremer- kenkremer.com/Marco Di Lorenzo
Curiosity is well on the way to her next near term goal, which is a science waypoint, named Kimberly (formerly called KMS-9), which lies about half a mile ahead.
Kimberly is of interest to the science team because it sits at an the intersection of different rock layers and also features ground with striations like those at “Junda”.
Curiosity looks back eastward to ‘Dingo Gap’ sand dune inside Gale Crater. After crossing over the 3 foot (1 meter) tall dune on Sol 539, Feb. 9, 2014 the rover drove westward into the ‘Moonlight Valley’. The parallel rover wheel tracks are 9 feet (2.7 meters) apart. Assembled from Sol 539 colorized navcam raw images. Credit: NASA/JPL/ Ken Kremer- kenkremer.com/Marco Di Lorenzo
So, after the rover reaches Kimberly, researchers plan to temporarily halt driving for awhile to investigate the location and direct the robot to drill into another rock to collect samples for analysis by the two state- of-the -art chemistry labs.
If drilling is warranted, Kimberly would be the site of Curiosity’s first drilling operation since the Cumberland outcrop target was bored into during the spring of 2013 at Yellowknife Bay.
Curiosity departed the Yellowknife Bay region in July 2013 where she discovered a habitable zone and thereby accomplished the primary goal of the mission.
To date Curiosity’s odometer stands at 5.3 kilometers and she has taken over 125,000 images.
The robot has somewhat less than another 5 km to go to reach the base of Mount Sharp.
She perhaps may arrive sometime in mid 2014.
Arrival time at Mount Sharp depends on driving speed and whether the upcoming terrain is smoother or strewn with sharp edged rocks that have hindered progress due to accumulating wear and tear on the aluminum wheels.
Up close photomosaic view shows lengthy tear in rover Curiosity’s left front wheel caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Jan. 31, 2014 (Sol 529) were assembled to show some recent damage to several of its six wheels Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com See below complete 6 wheel mosaic and further wheel mosaics for comparison
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Chang’e-3, GPM, SpaceX, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF convention on April 12/13.
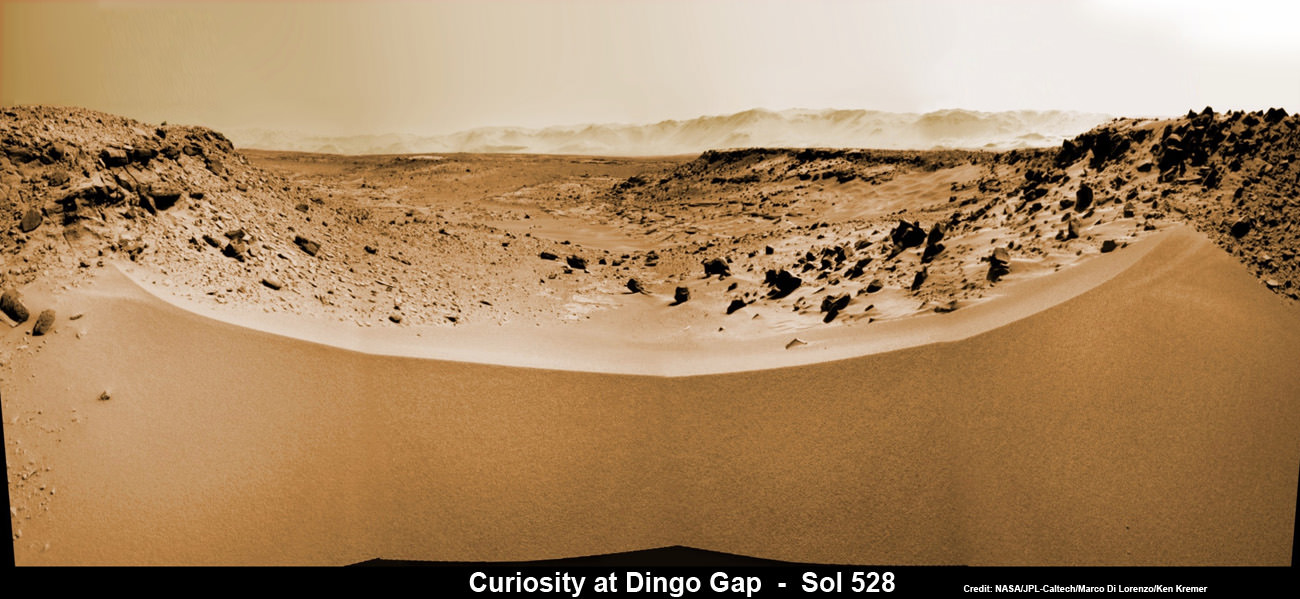
Curiosity’s View Past Tall Dune at edge of ‘Dingo Gap’
This photomosaic from Curiosity’s Navigation Camera (Navcam) taken at the edge of the entrance to the Dingo Gap shows a 3 foot (1 meter) tall dune and valley terrain beyond to the west, all dramatically back dropped by eroded rim of Gale Crater. View from the rover’s current position on Sol 528 (Jan. 30, 2014). The rover team may decide soon whether Curiosity will bridge the dune gap as a smoother path to next science destination. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer- kenkremer.com