On May 22nd, 2021, the Zhurong rover - part of Tianwen-1, China's first mission to Mars - descended from its lander and drove on the Martian surface for the first time. According to the mission's official social media account, the rover drove down its descent ramp from the Tianwen-1 lander at 10:40 a.m. Beijing time (07:40 p.m. PDT; 10:40 p.m. EDT) and placed its wheels upon the surface of Mars.
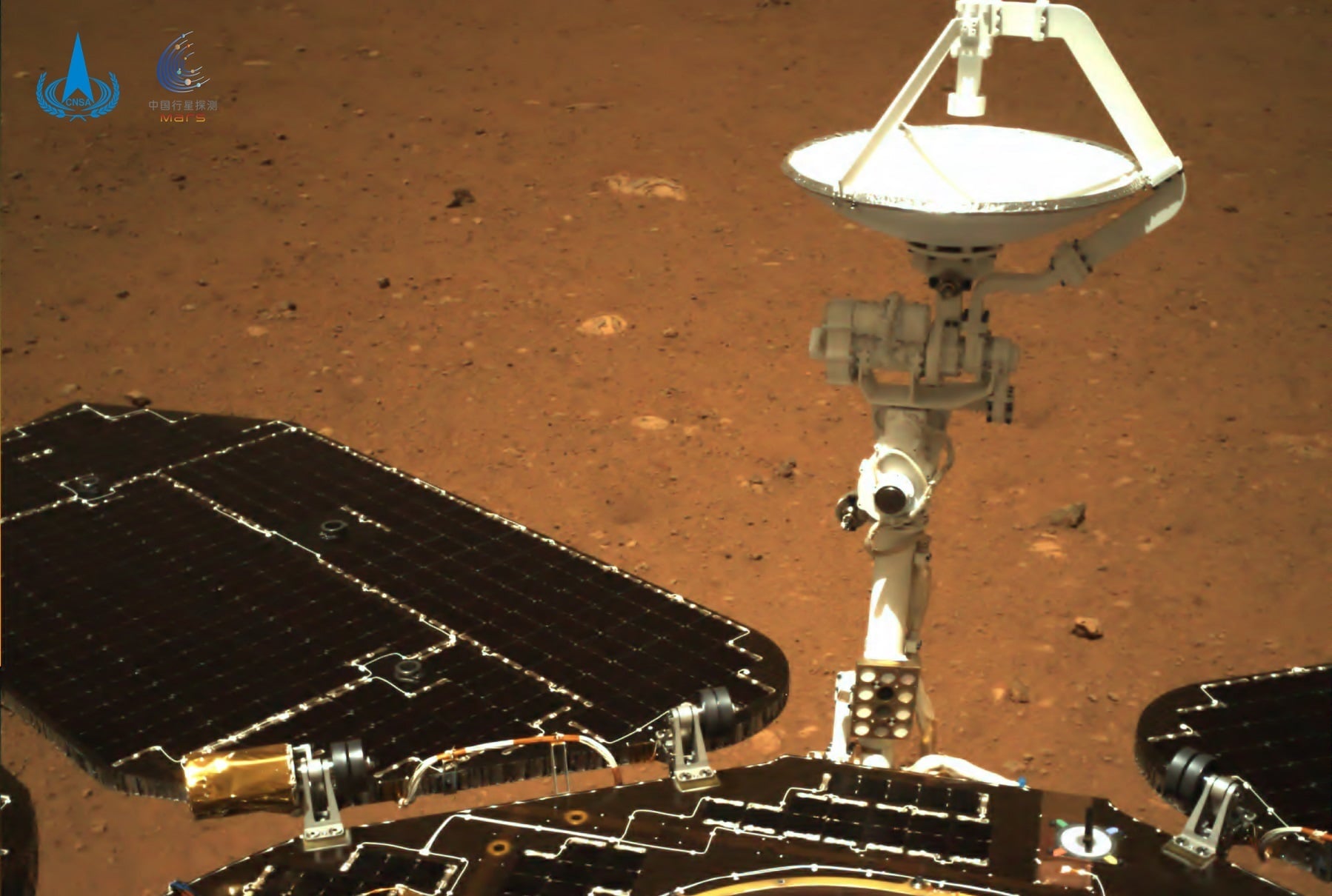
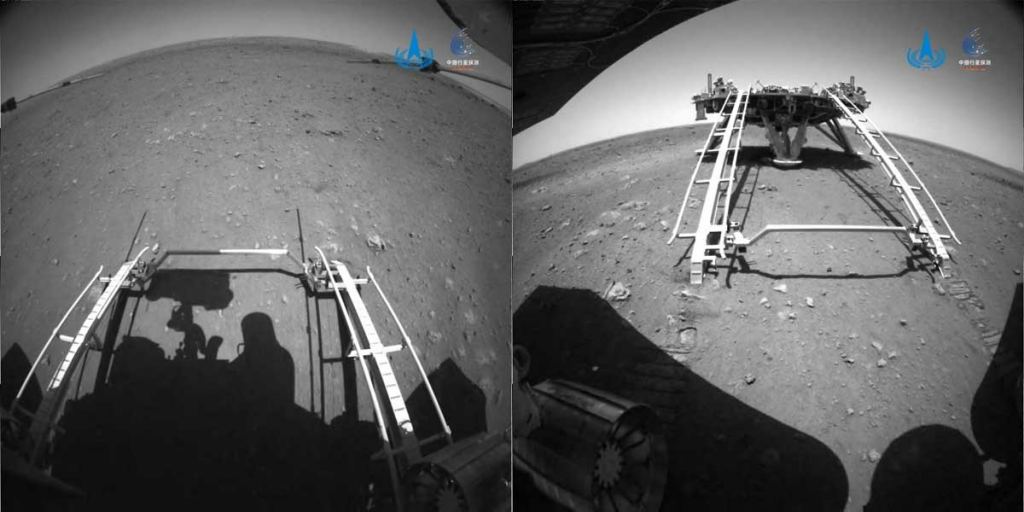
Mission controllers were treated to a video taken by the rover shortly thereafter, which showed the empty landing platform with its descent ramp extended. This comes about a week after the first images were taken by the rover (released on May 19th) that showed surface from the lander and the descent ramp deployed in front of it. The rover has now commenced science operations, which currently involve exploring its landing site.
This is the second milestone achieved by the China National Space Agency (CNSA) in recent weeks, the first being the successful landing of the Tianwen-1 lander on May 14th. This made China the third nation to send a robotic mission to the surface of Mars, the others being the United States and the former Soviet Union. The Soviets were the first to land with the *Mars 2* mission (1971), but communications were lost with the lander seconds later.
On top of that, China is now the first nation to orbit, land, and deploy a rover as part of its first mission to Mars. Whereas all other nations - the US, Russia, the EU, and India - began by sending orbiters, then landers, then orbiters, landers, and rovers, China has pulled off all three with its very first mission. Equipped with a suite of six scientific instruments, Zurong will spend a total of 90 days gathering data on the Martian surface. These include:
- Multi-Spectrum Camera (MSCam) - a radiometer that will capture different wavelengths of radiation on the surface
- Navigation and Topography Cameras (NaTeCam) - high-resolution cameras for mapping out the Martian surface
- Rover ground-Penetrating Radar (RoPeR) - for imaging features about 100 m (330 ft) beneath the Martian surface
- Mars Surface Magnetic Field Detector (RoMAG) for surveying Mars' variable magnetic field
- Mars Meteorological Measurement Instrument (MMMI) - aka. Mars Climate Station (MCS), this instrument includes a thermometer, anemometer, and pressure sensor
- Mars Surface Compound Detector (MarsSCoDe) - a spectrometer capable of conducting infrared and laser-induced breakdown spectroscopy
The objectives of the Tianwen-1 mission include characterizing the internal structure of Mars, the composition of its surface material, its climate and environment, the distribution of water ice, the planet's morphology and geology, the planet's variable magnetic field, ionosphere, and other key characteristics. In essence, Zhurong will be joining the three NASA surface missions to learn more about what Mars once looked like.
This includes studying features that formed in the presence of water and searching for possible indications of past life. It is for these very reasons that the Zhurong and its lander set down in Utopia Planitia, a plains region in the Northern Lowlands that was once covered by an ocean that enclosed much of the northern hemisphere. Utopia Planitia is also where NASA's *Viking 2* lander set down on September 3rd, 1976, to search for biosignatures.
The rover will also be looking for indications of what happened to Mars' surface water, which scientists now theorize may have escaped underground. Finding existing caches of water and ice underground will also help pave the way for human exploration, as well as the creation of long-term habitats on the surface. The orbiter will monitor Zhurong and operate as a relay to provide a steady information conduit to the mission controllers back on Earth.
According to China Space News (quoted by Reuters), Zhurong has spent its first three days away from the lander exploring the surface in slow and small intervals - never venturing more than 10 m (33 ft) at a time. "The slow progress of the rover was due to the limited understanding of the Martian environment, so a relatively conservative working mode was specially designed," said Jia Yang, an engineer and member of the mission team. Jia added that the pace may increase as the mission continues.
Zhurong is currently one of four missions exploring the Martian surface, the others being NASA's Perseverance rover, Curiosity rover, and Insight lander. Next year, they will be joined by the ExoMars 2022 mission that will consist of Roscosmos' Kazachok lander and the ESA's Rosalind Franklin* rover. By 2027-8, the elements that make up the Mars Sample Return* are scheduled to arrive (a lander, rover, ascent vehicle, and Earth-return orbiter).
Back in February, the Emirates Mars Mission* (aka. Hope) probe arrived in orbit, becoming the first mission sent by an Arab (or Muslim majority) nation to the Red Planet. It is now one of six orbiter missions, which include NASA's 2001 Mars Odyssey, Mars Reconnaissance Orbiter* (MRO), MAVEN, and the ESA's Mars Express* and ExoMars 2016 Trace Gas Orbiter* (TGO).
These missions will carry on in the quest to learn more about Mars' past and potential habitability. They will also help pave the way for crewed missions to the Red Planet, which are expected to begin sometime in the 2030s. The data obtained from all surface, orbiter, robotic, and crewed missions to Mars will also contribute to our overall understanding of how the rocky planets of our Solar System formed and evolved over the course of billions of years.
With any luck, we might even learn a thing or two about when and how life first emerged in our little corner of the cosmos. That slice of knowledge could also go a long way toward helping us find life beyond the Solar System someday.
*Further Reading: Reuters, Parabolic Arc*