If you've looked at the high resolution HiRISE images from the Mars Reconnaissance Orbiter, or had the chance to explore the new Google Mars, you know Mars is fraught with craters, mountains, gullies, and all sorts of interesting – and dangerous – terrain. Areas such as these with layered deposits, sediments, fracturing and faulting are just the type of places to look for the sources of methane that is being produced on Mars.
But it's much too risky to send our current style of rovers, including the 2011 Mars Science Laboratory (MSL), into treacherous terrain. But engineers from JPL, along with students at the California Institute of Technology have designed and tested a versatile, low-mass robot that could be added to larger rovers like MSL that can rappel off cliffs, travel nimbly over steep and rocky terrain, and explore deep craters.
This prototype rover, called Axel, might help future robotic spacecraft better explore and investigate foreign worlds such as Mars. On Earth, Axel might assist in search-and-rescue operations.
Watch a video showing an Axel test-run at the JPL Mars yard.
"Axel extends our ability to explore terrains that we haven't been able to explore in the past, such as deep craters with vertically-sloped promontories," said Axel's principal investigator, Issa A.D. Nesnas, of JPL's robotics and mobility section. "Also, because Axel is relatively low-mass, a mission may carry a number of Axel rovers. That would give us the opportunity to be more aggressive with the terrain we would explore, while keeping the overall risk manageable."
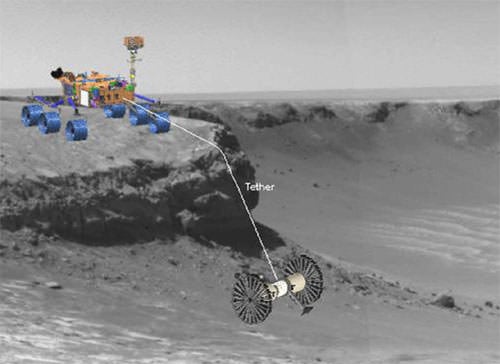
Nesnas said Axel is like a yo-yo -- it is on a tether attached to a larger rover and can go up and down the sides of craters, canyons and gullies, exploring regions not safe for other rovers.
The simple and elegant design of Axel, which can operate both upside down and right side up, uses only three motors: one to control each of its two wheels and a third to control a lever. The lever contains a scoop to gather lunar or planetary material for scientists to study, and it also adjusts the robot's two stereo cameras, which can tilt 360 degrees.
Axel's cylindrical body has computing and wireless communications capabilities and an inertial sensor to operate autonomously. It also sports a tether that Axel can unreel to descend from a larger lander, rover or anchor point. The rover can use different wheel types, from large foldable wheels to inflatable ones, which help the rover tolerate a hard landing and handle rocky terrain.
Axel has been in development since 1999, and students from Caltech, Purdue University, and Arkansas Tech University have collaborated with JPL over the years to develop this versatile rover.
For more information on Axel, see JPL's Axel page, and Caltech's Axel website.
