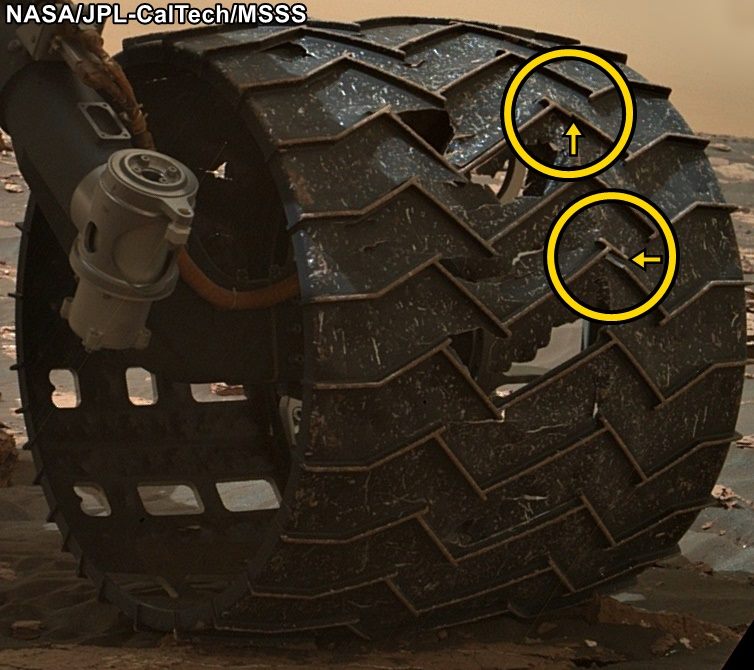
Image taken by the Mars Hand Lens Imager (MAHLI) of Curiosity's wheels on March 19, 2017. Credit: NASA
Since it landed on August 6th, 2012, the Curiosityrover has spent a total of 1644 Sols (or 1689 Earth days) on Mars. And as of March 2017, it has traveled almost 16 km (~10 mi) across the planet and climbed almost a fifth of a kilometer (0.124 mi) uphill. Spending that kind of time on another planet, and traveling that kind of distance, can certainly lead to its share of wear of tear on a vehicle.
That was the conclusion when the Curiosity science team conducted a routine check of the rover’s wheels on Sunday, March 19th, 2017. After examining images taken by the Mars Hand Lens Imager (MAHLI), they noticed two small breaks in the raised treads on the rover’s left middle wheel. These breaks appeared to have happened since late January, when the last routine check of the wheels took place.
To get around, the Curiosity rover relies on six solid aluminum wheels that are 40 cm (16 in) wide. The skin of the wheels is thinner than a US dime, but each contains 19 zigzag-shaped treads that are about 0.75 cm (three-quarters of an inch) thick. These “grousers”, as they are called, bear most of the rover’s weight and provide most of the wheel’s traction.
Close-up image of the broken grousers on Curiosity’s left-middle wheel. Credit: NASA/JPL-Caltech/MSSS
Ever since the rover was forced to cross a stretch of terrain that was studded with sharp rocks in 2013, the Curiosity team has made regular checks on the rover’s wheels using the MAHLI camera. At the time, the rover was moving from the Bradbury Landing site (where it landed in 2012) to the base of Mount Sharp, and traversing this terrain caused holes and dents in the wheels to grow significantly.
However, members of Curiosity’s science team emphasized that this is nothing to be worried about, as it will not affect the rover’s performance or lifespan. As Jim Erickson, the Curiosity Project Manager at NASA’s Jet Propulsion Laboratory, said in a recent NASA press statement:
“All six wheels have more than enough working lifespan remaining to get the vehicle to all destinations planned for the mission. While not unexpected, this damage is the first sign that the left middle wheel is nearing a wheel-wear milestone.”
In addition to regular monitoring, a wheel-longevity testing program was started on Earth in 2013 using identical aluminum wheels. These tests showed that once a wheel got to the point where three of its grousers were broken, it had passed about 60% of its lifespan. However, Curiosity has already driven more than 60% of the total distance needed for it to make it to all of its scientific destinations.
Graphic depicting aspects of the driving distance, elevation, geological units and time intervals of NASA’s Curiosity Mars rover mission, as of late 2016. Credit: NASA/JPL-Caltech
“This is an expected part of the life cycle of the wheels and at this point does not change our current science plans or diminish our chances of studying key transitions in mineralogy higher on Mount Sharp.”
At present, Curiosity is examining sand dunes in the geographical region known as the Murray Buttes formation, which is located on the slope of Mount Sharp. Once finished, it will proceed up higher to a feature known as “Vera Rubin Ridge”, inspecting a layer that is rich in the mineral hematite. From there, it will proceeded to even higher elevations to inspect layers that contain clays and sulfates.
Getting to the farthest destination (the sulfate unit) will require another 6 km (3.7 mi) of uphill driving. However, this is a short distance compared to the kind of driving the rover has already performed. Moreover, the science team has spent the past four years implementing various methods designed to avoid embedded rocks and other potentially hazardous terrain features.
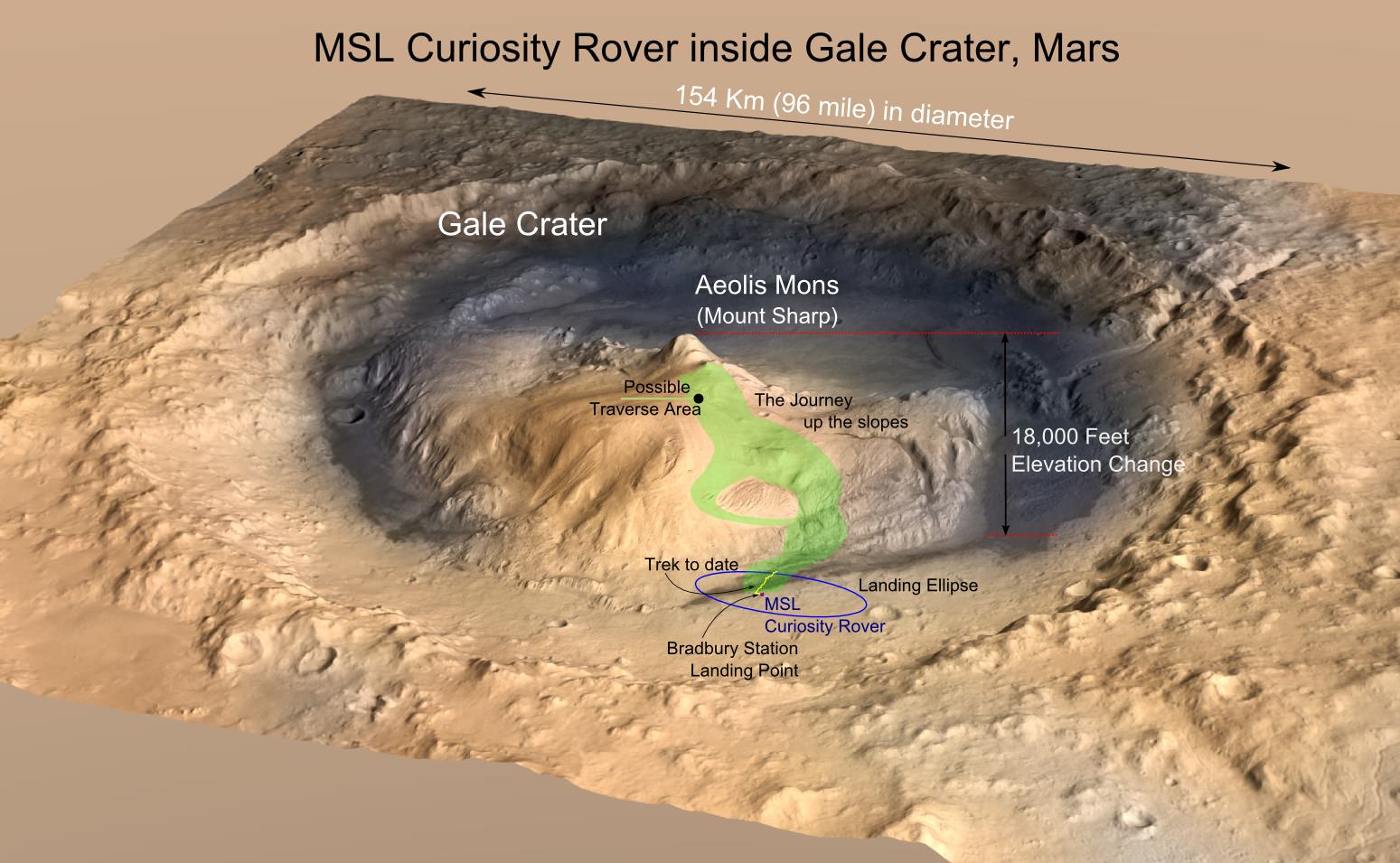
MRO image of Gale Crater illustrating the landing location and trek of the Rover Curiosity. Credits: NASA/JPL, illustration, T.Reyes
It is expected that this drive up Mount Sharp will yield some impressive scientific finds. During its first year on Mars, Curiosity succeeded in gathering evidence in the Gale Crater that showed how Mars once had conditions favorable to life. This included ample evidence of liquid water, all the chemical elements needed for life, and even a chemical source of energy.
By scaling Mount Sharp and examining the layers that were deposited over the course of billions of years, Curiosity is able to examine a living geological record of how the planet has evolved since then. Luckily, the rover’s wheels seem to have more than enough life to make these and (most likely) other scientific finds.
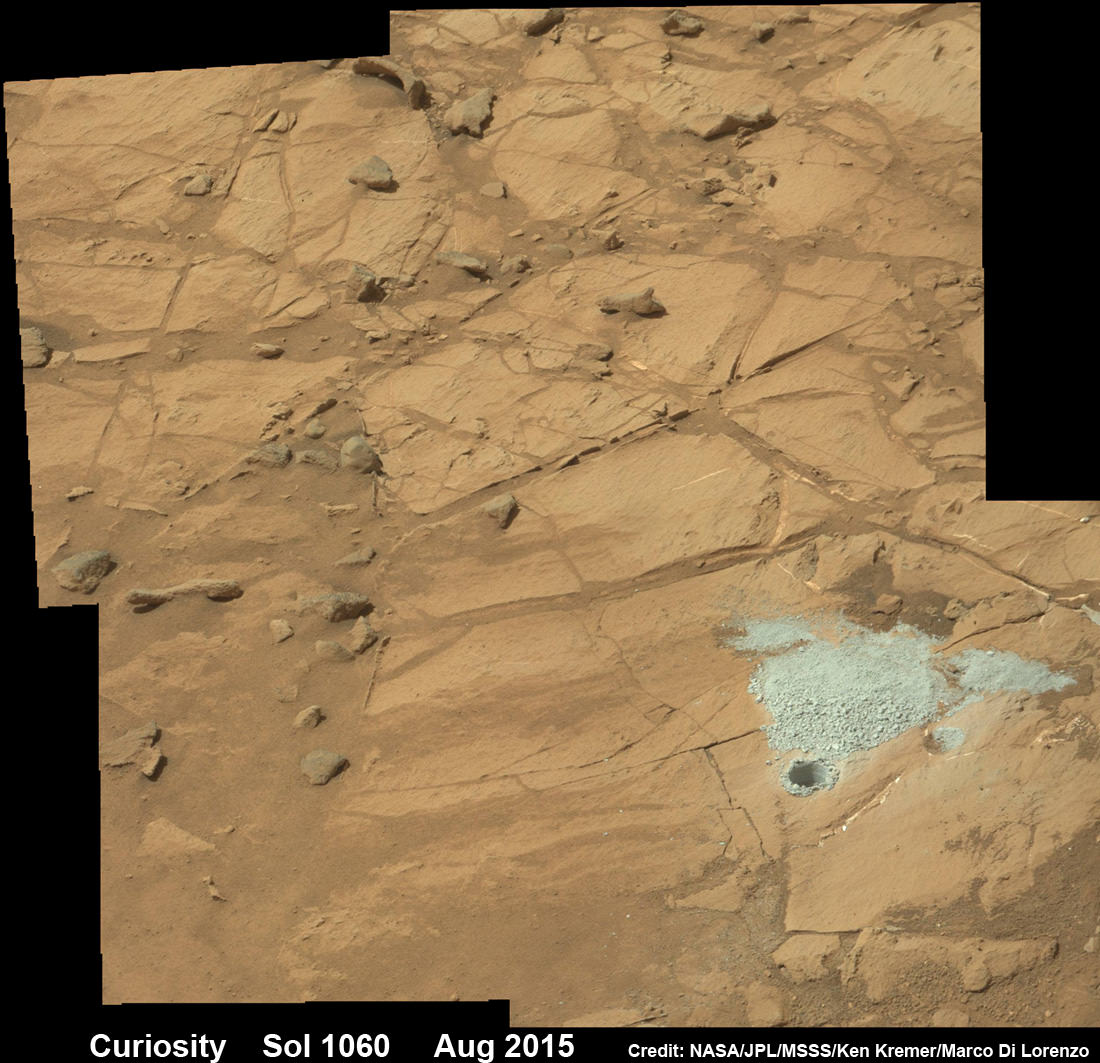
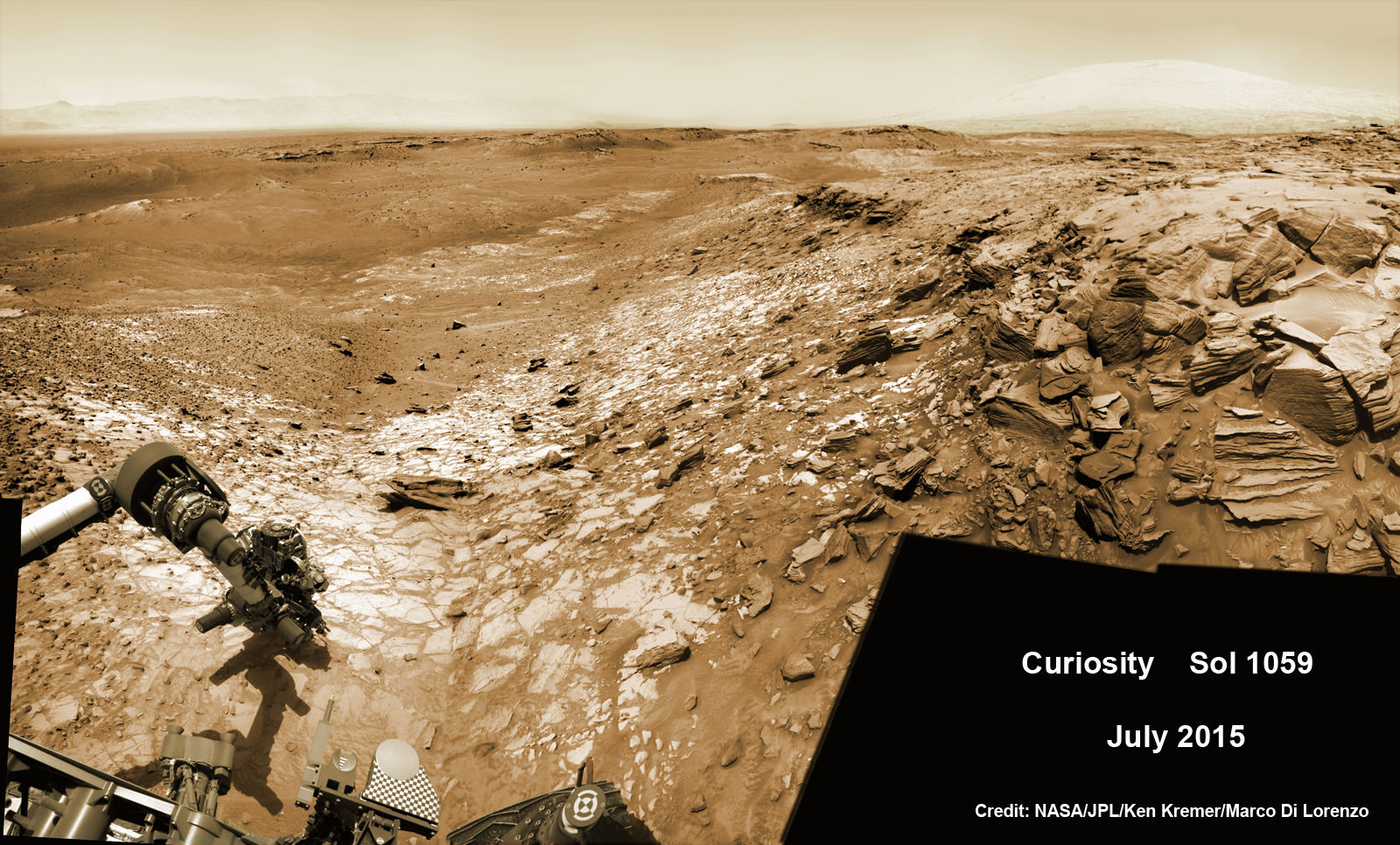
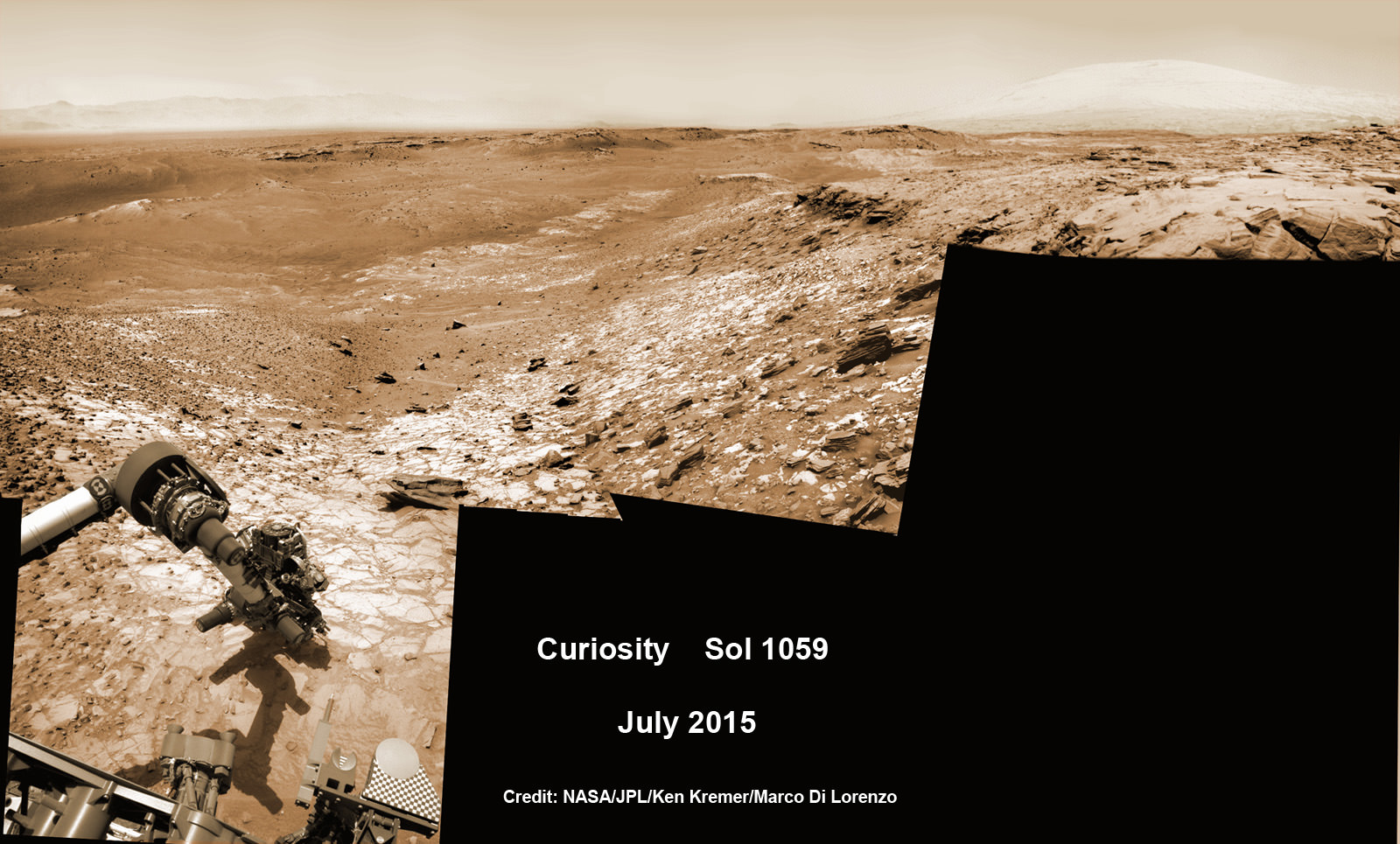
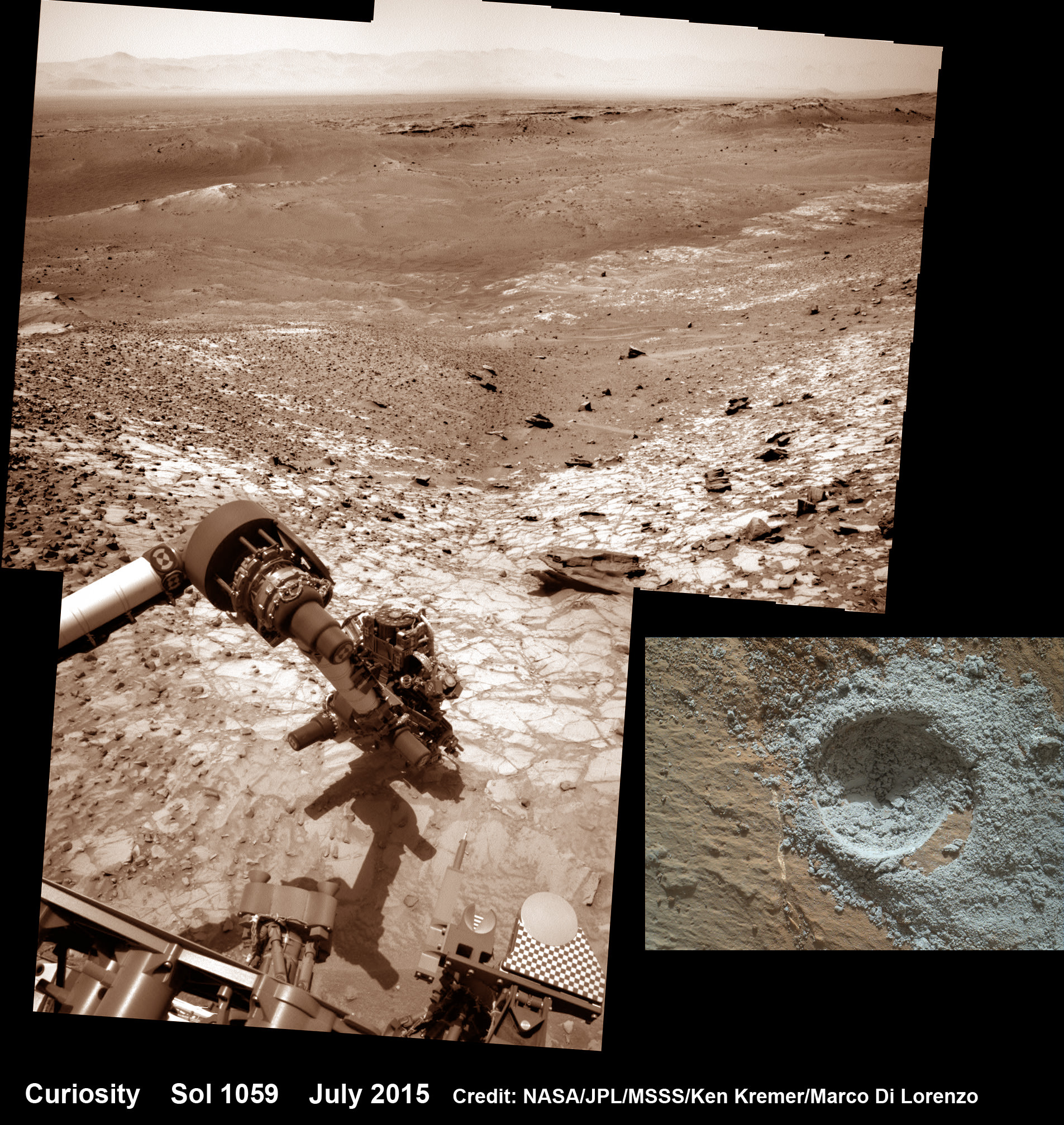
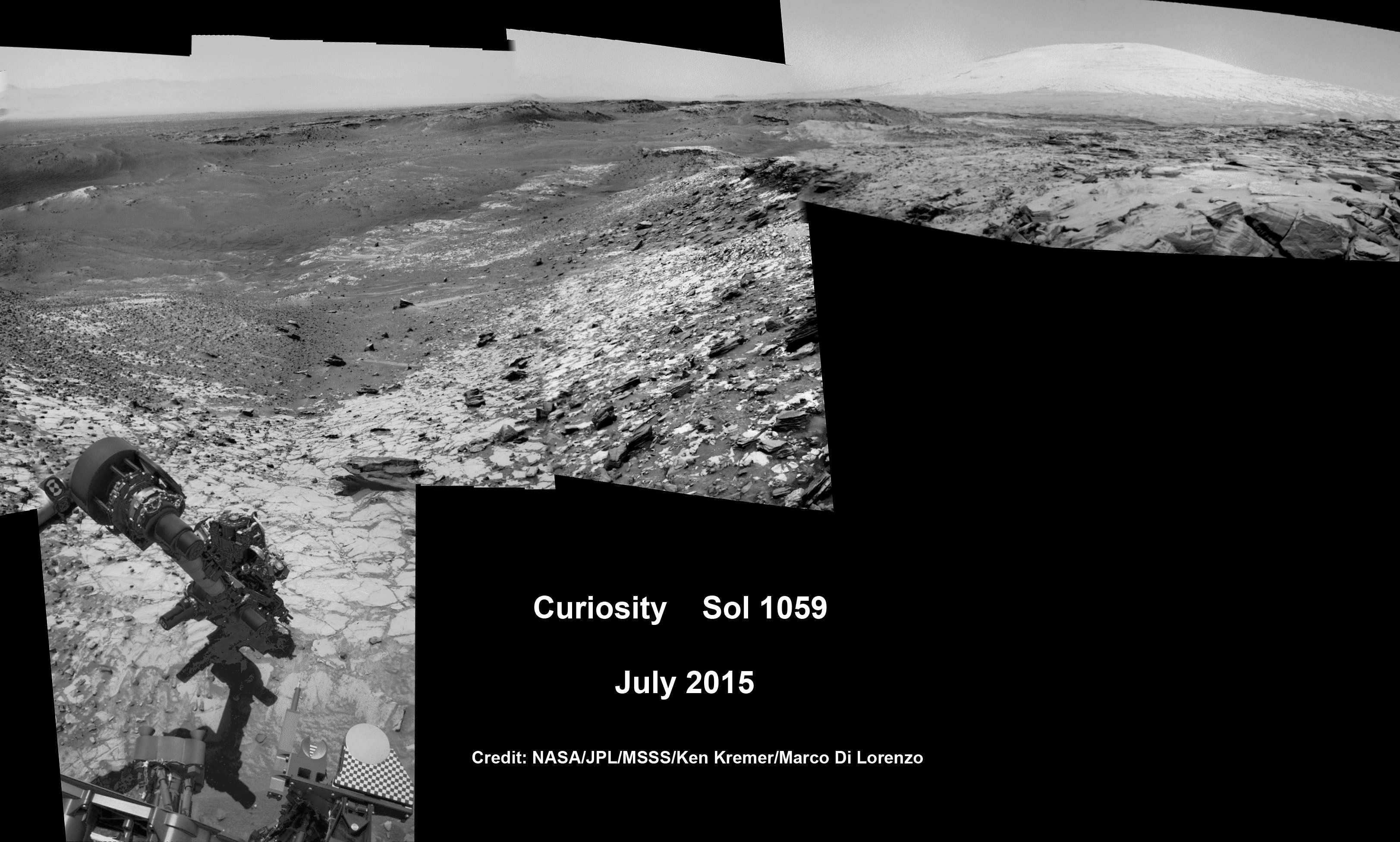
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right, during August 2015. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Story updated[/caption]
NASA’s Curiosity Mars Science Laboratory (MSL) rover has successfully drilled into the first high silica rock target on Mars after recently discovering this new type of rock that’s unlike any found before – as she is about to mark the 3rd anniversary since the hair-raising touchdown on the Red Planet.
The SUV-sized rover bored a full depth hole into a Mars outcrop at a target dubbed “Buckskin” as commanded by the mission team over the weekend, after first conducting a mini drill test to assess the safety of the intended drill campaign to sample the alien rock interior beneath the Martian crater floor.
“This morning, the MSL operations team was very happy to see that drilling into Buckskin was successful!” said Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
Confirmation of the success of the full depth drilling into “Buckskin” on Sol 1060 at the bright toned “Lion” outcrop came later after receipt of new high resolution images from the rover showing the approximately 1.6 cm (0.63 inch) diameter bore hole next to the initial mini hole test, along with the indicative residue of grey colored tailings from the Martian subsurface seen distributed around the new hole.
“Successful drilling at Buckskin!” added team member Professor John Bridges of the University of Leicester, England, in an update.
“Like the other drill holes this is showing how thin red Mars is,” Bridges elaborated.
Beneath a thin veneer of rusty red colored iron oxide, the Red Planet is remarkably grey as demonstrated by Curiosity’s prior drilling campaigns.
The hole was bored to a full depth of about 2.6 inches (6.5 centimeters) using the percussion drill on the terminus of the 7 foot-long (2.1 meter-long) robotic arm.
Curiosity rover successfully drills into Martian outcrop at Buckskin rock target at current work site at base of Mount Sharp in August 2015, in this mosaic showing full depth drill hole and initial test hole, with grey colored subsurface tailings and mineral veins on surrounding Red Planet terrain. This high resolution photo mosaic is a multisol composite of color images taken by the mast mounted Mastcam-100 color camera up to Sol 1060, July 31, 2015. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Buckskin was “chosen because this sedimentary horizon has some very high silica enrichments,” Bridges explains.
The findings of elevated levels of silicon as well as hydrogen were derived from data collected by Curiosity’s laser-firing Chemistry & Camera (ChemCam) and Dynamic Albedo of Neutrons (DAN) instruments on certain local area rocks.
Silica is a rock-forming compound containing silicon and oxygen, commonly found on Earth as quartz.
“High levels of silica could indicate ideal conditions for preserving ancient organic material, if present, so the science team wants to take a closer look,” say mission team officials.
See the rover at work reaching out with her robotic arm and drilling into Buckskin, as illustrated in our new mosaics of mastcam and navcam camera raw images created by the image processing team of Ken Kremer and Marco Di Lorenzo (above and below).
“Buckskin” sits at the base of Mount Sharp, a huge layered mountain that dominates the center of the 96 mile-wide (154 kilometers-wide) Gale Crater landing site.
Exploring the sedimentary layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
The silica enrichment “may have occurred as the Gale sediments were altered by subsurface fluids after burial. As the basaltic composition was altered (as we saw from the clay and Fe oxide at Yellowknife Bay) ultimately a lot of silica is released which can be precipitated at horizons like this,” explains Bridges.
The Curiosity Mars Science Laboratory (MSL) rover safely touched down on the crater floor on August 5, 2012 following the unprecedented and nail-biting sky crane maneuver that delivered her with pinpoint precision to a landing site nearby Mount Sharp inside Gale Crater.
The goal of the drilling is to provide geologic context for Curiosity’s long term climb up the mountains sedimentary layers by collecting samples to assess the habitability of the Red Planet over billions of years of time.
So the plan was for the robot to process and pulverize the samples for eventual delivery to the onboard pair of miniaturized chemistry labs located inside her belly – SAM and CheMin. Tiny samples are fed to a trio of inlet ports on the rover deck through the sieved filters.
Images are taken to document and assess the entire sample collection and delivery process.
After gathering the Buckskin sample, a portion was transferred to the robots scoop for inspection.
Then the first portion was successfully fed into CheMin for inorganic elemental analysis over the weekend.
“The activities planned for last weekend completed successfully, including sample dropoff to CheMin and analysis of the minerals present,” Herkenhoff confirmed.
The one ton robots next steps involve “dumping the portion of the drill sample that has not been sieved and Mastcam, ChemCam, MAHLI, and APXS observations of the dump pile. ChemCam and Mastcam will also observe nearby targets “Martz” and “Mountain Home.” MAHLI will image the drill hole, tailings and CheMin inlet at night using its LEDs for illumination.”
Curiosity MAHLI camera image taken of Buckskin drill hole on Sol 1060 on July 31, 2015. Credit: NASA/JPL/MSSS
After completing these science activities, the six wheeled rover will move on to the next exciting destination.
“It’s been a great couple of weeks at the Lion outcrop, but it’s time to move on,” says Lauren Edgar, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in the latest mission update from today, August 4, Sol 1065.
“After a successful investigation that included observations by almost every science instrument, we’re getting ready to drive away tomorrow. That means that today (and tomorrow before we drive) is the last call for science observations.”
For about the past two months, the six wheeled robot has been driving around and exploring a geological contact zone named “Marias Pass” – an area on lower Mount Sharp, by examining the rocks and outcrops with her suite of state-of-the-art science instruments.
“Marias Pass” is a geological context zone where two rock types overlap – pale mudstone meets darker sandstone.
The prior hole was drilled at Telegraph Peak on Feb. 24, 2015, on Sol 908.
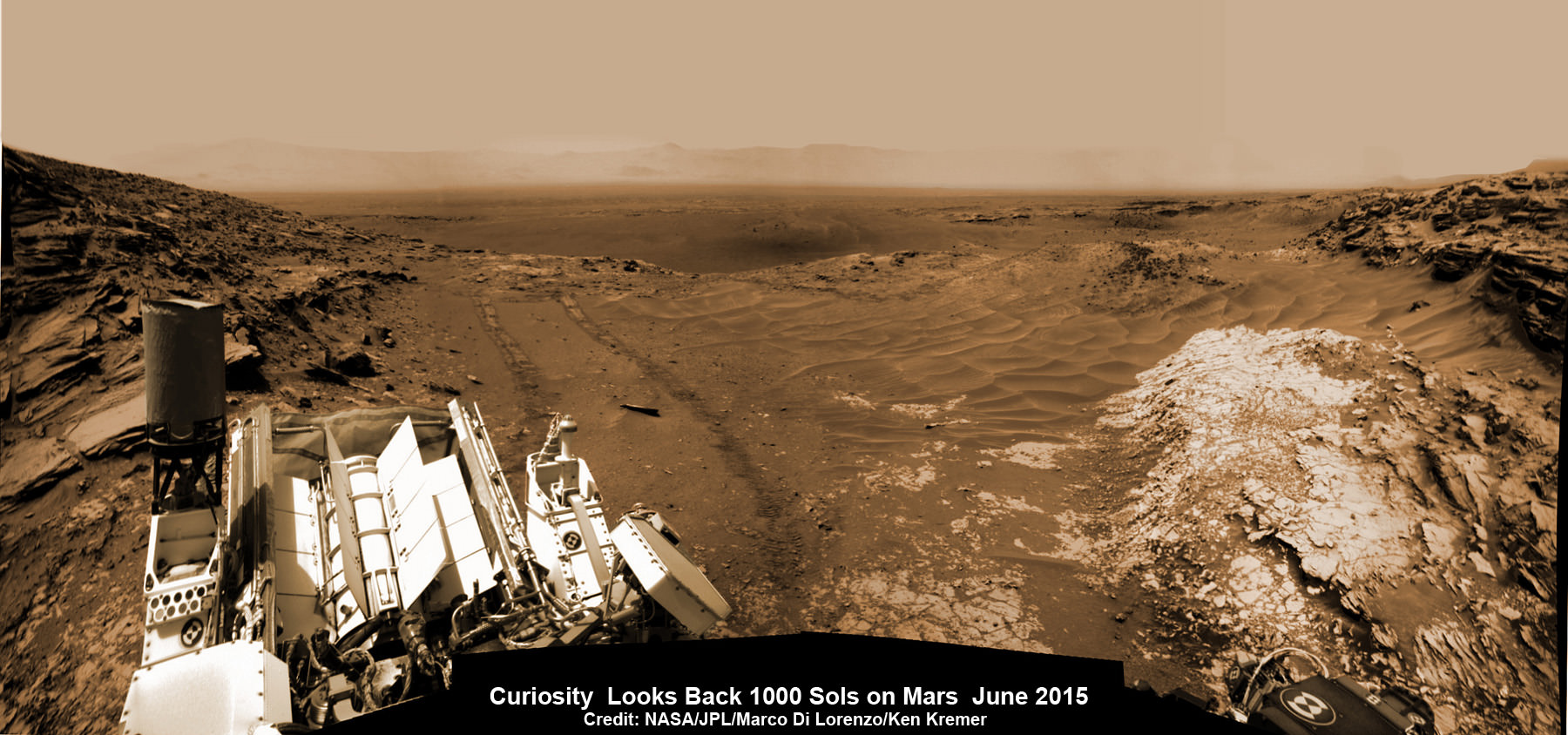
Curiosity recently celebrated 1000 Sols of exploration on Mars on May 31, 2015 – detailed here with our Sol 1000 mosaic also featured at Astronomy Picture of the Day on June 13, 2015.
NASA’s Martian Curiosity rover looks backs to 1000 Sols of science and exploration on the surface of the Red Planet. Robot wheel tracks lead back through valley dunes. Gale Crater rim seen in the distant hazy background. Sol 997 (May 28, 2015) navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/ Marco Di Lorenzo/Ken Kremer/kenkremer.com Featured on APOD on June 13, 2015
As of today, Sol 1065, August 4, 2015, she has driven some 11 kilometers and taken over 256,000 amazing images.
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Curiosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
On the eve of the 3rd anniversary since her nail biting touchdown inside Gale Crater, NASA’s car sized Curiosity Mars Science Laboratory (MSL) rover has discovered a new type of Martian rock that’s surprisingly rich in silica – and unlike any other targets found before.
Excited by this new science finding on Mars, Curiosity’s handlers are now gearing the robot up for her next full drill campaign today, July 31 (Sol 1060) into a rock target called “Buckskin” – which lies at the base of Mount Sharp, the huge layered mountain that is the primary science target of this Mars rover mission.
“The team selected the “Buckskin” target to drill,” says Lauren Edgar, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
See the rover at work reaching out with her robotic arm and drilling into Buckskin, as illustrated in our new mosaics of navcam camera images created by the image processing team of Ken Kremer and Marco Di Lorenzo (above and below). Also featured at Alive Universe Images – here.
NASA Curiosity rover inspects ‘Buckskin’ rock outcrop on Mars with APXS mineral spectrometer in this hazcam camera raw image taken on July 29, 2015 (Sol 1058), colorized and linearized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer/kenkremer.com
For about the past two months, the six wheeled robot has been driving around and exploring a geological contact zone named “Marias Pass” – an area on lower Mount Sharp, by examining the rocks and outcrops with her suite of state-of-the-art science instruments.
The goal is to provide geologic context for her long term expedition up the mountains sedimentary layers to study the habitability of the Red Planet over eons of time.
Data from Curiosity’s “laser-firing Chemistry & Camera (ChemCam) and Dynamic Albedo of Neutrons (DAN), show elevated amounts of silicon and hydrogen, respectively,” in certain local area rocks, according to the team.
Silica is a rock-forming compound containing silicon and oxygen, commonly found on Earth as quartz.
“High levels of silica could indicate ideal conditions for preserving ancient organic material, if present, so the science team wants to take a closer look.”
Curiosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars. Gale crater rim seen in the distant background, in this composite mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Inset: MAHLI camera up close image of test drill at “Buckskin” rock target. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo Credit: NASA/JPL-Caltech/MSSS
Therefore the team scouted targets suitable for in depth analysis and sample drilling and chose “Buckskin”.
“Buckskin” is located among some high-silica and hydrogen enriched targets at a bright outcrop named “Lion.”
An initial test bore operation was conducted first to confirm whether that it was indeed safe to drill into “Buckskin” and cause no harm to the rover before committing to the entire operation.
The bore hole is about 1.6 cm (0.63 inch) in diameter.
“This test will drill a small hole in the rock to help determine whether it is safe to go ahead with the full hole,” elaborated Ryan Anderson, planetary scientist at the USGS Astrogeology Science Center and an MSL science team member.
So it was only after the team received back new high resolution imagery last night from the arm-mounted MAHLI camera which confirmed the success of the mini-drill operation, that the “GO” was given for a full depth drill campaign. MAHLI is short for Mars Hand Lens Imager.
“We successfully completed a mini drilling test yesterday (shown in the MAHLI image). That means that today we’re going for the FULL drill hole” Edgar confirmed.
“GO for Drilling.”
So it’s a busy day ahead on the Red Planet, including lots of imaging along the way to document and confirm that the drilling operation proceeds safely and as planned.
“First we’ll acquire MAHLI images of the intended drill site, then we’ll drill, and then we’ll acquire more MAHLI images after drilling,” Edgar explains.
“The plan also includes Navcam imaging of the workspace, and Mastcam imaging of the target and drill bit. In addition to drilling, we’re getting CheMin ready to receive sample in an upcoming plan. Fingers crossed!” Surface observations with the arm-mounted Alpha Particle X-ray Spectrometer (APXS) instrument are also planned.
If all goes well, the robot will process and pulverize the samples for eventual delivery to the onboard pair of miniaturized chemistry labs located inside her belly – SAM and CheMin. Tiny samples will be fed to the inlet ports on the rover deck through the sieved filters.
A rock outcrop dubbed “Missoula,” near Marias Pass on Mars, is seen in this image mosaic taken by the Mars Hand Lens Imager on NASA’s Curiosity rover. Pale mudstone (bottom of outcrop) meets coarser sandstone (top) in this geological contact zone, which has piqued the interest of Mars scientists. Credit: NASA/JPL-Caltech/MSSS
Meanwhile the team is studying a nearby rock outcrop called “Ch-paa-qn” which means “shining peak” in the native Salish language of northern Montana.”
Anderson says the target is a bright patch on a nearby outcrop. Via active and passive observations with the mast-mounted ChemCam laser and Mastcam multispectral imager, the purpose is to determine if “Ch-paa-qn” is comprised of calcium sulfate like other white veins visible nearby, or perhaps it’s something else entirely.
A rock fragment dubbed “Lamoose” is shown in this picture taken by the Mars Hand Lens Imager (MAHLI) on NASA’s Curiosity rover. Like other nearby rocks in a portion of the “Marias Pass” area of Mt. Sharp, Mars, it has unusually high concentrations of silica. The high silica was first detected in the area by the Chemistry & Camera (ChemCam) laser spectrometer. This rock was targeted for follow-up study by the MAHLI and the arm-mounted Alpha Particle X-ray Spectrometer (APXS). Credits: NASA/JPL-Caltech/MSSS
Before arriving by the “Lion” outcrop last week, Curiosity was investigating another outcrop area nearby, the high-silica target dubbed “Elk” with the ChemCam instrument, while scouting around the “Marias Pass” area in search of tasty science targets for in-depth analysis.
Sometimes the data subsequently returned and analyzed is so extraordinary, that the team decides on a return trip to a spot previously departed. Such was the case with “Elk” and the rover was commanded to do a U-turn to acquire more precious data.
“One never knows what to expect on Mars, but the Elk target was interesting enough to go back and investigate,” said Roger Wiens, the principal investigator of the ChemCam instrument from the Los Alamos National Laboratory in New Mexico.
Soon, ChemCam will have fired on its 1,000th target. Overall the laser blaster has been fired more than 260,000 times since Curiosity landed inside the nearly 100 mile wide Gale Crater on Mars on Aug. 6, 2012, alongside Mount Sharp.
“ChemCam acts like eyes and ears of the rover for nearby objects,” said Wiens.
“Marias Pass” is a geological context zone where two rock types overlap – pale mudstone meets darker sandstone.
The rover spotted a very curious outcrop named “Missoula.”
“We found an outcrop named Missoula where the two rock types came together, but it was quite small and close to the ground. We used the robotic arm to capture a dog’s-eye view with the MAHLI camera, getting our nose right in there,” said Ashwin Vasavada, the mission’s project scientist at NASA’s Jet Propulsion Laboratory in Pasadena, California.
White mineral veins, possibly comprised of calcium sulfate, filled the fractures by depositing the mineral from running groundwater.
“Such clues help scientists understand the possible timing of geological events,” says the team.
Read more about Curiosity in an Italian language version of this story at Alive Universe Images – here.
NASA’s Martian Curiosity rover looks backs to 1000 Sols of science and exploration on the surface of the Red Planet. Robot wheel tracks lead back through valley dunes. Gale Crater rim seen in the distant hazy background. Sol 997 (May 28, 2015) navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/ Marco Di Lorenzo/Ken Kremer/kenkremer.com Featured on APOD on June 13, 2015
As of today, Sol 1060, July 31, 2015, she has taken over 255,000 amazing images.
Red Mars, Gray Mars: “Mini-start hole” drill maneuver was successful. Image of mini start drill hole taken by Mars Hand Lens Imager (MAHLI) aboard NASA’s Mars rover Curiosity on July 30, 2015, Sol 1059. Credit: NASA/JPL-Caltech/MSSSCuriosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars, seen at right. Gale crater rim seen in the distant background at left, in this composite mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
A 1909 penny being carried by the Mars Curiosity rover is caked with dust on Oct. 2, 2013, after 14 months on Mars. Credit: NASA/JPL-Caltech/MSSS/Planetary Science Institute
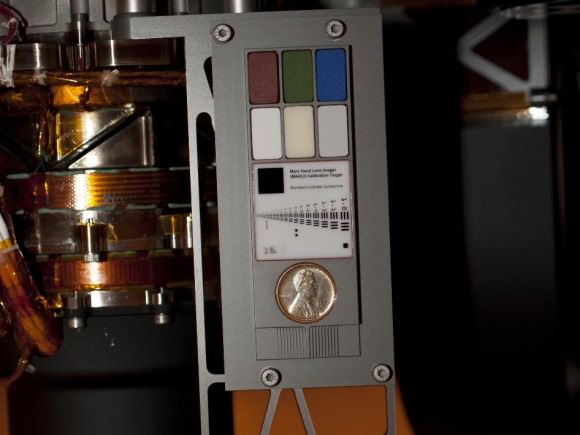
A high-power camera on the Mars Curiosity rover snapped a picture of a 1909 American penny featuring Abraham Lincoln. The coin is used as a calibration target for the Mars Hand Lens Imager (MAHLI) that is at the end of Curiosity’s robotic arm. In just over an Earth year on the Red Planet, you can see the bright copper is muted by lots of Mars dust.
Although the image has public relations appeal, there are scientific reasons behind picking that particular calibration target. It is supposed to measure how well the camera is performing, which is important as it zooms in on interesting features on Mars.
“The image shows that, during the penny’s 14 months (so far) on Mars, it has accumulated Martian dust and clumps of dust, despite its vertical mounting position,” the Planetary Science Institute stated.
Curiosity’s calibration target, shown before launch. Two instruments at the end of the robotic arm on NASA’s Mars rover Curiosity use the calibration targets attached to a shoulder joint of the arm. Credit: NASA/JPL-Caltech
“At 14 micrometers per pixel, this is the highest resolution image that the MAHLI can acquire,” the statement added.
“This image was obtained as part of a test; it was the first time that the rover’s robotic arm placed the MAHLI close enough to a target to obtain MAHLI’s highest-possible resolution. The previous highest-resolution MAHLI images, which were pictures of Martian rocks, were at 16-17 micrometers per pixel. A micrometer, also known as a micron, is about 0.000039 inches.”
Plaque on the exterior of Mars Science Laboratory, aka “Curiosity” (NASA/JPL-Caltech/MSSS)
Curiosity drops a few rather big names in recent images taken with its MAHLI (Mars Hand Lens Imager) camera: here we see a plaque affixed to its surface bearing the names and signatures of U.S. President Barack Obama, Vice President Joe Biden, Office of Science and Technology Director John Holdren, NASA Administrator Charles Bolden and other key figures responsible for making the Mars Exploration Program possible.
You never know… even on another planet it can’t hurt to have friends in high places!
The image was captured by MAHLI on September 19, the 44th sol of the MSL mission. (See the original raw downlink here.)
The rectangular plaque is made of anodized aluminum, measuring 3.94 inches (100 mm) high by 3.23 inches (82 mm) wide. It’s attached to the front left side of Curiosity’s deck with four bolts. (Explore Curiosity in 3D here.)
Dust, pebbles and variously-sized bits of Mars can be seen scattered around the plaque and deck, leftover detritus from the rover’s landing.
The complete list of signatures is:
Barack Obama, President, United States of America
Joe Biden, Vice President
John P. Holdren, Director, Office of Science and Technology Policy
Charles F. Bolden, Jr., Administrator, National Aeronautics and Space Administration
Edward J. Weiler, Associate Administrator, Science Mission Directorate (2008–2011)
James Green, Director, Planetary Sciences Division
Doug McCuistion, Director, Mars Exploration Program
Michael Meyer, Program Scientist, Mars Exploration Program
David Lavery, Program Executive, Mars Science Laboratory
In another image taken on the same sol, Curiosity shows some national pride with a circular medallion decorated with the stars and stripes of the American flag. The 68-mm-wide circular aluminum plate is affixed to one of the rover’s rocker arms. It’s just one of its four “mobility logos” — the others having the NASA logo, the JPL logo and the Curiosity mission logo.
Curiosity’s “stars and stripes” American flag mobility logo (NASA/JPL-Caltech/MSSS)
The main purpose of Curiosity’s MAHLI camera is to acquire close-up, high-resolution views of rocks and soil at the rover’s Gale Crater field site. Developed for NASA by Malin Space Science Systems in San Diego, CA, the camera is capable of focusing on any target at distances of about 0.8 inch (2.1 centimeters) to infinity, providing versatility for other uses, such as views of the rover itself from different angles.
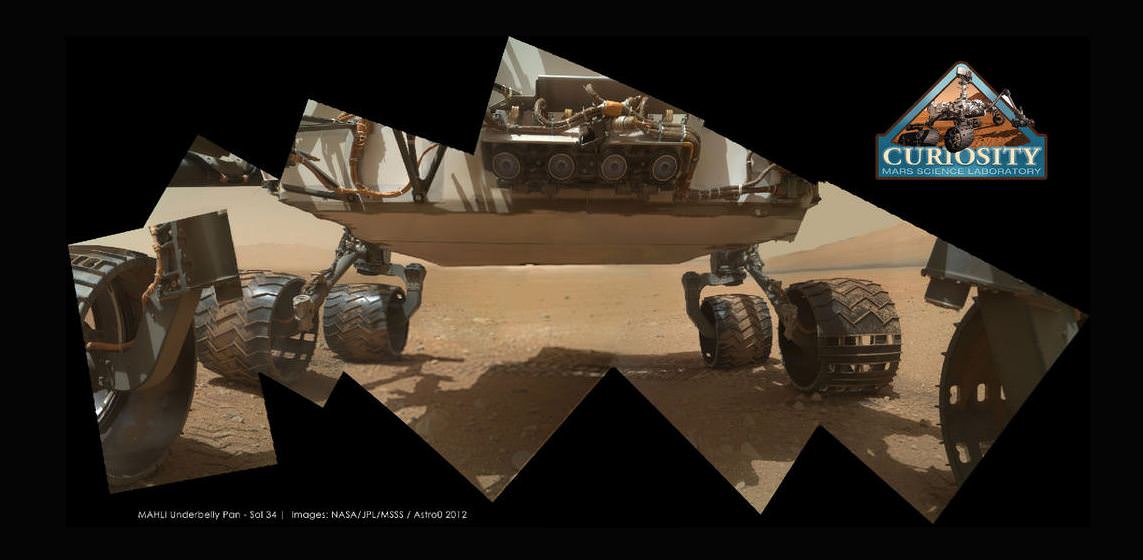
Curiosity’s underside as imaged by the MAHLI camera. Credit: NASA/JPL/MSSS; image editing by Astro0.
One of Curiosity’s amazing color cameras, the Mars Hand Lens Imager (MAHLI) that is mounted on the turret at the end of the MSL robotic arm, is now officially in action, with its dust cover removed over the weekend. The first picture it sent back to Earth was of the soil in its field of view (see below). That’s great, as the camera’s purpose is to acquire close-up images of materials on the Martian surface—rocks, fine particles and even frost. But then engineers commanded the camera to take a look at Curiosity’s underbelly – the rover’s ‘tummy’ so to speak. And the views are awesome, especially when some of the image wizards at UnmannedSpaceflight stitched a few of the images together to put together a mosaic of the entire view of the rover’s underside. This image was put together by Astro0 at UMSF. Click the image to see a larger version on his website.
The first image to come from Curiosity’s Mars Hand Lens Imager (MAHLI) with the dust cap off. Credit: NASA/MSL-Caltech
MAHLI, built by Malin Space Science Systems (MSSS) will be used to help characterize the geology of the site investigated by MSL, and it will be used to document the materials being examined by MSL’s geochemical and mineralogical experiments.
The Mars Hand Lens Imager (MAHLI) camera head. The knife is 88.9 mm (3.5 inches) long. Image credit: Malin Space Science Systems
MAHLI is the equivalent of a 2 Megapixel camera. Because MAHLI can focus at infinity, in addition to being able to get microscopic views of surface materials MAHLI can also be used for other purposes, including inspection of areas on the rover or imaging the local landscape — as the images here attest.
MAHLI can also acquire multiple images of the same feature at different focus positions; additionally look upcoming for 3-D views of selected targets from this camera, since it is located on the robotic arm, it will be relatively easy to move the camera to take two images of the same object from different positions.
LED-lit image from Mars Science Laboratory inside its shell (NASA/JPL-Caltech/Malin Space Science Systems)
[/caption]
Take a look around Curiosity’s cozy cabin! Ok, there’s really not much to see (she didn’t get a window seat) but when the image above was taken by the rover’s Mars Hand Lens Imager (MAHLI) camera on April 20, the spacecraft she’s tucked into was just over 120 million km (74 million miles) from Earth, en route to Mars. In other words, just past those blurry components and outside that dark shell is realouter space… that’s cool!
This color image was planned by the MSL team, used to confirm that MAHLI is operating as it should. The two green dots are reflections of the camera’s LED lights, and the rusty-orange out-of-focus parts are cables. The silver thing is a bracket holding said cables.
So why is this fancy camera taking blurry pictures (and the folks at NASA are happy about it?) Since MAHLI is designed to take both close-up images of rocks on Mars as well as landscape shots, it has a focusing motor. But when it’s not in use — such as during its current 11-month-long cruise to Mars — the motor puts the focusing lens into a safe position to protect it from damage during launch, entry and landing.
Positioned this way, MAHLI can only focus on objects 2 cm (less than an inch) away from its lens, and there simply aren’t any inside the capsule.
Of course, once Curiosity arrives at Mars and completes her exciting landing at Gale Crater, MAHLI will have plenty of things to take pictures of! Until then we’ll be patient, it can take a rest and we can rest assured that it’s working just fine.
Keep up with the latest news from the Mars Science Laboratory team here.
Labeled parts of the MSL rover (NASA/Kim Shiflett; cropping/annotation by Malin Space Science Systems)
San Diego-based Malin Space Science Systems (MSSS) built and operates the Mars Hand Lens Imager (MAHLI) aboard the Curiosity Mars rover. MSSS also built and operates the rover’s Mastcams and Mars Descent Imager. Read more about their contributions to Curiosity’s exploration mission here.