Intuitive Machines recently had a major breakthrough, successfully becoming the first non-governmental entity to land on the Moon in February. At least the landing was partially successful - the company's Odysseus lander ended up on its side, though its instruments and communication links remained at least partially functional. That mission, dubbed IM-1, was the first in a series of ambitious missions the company has planned. And they recently released a paper detailing features of a unique hopping robot that will hitch a ride on its next Moon mission.
Known as South Pole Hopper (or S.P. Hopper), the robot will be the first of a new class called µNova. Weighing in at only 35 kg and standing only 70 cm tall, this miniaturized craft is a stand-alone spacecraft that can operate entirely autonomously. It must do this to complete its mission of exploring the region around the permanently shadowed regions (PSRs) at the lunar south pole.
Specifically, the craft has four distinct objectives:
- Determine the geologic properties of a specific ridge at the south pole, including inside a PSR
- Determine the surface brightness temperatures of both areas bathed at least partially in the Sun's rays and also in the PSR.
- Research the "surface roughness" and "thermal inertia" of the Moon's regolith at its landing location.
- Determine how much hydrogen there is in the general area - with the understanding that, most likely, it will be tied up in water.
None of those objectives individually require S.P. Hopper's most notable feature - but it sure would be helpful to complete them - it can "hop" by thrusting itself off the lunar surface and landing in an area it chooses completely autonomously - even in a PSR. It can do so at an angle of up to 10 degrees, the company is quick to point out, given its recent difficulties with spacecraft angle.
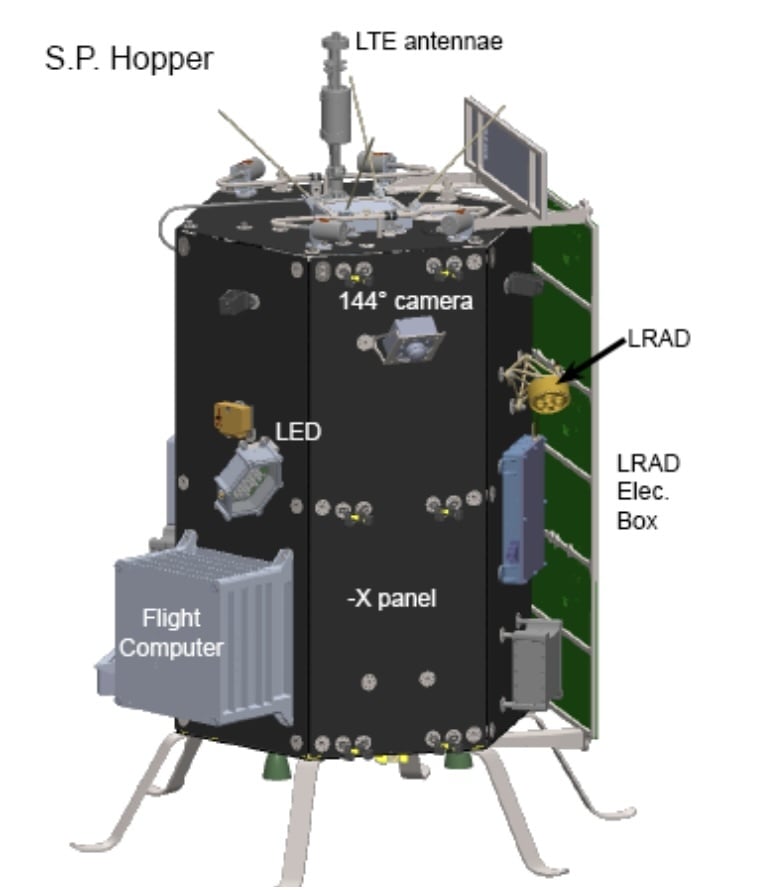
The paper describes several technical features of the hopper - including the fact that it will use a wireless LTE system to communicate. To collect the data required for its mission, it has three main scientific instruments: a set of CMOS cameras, whose primary task is to help with autonomous navigation but can also send pictures back to Earth to be analyzed; the LRAD thermopile sensor system; designed to capture brightness measurements of the regolith, and the PLWS, a miniature neutron spectrometer, specifically designed to look for hydrogen in space.
However, perhaps the most interesting part of the paper details its flight plan. S. P. Hopper is designed to make 5 - possibly 6 - hops when it lands at the lunar south pole. The first will be a "commissioning hop" that will only traverse 20 m or so. Next will be a 100 m "proof of concept" hop that will demonstrate that a hopping robot is a viable mode of transportation on the Moon.
Following those initial flights, S. P. Hopper will fly about 300 m to the rim of Marston crater, part of the Shackleton - de Gerlache ridge. It will then fly into the crater itself, which is a PSR, and then fly back out to the ridge again. If there's enough fuel left, Intuitive Machines plans a 6th exploratory flight to look at anything interesting in the vicinity.
Fraser discusses Intuitive Machine's lunar landing.Currently, IM-2, the flight that will take S.P. Hopper to the South Pole, is scheduled for launch sometime this year. Given Intuitive Machine's relative success with the Odysseus lander, there's a lot of optimism about the success of this mission as well. For now, though, we'll have to wait and see if the company can pull off an even more successful follow-on mission.
Learn More:
Martin et al - S.P. HOPPER: IN-SITU EXPLORATION OF THE SHACKLETON DE GERLACHE RIDGE
UT - NASA is Going Ahead With a Hopping Lander to Explore the Lunar Surface
UT - China’s Chang’e-7 Will Deploy a Hopper that Jumps into a Crater in Search of Water Ice
UT - Drones Could Help Map the Lunar Surface with Extreme Precision
Lead Image:
View of the S.P Hopper.
Credit - Martin et al.