
Technical challenges abound when doing space exploration. Some areas are so remote or isolated that engineers need to build a special purpose-made vehicle to visit them. That is certainly the case for some of the more remote parts of the moon - especially the as-yet unexplored caves on the moon. Now a graduate student at the Ecole Polytechnique Federale de Lausanne (EPFL) seems to have developed just such an access system.
Those lunar caves were initially carved by lava tubes but have remained untouched for millions of years. Yet they have distinct advantages. They are a relatively consistent temperature, and while it is on the cold side of what humans can handle (-30 C), it is undoubtedly better than the wicked temperature swings on the lunar surface, which varies between -150 C at night at 150 C during the day. Also, the regolith over top of the caves acts as an effective shield against the radiation that constantly blasts the lunar surface. In short, these caves could potentially make an excellent starting point for a lunar base.
But, despite being discovered a decade ago, we still know very little about these caves. To use them, we'll have to know more, and the best way to do so is to send some robots in our stead. Some of these caves are over 100 m deep, and sending a lander directly into them would prove at least technically infeasible if not impossible. So engineers had to come up with a way of lowering the exploratory robots into the caves without breaking them.
UT video discussing lava tubes.That task fell to Lucas Froissart, a graduate student at EPFL who also had an internship during his Master's program with JAXA - the Japanese space agency responsible for designing the robots themselves. Unfortunately, Mr. Froissart's internship coincided with the Covid-19 pandemic, so he wasn't able to spend any time in Japan. But, like many an isolated worker, he spent time collaborating with his JAXA colleagues on video conferences.
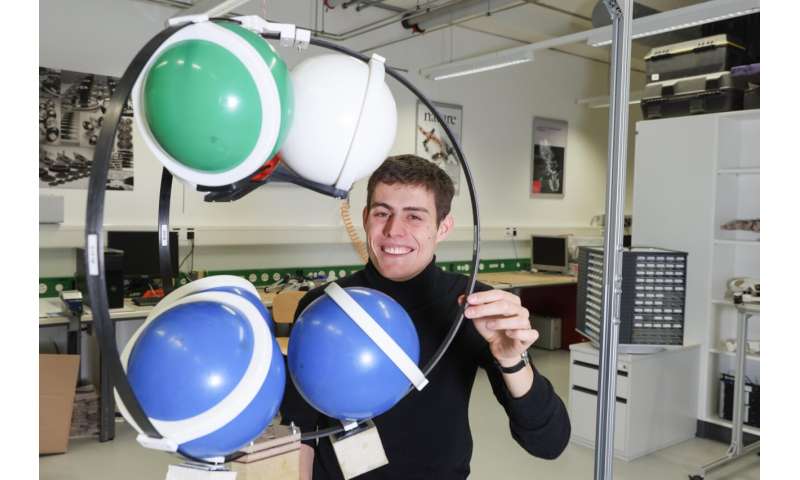
One disadvantage of video conferences is they don't let you get a good enough look at any physical things that might be key to your work. Froissart knew he was supposed to design a mechanism that would launch six robots into a cave upon falling from a height into the cave's depths. But all he knew about the robots themselves were that they were about the size, shape, weight, and rigidity of a gymnastic ball.
So Froissart did what any good engineer would do and went out and bought some gym balls to test his new design. Specifically, he was tasked with building an exoskeleton that would propel three of six robots far away from the landing spot of the exoskeleton itself while depositing the other three ball-shaped robots close by. He would also have to contend with something else it is hard to simulate on Earth's surface - lunar gravity.

Froissart calculated that to simulate a 100 m drop into a lunar cave, he would have to drop his device 20 m to the Earth's surface. That is still a significant height, but he was struck by an innovative thought on a walk one day.
That walk happened to take him past a construction site next to EPFL's campus. The site's manager allowed the Froissart to use one of the site's scaffolds to drop test his device and even dumped some sand at the bottom of the scaffold to simulate regolith at the bottom of the cave. It didn't work the first, second, or hundredth time, as with most innovative projects. But it did eventually work, and Froissart provided his JAXA colleagues with a thoroughly tested exoskeleton that would propel three spherical robots a few meters away while depositing three more at the landing site, after having had been dropped a hundred meters or more into a lunar cave.
Even with that task done, there is still more to do before any robots are probing around lunar caves. The robots themselves aren't entirely tested yet, nor do they have any way of successfully ending up where they could be dropped into a cave system. But plenty of engineers and scientists are still working on the problem. Froissart himself isn't one of those, though he is still involved in space exploration. He will be building satellites and rocket nose cones in Zurich and hopes to see his exoskeleton deposit real robots into a lunar cave one day.
Learn More:
EPFL - Launching robots into lunar caves
UT - ESA is Working on a Mission to Explore Caves on the Moon
UT - One Idea for a Lunar Lava Tube Explorer
UT - Lava Tubes on the Moon and Mars are Really, Really Big. Big Enough to Fit an Entire Planetary Bas e
Lead Image:
An exploration robot lights up a cave in an artist's conception.
Credit - EPFL
