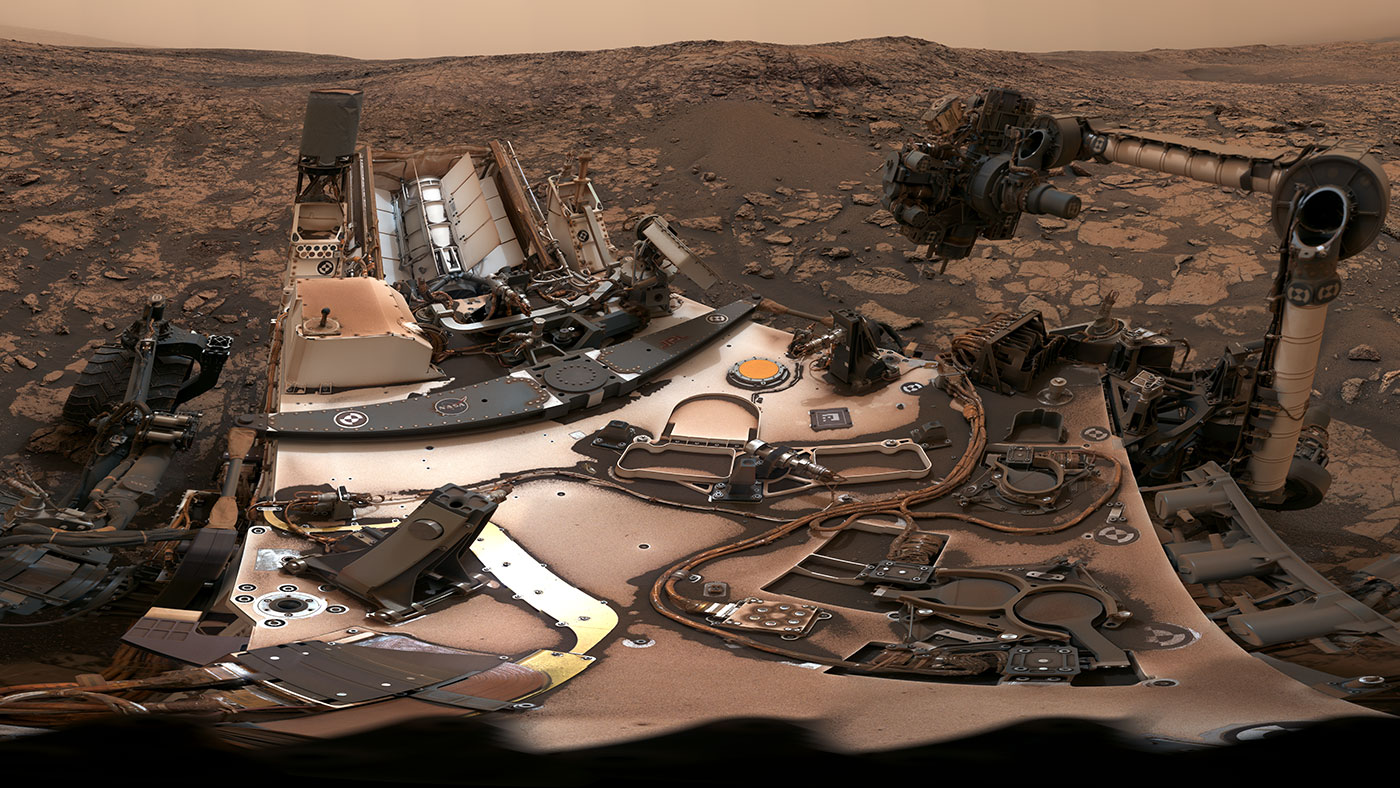
This 360-degree panorama was taken on Aug. 9 by NASA's Curiosity rover at its location on Vera Rubin Ridge. Credit: NASA/JPL-Caltech/MSSS
Ever since it landed on the Red Planet in 2012, the Curiosity rover has showed no signs of slowing down! For the past six years, it has ventured across the Gale Crater, scaled Mount Sharp, and taken numerous drill samples. And in the process, it has found evidence that liquid water (and possibly even life) once existed on the Martian surface.
It has also taken many breathtaking pictures that have catalogued its progress. Last month (on Aug. 9th), the rover took another 360-degree panoramic photo of its location. In addition to showing how the skies were still darkened by the fading dust storm and the rover’s dust-covered body, the picture also captured and the site where the latest drill sample was obtained.
NASA’s Curiosity rover raised robotic arm with drill pointed skyward while exploring Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater - backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images taken on Sol 1833, Oct. 2, 2017 and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover raised robotic arm with drill pointed skyward while exploring Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater – backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images taken on Sol 1833, Oct. 2, 2017 and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
5 years after a heart throbbing Martian touchdown, Curiosity is climbing Vera Rubin Ridge in search of “aqueous minerals” and “clays” for clues to possible past life while capturing “truly breathtaking” vistas of humongous Mount Sharp – her primary destination – and the stark eroded rim of the Gale Crater landing zone from ever higher elevations, NASA scientists tell Universe Today in a new mission update.
“Curiosity is doing well, over five years into the mission,” Michael Meyer, NASA Lead Scientist, Mars Exploration Program, NASA Headquarters told Universe Today in an interview.
“A key finding is the discovery of an extended period of habitability on ancient Mars.”
The car-sized rover soft landed on Mars inside Gale Crater on August 6, 2012 using the ingenious and never before tried “sky crane” system.
A rare glimpse of Curiosity’s arm and turret mounted skyward pointing drill is illustrated with our lead mosaic from Sol 1833 of the robot’s life on Mars – showing a panoramic view around the alien terrain from her current location in October 2017 while actively at work analyzing soil samples.
“Your mosaic is absolutely gorgeous!’ Jim Green, NASA Director Planetary Science Division, NASA Headquarters, Washington D.C., told Universe Today
“We are at such a height on Mt Sharp to see the rim of Gale Crater and the top of the mountain. Truly breathtaking.”
The rover has ascended more than 300 meters in elevation over the past 5 years of exploration and discovery from the crater floor to the mountain ridge. She is driving to the top of Vera Rubin Ridge at this moment and always on the lookout for research worthy targets of opportunity.
Additionally, the Sol 1833 Vera Rubin Ridge mosaic, stitched by the imaging team of Ken Kremer and Marco Di Lorenzo, shows portions of the trek ahead to the priceless scientific bounty of aqueous mineral signatures detected by spectrometers years earlier from orbit by NASA’s fleet of Red Planet orbiters.
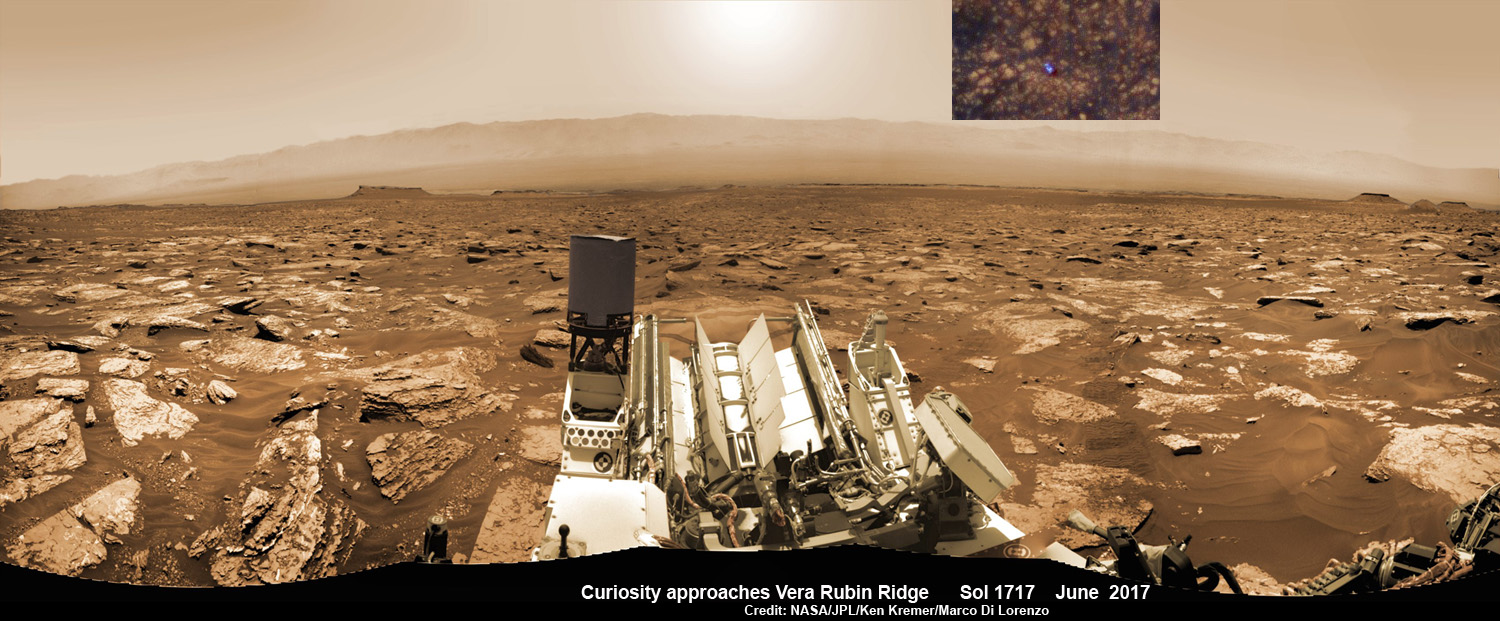
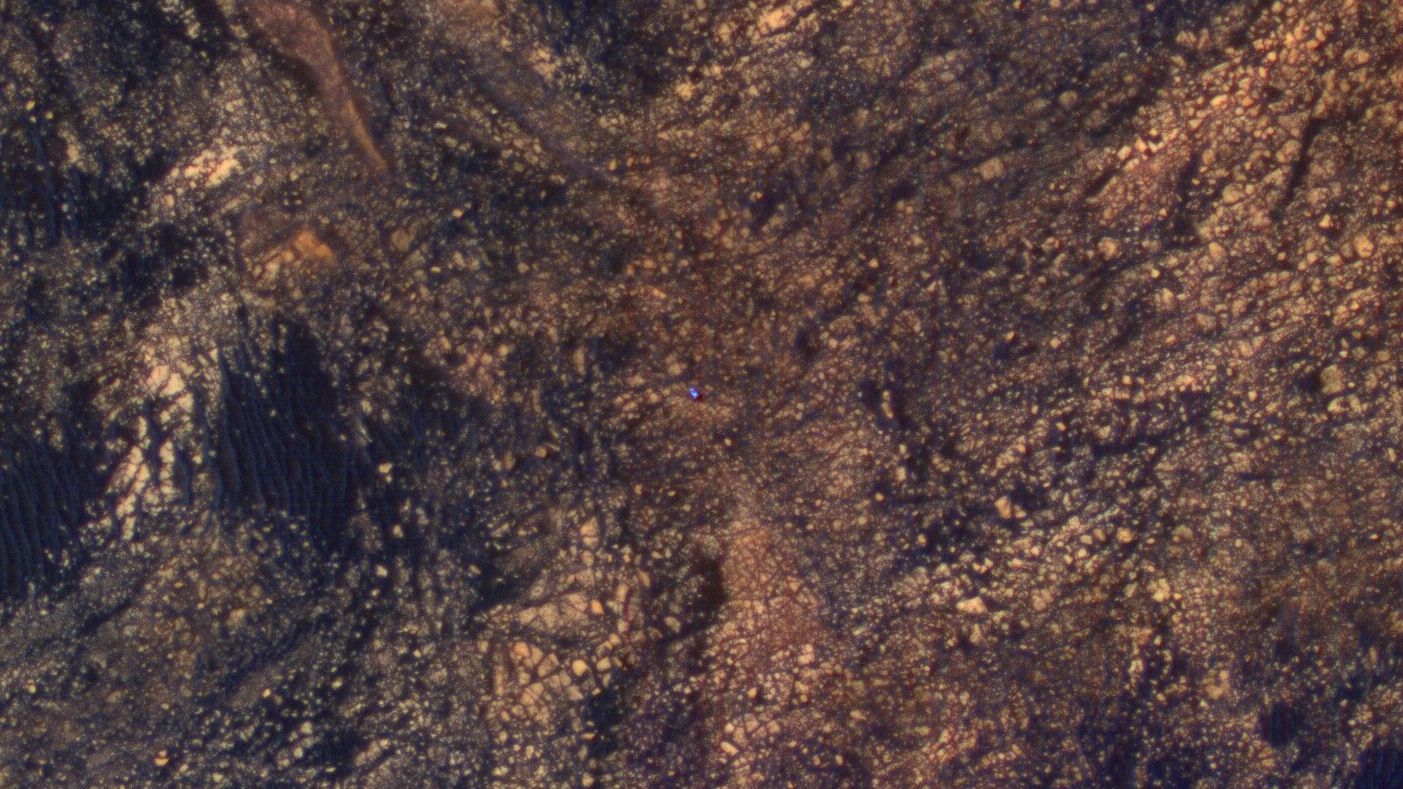
NASA’s Curiosity rover as seen simultaneously on Mars surface and from orbit on Sol 1717, June 5, 2017. The robot snapped this self portrait mosaic view while approaching Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater – backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images and colorized. Inset shows overhead orbital view of Curiosity (blue feature) amid rocky mountainside terrain taken the same day by NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“Curiosity is on Vera Rubin Ridge (aka Hematite Ridge) – it is the first aqueous mineral signature that we have seen from space, a driver for selecting Gale Crater,” NASA HQ Mars Lead Scientist Meyer elaborated.
“And now we have access to it.”
The Sol 1833 photomosaic illustrates Curiosity maneuvering her 7 foot long (2 meter) robotic arm during a period when she was processing and delivering a sample of the “Ogunquit Beach” for drop off to the inlet of the CheMin instrument earlier in October. The “Ogunquit Beach” sample is dune material that was collected at Bagnold Dune II this past spring.
The sample drop is significant because the drill has not been operational for some time.
“Ogunquit Beach” sediment materials were successfully delivered to the CheMin and SAM instruments over the following sols and multiple analyses are in progress.
To date three CheMin integrations of “Ogunquit Beach” have been completed. Each one brings the mineralogy into sharper focus.
Researchers used the Mastcam on NASA’s Curiosity Mars rover to gain this detailed view of layers in “Vera Rubin Ridge” from just below the ridge. The scene combines 70 images taken with the Mastcam’s right-eye, telephoto-lens camera, on Aug. 13, 2017. Credit: NASA/JPL-Caltech/MSSS
What’s the status of the rover health at 5 years, the wheels and the drill?
“All the instruments are doing great and the wheels are holding up,” Meyer explained.
“When 3 grousers break, 60% life has been used – this has not happened yet and they are being periodically monitored. The one exception is the drill feed (see detailed update below).”
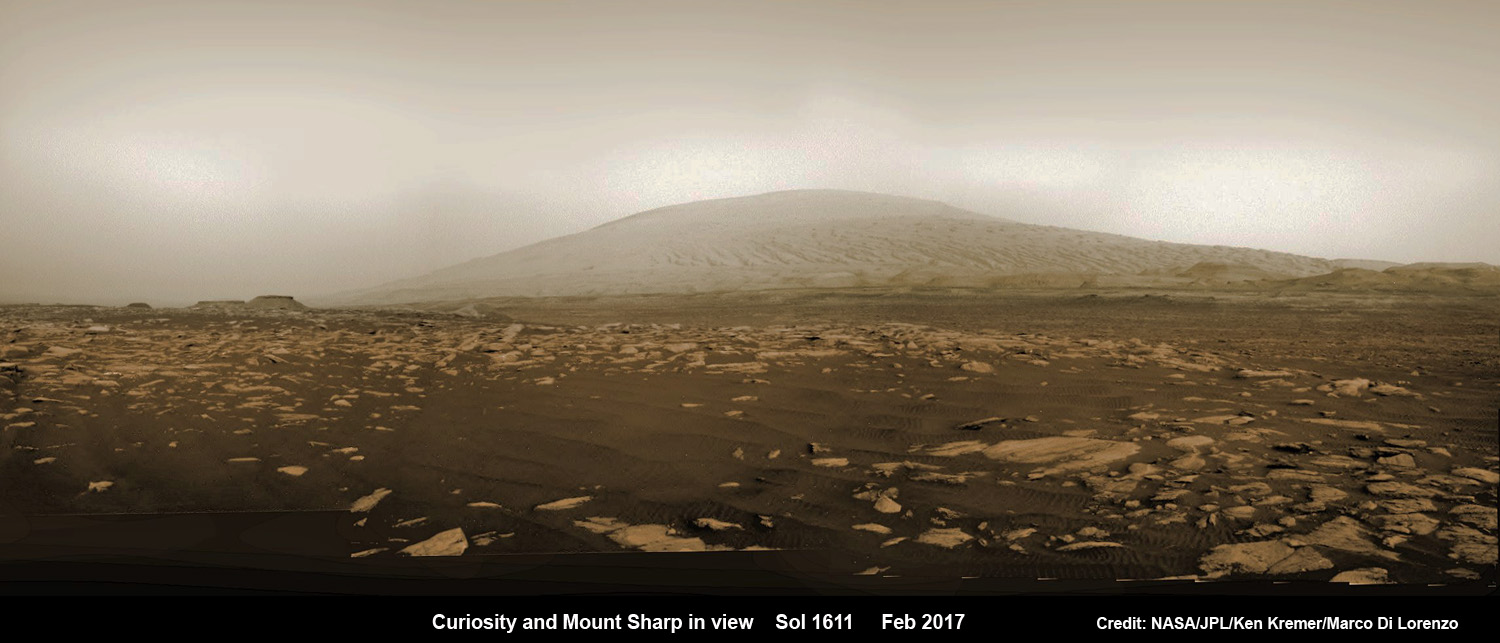
NASA’s Curiosity rover explores sand dunes inside Gale Crater with Mount Sharp in view on Mars on Sol 1611, Feb. 16, 2017, in this navcam camera mosaic, stitched from raw images and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s 1 ton Curiosity Mars Science Laboratory (MSL) rover is now closer than ever to the mineral signatures that were the key reason why Mount Sharp was chosen as the robots landing site years ago by the scientists leading the unprecedented mission.
Along the way from the ‘Bradbury Landing’ zone to Mount Sharp, six wheeled Curiosity has often been climbing. To date she has gained over 313 meters (1027 feet) in elevation – from minus 4490 meters to minus 4177 meters today, Oct. 19, 2017, said Meyer.
The low point was inside Yellowknife Bay at approx. minus 4521 meters.
VRR alone stands about 20 stories tall and gains Curiosity approx. 65 meters (213 feet) of elevation to the top of the ridge. Overall the VRR traverse is estimated by NASA to take drives totaling more than a third of a mile (570 m).
Curiosity images Vera Rubin Ridge during approach backdropped by Mount Sharp. This navcam camera mosaic was stitched from raw images taken on Sol 1726, June 14, 2017 and colorized. Credit: NASA/JPL/Marco Di Lorenzo/Ken Kremer/kenkremer.com
“Vera Rubin Ridge” or VRR is also called “Hematite Ridge.” It’s a narrow and winding ridge located on the northwestern flank of Mount Sharp. It was informally named earlier this year in honor of pioneering astrophysicist Vera Rubin.
The intrepid robot reached the base of the ridge in early September.
The ridge possesses steep cliffs exposing stratifications of large vertical sedimentary rock layers and fracture filling mineral deposits, including the iron-oxide mineral hematite, with extensive bright veins.
VRR resists erosion better than the less-steep portions of the mountain below and above it, say mission scientists.
Curiosity rover raises robotic arm high while scouting the Bagnold Dune Field and observing dust devils inside Gale Crater on Mars on Sol 1625, Mar. 2, 2017, in this navcam camera mosaic stitched from raw images and colorized. Note: Wheel tracks at right, distant crater rim in background. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
What’s ahead for Curiosity in the coming weeks and months exploring VRR before moving onward and upwards to higher elevation?
“Over the next several months, Curiosity will explore Vera Rubin Ridge,” Meyer replied.
“This will be a big opportunity to ground-truth orbital observations. Of interest, so far, the hematite of VRR does not look that different from what we have been seeing all along the Murray formation. So, big question is why?”
“The view from VRR also provides better access to what’s ahead in exploring the next aqueous mineral feature – the clay, or phyllosilicates, which can be indicators of specific environments, putting constraints on variables such as pH and temperature,” Meyer explained.
The clay minerals or phyllosilicates form in more neutral water, and are thus extremely scientifically interesting since pH neutral water is more conducive to the origin and evolution of Martian microbial life forms, if they ever existed.
How far away are the clays ahead and when might Curiosity reach them?
“As the crow flies, the clays are about 0.5 km,” Meyer replied. “However, the actual odometer distance and whether the clays are where we think they are – area vs. a particular location – can add a fair degree of variability.”
The clay rich area is located beyond the ridge.
Over the past few months Curiosity make rapid progress towards the hematite-bearing location of Vera Rubin Ridge after conducting in-depth exploration of the Bagnold Dunes earlier this year.
“Vera Rubin Ridge is a high-standing unit that runs parallel to and along the eastern side of the Bagnold Dunes,” said Mark Salvatore, an MSL Participating Scientist and a faculty member at Northern Arizona University, in a mission update.
“From orbit, Vera Rubin Ridge has been shown to exhibit signatures of hematite, an oxidized iron phase whose presence can help us to better understand the environmental conditions present when this mineral assemblage formed.”
Curiosity is using the science instruments on the mast, deck and robotic arm turret to gather detailed research measurements with the cameras and spectrometers. The pair of miniaturized chemistry lab instruments inside the belly – CheMin and SAM – are used to analyze the chemical and elemental composition of pulverized rock and soil gathered by drilling and scooping selected targets during the traverse.
A key instrument is the drill which has not been operational. I asked Meyer for a drill update.
“The drill feed developed problems retracting (two stabilizer prongs on either side of the drill retract, controlling the rate of drill penetration),” Meyer replied.
“Because the root cause has not been found (think FOD) and the concern about the situation getting worse, the drill feed has been retracted and the engineers are working on drilling without the stabilizing prongs.”
“Note, a consequence is that you can still drill and collect sample but a) there is added concern about getting the drill stuck and b) a new method of delivering sample needs to be developed and tested (the drill feed normally needs to be moved to move the sample into the chimera). One option that looks viable is reversing the drill – it does work and they are working on the scripts and how to control sample size.”
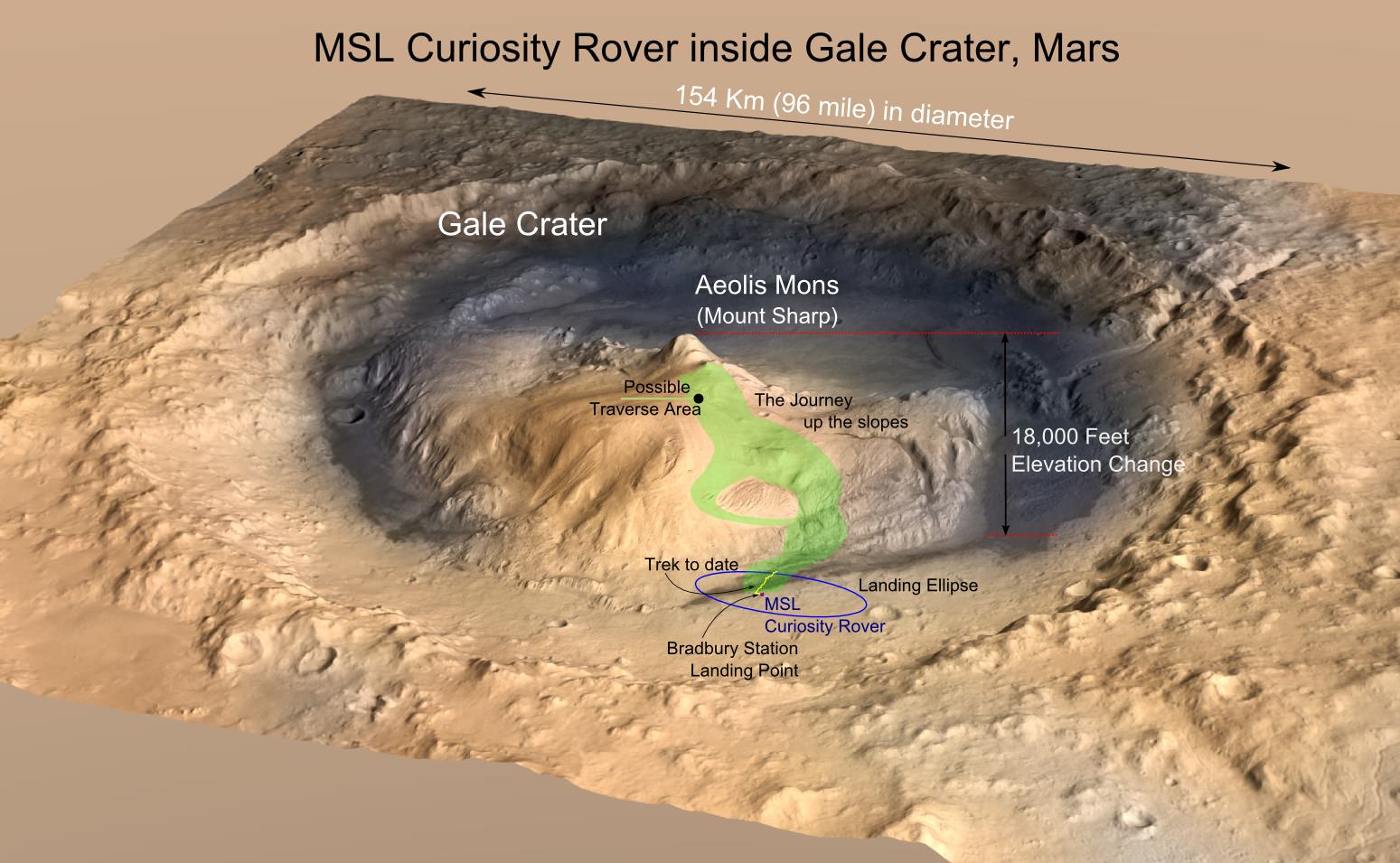
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rover’s long term scientific expedition on the Red Planet.
“Lower Mount Sharp was chosen as a destination for the Curiosity mission because the layers of the mountain offer exposures of rocks that record environmental conditions from different times in the early history of the Red Planet. Curiosity has found evidence for ancient wet environments that offered conditions favorable for microbial life, if Mars has ever hosted life,” says NASA.
Stay tuned. In part 2 we’ll discuss the key findings from Curiosity’s first 5 years exploring the Red Planet.
As of today, Sol 1850, Oct. 19, 2017, Curiosity has driven over 10.89 miles (17.53 kilometers) since its August 2012 landing inside Gale Crater from the landing site to the ridge, and taken over 445,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
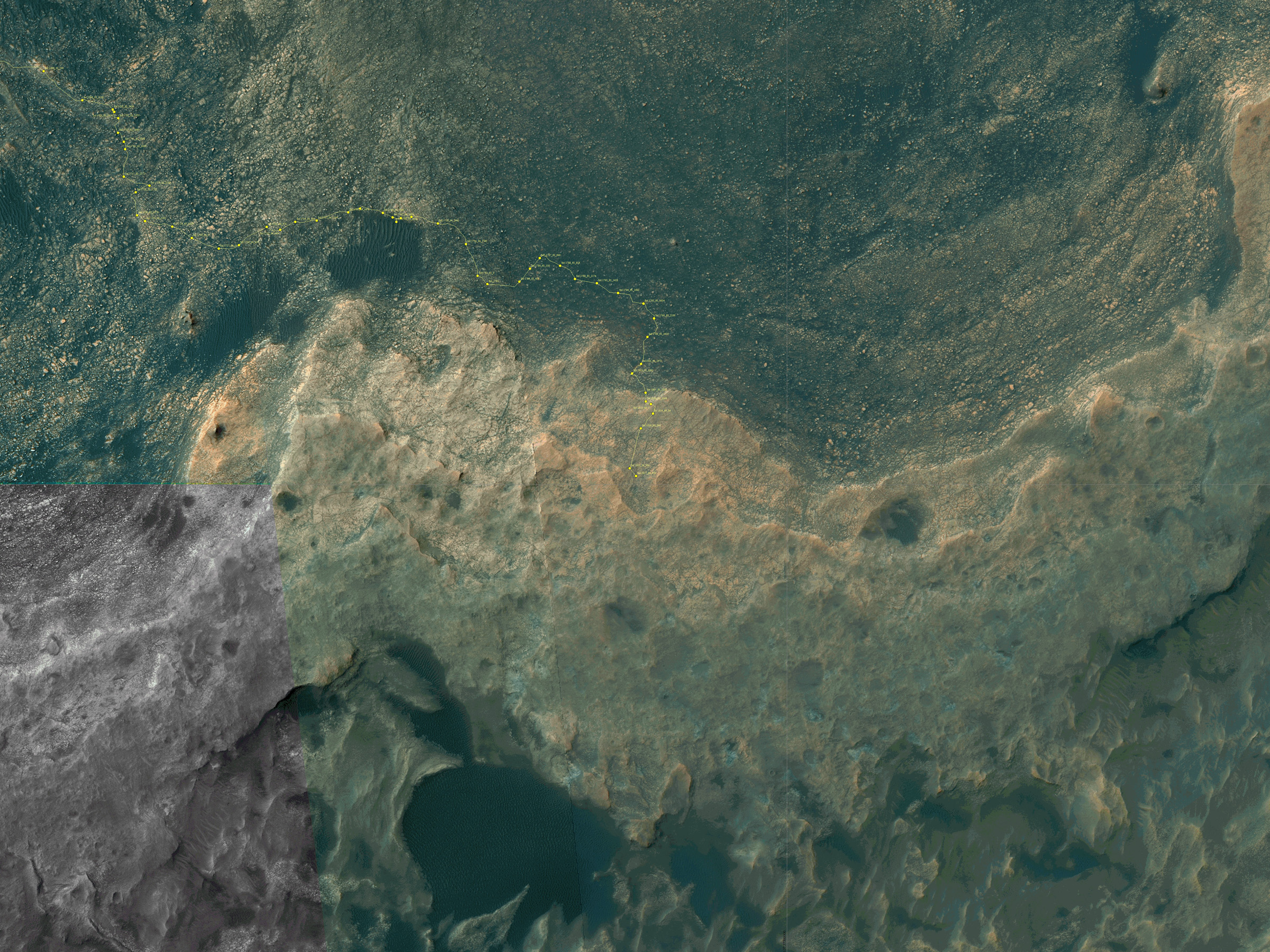
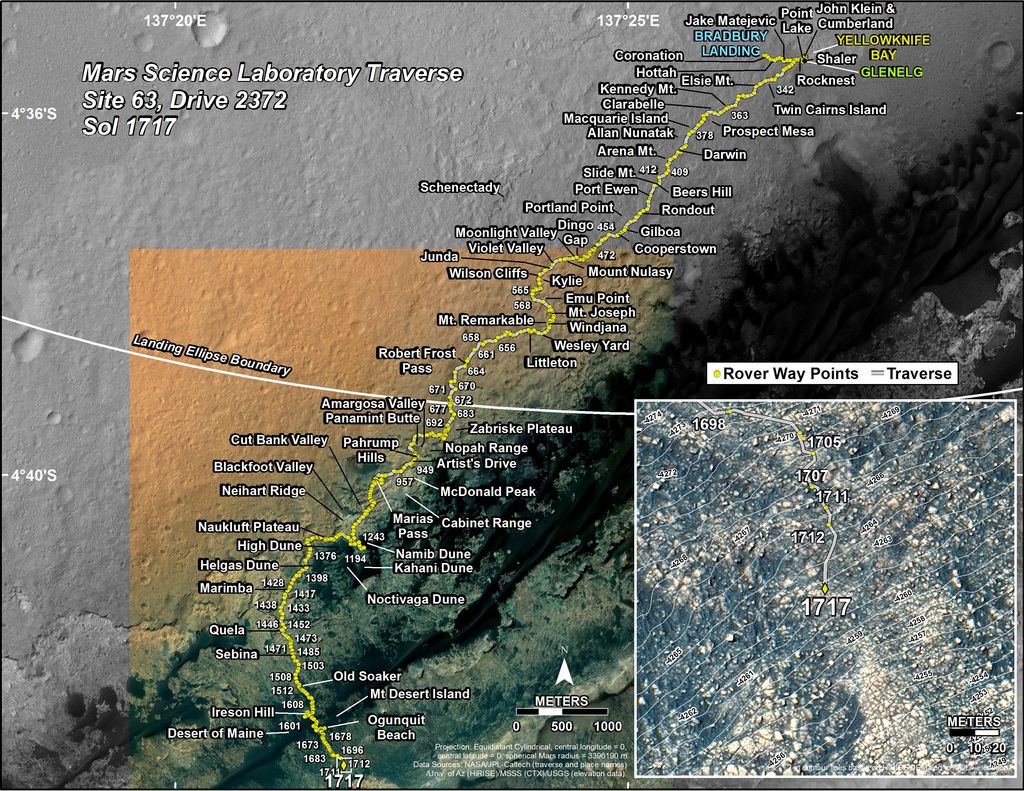
Map shows route driven by NASA’s Mars rover Curiosity through Sol 1827 of the rover’s mission on Mars (September 27, 2017). Numbering of the dots along the line indicate the sol number of each drive. North is up. Since touching down in Bradbury Landing in August 2012, Curiosity has driven 10.84 miles (17.45 kilometers). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/UACuriosity’s Traverse Map Through Sol 1717. This map shows the route driven by NASA’s Mars rover Curiosity through the 1717 Martian day, or sol, of the rover’s mission on Mars (June 05, 2017). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL-Caltech/Univ. of Arizona
NASA’s Curiosity rover as seen simultaneously on Mars surface and from orbit on Sol 1717, June 5, 2017. The robot snapped this self portrait mosaic view while approaching Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater - backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images and colorized. Inset shows overhead orbital view of Curiosity (blue feature) amid rocky mountainside terrain taken the same day by NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover as seen simultaneously on Mars surface and from orbit on Sol 1717, June 5, 2017. The robot snapped this self portrait mosaic view while approaching Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater – backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images and colorized. Inset shows overhead orbital view of Curiosity (blue feature) amid rocky mountainside terrain taken the same day by NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
You can catch a glimpse of what its like to see NASA’s Curiosity Mars rover simultaneously high overhead from orbit and trundling down low across the Red Planet’s rocky surface as she climbs the breathtaking terrain of Mount Sharp – as seen in new images from NASA we have stitched together into a mosaic view showing the perspective views; see above.
Earlier this month on June 5, researchers commanded NASA’s Mars Reconnaissance Orbiter (MRO) to image the car sized Curiosity rover from Mars orbit using the spacecrafts onboard High Resolution Imaging Science Experiment (HiRISE) telescopic camera during Sol 1717 of her Martian expedition – see below.
HiRISE is the most powerful telescope ever sent to Mars.
And as she does nearly every Sol, or Martian day, Curiosity snapped a batch of new images captured from Mars surface using her navigation camera called navcam – likewise on Sol 1717.
Since NASA just released the high resolution MRO images of Curiosity from orbit, we assembled together the navcam camera raw images taken simultaneously on June 5 (Sol 1717), in order to show the actual vista seen by the six wheeled robot from a surface perspective on the same day.
The lead navcam photo mosaic shows a partial rover selfie backdropped by the distant rim of Gale Crater – and was stitched together by the imaging team of Ken Kremer and Marco Di Lorenzo.
The feature that appears bright blue at the center of this scene is NASA’s Curiosity Mars rover amid tan rocks and dark sand on Mount Sharp, as viewed by the HiRISE camera on NASA’s Mars Reconnaissance Orbiter on June 5, 2017. The rover is about 10 feet long and not really as blue as it looks here. The image was taken as Curiosity was partway between its investigation of active sand dunes lower on Mount Sharp, and “Vera Rubin Ridge,” a destination uphill where the rover team intends to examine outcrops where hematite has been identified from Mars orbit. Credits: NASA/JPL-Caltech/Univ. of Arizona
Right now NASA’s Curiosity Mars Science Laboratory (MSL) rover is approaching her next science destination named “Vera Rubin Ridge” while climbing up the lower reaches of Mount Sharp, the humongous mountain that dominates the rover’s landing site inside Gale Crater.
“When the MRO image was taken, Curiosity was partway between its investigation of active sand dunes lower on Mount Sharp, and “Vera Rubin Ridge,” a destination uphill where the rover team intends to examine outcrops where hematite has been identified from Mars orbit,” says NASA.
“HiRISE has been imaging Curiosity about every three months, to monitor the surrounding features for changes such as dune migration or erosion.”
The MRO image has been color enhanced and shows Curiosity as a bright blue feature. It is currently traveling on the northwestern flank of Mount Sharp. Curiosity is approximately 10 feet long and 9 feet wide (3.0 meters by 2.8 meters).
“The exaggerated color, showing differences in Mars surface materials, makes Curiosity appear bluer than it really looks. This helps make differences in Mars surface materials apparent, but does not show natural color as seen by the human eye.”
See our mosaic of “Vera Rubin Ridge” and Mount Sharp below.
Curiosity images Vera Rubin Ridge during approach backdropped by Mount Sharp. This navcam camera mosaic was stitched from raw images taken on Sol 1726, June 14, 2017 and colorized. Credit: NASA/JPL/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Curiosity is making rapid progress towards the hematite-bearing location of Vera Rubin Ridge after conducting in-depth exploration of the Bagnold Dunes earlier this year.
“Vera Rubin Ridge is a high-standing unit that runs parallel to and along the eastern side of the Bagnold Dunes,” says Mark Salvatore, an MSL Participating Scientist and a faculty member at Northern Arizona University, in a new mission update.
“From orbit, Vera Rubin Ridge has been shown to exhibit signatures of hematite, an oxidized iron phase whose presence can help us to better understand the environmental conditions present when this mineral assemblage formed.”
Curiosity will use her cameras and spectrometers to elucidate the origin and nature of Vera Rubin Ridge and potential implications or role in past habitable environments.
“The rover will turn its cameras to Vera Rubin Ridge for another suite of high resolution color images, which will help to characterize any observed layers, fractures, or geologic contacts. These observations will help the science team to determine how Vera Rubin Ridge formed and its relationship to the other geologic units found within Gale Crater.”
To reach Vera Rubin Ridge, Curiosity is driving east-northeast around two small patches of dunes just to the north. She will then turn “southeast and towards the location identified as the safest place for Curiosity to ascend the ridge. Currently, this ridge ascent point is approximately 370 meters away.”
Curiosity rover raises robotic arm high while scouting the Bagnold Dune Field and observing dust devils inside Gale Crater on Mars on Sol 1625, Mar. 2, 2017, in this navcam camera mosaic stitched from raw images and colorized. Note: Wheel tracks at right, distant crater rim in background. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
“Lower Mount Sharp was chosen as a destination for the Curiosity mission because the layers of the mountain offer exposures of rocks that record environmental conditions from different times in the early history of the Red Planet. Curiosity has found evidence for ancient wet environments that offered conditions favorable for microbial life, if Mars has ever hosted life,” says NASA.
NASA’s Curiosity rover explores sand dunes inside Gale Crater with Mount Sharp in view on Mars on Sol 1611, Feb. 16, 2017, in this navcam camera mosaic, stitched from raw images and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of today, Sol 1733, June 21, 2017, Curiosity has driven over 10.29 miles (16.57 kilometers) since its August 2012 landing inside Gale Crater, and taken over 420,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Learn more about the upcoming SpaceX launch of BulgariaSat 1, recent SpaceX Dragon CRS-11 resupply launch to ISS, NASA missions and more at Ken’s upcoming outreach events at Kennedy Space Center Quality Inn, Titusville, FL:
June 22-24: “SpaceX BulgariaSat 1 launch, SpaceX CRS-11 and CRS-10 resupply launches to the ISS, Inmarsat 5 and NRO Spysat, EchoStar 23, SLS, Orion, Commercial crew capsules from Boeing and SpaceX , Heroes and Legends at KSCVC, ULA Atlas/John Glenn Cygnus launch to ISS, SBIRS GEO 3 launch, GOES-R weather satellite launch, OSIRIS-Rex, Juno at Jupiter, InSight Mars lander, SpaceX and Orbital ATK cargo missions to the ISS, ULA Delta 4 Heavy spy satellite, Curiosity and Opportunity explore Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
Curiosity’s Traverse Map Through Sol 1717. This map shows the route driven by NASA’s Mars rover Curiosity through the 1717 Martian day, or sol, of the rover’s mission on Mars (June 05, 2017). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL-Caltech/Univ. of Arizona
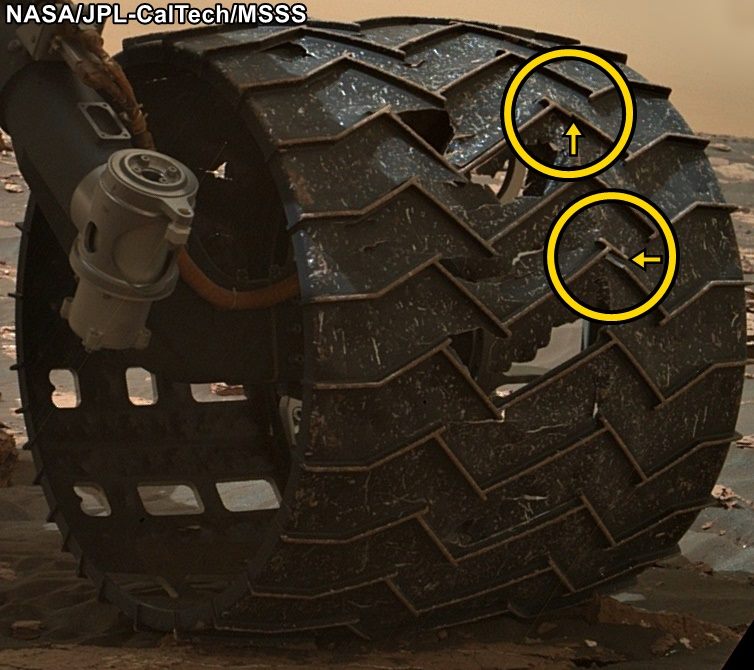
Image taken by the Mars Hand Lens Imager (MAHLI) of Curiosity's wheels on March 19, 2017. Credit: NASA
Since it landed on August 6th, 2012, the Curiosityrover has spent a total of 1644 Sols (or 1689 Earth days) on Mars. And as of March 2017, it has traveled almost 16 km (~10 mi) across the planet and climbed almost a fifth of a kilometer (0.124 mi) uphill. Spending that kind of time on another planet, and traveling that kind of distance, can certainly lead to its share of wear of tear on a vehicle.
That was the conclusion when the Curiosity science team conducted a routine check of the rover’s wheels on Sunday, March 19th, 2017. After examining images taken by the Mars Hand Lens Imager (MAHLI), they noticed two small breaks in the raised treads on the rover’s left middle wheel. These breaks appeared to have happened since late January, when the last routine check of the wheels took place.
To get around, the Curiosity rover relies on six solid aluminum wheels that are 40 cm (16 in) wide. The skin of the wheels is thinner than a US dime, but each contains 19 zigzag-shaped treads that are about 0.75 cm (three-quarters of an inch) thick. These “grousers”, as they are called, bear most of the rover’s weight and provide most of the wheel’s traction.
Close-up image of the broken grousers on Curiosity’s left-middle wheel. Credit: NASA/JPL-Caltech/MSSS
Ever since the rover was forced to cross a stretch of terrain that was studded with sharp rocks in 2013, the Curiosity team has made regular checks on the rover’s wheels using the MAHLI camera. At the time, the rover was moving from the Bradbury Landing site (where it landed in 2012) to the base of Mount Sharp, and traversing this terrain caused holes and dents in the wheels to grow significantly.
However, members of Curiosity’s science team emphasized that this is nothing to be worried about, as it will not affect the rover’s performance or lifespan. As Jim Erickson, the Curiosity Project Manager at NASA’s Jet Propulsion Laboratory, said in a recent NASA press statement:
“All six wheels have more than enough working lifespan remaining to get the vehicle to all destinations planned for the mission. While not unexpected, this damage is the first sign that the left middle wheel is nearing a wheel-wear milestone.”
In addition to regular monitoring, a wheel-longevity testing program was started on Earth in 2013 using identical aluminum wheels. These tests showed that once a wheel got to the point where three of its grousers were broken, it had passed about 60% of its lifespan. However, Curiosity has already driven more than 60% of the total distance needed for it to make it to all of its scientific destinations.
Graphic depicting aspects of the driving distance, elevation, geological units and time intervals of NASA’s Curiosity Mars rover mission, as of late 2016. Credit: NASA/JPL-Caltech
“This is an expected part of the life cycle of the wheels and at this point does not change our current science plans or diminish our chances of studying key transitions in mineralogy higher on Mount Sharp.”
At present, Curiosity is examining sand dunes in the geographical region known as the Murray Buttes formation, which is located on the slope of Mount Sharp. Once finished, it will proceed up higher to a feature known as “Vera Rubin Ridge”, inspecting a layer that is rich in the mineral hematite. From there, it will proceeded to even higher elevations to inspect layers that contain clays and sulfates.
Getting to the farthest destination (the sulfate unit) will require another 6 km (3.7 mi) of uphill driving. However, this is a short distance compared to the kind of driving the rover has already performed. Moreover, the science team has spent the past four years implementing various methods designed to avoid embedded rocks and other potentially hazardous terrain features.
MRO image of Gale Crater illustrating the landing location and trek of the Rover Curiosity. Credits: NASA/JPL, illustration, T.Reyes
It is expected that this drive up Mount Sharp will yield some impressive scientific finds. During its first year on Mars, Curiosity succeeded in gathering evidence in the Gale Crater that showed how Mars once had conditions favorable to life. This included ample evidence of liquid water, all the chemical elements needed for life, and even a chemical source of energy.
By scaling Mount Sharp and examining the layers that were deposited over the course of billions of years, Curiosity is able to examine a living geological record of how the planet has evolved since then. Luckily, the rover’s wheels seem to have more than enough life to make these and (most likely) other scientific finds.