China's Long March 5 rocket sends the Chang'e-5 probe on the first leg of its mission to the moon and back. (CNSA / CLEP Photo)
China’s space program has advanced by leaps and bounds in a relatively short time. However, it has suffered some bad publicity in recent years due to certain “uncontrolled reentries” (aka. crashes). On multiple occasions, spent first stages have fallen back to Earth, posing a potential threat to populated areas and prompting backlash from NASA and the ESA, who claimed China was taking “unnecessary risks.” To curb the risk caused by spent first stages, China has developed a parachute system that can guide fallen rocket boosters to predetermined landing zones.
According to the Chinese Academy of Launch Vehicle Technology (CALT), which developed the system, the system was successfully tested on a Long March-3B (CZ-3B) rocket on Friday, June 9th. As they indicated in their statement, a review of the test data and an in-situ analysis of the debris showed that the parachute system helped narrow the range of the landing area by 80%. This could help pave the way for future parachute landing control technology applications, which could allow for controlled reentry, retrieval, and even reusability.
No rocket sleds were harmed in the making of this video. (NASA/JPL)
“You wanna go to Mars, you wanna go big? Then you gotta test big here,” says mechanical engineer Michael Meacham, and testing big is exactly what he and other engineers at NASA’s Jet Propulsion Laboratory have done to develop a new supersonic parachute for future Mars landings.
The process of putting things onto Mars has traditionally used the same couple of tried-and-true methods: inflatable, shock-absorbing bouncers and large parachutes combined with retro-rockets (most recently seen in the famous “Seven Minutes of Terror” Curiosity landing in August 2012.) But both methods are limited in how large and massive of an object can safely be placed on the Martian surface. For even larger-scale future missions, new technology will have to be developed to make successful landings possible.
Enter the LDSD, or Low-Density Supersonic Decelerator, an enormous parachute — similar to the one used by Curiosity except bigger — that can slow the descent of even more massive payloads through the thin Martian atmosphere.
Of course, part of the development process is testing. And in order to run such a large chute through the same sorts of rigors it would experience during an actual Mars landing, JPL engineers had to step outside of the wind tunnel and devise another method.
The one they came up with involves a rocket sled, a Night Hawk helicopter, a 100-lb steel bullet, a kilometer-long cable (and lots and lots of math.) It’s an experiment worthy of “Mythbusters”… watch the video above to see how it turned out.
“When we land spacecraft on Mars, we’re going extremely fast… we have got to slow down. So we use a parachute. And we use a really BIG parachute.”
– Michael Meacham, Mechanical Engineer at JPL
The bright spot in the center of this HiRISE image may be the 11-meter-wide parachute from Mars 3's descent stage (NASA/JPL-Caltech/Univ. of Arizona)
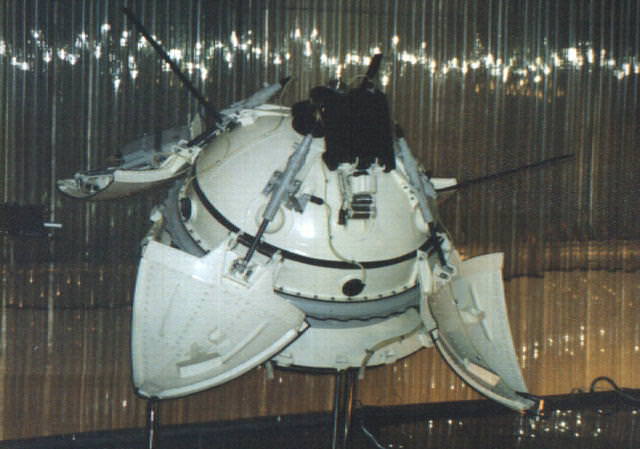
On May 28, 1971, the Soviet Union launched the Mars 3 mission which, like its previously-launched and ill-fated sibling Mars 2, consisted of an orbiter and lander destined for the Red Planet. Just over six months later on December 2, 1971, Mars 3 arrived at Mars — five days after Mars 2 crashed. The Mars 3 descent module separated from the orbiter and several hours later entered the Martian atmosphere, descending to the surface via a series of parachutes and retrorockets. (Sound familiar?) Once safely on the surface, the Mars 3 lander opened its four petal-shaped covers to release the 4.5-kg PROP-M rover contained inside… and after 20 seconds of transmission, fell silent. Due to unknown causes, the Mars 3 lander was never heard from or seen again.
Until now.
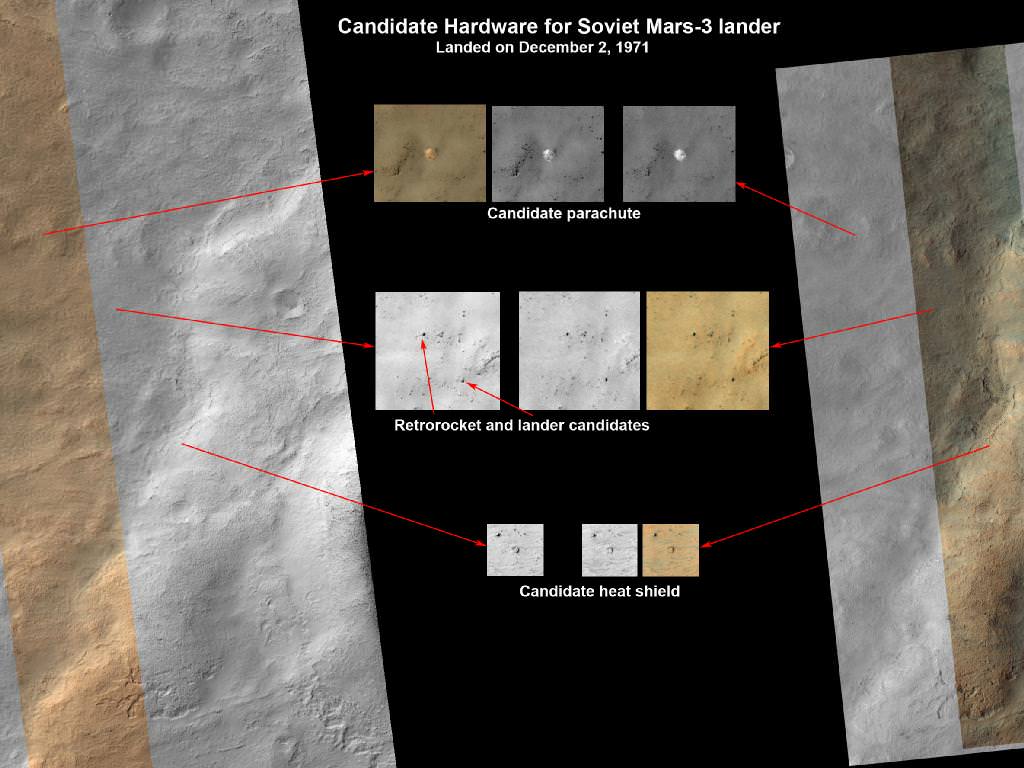
These images show what might be hardware from the Soviet Union’s 1971 Mars 3 lander (NASA/JPL-Caltech/Univ. of Arizona)
The set of images above shows what might be hardware from the 1971 Soviet Mars 3 lander, seen in a pair of images from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter.
While following news about Mars and NASA’s Curiosity rover, Russian citizen enthusiasts found four features in a five-year-old image from Mars Reconnaissance Orbiter that resemble four pieces of hardware from the Mars 3 mission: the parachute, heat shield, terminal retrorocket and lander. A follow-up image by the orbiter from last month shows the same features.
“Together, this set of features and their layout on the ground provide a remarkable match to what is expected from the Mars 3 landing, but alternative explanations for the features cannot be ruled out.”
– Alfred McEwen, HiRISE Principal Investigator
The Mars 3 lander (NSSDC)
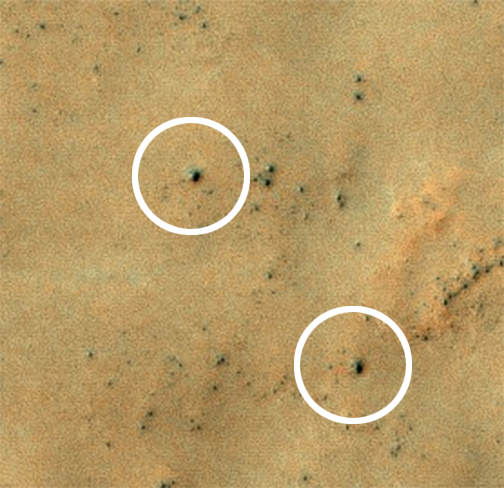
Vitali Egorov from St. Petersburg, Russia, heads the largest Russian Internet community about Curiosity. His subscribers did the preliminary search for Mars 3 via crowdsourcing. Egorov modeled what Mars 3 hardware pieces should look like in a HiRISE image, and the group carefully searched the many small features in this large image, finding what appear to be viable candidates in the southern part of the scene. Each candidate has a size and shape consistent with the expected hardware, and they are arranged on the surface as expected from the entry, descent and landing sequence.
“I wanted to attract people’s attention to the fact that Mars exploration today is available to practically anyone,” Egorov said. “At the same time we were able to connect with the history of our country, which we were reminded of after many years through the images from the Mars Reconnaissance Orbiter.”
The predicted Mars 3 landing site was at latitude 45 degrees south, longitude 202 degrees east, in Ptolemaeus Crater. HiRISE acquired a large image at this location in November 2007, and promising candidates for the hardware from Mars 3 were found on Dec. 31, 2012.
Candidate features of the Mars 3 retrorockets (top) and lander (bottom)
The candidate parachute is the most distinctive feature in the images (seen above at top.) It is an especially bright spot for this region, about 8.2 yards (7.5 meters) in diameter.
The parachute would have a diameter of 12 yards (11 meters) if fully spread out over the surface, so this is consistent.
“Together, this set of features and their layout on the ground provide a remarkable match to what is expected from the Mars 3 landing, but alternative explanations for the features cannot be ruled out,” said HiRISE Principal Investigator Alfred McEwen of the University of Arizona, Tucson. “Further analysis of the data and future images to better understand the three-dimensional shapes may help to confirm this interpretation.”