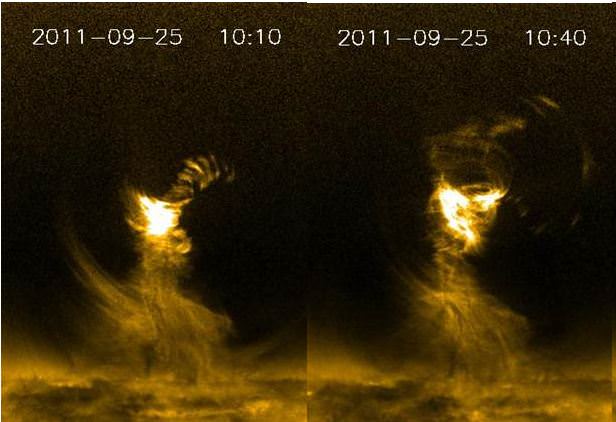
Spectacular rotation of material from solar prominences and the coronal cavities on September 25, 2011. Credit: NASA/Dr. Xing Li, Dr. Huw Morgan and Mr. Drew Leonard.
[/caption]
The Solar Dynamics Observatory captured images and video of a spectacular rotation of material from the Sun in a solar prominence. The whirling, dancing prominence created a massive tornado-like feature on the Sun, five times bigger than the Earth. “This is perhaps the first time that such a huge solar tornado is filmed by an imager,” said Dr. Xing Li of Aberystwyth University, presenting his team’s work at the National Astronomy Meeting this week in the UK. “The superb spatial and temporal resolution of SDO allows us to observe the solar atmosphere in great detail.”
The solar tornado was discovered using the Atmospheric Imaging Assembly (AIA) telescope on board SDO. On September 25, 2011, the AIA saw superheated gases as hot as 50,000 – 2,000,000 Kelvin sucked from the origin of a solar prominence, and spiral up into the high atmosphere. It traveled about 200,000 kilometers (124,000 miles) along the Sun for a period of at least three hours.
The hot gases in the tornadoes have speeds as high as 300,000 km per hour (186,000 mph) as opposed to terrestrial tornadoes, which can reach 150 km/h (90 mph).
Li and his team said that these tornadoes often occur at the root of huge coronal mass ejections. The solar tornadoes drag winding magnetic field and electric currents into the high atmosphere. It is possible that the magnetic field and currents play a key role in driving the coronal mass ejections.
A smaller solar tornado was captured in February of 2012:
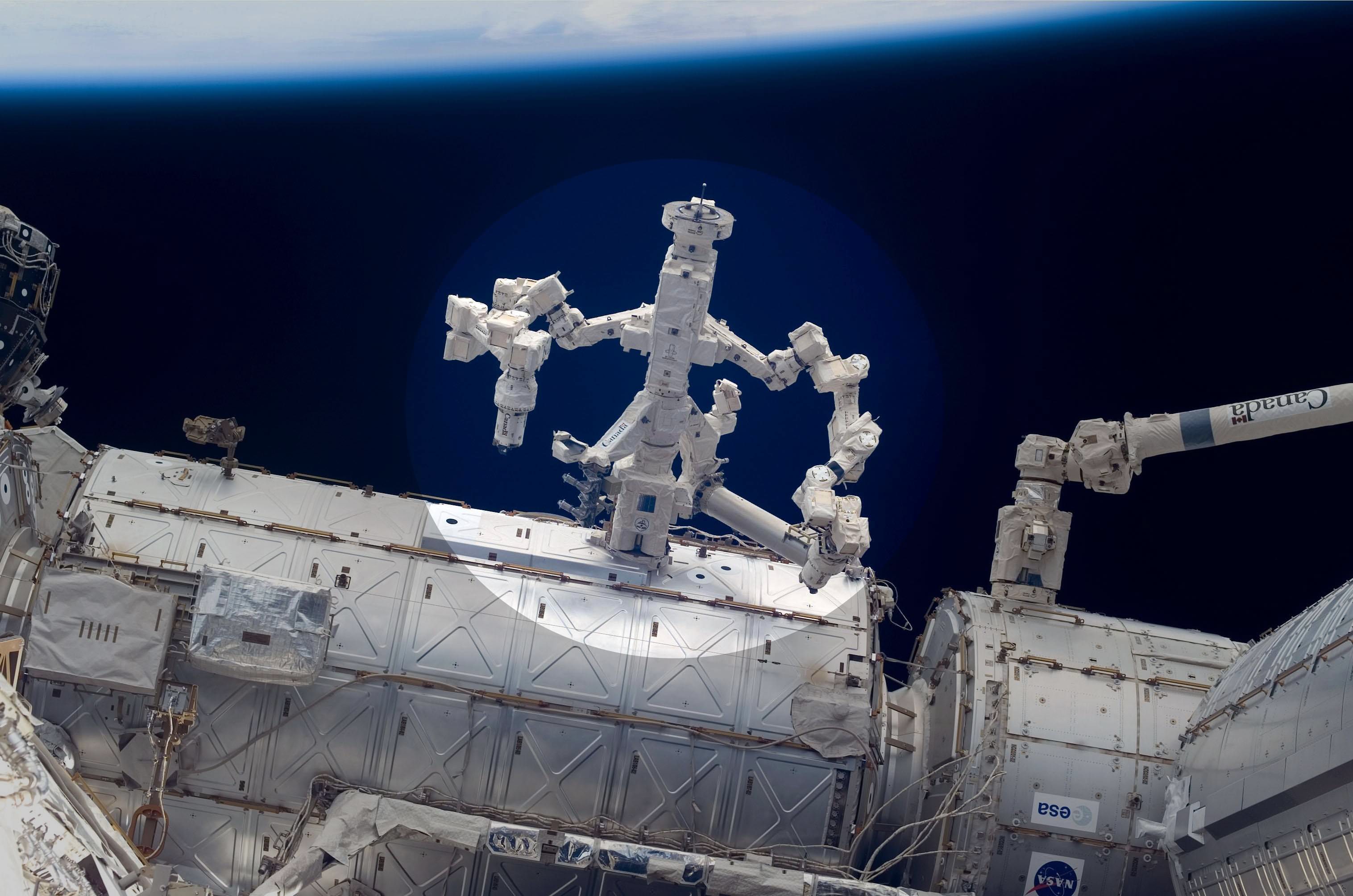
Canada’s Dextre robot (highlight) and NASA’s Robotic Refueling Experiment jointly performed groundbreaking robotics research aboard the ISS in March 2012. Dextre used its hands to grasp specialized work tools on the RRM for experiments to repair and refuel orbiting satellites. Credit: NASA
[/caption]
A combined team of American and Canadian engineers has taken a major first step forward by successfully applying new, first-of-its-kind robotics research conducted aboard the International Space Station (ISS) to the eventual repair and refueling of high value orbiting space satellites, and which has the potential to one day bring about billions of dollars in cost savings for the government and commercial space sectors.
Gleeful researchers from both nations shouted “Yeah !!!” – after successfully using the Robotic Refueling Mission (RRM) experiment – bolted outside the ISS- as a technology test bed to demonstrate that a remotely controlled robot in the vacuum of space could accomplish delicate work tasks requiring extremely precise motion control. The revolutionary robotics experiment could extend the usable operating life of satellites already in Earth orbit that were never even intended to be worked upon.
“After dedicating many months of professional and personal time to RRM, it was a great emotional rush and a reassurance for me to see the first video stream from an RRM tool,” said Justin Cassidy in an exclusive in-depth interview with Universe Today. Cassidy is RRM Hardware Manager at the NASA Goddard Spaceflight Center in Greenbelt, Maryland.
Astronuats Install Robotic Refueling Mission (RRM) experiment during Shuttle Era's Final Spacewalk
In March 2012, RRM and Canada’s Dextre Robot jointly acccomplised fundamental leap forward in robotics research aboard the ISS. Spacewalker Mike Fossum rides on the International Space Station's robotic arm as he carries the Robotic Refueling Mission experiment. This was the final scheduled spacewalk during a shuttle mission. Credit: NASA
And the RRM team already has plans to carry out even more ambitious follow on experiments starting as soon as this summer, including the highly anticipated transfer of fluids to simulate an actual satellite refueling that could transfigure robotics applications in space – see details below !
All of the robotic operations at the station were remotely controlled by flight controllers from the ground. The purpose of remote control and robotics is to free up the ISS human crew so they can work on other important activities and conduct science experiments requiring on-site human thought and intervention.
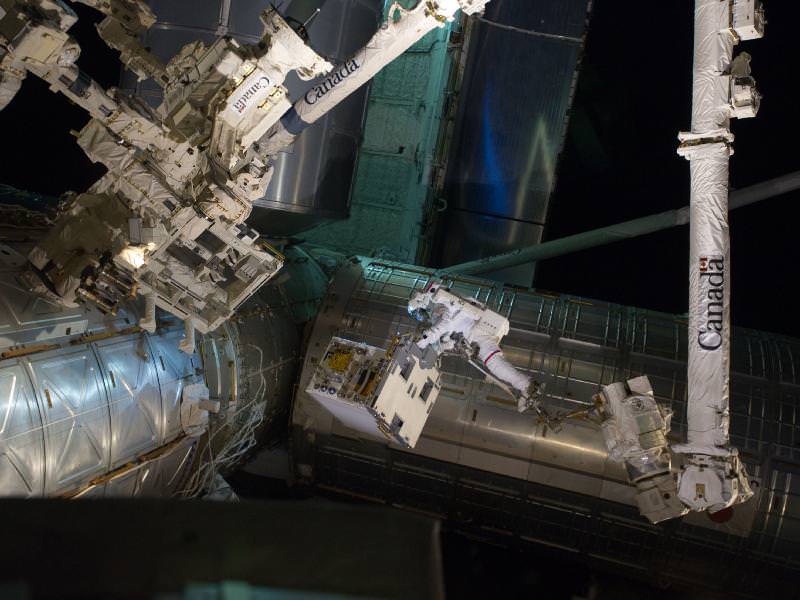
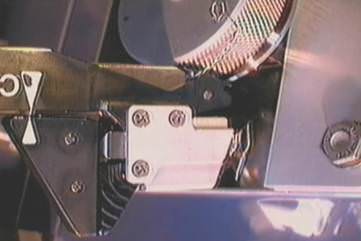
Dextre "hangs out" in space with two Robotic Refueling Mission (RRM) tools in its "hands." The RRM module is in the foreground. Credit: NASA
Over a three day period from March 7 to 9, engineers performed joint operations between NASA’s Robotic Refueling Mission (RRM) experiment and the Canadian Space Agency’s (CSA) robotic “handyman” – the Dextre robot. Dextre is officially dubbed the SPDM or Special Purpose Dexterous Manipulator.
On the first day, robotic operators on Earth remotely maneuvered the 12-foot (3.7 meter) long Dextre “handyman” to the RRM experiment using the space station’s Canadian built robotic arm (SSRMS).
Dextre’s “hand” – technically known as the “OTCM” – then grasped and inspected three different specialized satellite work tools housed inside the RRM unit . Comprehensive mechanical and electrical evaluations of the Safety Cap Tool, the Wire Cutter and Blanket Manipulation Tool, and the Multifunction Tool found that all three tools were functioning perfectly.
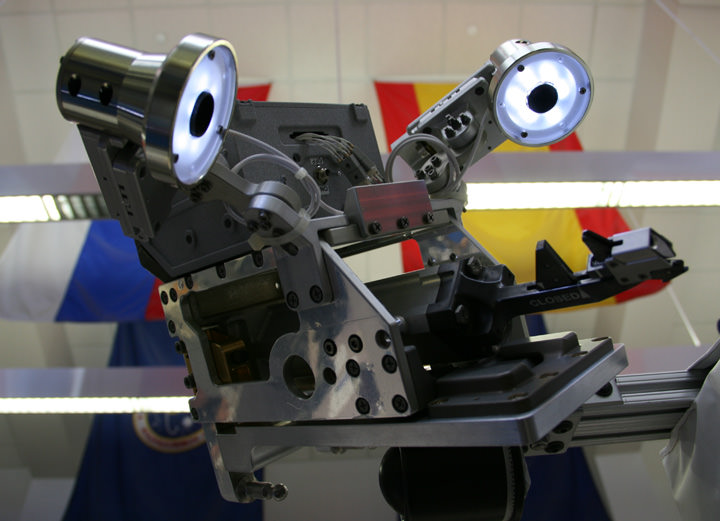
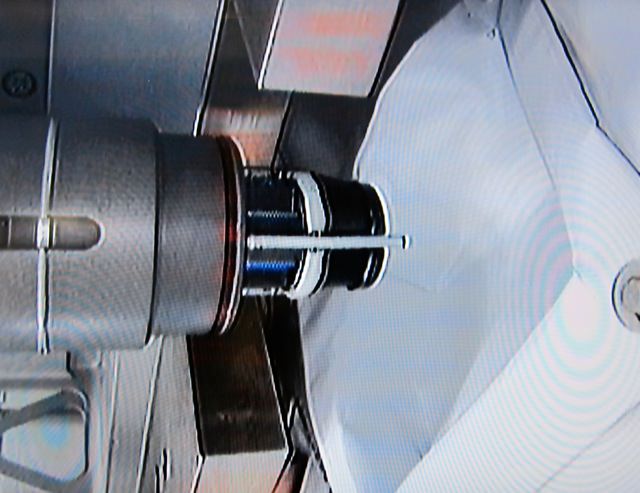
RRM Wire Cutter Tool (WCT) experiment is equipped with integral camera and LED lights -
on display at Kennedy Space Center Press Site. Dextre robot grasped the WCT with its hands and successfully snipped 2 ultra thin wires during the March 2012 RRM experiments. Credit: Ken Kremer
“Our teams mechanically latched the Canadian “Dextre” robot’s “hand” onto the RRM Safety Cap Tool (SCT). The RRM SCT is the first on orbit unit to use the video capability of the Dextre OTCM hand,” Cassidy explained.
“At the beginning of tool operations, mission controllers mechanically drove the OTCM’s electrical umbilical forward to mate it with the SCT’s integral electronics box. When the power was applied to that interface, our team was able to see that on Goddard’s large screen TVs – the SCT’s “first light” video showed a shot of the tool within the RRM stowage bay (see photo).
Shot of the Safety Cap Tool (SCT) tool within the RRM stowage bay. Credit NASA RRM
“Our team burst into a shout out of “Yeah!” to commend this successful electrical functional system checkout.”
Dextre then carried out assorted tasks aimed at testing how well a variety of representative gas fittings, valves, wires and seals located on the outside of the RRM module could be manipulated. It released safety launch locks and meticulously cut two extremely thin satellite lock wires – made of steel – and measuring just 20 thousandths of an inch (0.5 millimeter) in diameter.
“The wire cutting event was just minutes in duration. But both wire cutting tasks took approximately 6 hours of coordinated, safe robotic operations. The lock wire had been routed, twisted and tied on the ground at the interface of the Ambient Cap and T-Valve before flight,” said Cassidy.
This RRM exercise represents the first time that the Dextre robot was utilized for a technology research and development project on the ISS, a major expansion of its capabilities beyond those of robotic maintenance of the massive orbiting outpost.
Video Caption: Dextre’s Robotic Refueling Mission: Day 2. The second day of Dextre’s most demanding mission wrapped up successfully on March 8, 2012 as the robotic handyman completed his three assigned tasks. Credit: NASA/CSA
Wire Cutter Tool (WCT) Camera View of Ambient Cap Wire Cutting. Courtesy: Justin Cassidy to Universe Today. Credit NASA RRM
Altogether the three days of operations took about 43 hours, and proceeded somewhat faster than expected because they were as close to nominal as could be expected.
“Days 1 and 2 ran about 18 hours,” said Charles Bacon, the RRM Operations Lead/Systems Engineer at NASA Goddard, to Universe Today. “Day 3 ran approximately 7 hours since we finished all tasks early. All three days baselined 18 hours, with the team working in two shifts. So the time was as expected, and actually a little better since we finished early on the last day.”
Wire Cutter Tool (WCT) Camera View of T-Valve Wire Cutting. Courtesy: Justin Cassidy to Universe Today. Credit NASA RRM
“For the last several months, our team has been setting the stage for RRM on-orbit demonstrations,” Cassidy told me. “Just like a theater production, we have many engineers behind the scenes who have provided development support and continue to be a part of the on-orbit RRM operations.”
“At each stage of RRM—from preparation, delivery, installation and now the operations—I am taken aback by the immense efforts that many diverse teams have contributed to make RRM happen. The Satellite Servicing Capabilities Office at NASA’s Goddard Space Flight Center teamed with Johnson Space Center, Kennedy Space Center (KSC), Marshall Space Flight Center and the Canadian Space Agency control center in St. Hubert, Quebec to make RRM a reality.”
“The success of RRM operations to date on the International Space Station (ISS) using Dextre is a testament to the excellence of NASA’s many organizations and partners,” Cassidy explained.
The three day “Gas Fittings Removal task” was an initial simulation to practice techniques essential for robotically fixing malfunctioning satellites and refueling otherwise nominally operating satellites to extend to hopefully extend their performance lifetimes for several years.
Ground-based technicians use the fittings and valves to load all the essential fluids, gases and fuels into a satellites storage tanks prior to launch and which are then sealed, covered and normally never accessed again.
“The impact of the space station as a useful technology test bed cannot be overstated,” says Frank Cepollina, associate director of the Satellite Servicing Capabilities Office (SSCO) at NASA’s Goddard Space Flight Center in Greenbelt, Md.
“Fresh satellite-servicing technologies will be demonstrated in a real space environment within months instead of years. This is huge. It represents real progress in space technology advancement.”
Four more upcoming RRM experiments tentatively set for this year will demonstrate the ability of a remote-controlled robot to remove barriers and refuel empty satellite gas tanks in space thereby saving expensive hardware from prematurely joining the orbital junkyard.
The timing of future RRM operations can be challenging and depends on the availability of Dextre and the SSRMS arm which are also heavily booked for many other ongoing ISS operations such as spacewalks, maintenance activities and science experiments as well as berthing and/or unloading a steady stream of critical cargo resupply ships such as the Progress, ATV, HTV, Dragon and Cygnus.
Flexibility is key to all ISS operations. And although the station crew is not involved with RRM, their activities might be.
“While the crew itself does not rely on Dextre for their operations, Dextre ops can indirectly affect what the crew can or can’t do,” Bacon told me. “For example, during our RRM operations the crew cannot perform certain physical exercise activities because of how that motion could affect Dextre’s movement.”
Here is a list of forthcoming RRM operations – pending ISS schedule constraints:
Refueling (summer 2012) – After Dextre opens up a fuel valve that is similar to those commonly used on satellites today, it will transfer liquid ethanol into it through a sophisticated robotic fueling hose.
Thermal Blanket Manipulation (TBD 2012)- Dextre will practice slicing off thermal blanket tape and folding back a thermal blanket to reveal the contents underneath.
Electrical Cap Removal (TBD 2012)- Dextre will remove the caps that would typically cover a satellite’s electrical receptacle.
http://youtu.be/LboVN38ZdgU
RRM was carried to orbit inside the cargo bay of Space Shuttle Atlantis during July 2011 on the final shuttle mission (STS-135) of NASA’s three decade long shuttle program and then mounted on an external work platform on the ISS backbone truss by spacewalking astronauts. The project is a joint effort between NASA and CSA.
“This is what success is all about. With RRM, we are truly paving the way for future robotic exploration and satellite servicing,” Cassidy concluded. Full size Mock up of RRM box and experiment tool at KSC Press Site
Equipment Tool movements and manipulations by Dextre robot are simulated by NASA Goddard RRM manager Justin Cassidy. Credit: Ken Kremer
…….
March 24 (Sat): Free Lecture by Ken Kremer at the New Jersey Astronomical Association, Voorhees State Park, NJ at 830 PM. Topic: Atlantis, the End of Americas Shuttle Program, RRM, Orion, SpaceX, CST-100 and the Future of NASA Human & Robotic Spaceflight
As we reported earlier this month, The HiRISE camera captured a tornado in action on Mars, and this dramatic new video put together by the Jet Propulsion Laboratory provides new insights showing we’re definitely not in Kansas anymore!
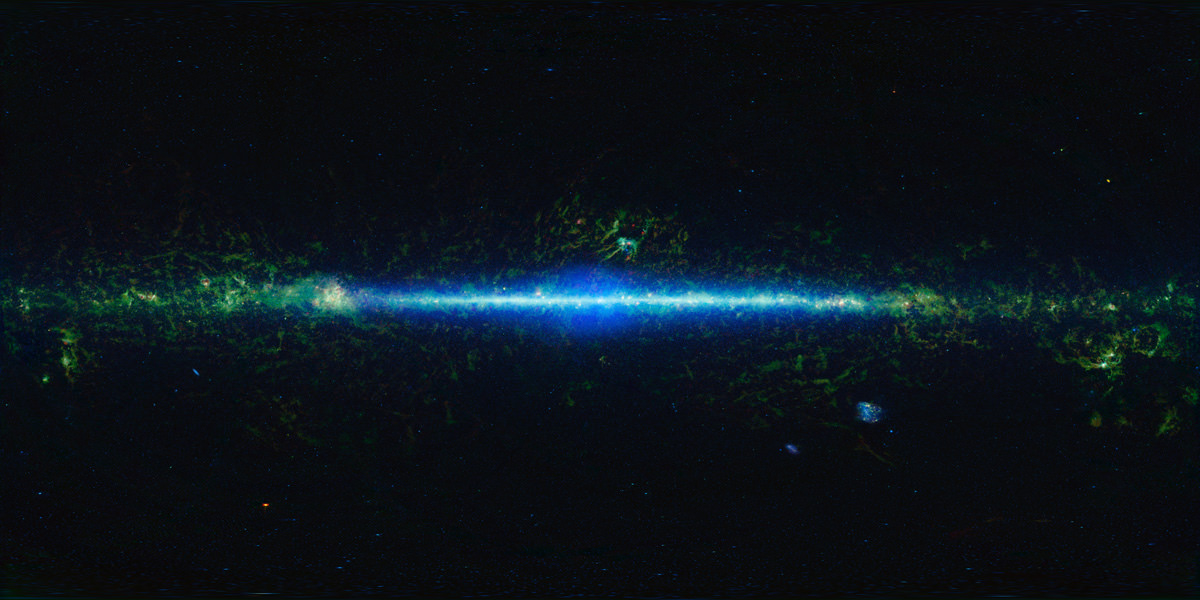
This is a mosaic of the images covering the entire sky as observed by the Wide-field Infrared Survey Explorer (WISE), part of its All-Sky Data Release. Image Credit: NASA/JPL-Caltech/UCLA
[/caption]
Love all the great things you can see in infrared? Then zoom on into the big view of the entire sky from the Wide-field Infrared Survey Explorer (WISE) mission. WISE has collected more than 15 trillion bytes of data with 2.7 million images of the sky at infrared light. It’s captured everything from nearby asteroids to distant galaxies, finding “Y-dwarfs,” a Trojan asteroid sharing Earth’s orbit, and stars and galaxies that had never been seen before, as well as showing astronomers that there are significantly fewer mid-size asteroids than previously thought.
Today NASA released a new atlas and catalog of the entire sky in infrared, and now even more discoveries are expected since anyone can have access to the whole sky as seen by the spacecraft.
“With the release of the all-sky catalog and atlas, WISE joins the pantheon of great sky surveys that have led to many remarkable discoveries about the universe,” said Roc Cutri, who leads the WISE data processing and archiving effort at the Infrared and Processing Analysis Center at the California Institute of Technology in Pasadena. “It will be exciting and rewarding to see the innovative ways the science and educational communities will use WISE in their studies now that they have the data at their fingertips.”
Thanks to John Williams at Starry Critters, you can now zoom into WISE’s entire map of the infrared sky. John notes some interesting things in the image: “The bright swath across the center is the Milky Way Galaxy; our home galaxy. The view is toward the center of the galaxy with the spiral arms stretching to the edges. Some artifacts were left in such as bright red spots off the plane of the galaxy. These are Saturn, Jupiter and Mars.”
A towering dust devil, casts a serpentine shadow over the Martian surface in this image acquired by the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter. Image credit: NASA/JPL-Caltech/Univ. of Arizona
[/caption]
Mars orbiters, rovers and landers have all captured devils in action before. But this latest shot is a whopper (to speak in the vernacular of the peasantry…*) – not to mention incredibly awesome! The HiRISE camera (High Resolution Imaging Science Experiment) on the Mars Reconnaissance Orbiter has taken an image of an afternoon whirlwind on Mars lofting a twisting column of dust more than 800 meters (about a half a mile) high, with the dust plume about 30 meters or yards in diameter.
HiRISE captured the image on Feb. 16, 2012, in the Amazonis Planitia region of northern Mars. Evidence of many previous whirlwinds, or dust devils, are visible as streaks on the dusty surface shown in the image.
Scientists from JPL said the active dust devil and its delicate arc were produced by a westerly breeze partway up its height.
Just like on Earth, winds on Mars are powered by solar heating. However, Mars is now farthest from the Sun, and even though the exposure to the Sun’s rays is now less, even so, the dust devils are moving dust around on Mars’ surface.
Dust devils occur on Earth as well as on Mars. They are spinning columns of air, made visible by the dust they pull off the ground. Unlike a tornado, a dust devil typically forms on a clear day when the ground is heated by the sun, warming the air just above the ground. As heated air near the surface rises quickly through a small pocket of cooler air above it, the air may begin to rotate, if conditions are just right.
MRO and HiRISE continue to provide insights into the planet’s ancient environments and how processes such as wind, meteorite impacts and seasonal frosts continue to affect the Martian surface today. This mission – operating since 2006 in Mars orbit – has returned more data about Mars than all other orbital and surface missions combined.
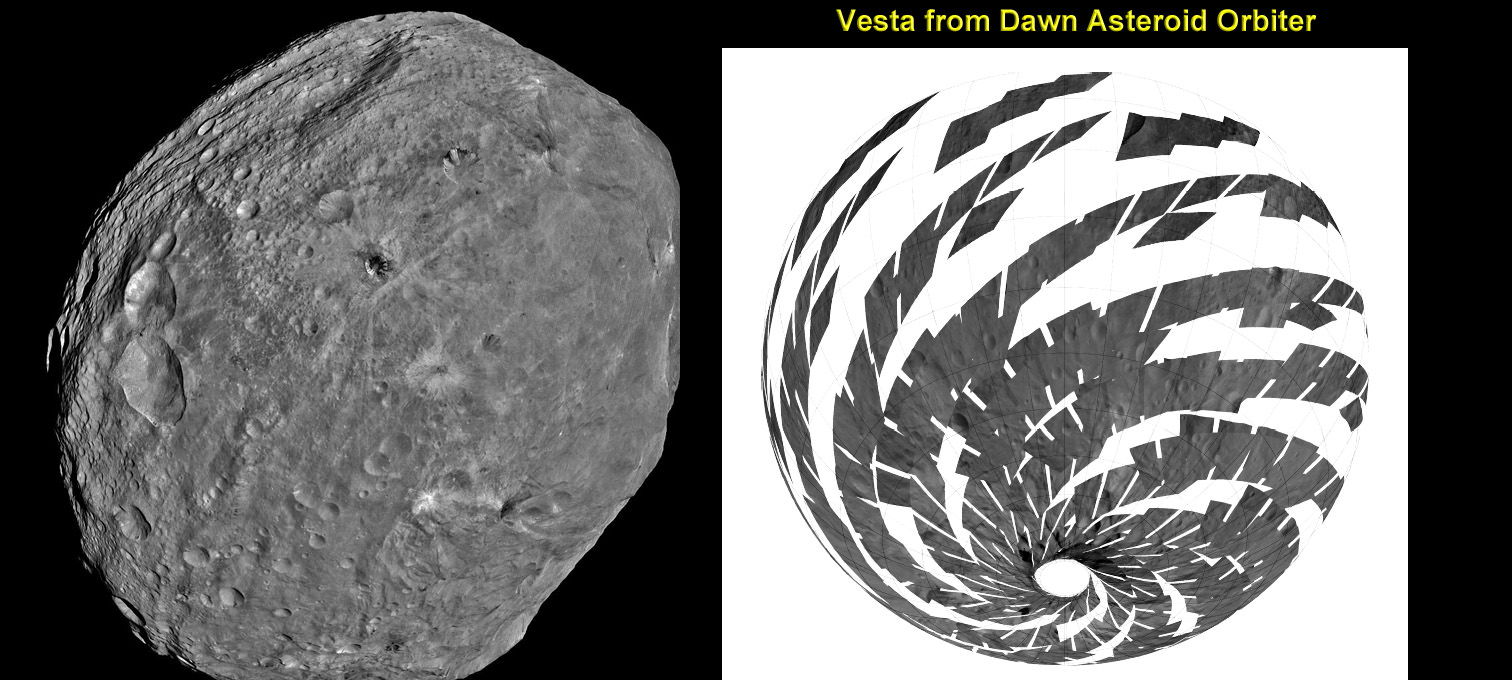
Vesta imaged by NASA’s Dawn Asteroid Orbiter. Dawn is currently at work at the Low Altitude Mapping Orbit (LAMO) acquiring new imagery and spectra of much higher resolution compared to these images acquired at higher altitudes and is also filling in gaps of surface data. The image from Dawn’s Framing Camera, at left, was taken on July 24 at a distance of 3,200 miles soon after achieving orbit around Vesta. The mosaic from Dawn’s Visible and infrared spectrometer (VIR), at right, was acquired from High-altitude mapping orbit (HAMO). Credit: NASA/ JPL-Caltech/ UCLA/ ASI/ INAF/ IAPS. Collage: Ken Kremer
[/caption]
NASA’s Dawn mission is getting a whopping boost in science observing time at the closest orbit around Asteroid Vesta as the probe passes the midway point of its 1 year long survey of the colossal space rock. And the team informs Universe Today that the data so far have surpassed all expectations and they are very excited !
Dawn’s bonus study time amounts to an additional 40 days circling Vesta at the highest resolution altitude for scientific measurements. That translates to a more than 50 percent increase beyond the originally planned length of 70 days at what is dubbed the Low Altitude Mapping Orbit, or LAMO.
“We are truly thrilled to be able to spend more time observing Vesta from low altitude,” Dr. Marc Rayman told Universe Today in an exclusive interview. Rayman is Dawn’s Engineer at NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, Calif.
“It is very exciting indeed to obtain such a close-up look at a world that even a year ago was still just a fuzzy blob.”
The big extension for a once-in-a-lifetime shot at up close science was all enabled owing to the hard work of the international science team in diligently handling any anomalies along the pathway through interplanetary space and since Dawn achieved orbit in July 2011, as well as to the innovative engineering of the spacecraft’s design and its revolutionary ion propulsion system.
“This is a reflection of how well all of our work at Vesta has gone from the beginning of the approach phase in May 2011,” Rayman told me.
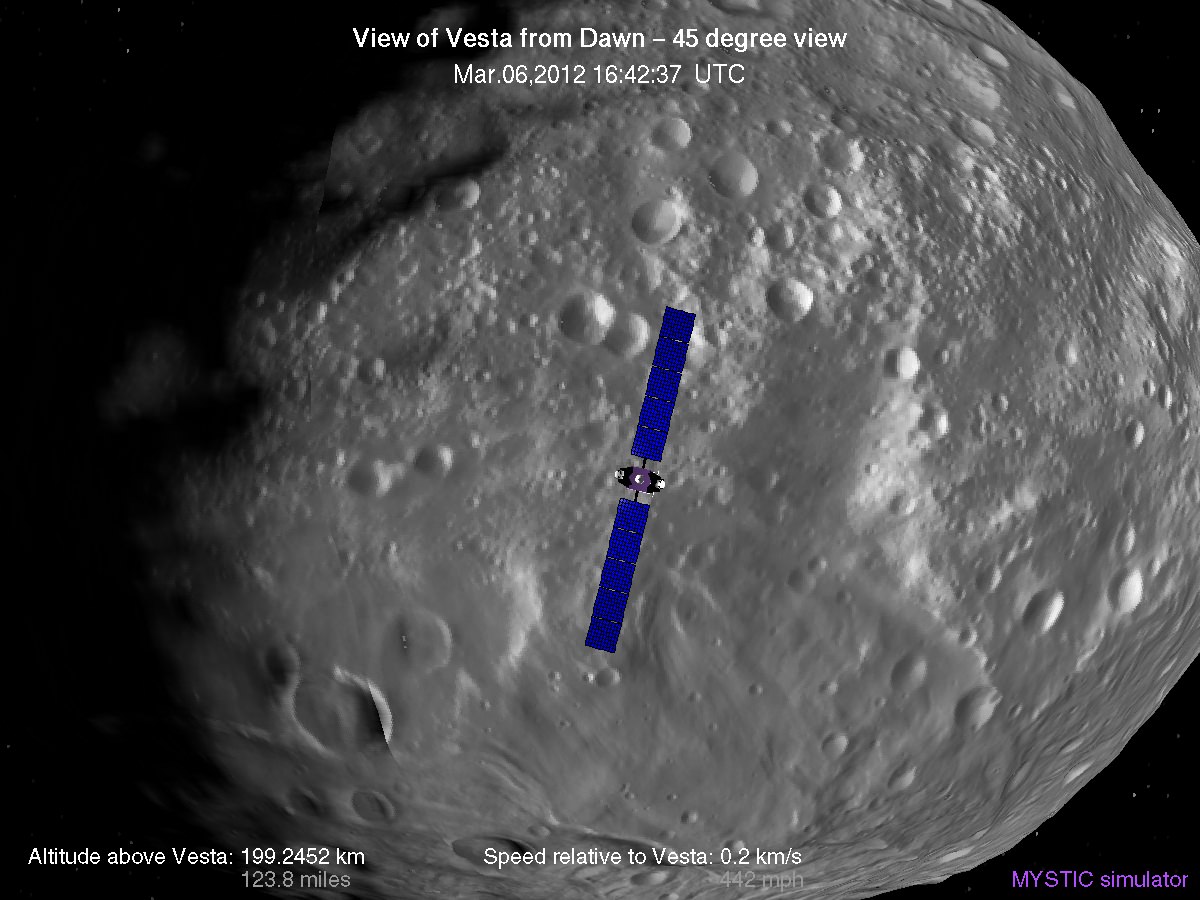
Simulated view of Vesta from Dawn in LAMO, low altitude mapping orbit - March, 6 2012
Credit: Gregory J. Whiffen, JPL
Dawn’s initially projected 10 week long science campaign at LAMO began on Dec. 12, 2011 at an average distance of 210 kilometers (130 miles) from the protoplanet and was expected to conclude on Feb. 20, 2012 under the original timeline. Thereafter it would start spiraling back out to the High Altitude Mapping Orbit, known as HAMO, approximately 680 kilometers above the surface.
“With the additional 40 days it means we are now scheduled to leave LAMO on April 4. That’s when we begin ion thrusting for the transfer to HAMO2,” Rayman stated.
And the observations to date at LAMO have already vastly surpassed all hopes – using all three of the onboard science instruments provided by the US, Germany and Italy.
“Dawn’s productivity certainly is exceeding what we had expected,” exclaimed Rayman.
“We have acquired more than 7500 LAMO pictures from the Framing Camera and more than 1 million LAMO VIR (Visible and Infrared) spectra which afford scientists a much more detailed view of Vesta than had been planned with the survey orbit and the high altitude mapping orbit (HAMO). It would have been really neat just to have acquired even only a few of these close-up observations, but we have a great bounty!”
“Roughly around half of Vesta’s surface has been imaged at LAMO.”
Dawn mosaic of Visible and Infrared spectrometer (VIR) data of Vesta
This mosaic shows the location of the data acquired by VIR (visible and infrared spectrometer) during the HAMO (high-altitude mapping orbit) phase of the Dawn mission from August to October 2011. Dawn is now making the same observations at the now extended LAMO (low-altitude mapping orbit) phase of the Dawn mission from December 2011 to April 2012. VIR can image Vesta in a number of different wavelengths of light, ranging from the visible to the infrared part of the electromagnetic spectrum. This mosaic shows the images taken at a wavelength of 550 nanometers, which is in the visible part of the electromagnetic spectrum. During HAMO VIR obtained more than 4.6 million spectra of Vesta. It is clear from this image that the VIR observations are widely distributed across Vesta, which results in a global view of the spectral properties of Vesta’s surface. This image shows Vesta’s southern hemisphere (lower part of the image) and equatorial regions (upper part of the image). NASA’s Dawn spacecraft obtained these VIR images with its visible and infrared spectrometer in September and October 2011. The distance to the surface of Vesta is around 700 kilometers (435 miles) and the average image resolution is 170 meters per pixel. Credit: NASA/ JPL-Caltech/ UCLA/ ASI/ INAF/ IAPS
The bonus time at LAMO will now be effectively used to help fill in the gaps in surface coverage utilizing all 3 science instruments. Therefore perhaps an additional 20% to 25% extra territory will be imaged at the highest possible resolution. Some of this will surely amount to enlarged new coverage and some will be overlapping with prior terrain, which also has enormous research benefits.
“There is real value even in seeing the same part of the surface multiple times, because the illumination may be different. In addition, it helps for building up stereo,” said Rayman.
Researchers will deduce further critical facts about Vesta’s topography, composition, interior, gravity and geologic features with the supplemental measurements.
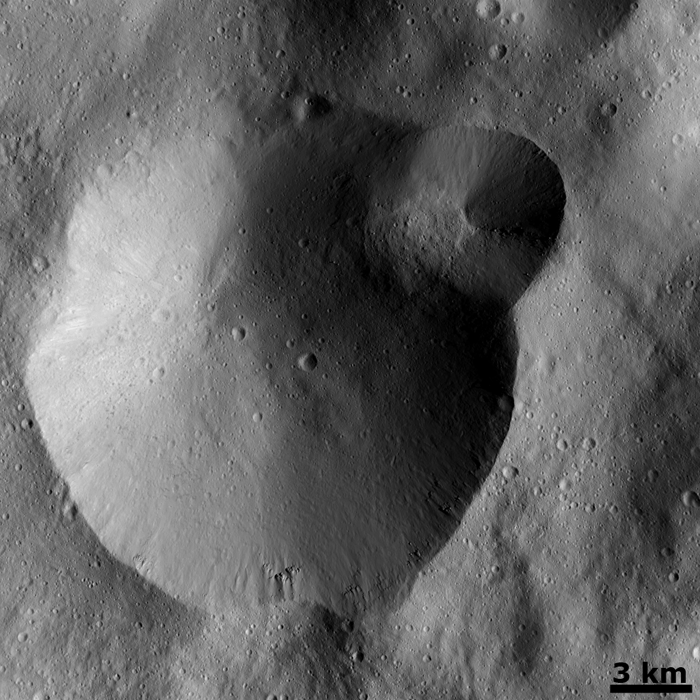
Successive formation of impact craters on Vesta
This Dawn FC (framing camera) image shows two overlapping impact craters and was taken on Dec. 18,2011 during the LAMO (low-altitude mapping orbit) phase of the mission. The large crater is roughly 20 kilometers (12 miles) in diameter and the smaller crater is roughly 6 kilometers (4 miles) in diameter. The rims of the craters are both reasonably fresh but the larger crater must be older because the smaller crater cuts across the larger crater’s rim. As the smaller crater formed it destroyed a part of the rim of the pre-existing, larger crater. The larger crater’s interior is more densely cratered than the smaller crater, which also suggests that is it older. In the bottom of the image there is some material slumping from rim of the larger crater towards its center. This image with its framing camera on Dec. 18, 2011. This image was taken through the camera’s clear filter. The distance to the surface of Vesta is 260 kilometers (162 miles) and the image has a resolution of about 22 meters (82 feet) per pixel. Credit: NASA/ JPL-Caltech/ UCLA/ MPS/ DLR/ IDA
The foremost science goals at LAMO are collection of gamma ray and neutron measurements with the GRaND instrument – which focuses on determining the elemental abundances of Vesta – and collection of information about the structure of the gravitational field. Since GRaND can only operate effectively at low orbit, the extended duration at LAMO takes on further significance.
“Our focus is on acquiring the highest priority science. The pointing of the spacecraft is determined by our primary scientific objectives of collecting GRaND and gravity measurements.”
As Dawn continues orbiting every 4.3 hours around Vesta during LAMO, GRaND is recording measurements of the subatomic particles that emanate from the surface as a result of the continuous bombardment of cosmic rays and reveals the signatures of the elements down to a depth of about 1 meter.
“You can think of GRaND as taking a picture of Vesta but in extremely faint light. That is, the nuclear emissions it detects are extremely weak. So our long time in LAMO is devoted to making a very, very long exposure, albeit in gamma rays and neutrons and not in visible light,” explained Rayman.
Now with the prolonged mission at LAMO the team can gather even more data, amounting to thousands and thousands more pictures, hundreds of thousands of more VIR spectra and ultra long exposures by GRaND.
“HAMO investigations have already produced global coverage of Vesta’s gravity field,” said Sami Asmar, a Dawn co-investigator from JPL. Extended investigations at LAMO will likewise vastly improve the results from the gravity experiment.
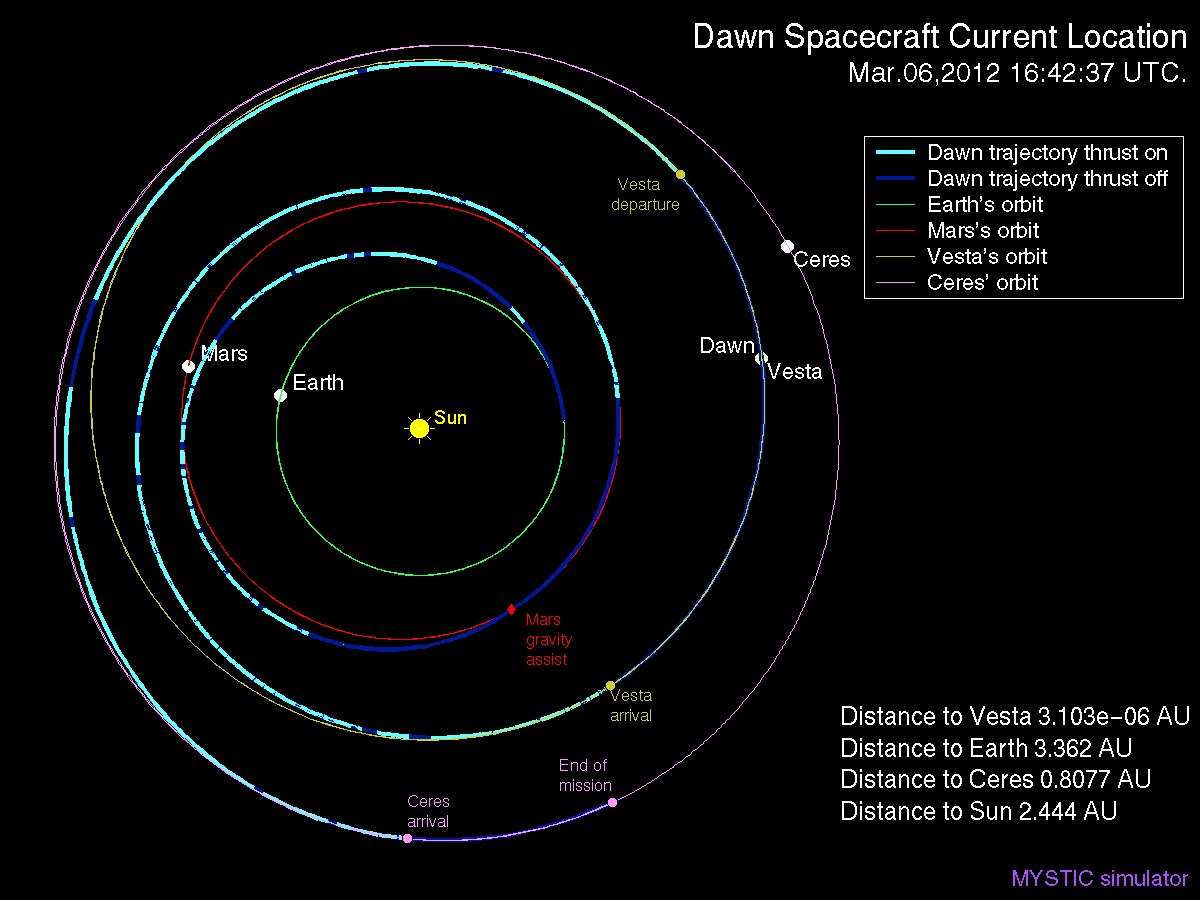
Dawn Spacecraft Current Location and Trajectory - March, 6 2012. Credit: Gregory J. Whiffen, JPL
“We always carried 40 days of “margin,” said Rayman, “but no one who was knowledgeable about the myriad challenges of exploring this uncharted world expected we would be able to accomplish all the complicated activities before LAMO without needing to consume some of that margin. So although we recognized that we might get to spend some additional time in LAMO, we certainly did not anticipate it would be so much.”
“As it turned out, although we did have surprises the operations team managed to recover from all of them without using any of those 40 days.”
“This is a wonderful bonus for science,” Rayman concluded.
“We remain on schedule to depart Vesta in July 2012, as planned for the past several years.”
Dawn’s next target is Ceres, the largest asteroid in the main Asteroid Belt between Mars and Jupiter
Artist rendition of NASA’s Mars InSight (Interior exploration using Seismic Investigations, Geodesy and Heat Transport) Lander. InSight is based on the proven Phoenix Mars spacecraft and lander design with state-of-the-art avionics from the Mars Reconnaissance Orbiter (MRO) and Gravity Recovery and Interior Laboratory (GRAIL) missions. Credit: JPL/NASA
[/caption]
A Phoenix-like lander that would mine the deepest hole yet into Mars– to a depth of 5 meters – and unveil the nature of the mysterious deep interior and central core of the Red Planet is under consideration by NASA for a 2016 launch and sports a nifty new name – InSight.
The stationary “InSight” lander would be an international science mission and a near duplicate of NASA’s proven Phoenix spacecraft, Bruce Banerdt told Universe Today. Banerdt is the Principal Investigator of the proposed InSight mission.
“InSight is essentially built from scratch, but nearly build-to-print from the Phoenix design,” Banerdt, of NASA’s Jet Propulsion Laboratory (JPL) in Pasadena , Calif, told me. The team can keep costs down by re-using the blueprints pioneered by Phoenix instead of creating an entirely new spacecraft.
“The robotic arm is similar (but not identical) to the Phoenix arm.”
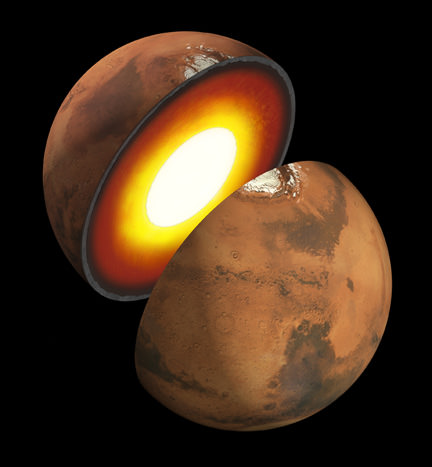
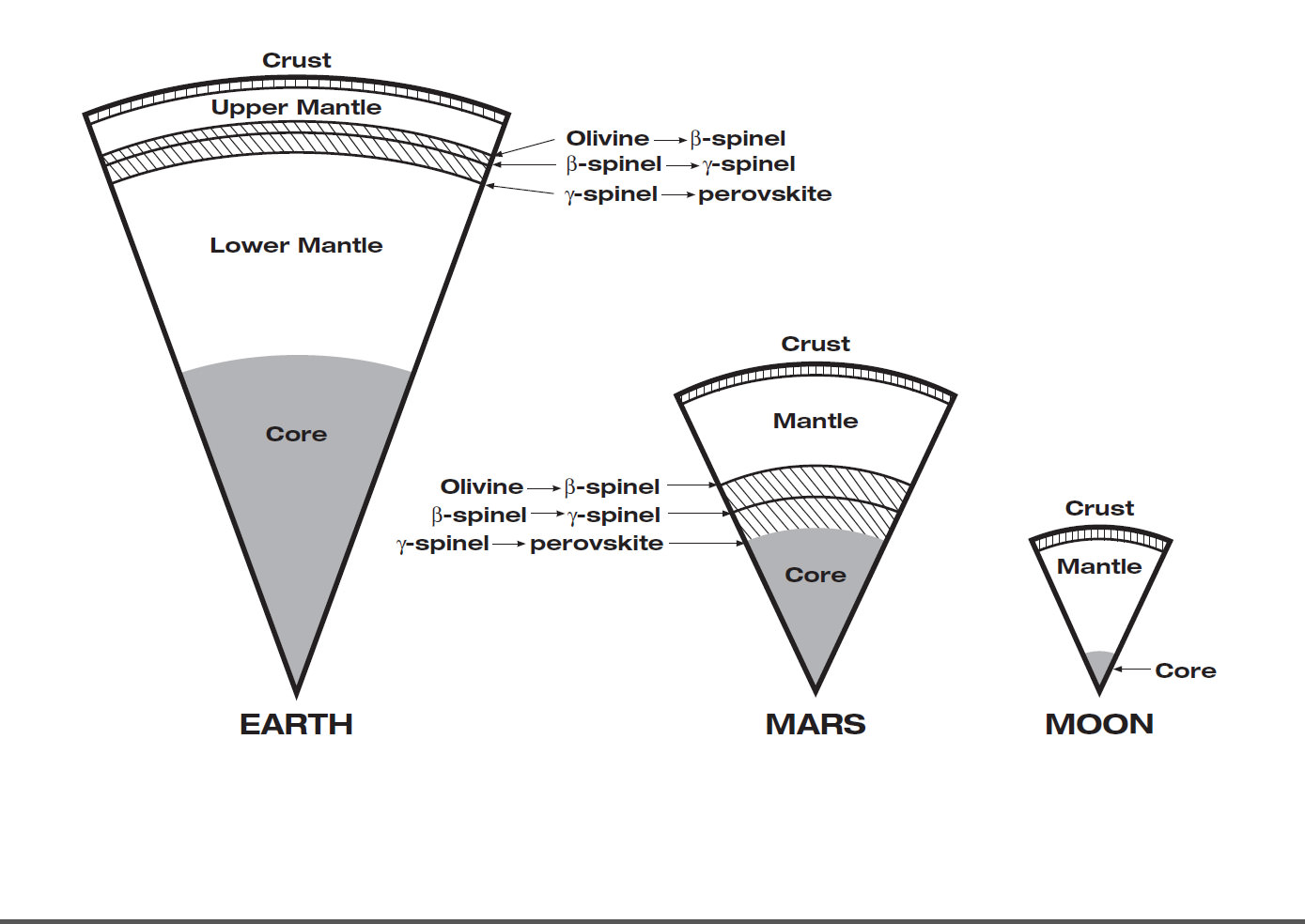
Mars Interior
Insight’s goal is to investigate and deduce the nature of the interior of the Red Planet. Credit: JPL/NASA
However, the landing site and science goals for InSight are quite different from Phoenix.
InSight will have an entirely new suite of three science instruments, including two from Europe, designed to peer to the center of Mars and detect the fingerprints of the processes by which the terrestrial planets formed. It will determine if there is any seismic activity, the amount of heat flow from the interior, the size of Mars core and whether the core is liquid or solid.
NASA’s twin GRAIL lunar gravity probes are set to begin their own investigation into the interior and core of Earth’s Moon in early March 2012, and several science team members are common to GRAIL and InSight.
“The seismometer (SEIS, stands for Seismic Experiment for Interior Structure) is from France (built by CNES and IPGP) and the heat flow probe (HP3, stands for Heat flow and Physical Properties Probe) is from Germany (built by DLR),” Banerdt explained.
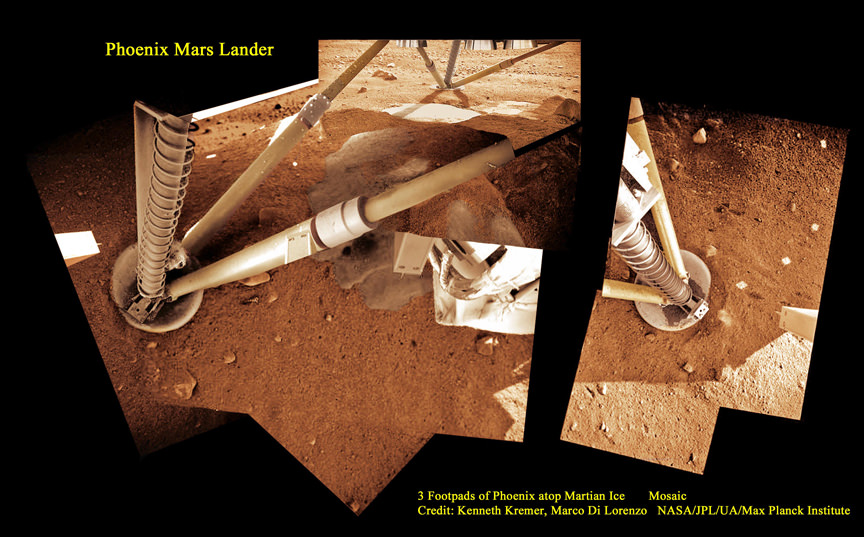
Phoenix successfully landed in the frigid northern polar regions of Mars in 2008 in search of potential habitats for life and quickly discovered water ice and salty soils that could be favorable for the genesis and support of extraterrestrial life.
3 Footpads of Phoenix Mars Lander atop Martian Ice
Phoenix thrusters blasted away Martian soil and exposed water ice. Proposed Mars InSight mission will build a new Phoenix-like lander from scratch to peer deep into the Red Planet and investigate the nature and size of the mysterious Martian core. Credit: Kenneth Kremer, Marco Di Lorenzo, Phoenix Mission, NASA/JPL/UA/Max Planck Institute
InSight will intentionally land in a far warmer and sunnier location nearer the moderate climate of the equator to enable a projected lifetime of 2 years (or 1 Mars year) vs. the 5 months survival of Phoenix extremely harsh arctic touchdown zone.
“Our planned landing site is in Elysium Planitia,” Banerdt told me. “It was chosen for optimizing engineering safety margins for landing and power.”
The more equatorial landing site affords far more sun for the life giving solar arrays to power the instruments and electronics.
“We have global objectives and can do our science anywhere on the planet.”
Elysium Planitia is not too far from the landing sites of the Spirit and Curiosity rovers. The Elysium Mons volcano is also in the general area, but it’s a long way from precise site selection.
InSight is a geophysical lander targeted to delve deep beneath the surface into the Martian interior, check its “vital signs”; like “pulse” though seismology, “temperature”, though a heat flow probe, and “reflexes”, through precision tracking.
The purpose is to answer one of science’s most fundamental questions: How were the planets created?
InSight will accomplish much of its science investigations through experiments sitting directly in contact with the Martian surface. The robotic arm will pluck two of the instruments from the lander deck and place them onto Mars.
“The arm will pick the SEIS seismometer and HP3 heat flow probe off the deck and place each on the ground next to the lander. The arm doesn’t have a drill, but the heat flow probe itself will burrow down as deep as 5 meters,” Banerdt elaborated.
The third experiment named RISE (Rotation and Interior Structure Experiment) is to be provided by JPL and will use the spacecraft communication system to provide precise measurements of Mars planetary rotation and elucidate clues to its interior structure and composition.
Right now on Mars, NASA’s Opportunity rover is conducting a Doppler radio tracking experiment similar to what is planned for RISE, but InSight will have a big advantage according to Banerdt.
“The RISE experiment will be very similar to what we are doing right now on Opportunity, but will be able to do much better, said Banerdt. “The differences are that we will get more tracking every week (Opportunity is power-limited during the winter months; that’s why she is currently stationary!) and will make measurements for an entire Mars year – we will likely only get a handful of months from Opportunity.”
Insight will also be equipped with 2 cameras and make some weather measurements.
“We have a camera on the arm and one fixed to the deck, both primarily to support placing the instruments on the surface, although they will be able to scan the landscape around the spacecraft. Both are Black & White,” Banerdt told me.
“We will measure pressure, temperature and wind, mostly to support noise analysis on the seismic data, but will also supply information on the weather.”
Mars has the same basic internal structure as the Earth and other terrestrial (rocky) planets. It is large enough to have pressures equivalent to those throughout the Earth's upper mantle, and it has a core with a similar fraction of its mass. In contrast, the pressure even near the center of the Moon barely reach that just below the Earth's crust and it has a tiny, almost negligible core. The size of Mars indicates that it must have undergone many of the same separation and crystallization processes that formed the Earth's crust and core during early planetary formation. Credit: JPL/NASA
InSight is one of three missions vying to be selected for flight in NASA’s Discovery Program, a series of low cost NASA missions to understand the solar system by exploring planets, moons, and small bodies such as comets and asteroids. All three mission teams are required to submit concept study reports to NASA on March 19.
Banerdt’s team is working hard to finalize the concept study report.
“It describes the mission design as we have refined it over the past 9 months since the NASA Step-1 selection.”
So there is no guarantee that InSight will fly. Because of severe budget cuts to NASA’s Planetary Science Division, NASA had to cancel its scheduled participation in two other Mars missions dubbed ExoMars and jointed planned with ESA, the European Space Agency, for launch in 2016 and 2018.
Expedition 20 crew on the ISS share a meal in the galley in the Unity Node. Credit: NASA
[/caption]
If you’ve always dreamed of being an astronaut here’s the next best thing, and the location couldn’t be more idyllic. Scientists from Cornell and the University of Hawaii are conducting a 120-day Mars exploration analog study in a simulated Mars habitat on the lava fields of the Big Island of Hawai’i. The study will focus on the diets of six volunteers, who will be required to live and work like astronauts, including suiting up in space gear whenever they head outside of their habitat. But the emphasis will be for participants compare two types of foods: crew-cooked vs. pre-prepared, in order to avoid what has been termed “menu fatigue” over a long-duration mission. Applications are currently being taken for the job.
Jean Hunter, associate professor of biological and environmental engineering at Cornell and several colleagues have received a $947,000 NASA grant for the study, the Hawaii Space Exploration Analogue & Simulation, or HI-SEAS. Hunter said current astronauts on the International Space Station not only tire of eating foods they normally enjoy but also tend to eat less, which can put them at risk for nutritional deficiency, loss of bone and muscle mass, and reduced physical capabilities. Plus, all foods decline in nutritional quality over time, and only a few of the many available astronaut foods have the three-to-five-year shelf life required for a Mars mission.
Bags of Space Station food and utensils on tray. Credit: NASA
So, the participants will also help determine how being on a landed mission on Mars would make different ways of cooking — and perhaps gardening — possible, which would give the astronauts more food variety and relieve menu fatigue.
So, the study will help determine the palatability of ‘instant’ foods and food prepared by the crew from shelf stable ingredients, and determine whether food acceptability changes over time. It will also help estimate use of crew time, power, and water for meal preparation and cleanup, for both instant and crew-cooked foods and determine if crewmembers’ taste and smelling acuity change over time.
Participants chosen will need to attend a workshop and two-week training mission. Round trip travel, food and lodging expenses are provided. The crew will receive $5,000 as compensation. The researchers said the qualifications for people applying for the study are similar to those required by NASA for their astronaut applicants.
Hurry, as the deadline is 11:59pm Hawaii time on February 29th, 2012. You can find more information and the application form at the HI-SEAS website. You can also check out their Facebook page.
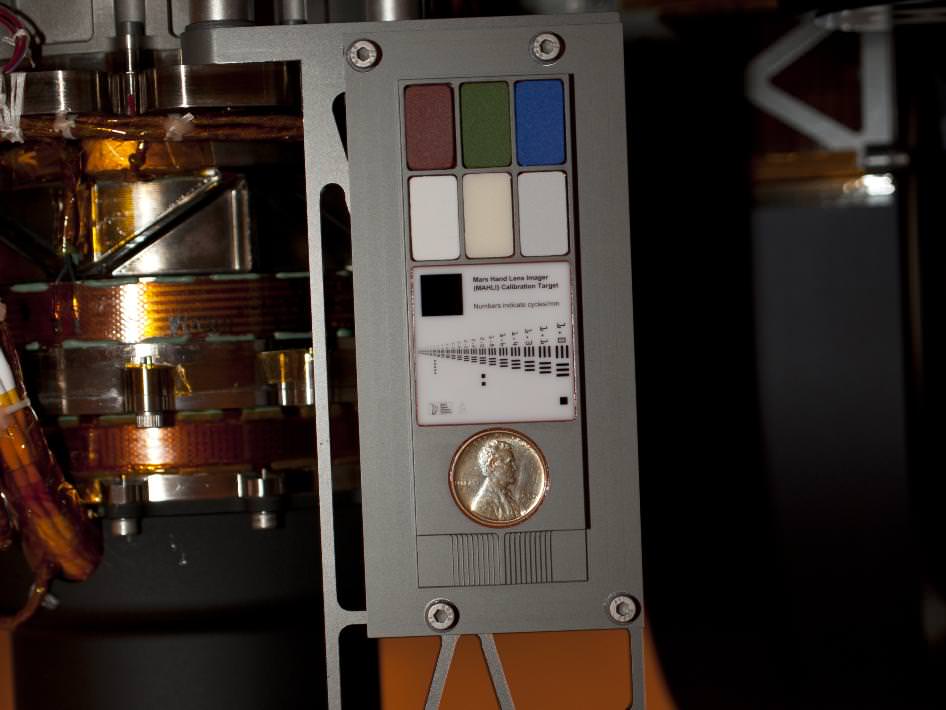
NASA's Mars rover Curiosity carries a Lincoln Penny on the calibration target to be used by a camera at the end of the robotic arm. The calibration target for the Mars Hand Lens Imager (MAHLI) camera is attached to a shoulder joint of the arm. Inset shows the location of the calibration target. Credit: NASA/JPL-Caltech
[/caption]
NASA’s huge Curiosity Mars Science Lab (MSL) rover is carrying a vintage Lincoln penny along for the long interplanetary journey to Mars – and it’s not to open the first Martian savings account.
Scientists will use the century old Lincoln penny – minted back in 1909 – as a modern age calibration target for one of Curiosity’s five powerful science cameras attached to the end of the hefty, 7 foot (2.1 meter) long robotic arm.
The car sized rover is on course to touchdown at the foothills of a towering and layered mountain inside Gale Crater in just 161 days on Aug. 6, 2012.
So far Curiosity has traveled 244 million kilometers since blasting off on Nov. 26, 2011 from Florida and has another 322 million kilometers to go to the Red Planet.
The copper penny is bundled to a shoulder joint on the rovers arm along with the other elements of the calibration target, including color chips, a metric standardized bar graphic, and a stair-step pattern for depth calibration.
The whole target is about the size of a smart phone and looks a lot like an eye vision chart in an ophthalmologist’s office. And it serves a similar purpose, which will be to check the performance of Curiosity eyes – specifically the Mars Hand Lens Imager (MAHLI) camera located at the terminus of the robotic arm.
Curiosity’s Calibration Target
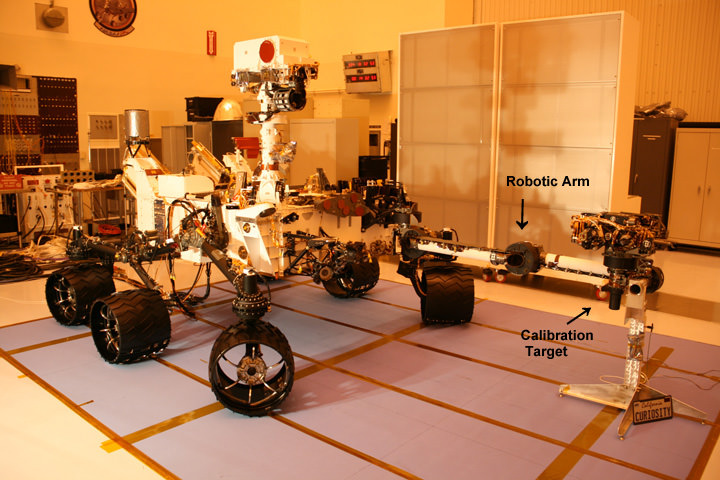
Two instruments at the end of the robotic arm on NASA's Mars rover Curiosity will use calibration targets attached to a shoulder joint of the arm. Credit: NASA/JPL-Caltech
MAHLI will conduct close-up inspections of Martian rocks and soil. It can show tiny details, finer than a human hair.
The term “hand lens” in MAHLI’s name refers to the standard practice by field geologists’ of carrying a hand lens during expeditions for close up, magnified inspection of rocks they find along the way. So it’s also critical to pack various means of calibration so that researchers can interpret their results and put them into proper perspective.
MAHLI can also focus on targets over a wide range of distances near and far, from about a finger’s-width away out to the Red Planets horizon, which in this case means the mountains and rim of the breathtaking Gale Crater landing site.
“When a geologist takes pictures of rock outcrops she is studying, she wants an object of known scale in the photographs,” said MAHLI Principal Investigator Ken Edgett, of Malin Space Science Systems, San Diego, which supplied the camera to NASA.
Curiosity Mars Science Laboratory Rover - inside the Cleanroom at KSC
Curiosity with robotic arm extended. Calibration target is located at a shoulder joint on the arm. Photo taken just before encapsulation for 8 month long interplanetary Martian Journey and touchdown inside Gale Crater. Credit: Ken Kremer
The target features a collection of marked black bars in a wide range of labeled sizes to correlate calibration images to each image taken by Curiosity.
“If it is a whole cliff face, she’ll ask a person to stand in the shot. If it is a view from a meter or so away, she might use a rock hammer. If it is a close-up, as the MAHLI can take, she might pull something small out of her pocket. Like a penny.”
Edgett donated the special Lincoln penny with funds from his own pocket. The 1909 “VDB” cent stems from the very first year that Lincoln pennies were minted and also marks the centennial of President Abraham Lincoln’s birth. The VDB initials of the coin’s designer – Victor David Brenner — are on the reverse side. In mint condition the 1909 Lincoln VDB copper penny has a value of about $20.
The Lincoln penny in this photograph is part of a camera calibration target attached to NASA's Mars rover Curiosity. Credit: NASA/JPL-Caltech
“The penny is on the MAHLI calibration target as a tip of the hat to geologists’ informal practice of placing a coin or other object of known scale in their photographs. A more formal practice is to use an object with scale marked in millimeters, centimeters or meters,” Edgett said. “Of course, this penny can’t be moved around and placed in MAHLI images; it stays affixed to the rover.”
“Everyone in the United States can recognize the penny and immediately know how big it is, and can compare that with the rover hardware and Mars materials in the same image,” Edgett said.
“The public can watch for changes in the penny over the long term on Mars. Will it change color? Will it corrode? Will it get pitted by windblown sand?”
MAHLI’s calibration target also features a display of six patches of pigmented silicone to assist in interpreting color and brightness in the images. Five of them are leftovers from Spirit and Opportunity. The sixth has a fluorescent pigment that glows red when exposed to ultraviolet light, allows checking of an ultraviolet light source on MAHLI. The fluorescent material was donated to the MAHLI team by Spectra Systems, Inc., Providence, R.I.
Three-dimensional calibration of the MSL images will be done using the penny and a stair-stepped area at the bottom of the target.
“The importance of calibration is to allow data acquired on Mars to be compared reliably to data acquired on Earth,” said Mars Science Laboratory Project Scientist John Grotzinger, of the California Institute of Technology, Pasadena.
Curiosity is a 1 ton (900 kg) behemoth. She measures 3 meters (10 ft) in length and is nearly twice the size and five times as heavy as Spirit and Opportunity, NASA’s prior set of twin Martian robots. The science payload is 15 times heavier than the twin robots.
Curiosity is packed to the gills with 10 state of the art science instruments that are seeking the signs of life in the form of organic molecules – the carbon based building blocks of life as we know it.
NASA could only afford to build one rover this time.
Curiosity MSL location on 27 Feb 2012. Credit: NASA
Curiosity will be NASA’s last Mars rover since the 4th generation ExoMars rover due to liftoff in 2018 was just cancelled by the Obama Administration as part of a deep slash to NASA’s Planetary Science budget.
En route to the Red Planet, Mars rover Curiosity has experienced the strongest solar radiation storm since 2005. No need to be alarmed: Researchers say it’s all part of Curiosity’s job as a ‘stunt double’ for human astronauts.