
If we send some type of nuclear-powered tunnelbot to Europa to seek life under its icy shield, how will we know what it finds? How can a probe immersed in water under all that ice communicate with Earth? We only have hints about the nature of that ice, what layers it has and what pockets of water it might hold.
All we know is that it's tens of kilometres thick and as hard as granite.
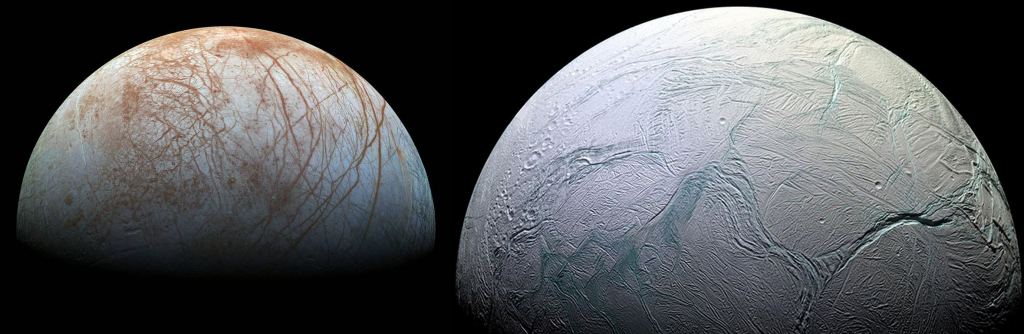
There's tantalizing evidence for habitability on ocean moons like Jupiter's Europa and Saturn's Enceladus. The Hubble Space Telescope found persistent water vapour in Europa's tenuous atmosphere, and the vapour had to come from somewhere. NASA's Galileo mission studied the Jovian system from 1995 to 2003 and found that Europa likely has more water in its subsurface ocean than all of Earth's oceans combined. And that water is salty.
Though the outer layer is frozen solid, tidal flexing can heat the water closer to the core and keep it in a liquid state. And wherever we find liquid water in the Solar System, we should investigate.
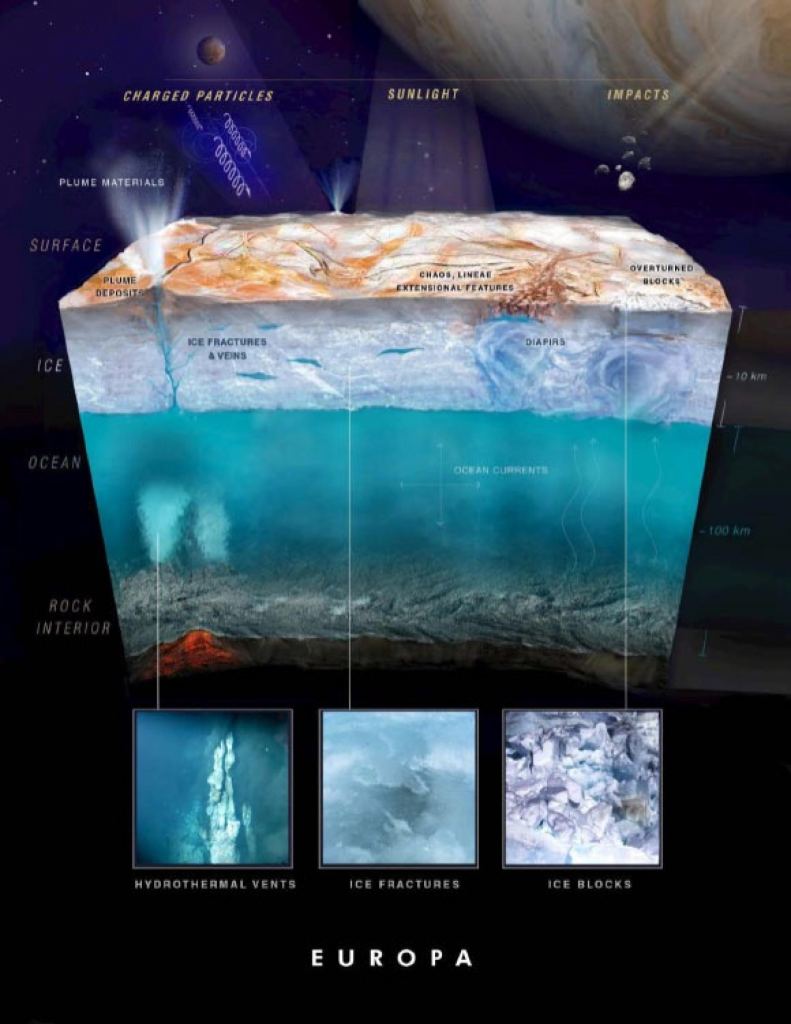
Europa's icy shell is hard as granite. It could take years for a robotic explorer to work its way through all of Europa's ice to its buried ocean. The leading design candidate for tunnelling through all that ice is a nuclear-powered cryobot. A cryobot would be paired with a lander and connected via a tether. Once it broke through into the ocean, it could gather data. Another idea is a cryobot that would release a swarm of tiny bots to take in-situ measurements across a wider area for better sampling.
The tunneller could encounter pockets of liquid water on its way, which could produce results sooner, but the ocean is the goal. How can mission operators communicate with it during its laborious journey? How could the robot(s) communicate as they travelled downward?
Rovers exploring Mars have it easy. They simply send their data to an orbiter, which relays it back to Earth via NASA's Deep Space Network (DSN.) The DSN is a network of three facilities in the USA, Spain, and Australia about 120 ° apart. That means any spacecraft sending data back to Earth can always reach one of the facilities. NASA's pretty generous and lets other nations use its system.
But the environment at Europa is much different. Europa is beholden to Jupiter, and getting something to orbit Europa is difficult because of Jupiter's gravitational power. Jupiter is also highly radioactive, which Juno mission designers had to buttress that spacecraft against. NASA's Europa Clipper spacecraft is set to launch in a couple of years to explore the icy moon, but it'll orbit Jupiter, not Europa. A reasonable solution is to have the under-the-ice robot communicate with a lander that periodically uploads the data to a spacecraft orbiting Jupiter, which then communicates with Earth.
But there's still the daunting problem of communication between the sub-surface bot and the lander. Though Europa is the smoothest-surfaced object in the Solar System, surface images of the moon show very few craters. That means that it's continually being resurfaced by tectonic activity. So Europa's thick covering of ice is not quiescent. How can a tunnelling cryobot communicate with a lander through a tether when the ice is under stress and shifting and quaking? The entire mission is essentially over if the tether is damaged or severed.
"Communication hardware faces challenging technical risks due to the expected tectonic activity within the ice shells, their challenging thermal regimes, chemistries, and tidal motions."Signals Through the Ice Team, 2022 Lunar and Planetary Science Conference
This is where the Signals Through the Ice (STI) team comes in. They're working with fibre-optic tethers like those used in polar exploration to see if they can adapt them to Europa's conditions. Europa is far colder than Earth's polar regions. Europa's ice could be between 100 - 260 Kelvin (-173 to -13 C; -280 to 8 F.)
It's not just the temperature. That ice will likely move, grind against itself, and experience shearing. A communications tether would have to withstand everything Europa put it through; otherwise, the whole mission is at risk. "Communication hardware faces challenging technical risks due to the expected
tectonic activity within the ice shells, their challenging thermal regimes, chemistries, and tidal motions," the STI team stated in a brief for the 2022 Lunar and Planetary Science Conference.
The STI team tested their tether design in simulated Europa conditions. The tether consists of commercial-grade optical fibre inside three separate protective layers, including a crush protective outer layer and a kevlar middle layer. These tethers are currently used on ocean submersibles here on Earth.
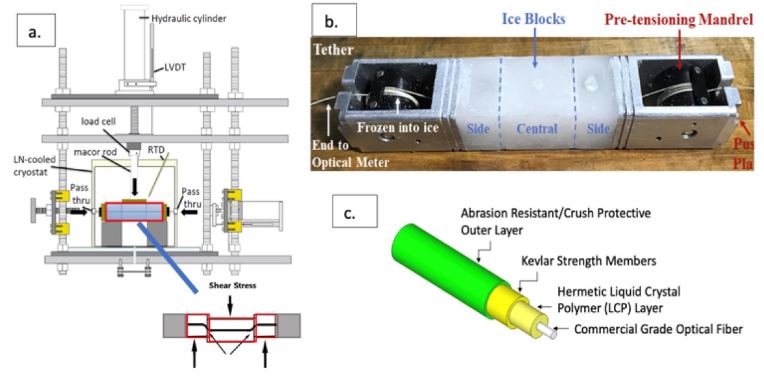
The shear tests showed promise. According to a press release, the "... results demonstrated a surprisingly high level of tether robustness across the range of temperatures and ice fault slip velocities expected on ocean worlds like Europa and Enceladus."
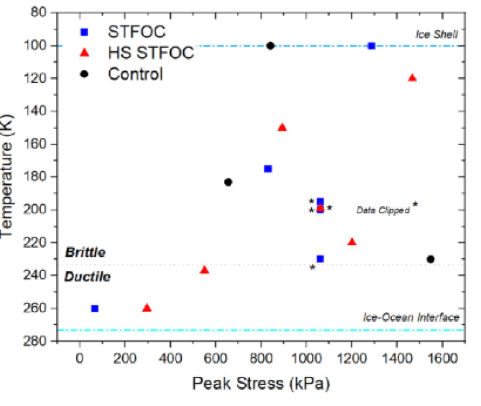
While the cables performed well, they weren't perfect. Despite some signal degradation, they survived the simulated conditions and transmitted data without interruption. There was also minor damage on the outer layer of one of the cables under the coldest conditions.
The study simulated the chaotic and non-uniform nature of the ice that likely exists at Europa and on other icy moons. The press release describes these conditions as "... crudely broken and imperfectly planar sliding ice interfaces..." The lab simulations also confirmed how "... the frictional stability of ice depends on temperature and fault slip velocity."
The fact that the cables kept transmitting data even after damage to the outer layer shows that the design has promise, even though it needs work.
But the tests also showed that the cables can be used as sensors independently, without acting as a tether. "By characterizing data transmission in these conditions, the tests show that tethers could potentially serve as science instruments to detect ice-quakes and establish the thermal profile of the ice shell." Characterizing the ice shell's thermal profile is critical because it won't be uniform. Instead, the "... uppermost and lowest portions of the ice shell slide smoothly (and slowly), whereas, at a mid-range in temperature and depth, icy faults could initiate stick-slip, rapid ice-quake events," the press release says.
While orbiter missions are in the planning phase, there's no clear timeline for a surface mission, let alone a subsurface mission.
There could be intermediary missions between the upcoming orbiter missions and a tunnelling robot. It's possible that the type of cables the team is testing will be part of an intermediary mission. As the lab studies show, they could be used as sensors to measure the ice at shallow depths to characterize the ice, provided there's a method to embed them. The STI team is also developing hardy RF sensors for use on oceanic cryomoons. A less robust tunnelling device could deploy a string of them at greater and greater depths before committing to a full-featured tunnelling robot that explores the ocean itself.
Moons like Europa and Enceladus are environments like no other. Not only because of the prospects for life in their salty, subsurface oceans but because of the complex solutions needed to overcome the barriers to exploration. A mission below Europa's icy shell is still a long way off, but the target is too intriguing to ignore.