China's Tianwen-1 spacecraft on its way to Mars. Credit: CNSA/CLEP
The CNSA (Chinese National Space Agency) has released an image of its Tianwen-1 spacecraft to coincide with the National Day and Mid-Autumn Festival. The spacecraft is on its way to Mars, and if the landing is successful, China will be only the third nation to successfully land a spacecraft on the planet.
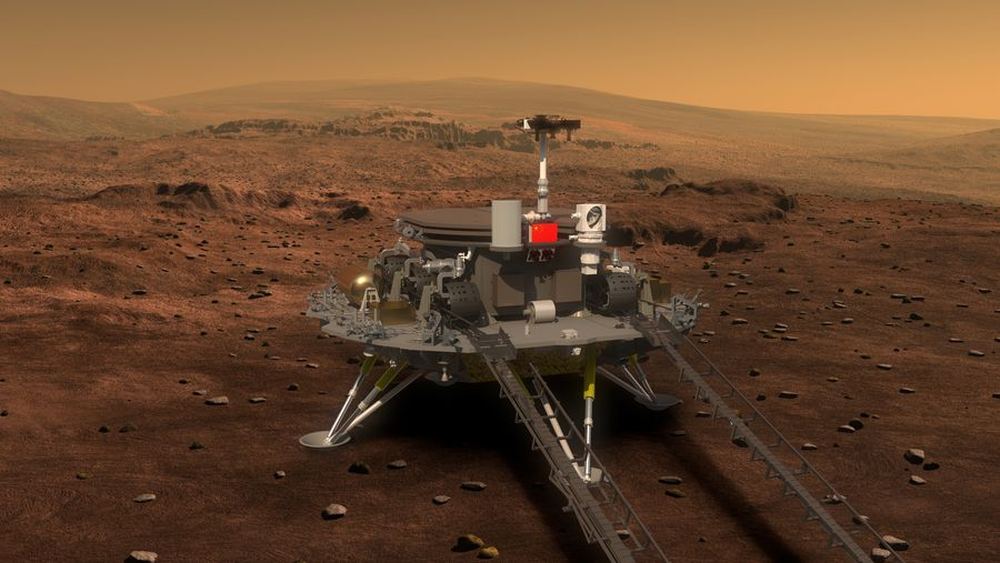
Picture released on Aug 23, 2016 by the lunar probe and space project center of Chinese State Administration of Science, Technology and Industry for National Defence shows the concept portraying what the Mars rover and lander would look like. [Photo/Xinhua]
Friday April 24th was China’s “Space Day,” celebrated on the 50 year anniversary of their first satellite launch. This past Friday, China marked the occasion with the announcement of the name for their first Mars Lander: Tianwen.
According to China’s National Space Administration (CNSA), Tianwen translates to “Quest for Heavenly Truth.”
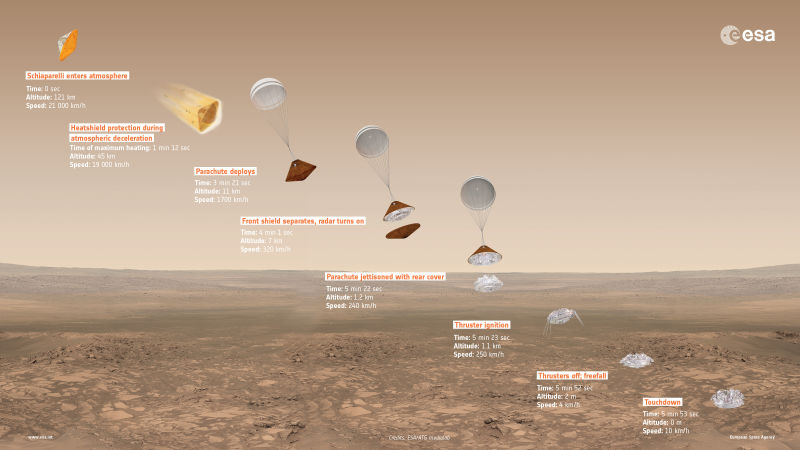
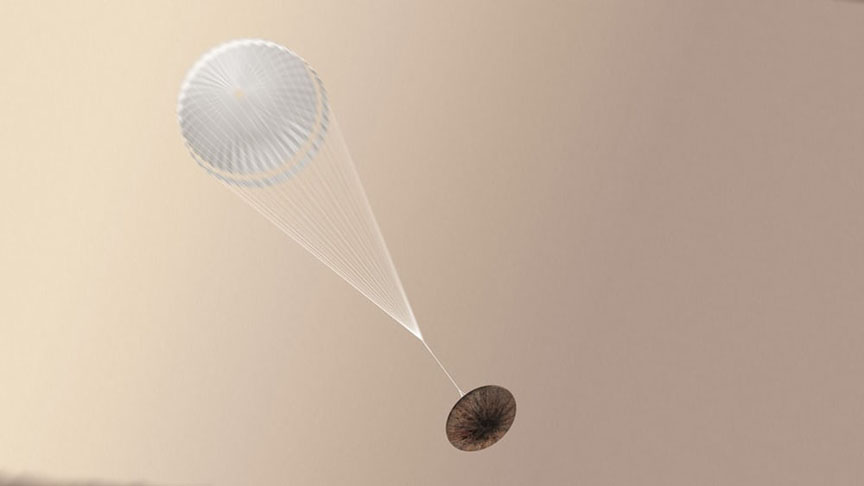
Artist's impression of the ExoMars Schiaparelli lander passing into Mars' atmosphere. Credit: ESA
The European Space Agency (ESA) and Roscomos (the Russian federal space agency) had high hopes for the Schiaparelli lander, which crashed on the surface of Mars on October 19th. As part of the ExoMars program, its purpose was to test the technologies that will be used to deploy a rover to the Red Planet in 2020.
However, investigators are making progress towards determining what went wrong during the lander’s descent. Based on their most recent findings, they concluded that an anomaly took place with an on-board instrument that led to the lander detaching from its parachute and backshell prematurely. This ultimately caused it to land hard and be destroyed.
According to investigators, the data retrieved from the lander indicates that for the most part, Schiaparelli was functioning normally before it crashed. This included the parachute deploying once it had reached an altitude of 12 km and achieved a speed of 1730 km/h. When it reached an altitude of 7.8 km, the lander’s heatshield was released, and it radar altimeter provided accurate data to the lander’s on-board guidance, navigation and control system.
Schiaparelli lander descent sequence. According to their investigation, the ESA has determined that an error led the parachute and backshell to be jettisoned prematurely, causing the lander to crash. Credit: ESA/ATG medialab
All of this happened according to plan and did not contribute to the fatal crash. However, an anomaly then took place with the Inertial Measurement Unit (IMU), which is there to measure the rotation rates of the vehicle. Apparently, the IMU experienced saturation shortly after the parachute was deployed, causing it to persist for one second longer than required.
This error was then fed to the navigation system, which caused it to generate an estimate altitude that was below Mars’ actual ground level. In essence, the lander thought it was closer to the ground than it actually was. As such, the the parachute and backshell of the Entry and Descent Module (EDM) were jettisoned and the braking thrusters fired prematurely – at an altitude of 3.7 km instead of 1.2 km, as planned.
This briefest of errors caused the lander to free-fall for one second longer than it was supposed to, causing it to land hard and be destroyed. The investigators have confirmed this assessment using multiple computer simulations, all of which indicate that the IMU error was responsible. However, this is still a tentative conclusion that awaits final confirmation from the agency.
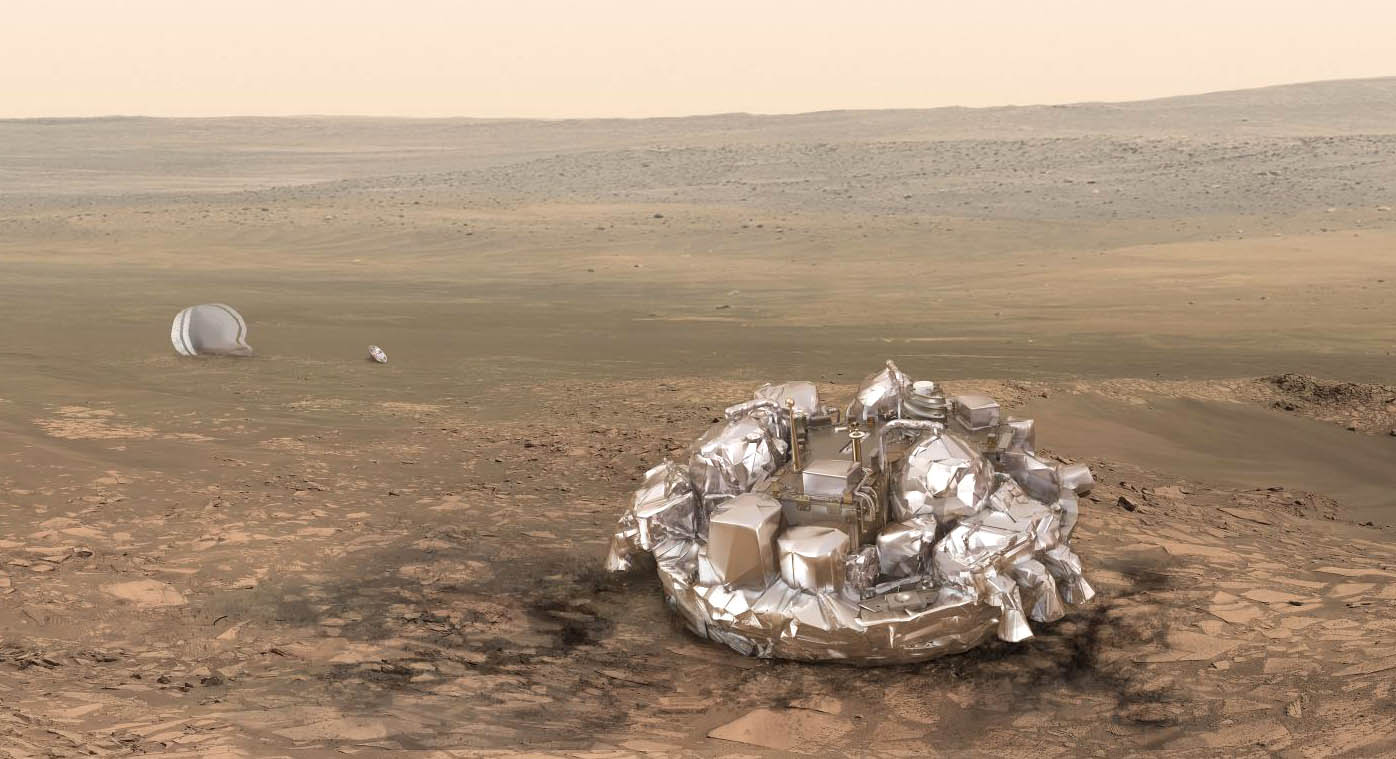
Artist’s impression of the Schiaparelli lander on Mars. Credit: ESA/ATG medialab
As David Parker, the ESA’s Director of Human Spaceflight and Robotic Exploration, said on on Wednesday, Nov. 23rd in a ESA press release:
“This is still a very preliminary conclusion of our technical investigations. The full picture will be provided in early 2017 by the future report of an external independent inquiry board, which is now being set up, as requested by ESA’s Director General, under the chairmanship of ESA’s Inspector General. But we will have learned much from Schiaparelli that will directly contribute to the second ExoMars mission being developed with our international partners for launch in 2020.”
In other words, this accident has not deterred the ESA and Roscosmos from pursuing the next stage in the ExoMars program – which is the deployment of the ExoMars rover in 2020. When it reaches Mars in 2021, the rover will be capable of navigating autonomously across the surface, using a on-board laboratory suite to search for signs of biological life, both past and present.
In the meantime, data retrieved from Schiaparelli’s other instruments is still being analyzed, as well as information from orbiters that observed the lander’s descent. It is hoped that this will shed further light on the accident, as well as salvage something from the mission. The Trace Gas Orbiter is also starting its first series of observations since it made its arrival in orbit on Oct. 19th, and will reach its operational orbit towards the end of 2017.
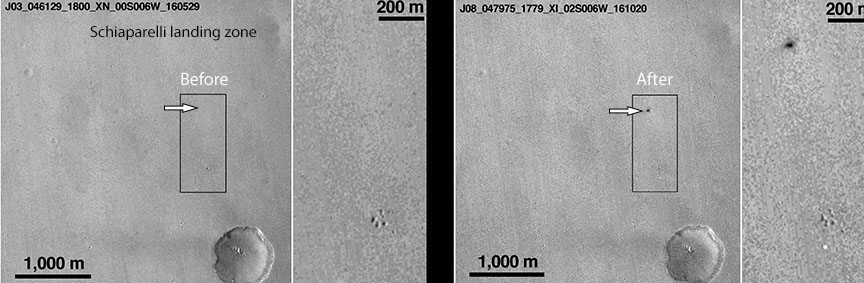
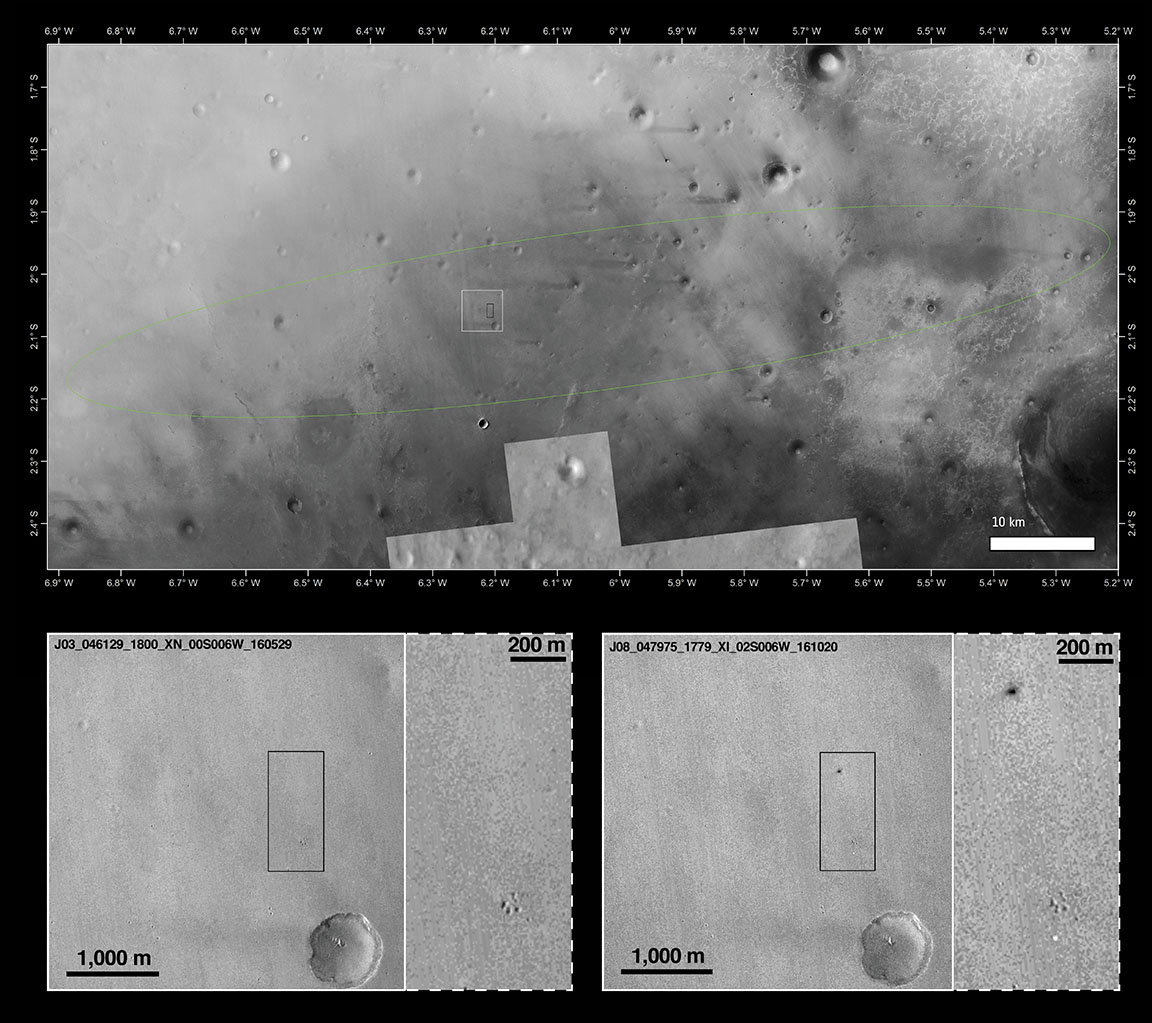
Mars Reconnaissance Orbiter view of Schiaparelli landing site before and after the lander arrived. The images have a resolution of 6 meters per pixel and shows two new features on the surface when compared to an image from the same camera taken in May this year. The black dot appears to be the lander impact site and the smaller white dot below the paw-shaped cluster of craters, the parachute. Credit: NASA
Mars Reconnaissance Orbiter view of Schiaparelli landing site before and after the lander arrived. The images have a resolution of 6 meters per pixel and shows two new features on the surface when compared to an image from the same camera taken in May this year. The black dot appears to be the lander impact site and the smaller white dot below the paw-shaped cluster of craters, the parachute. Credit: NASA
Instead of a controlled descent to the surface using its thrusters, ESA’s Schiaparelli lander hit the ground hard and may very well have exploded on impact. NASA’s Mars Reconnaissance Orbiter then-and-now photos of the landing site have identified new markings on the surface of the Red Planet that are believed connected to the ill-fated lander.
Schiaparelli entered the martian atmosphere at 10:42 a.m. EDT (14:42 GMT) on October 19 and began a 6-minute descent to the surface, but contact was lost shortly before expected touchdown seconds after the parachute and back cover were discarded. One day later, the Mars Reconnaissance Orbiter took photos of the expected touchdown site as part of a planned imaging run.
The landing site is shown within the Schiaparelli landing ellipse (top) along with before and after images below. Copyright Main image: NASA/JPL-Caltech/MSSS, Arizona State University; inserts: NASA/JPL-Caltech/MSSS
One of the features is bright and can be associated with the 39-foot-wide (12-meter) diameter parachute used in the second stage of Schiaparelli’s descent. The parachute and the associated back shield were released from Schiaparelli prior to the final phase, during which its nine thrusters should have slowed it to a standstill just above the surface.
The other new feature is a fuzzy dark patch or crater roughly 50 x 130 feet (15 x 40 meters) across and about 0.6 miles (1 km) north of the parachute. It’s believed to be the impact crater created by the Schiaparelli module following a much longer free fall than planned after the thrusters were switched off prematurely.
Artist’s concept of Schiaparelli deploying its parachute. The parachute may also have played a role in the crash. It may have deployed too soon, causing the thrusters to fire too soon. The thrusters may also have simply cut out too soon after firing. Credit: ESA
Mission control estimates that Schiaparelli dropped from between 1.2 and 2.5 miles (2 and 4 km) altitude, striking the Martian surface at more than 186 miles an hour (300 km/h). The dark spot is either disturbed surface material or it could also be due to the lander exploding on impact, since its thruster propellant tanks were likely still full. ESA cautions that these findings are still preliminary.
Something went wrong with Schiaparelli’s one or more sets of thrusters during the descent, causing the lander to crash on the surface at high speed. Credit: ESA
Since the module’s descent trajectory was observed from three different locations, the teams are confident that they will be able to reconstruct the chain of events with great accuracy. Exactly what happened to cause the thrusters to shut down prematurely isn’t yet known.
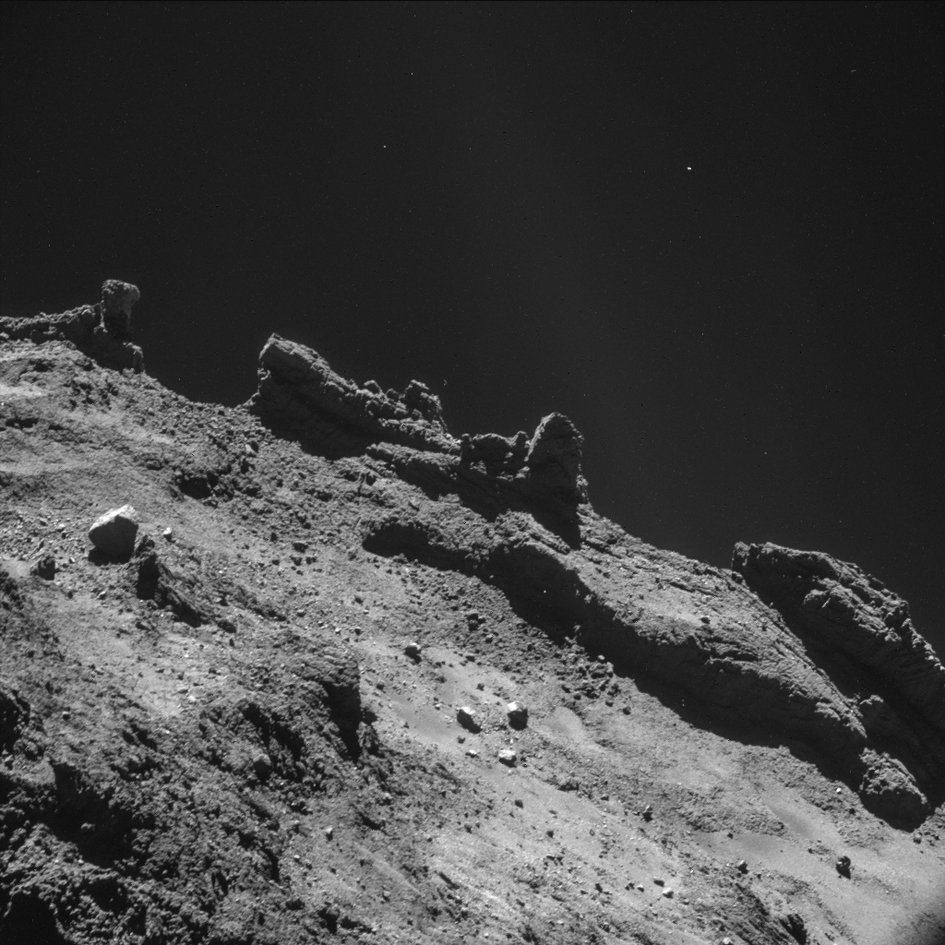
NAVCAM image of comet 67P/Churyumov-Gerasimenko acquired on Nov. 22, 2015.
NAVCAM image of comet 67P/Churyumov-Gerasimenko acquired on Nov. 22, 2015. Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0.
ESA’s Philae lander, the first spacecraft to successfully soft-land on the surface of a comet and former piggyback partner to Rosetta, has not been in communication since July of 2015 and, with 67P now six months past perihelion and heading deeper out into the Solar System, it’s not likely it will ever be heard from again.
Europa’s water exists in a layer around the planet, encased in a layer of ice. Could there be life down there?
Hooray! Welcome to the 200th official episode of the Guide To Space!
First off, thank you. Thank you for watching, liking, sharing, subscribing and being a patron of our show. Yes, you. Thank you.
So to celebrate, a few weeks ago we invited the members of the Weekly Space Hangout Crew Google+ Community to suggest topics for episodes, and the winner would receive a precious iron-nickel meteorite. Congratulations Andres Munoz, this meteorite is for you.
This episode, chosen by Andres, is for everyone.
The search for life in the Solar System is about the hunt for water. Wherever we find liquid water on Earth, we find life. I’m talking everywhere. In the most briny, salty pools in Antarctica, in the hottest hot springs in Yellowstone, under glaciers, and kilometers deep underground.
So we go searching for liquid water in the Solar System.
You might be surprised to learn that Jupiter’s moon Europa has the most water in the entire Solar System. If you took all the water on Earth, collected it into a big sphere, it would measure almost 1,400 kilometers across.
Europa’s water would measure nearly 1,800 kilometers.All that water exists in a layer around Europa, encased in a layer of ice. How thick? We don’t know.
Is there life down there? We don’t know.You can say there might be, and it wouldn’t be untrue. However, if you say there isn’t, that’s way less interesting for clickbait purposes. Whenever we don’t know the answers to fundamental and intriguing questions like that, it’s time to send a mission.
Good news! An actual mission to Europa is in the works right now. In 2015, NASA approved the development of an orbiter mission to Europa. If all goes well, and nothing gets cancelled…
And nothing will get cancelled, right? Right? I heard Firefly. Which one of you said Firefly?!?
According to the plan, a spacecraft will launch in the 2020s, carrying 9 instruments to Europa. Most will be familiar cameras, mass spectrometers, and the like, to study the surface of Europa to a high level of resolution. Over the course of 45 flybys, the spacecraft will get down as close as 25 kilometers and capture it with incredible resolution.
A “colorized” image of Europa from NASA’s Galileo spacecraft, whose mission ended in 2003. The whiteish areas are believed to be pure water ice. Credit: NASA/JPL-Caltech/SETI Institute
Perhaps the most exciting, and controversial instrument on board the new Europa Orbiter mission will be its ice-penetrating radar. Mission planners battled over installing a radar this sophisticated, as it will be an enormous drain on the orbiter’s power.
This for us is incredibly exciting. It will allow the spacecraft to map out the depth and thickness of Europa’s icy exterior. Is it thick or thin? Are there pockets of water trapped just below the surface, or is it tough shell that goes on for dozens of kilometers?
The worst case scenario is that the shell goes thicker than the radar can reach, and we won’t even know how far it goes.
Whatever happens, the Europa orbiter will be a boon to science, answer outstanding questions about the moon and the chances of finding life there.
We’re just getting started. What we really want to send is a lander. Because of the intense radiation from Jupiter, the Sun, and space itself, the surface of the ice on Europa would be sterilized. But dig down a few centimeters and you might find life that’s protected from the radiation.
A future Europa lander might be equipped with a heated drill attached to a tether. The lander would be have with a heat-generated radioisotope thermoelectric generator, like most of NASA’s big, outer Solar System spacecraft.
Artist illustration of a Europa probe. Image credit: NASA/JPL
But in addition to using it for electricity, it’ll use the raw heat to help a tethered drill to grind through the ice a few meters and sample what’s down there.
Drilling more than a few meters is probably the stuff of science fiction. Russian scientists in Antarctica drilled for almost two decades to get through 4,000 meters of ice above Lake Vostok. Imagine trying to get through 100 kilometers of the stuff, on a distant world, with a robot.
But, since I’ve talked about moving the Sun, and terraforming the Moon, maybe I shouldn’t put any bounds on my imagination. Nuclear-powered Europa submarines will get us swimming with the singing Europan space whales in no time.
Europa is the best place to search the Solar System for life, and I’m excited to see what the upcoming Europa Orbiter mission turns up. And I’m even more excited about the possibility of any future lander missions.
It was a lot of fun wrapping my brain around a topic chosen by the fans. What topic would you like us to cover next? I’ve got a whole pocket of meteorites here. Put it in the comments below.
First, I want to thank everyone. It’s been a crazy race getting up to 200 episodes, but it’s been a blast all the way through. Thanks again for all your support and here’s to 200 more!
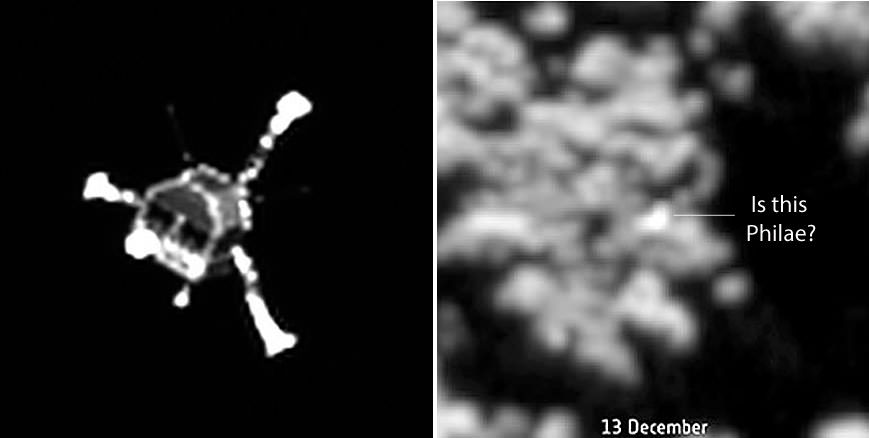
Left image from Rosetta’s OSIRIS narrow-angle camera shows the Philae lander on November 12, 2014 after it left the spacecraft for the comet's nucleus. Right: Close-up of a promising candidate for the lander photographed on December 12. Copyright: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
It’s only a bright dot in a landscape of crenulated rocks, but the Rosetta team thinks it might be Philae, the little comet lander lost since November.
The Rosetta and Philae teams have worked tirelessly to search for the lander, piecing together clues of its location after a series of unfortunate events during its planned landing on the surface of Comet 67P/Churyumov-Gerasimenko last November 12.
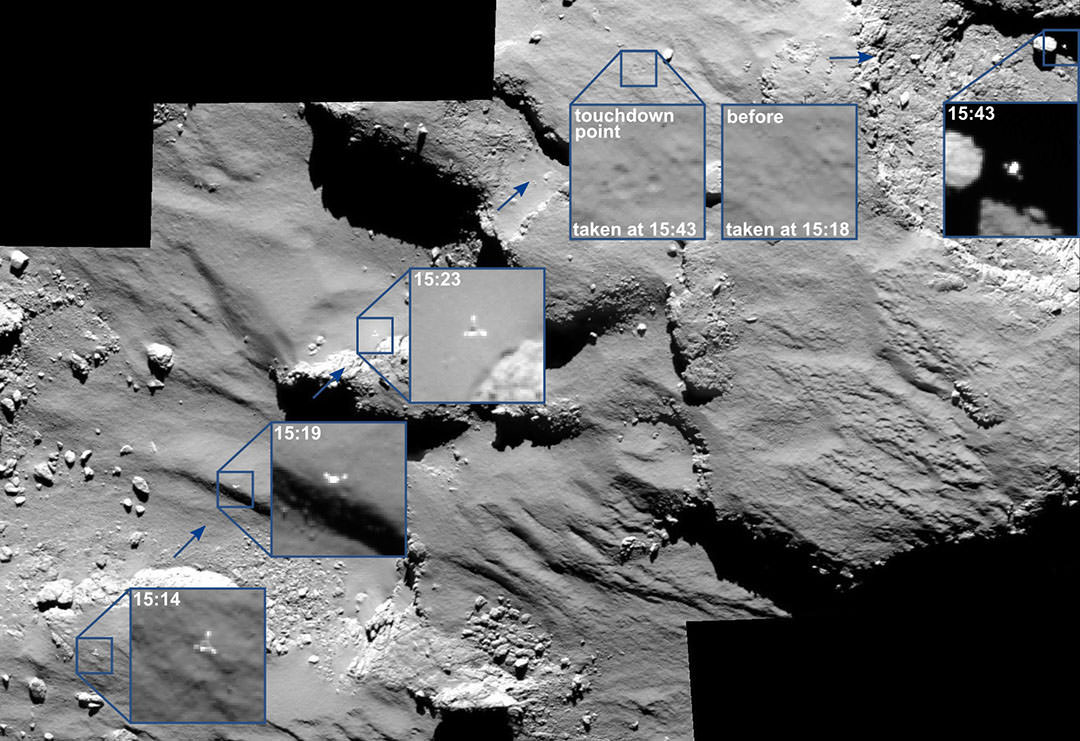
Mosaic photo capturing Philae’s flight above the comet’s nucleus and one of its three touchdowns on November 12, 2014. The images cover a 30 minute period spanning the first touchdown. The Greenwich Mean Time time of each of image is marked on the corresponding insets. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Philae first touched down at the Agilkia landing site that day, but the harpoons that were intended to anchor it to the surface failed to work, and the ice screws alone weren’t enough to do the job. The lander bounced after touchdown and sailed above the comet’s nucleus for two hours before finally settling down at a site called Abydos a kilometer from its intended landing site.
No one yet knows exactly where Philae is, but an all-out search has finally turned up a possible candidate.
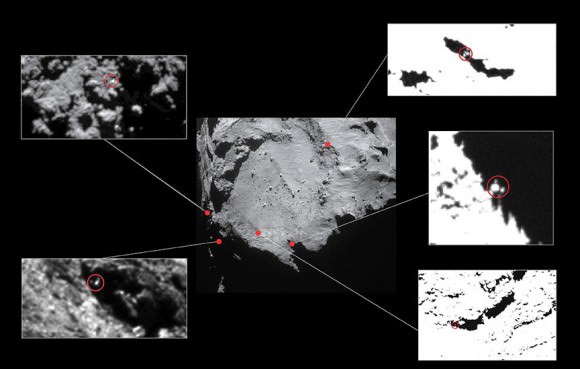
Approximate locations of five lander candidates initially identified in high-resolution photos taken in December 2014, from a distance of about 12.4 miles (20 km) from the comet’s center. The candidates identify Philae-sized features about 3-6 feet (1-2 meters) across. The contrast has been stretched in some of the images to better reveal the candidates. All but one of them (top left) have subsequently been ruled out. The candidate at top left lies near to the current CONSERT ellipse (see below). Credit: ESA/Rosetta/NavCam – CC BY-SA IGO 3.0; insets: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Rosetta’s navigation and high-resolution cameras identified the first landing site and also took several pictures of Philae as it traveled above the comet before coming down for a final landing. Magnetic field measurements taken by an instrument on the lander itself also helped establish its location and orientation during flight and touchdown. The lander is thought to be in rough terrain perched up against a cliff and mostly in shadow.
High resolution images of the possible landing zone were taken by Rosetta back in December when it was about 11 miles (18 km) from the comet’s surface. At this distance, the OSIRIS narrow-angle camera has a resolution of 13.4 inches (34 cm) per pixel. The body of Philae is just 39 inches (1-meter) across, while its three thin legs extend out by up to 4.6 feet (1.4-meters) from its center. In other words, Philae’s just a few pixels across — a tiny target but within reach of the camera’s eye.
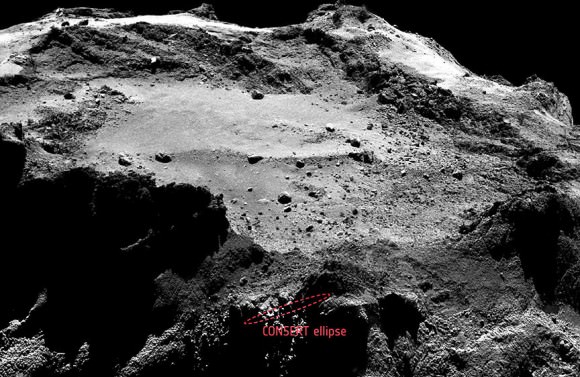
The current 50 x 525 feet (16 x 160 m) CONSERT ellipse overlaid on an OSIRIS narrow-angle camera image of the same region. It’s believed Philae is located within or near this ellipse. Copyright Ellipse: ESA/Rosetta/Philae/CONSERT; Image: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The candidates in the photo above are “all over the place.” To narrow down the location, the Rosetta team used radio signals sent between Philae and Rosetta as part of the COmet Nucleus Sounding Experimentor CONSERT after the final touchdown. According to Emily Baldwin’s recent posting on the Rosetta site:
“Combining data on the signal travel time between the two spacecraft with the known trajectory of Rosetta and the current best shape model for the comet, the CONSERT team have been able to establish the location of Philae to within an ellipse roughly 50 x 525 feet (16 x 160 meters) in size, just outside the rim of the Hatmehit depression.”
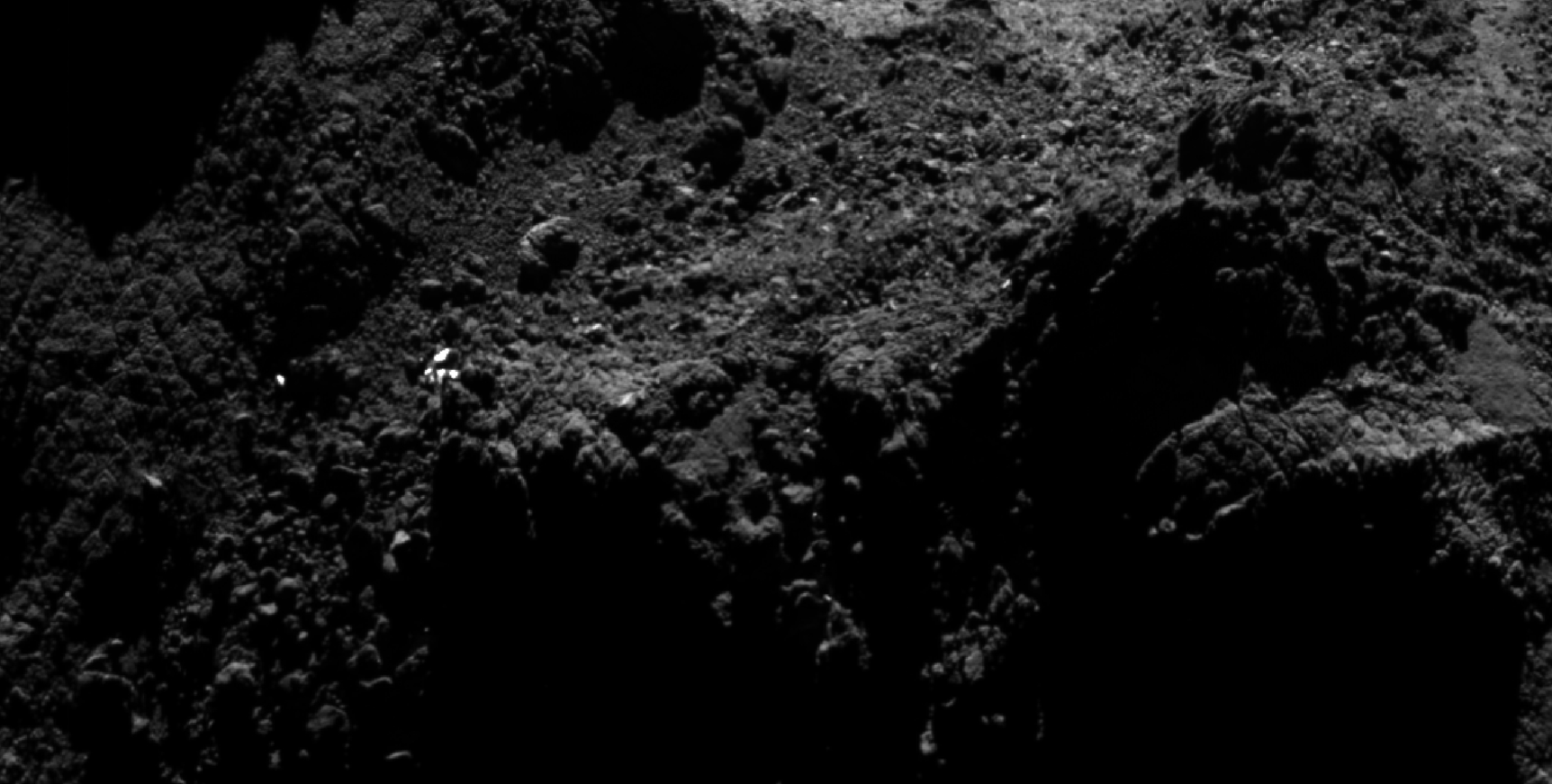
Zooming in to the CONSERT ellipse, a number of bright dots are seen in the region. Since only one could be the lander, the majority must be associated with surface features on the comet nucleus. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
So what can we see there? Zooming in closer, a number of glints or bright spots appear, and they change depending on the viewing angle. But among those glints, one might be Philae. What mission scientists examined images of the area under the same lighting conditions before Philae landed and then put them side by side with those taken after November 12. That way any transient glints could be eliminated, leaving what’s left as a potential candidate.
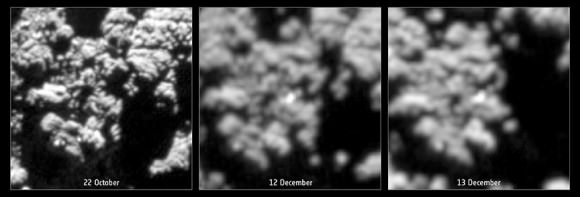
‘Before’ and ‘after’ comparison images of a promising candidate located near the CONSERT ellipse as seen in images from Rosetta. Each box covers roughly 65×65 feet (20 x 20 m) on the comet. The left-hand image shows the region as seen on 22 October (before the landing of Philae) from a distance of about 6 miles from the center of the comet, while the center and right-hand images show the same region on December 12 and 13 from 12 miles (20 km) after landing. The candidate is only seen in the two later pictures. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
In photos taken on December 12 and 13, a bright spot is seen that didn’t appear in the earlier photos. Might this be Philae? It’s possible and the best candidate yet. But it may also be a new physical feature that developed between November and December. Comet surfaces are forever changing as sunlight sublimates ice both on and beneath the surface
For now, we still can’t be sure if we’ve found Philae. Higher resolution pictures will be required as will patience. The comet’s too close to the Sun right now and too active. Rubble flying off the nucleus could damage Rosetta’s instruments. Mission scientists will have to wait until well after the comet’s August perihelion (closest approach to the Sun) for a closer look.
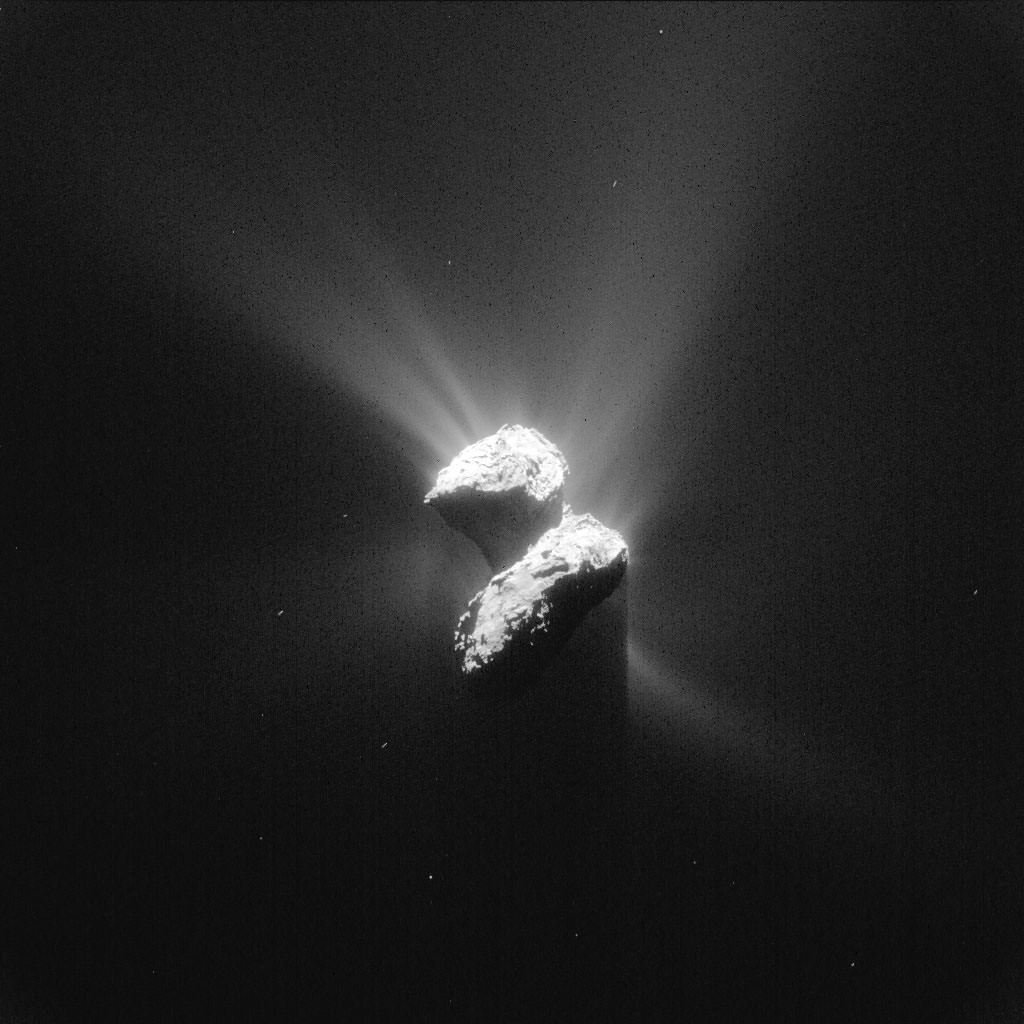
Magnificent! Comet 67P/Churyumov-Gerasimenko photographed by Rosetta from about 125 miles away on June 5, 2015. Now only two months from perihelion, the comet’s crazy with jets of dust and gas. One wonders what the chances are of a gassy geyser erupting beneath or near Philae and sending it back into orbit again. Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
Meanwhile, mission teams remain hopeful that with increasing sunlight at the comet this summer, Philae’s solar panels will recharge its batteries and the three-legged lander will wake up and resume science studies. Three attempts have been made to contact Philae this spring and more will be made but so far, we’ve not heard a peep.
For the time being, Philae’s like that lost child in a shopping mall. The search party’s been dispatched, clues have been found and it’s only a matter of time before we see her smiling face again.
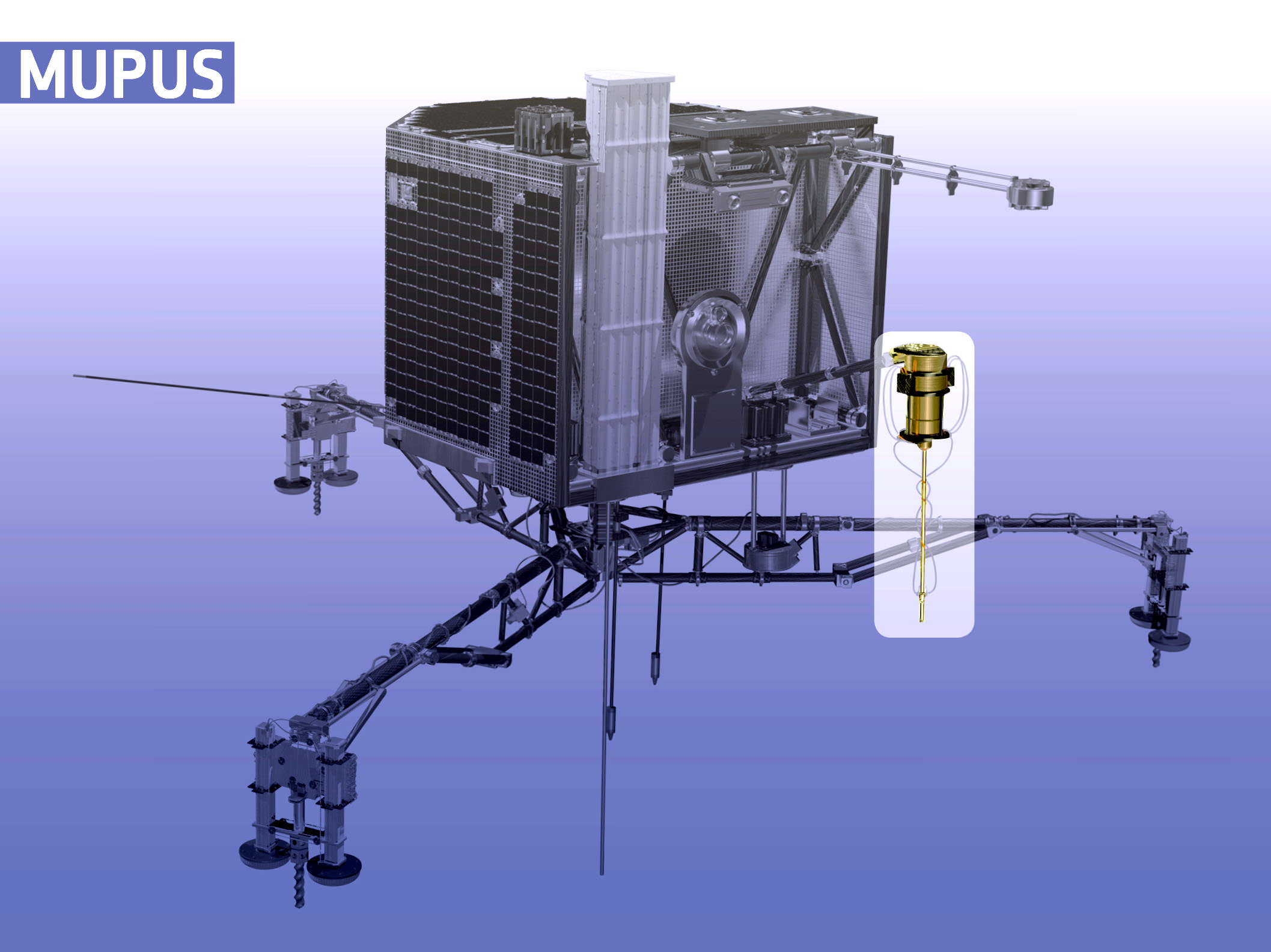
Philae's MUPUS probe took temperature measurements and hammered into the surface at the landing site to discover the lander alighted on some very hard ice. Credit: ESA
An uncontrolled, chaotic landing. Stuck in the shadow of a cliff without energy-giving sunlight. Philae and team persevered. With just 60 hours of battery power, the lander drilled, hammered and gathered science data on the surface of comet 67P/Churyumov-Gerasimenko before going into hibernation. Here’s what we know.
Despite appearances, the comet’s hard as ice. The team responsible for the MUPUS (Multi-Purpose Sensors for Surface and Sub-Surface Science) instrument hammered a probe as hard as they could into 67P’s skin but only dug in a few millimeters:
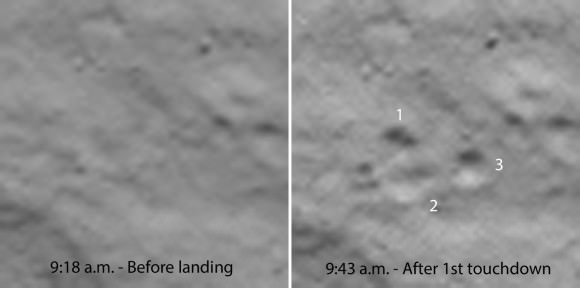
Close-up of the first touchdown site before Philae landed (left) and after clearly shows the impressions of its three footpads in the comet’s dusty soil. At the final landing site, it’s believed that Times are CST. Philae’s 3.3 feet (1-m) across. Credit: ESA
“Although the power of the hammer was gradually increased, we were not able to go deep into the surface,” said Tilman Spohn from the DLR Institute of Planetary Research, who leads the research team. “If we compare the data with laboratory measurements, we think that the probe encountered a hard surface with strength comparable to that of solid ice,” he added. This shouldn’t be surprising, since ice is the main constituent of comets, but much of 67P/C-G appears blanketed in dust, leading some to believe the surface was softer and fluffier than what Philae found.
This finding was confirmed by the SESAME experiment (Surface Electrical, Seismic and Acoustic Monitoring Experiment) where the strength of the dust-covered ice directly under the lander was “surprisingly high” according to Klaus Seidensticker from the DLR Institute. Two other SESAME instruments measured low vaporization activity and a great deal of water ice under the lander.
As far as taking the comet’s temperature, the MUPUS thermal mapper worked during the descent and on all three touchdowns. At the final site, MUPUS recorded a temperature of –243°F (–153°C) near the floor of the lander’s balcony before the instrument was deployed. The sensors cooled by a further 10°C over a period of about a half hour:
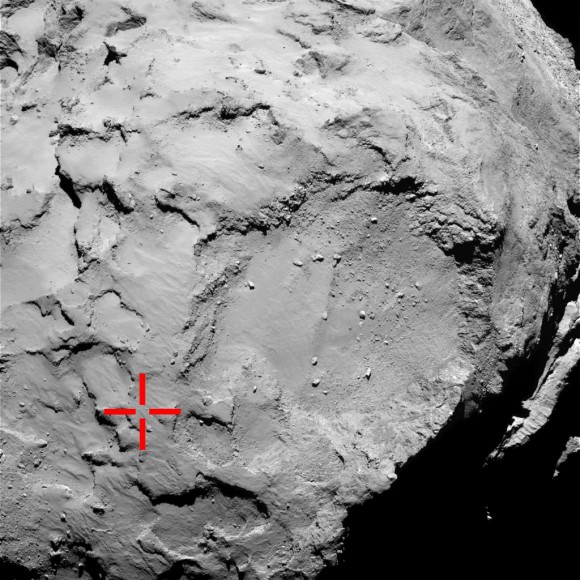
The location of Philae’s first touchdown on the surface of Comet 67P/C-G. Although covered in dust in many areas, Philae found strong evidence for firm ice beneath the comet’s surface. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
“We think this is either due to radiative transfer of heat to the cold nearby wall seen in the CIVA images or because the probe had been pushed into a cold dust pile,” says Jörg Knollenberg, instrument scientist for MUPUS at DLR. After looking at both the temperature and hammer probe data, the Philae team’s preliminary take is that the upper layers of the comet’s surface are covered in dust 4-8 inches (10-20 cm), overlaying firm ice or ice and dust mixtures.
The ROLIS camera (ROsetta Lander Imaging System) took detailed photos during the first descent to the Agilkia landing site. Later, when Philae made its final touchdown, ROLIS snapped images of the surface at close range. These photos, which have yet to be published, were taken from a different point of view than the set of panorama photos already received from the CIVA camera system.
During Philae’s active time, Rosetta used the CONSERT (COmet Nucleus Sounding Experiment by Radio wave Transmission) instrument to beam a radio signal to the lander while they were on opposite sides of the comet’s nucleus. Philae then transmitted a second signal through the comet back to Rosetta. This was to be repeated 7,500 times for each orbit of Rosetta to build up a 3D image of 67P/C-G’s interior, an otherworldly “CAT scan” as it were. These measurements were being made even as Philae lapsed into hibernation. Deeper down the ice becomes more porous as revealed by measurements made by the orbiter.
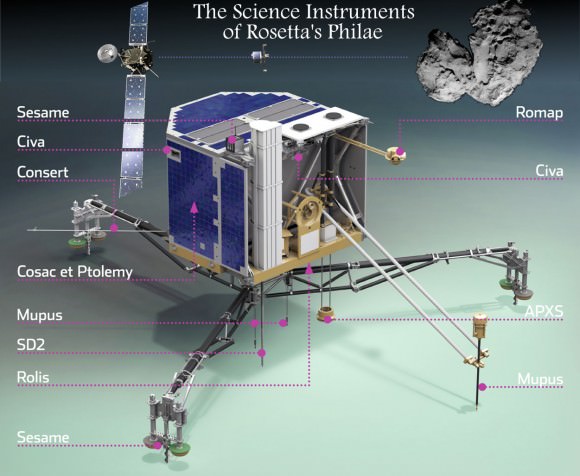
Rosetta’s Philae lander includes a carefully selected set of instruments to analyze a comet’s surface. Credit: ESA, Composite – T.Reyes
The last of the 10 instruments on board the Philae lander to be activated was the SD2 (Sampling, Drilling and Distribution subsystem), designed to provide soil samples for the COSAC and PTOLEMY instruments. Scientists are certain the drill was activated and that all the steps to move a sample to the appropriate oven for baking were performed, but the data right now show no actual delivery according to a tweet this morning from Eric Hand, reporter at Science Magazine. COSAC worked as planned however and was able to “sniff” the comet’s rarified atmosphere to detect the first organic molecules. Research is underway to determine if the compounds are simple ones like methanol and ammonia or more complex ones like the amino acids.
Stephan Ulamec, Philae Lander manager, is confident that we’ll resume contact with Philae next spring when the Sun’s angle in the comet’s sky will have shifted to better illuminate the lander’s solar panels. The team managed to rotate the lander during the night of November 14-15, so that the largest solar panel is now aligned towards the Sun. One advantage of the shady site is that Philae isn’t as likely to overheat as 67P approaches the Sun en route to perihelion next year. Still, temperatures on the surface have to warm up before the battery can be recharged, and that won’t happen until next summer.
Let’s hang in there. This phoenix may rise from the cold dust again.
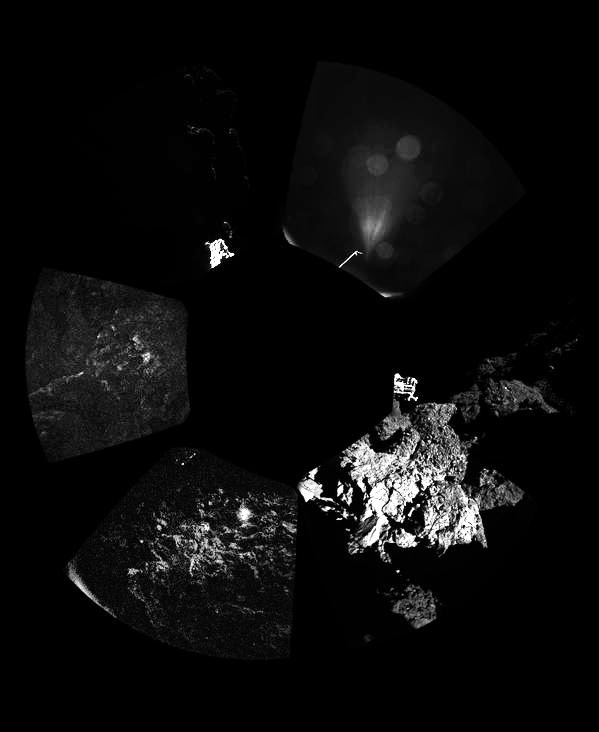
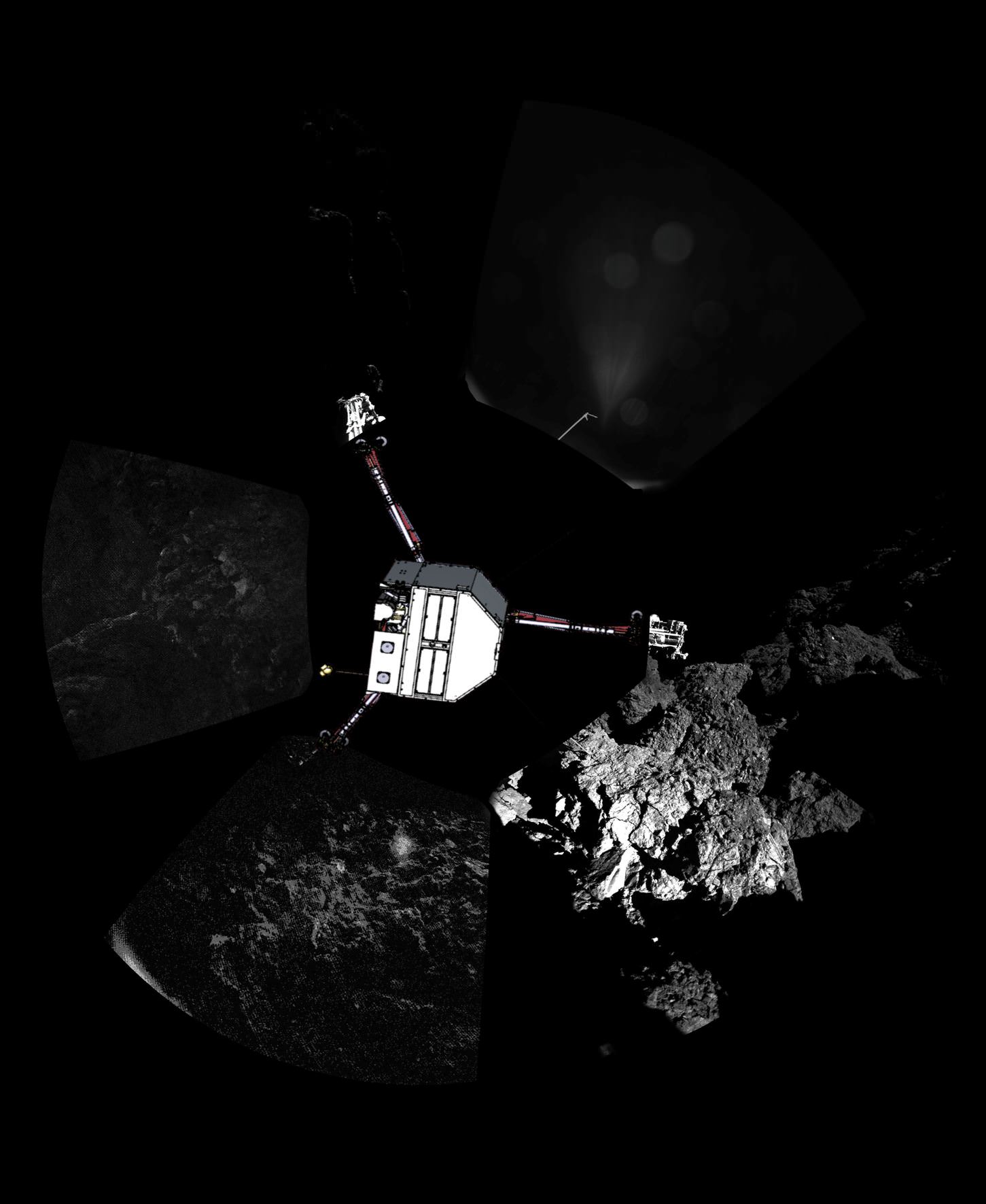
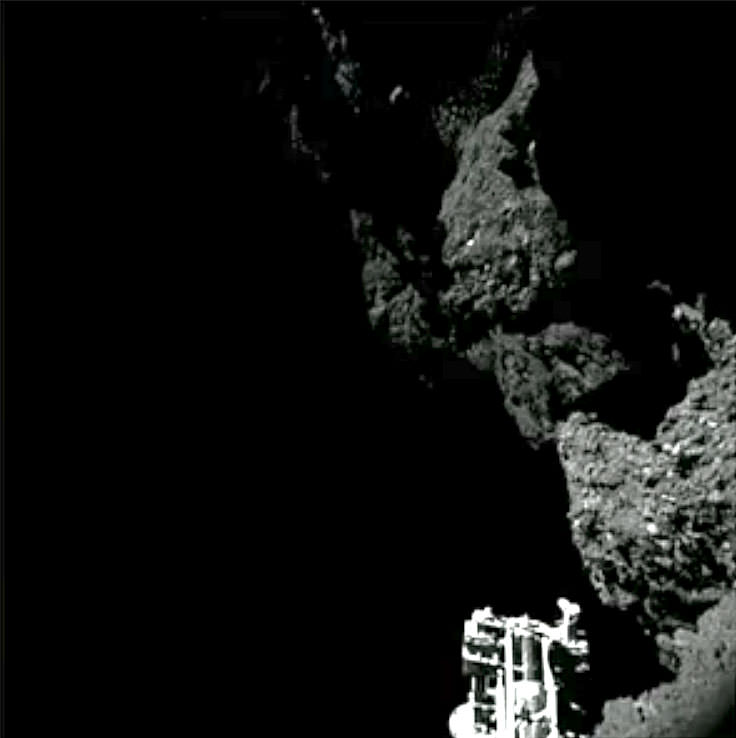
First panorama sent by Philae from the surface of the comet. At upper right we see the reflection of the Sun and the top of the CONSERT instrument antenna. Credit: ESA
We may not know exactly where Philae is, but it’s doing a bang-up job sending its first photos from comet 67P/Churyumov-Gerasimenko. After bouncing three times on the surface, the lander is tilted vertically with one foot in open space in a “handstand” position. When viewing the photographs, it’s good to keep that in mind.
Philae landed nearly vertically on its side with one leg up in outer space. Here we see it in relation to the panoramic photos taken with the CIVA cameras. Credit: ESA
Although it’s difficult to say how far away the features are in the image. In an update today at a press briefing, Jean Pierre Biebring, principal investigator of CIVA/ROLIS (lander cameras), said that the features shown in the frame at lower left are about 1-meter or 3 feet away. Philae settled into its final landing spot after a harrowing first bounce that sent it flying as high as a kilometer above the comet’s surface.
After hovering for two hours, it landed a second time only to bounce back up again a short distance – this time 3 cm or about 1.5 inches. Seven minutes later it made its third and final landing. Incredibly, the little craft still functions after trampolining for hours!
Stephan Ulamec, Philae Lander manager, describes how Philae first landed less than 100 meters from the planned Agilkia site (red square). Without functioning harpoons and thrusters to fix it to the ground there, it rebounded and shot a kilometer above the comet. Right now, it’s somewhere in the blue diamond. Credit: ESA
Despite its awkward stance, Philae continues to do a surprising amount of good science. Scientists are still hoping to come up with a solution to better orientate the lander. Their time is probably limited. The craft landed in the shadow of a cliff, blocking sunlight to the solar panels used to charge its battery. Philae receives only 1.5 hours instead of the planned 6-7 hours of sunlight each day. That makes tomorrow a critical day. Our own Tim Reyes of Universe Today had this to say about Philae’s power requirements:
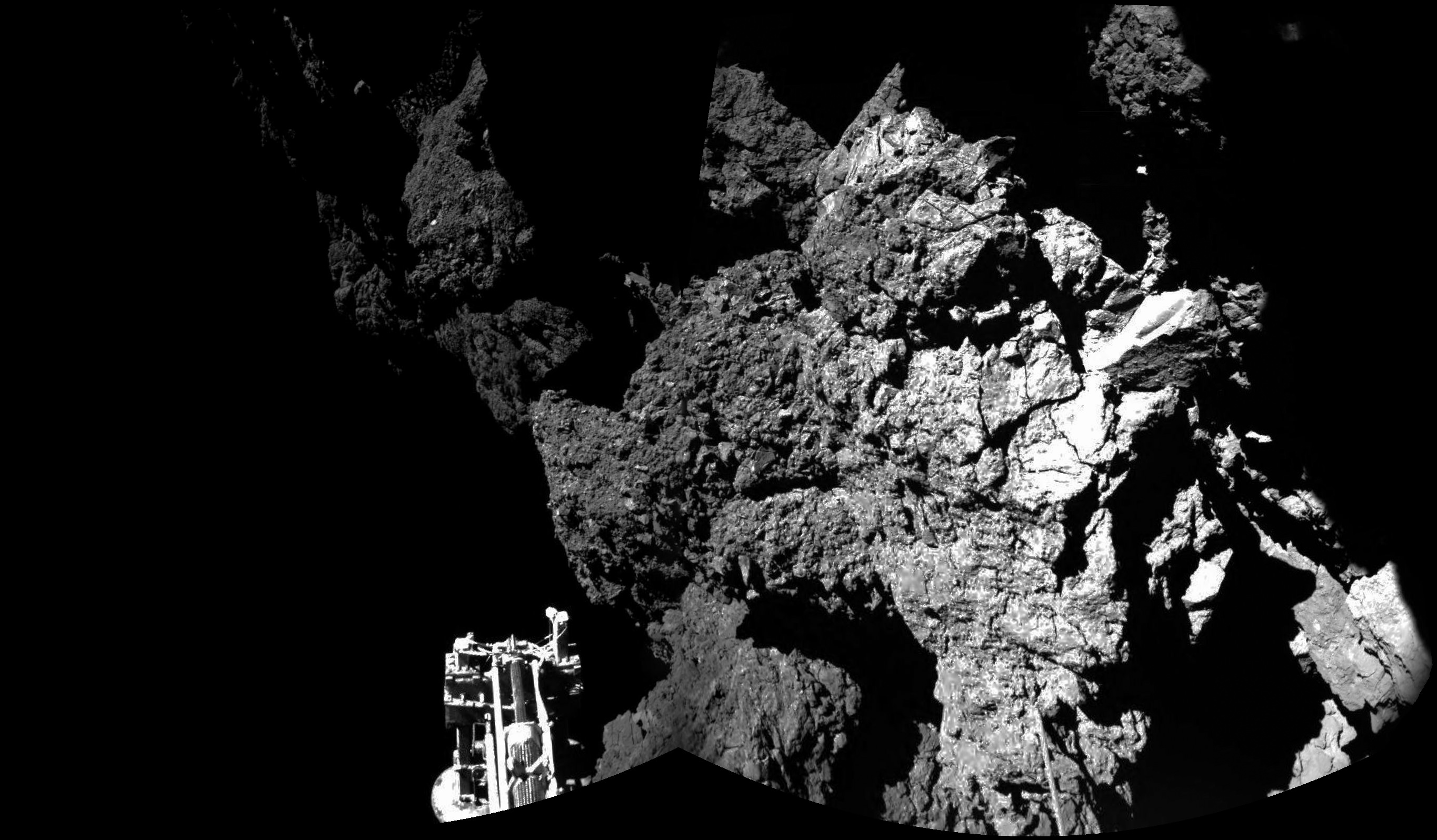
One of the lander’s three feet can be seen in the foreground in this high-resolution two-image mosaic. Credit: ESA/Rosetta/Philae/CIVA
“Philae must function on a small amount of stored energy upon arrival: 1000 watt-hours (equivalent of a 100 watt bulb running for 10 hours). Once that power is drained, it will produce a maximum of 8 watts of electricity from solar panels to be stored in a 130 watt-hour battery.” You can read more about Philae’s functions in Tim’s recent article.
Ever inventive, the lander team is going to try and nudge Philae into the sunlight by operating the moving instrument called MUPUS tonight. The operation is a delicate one, since too much movement could send the probe flying off the surface once again.
Here are additional photos from the press conference showing individual segments of the panorama and other aspects of Philae’s next-to-impossible landing. As you study the crags and boulders, consider how ancient this landscape is. 67P originated in the Kuiper Belt, a large reservoir of small icy bodies located just beyond Neptune, more than 4.5 billion years ago. Either through a collision with another comet or asteroid, or through gravitational interaction with other planets, it was ejected from the Belt and fell inward toward the Sun.
Astronomers have analyzed its orbit and discovered that up until 1840, the future comet 67P never came closer than 4 times Earth’s distance from the Sun, ensuring that its ices remained as pristine as the day they formed. After that date, the comet passed near Jupiter and its orbit changed to bring it within the inner Solar System. We’re seeing a relic, a piece of dirty ice rich with history. Even a Rosetta stone of its own we can use to interpret the molecular script revealing the origin and evolution of comets.
Philae falls to the craggy comet photographed by the Rosetta mothership. Credit: ESA
An image of Comet 67P/Churyumov–Gerasimenko at less than 10 km from its surface. This selection of previously unpublished ‘beauty shots’, taken by Rosetta’s navigation camera, presents the varied and dramatic terrain of this mysterious world from this close orbit phase of the mission. Credit: ESA.
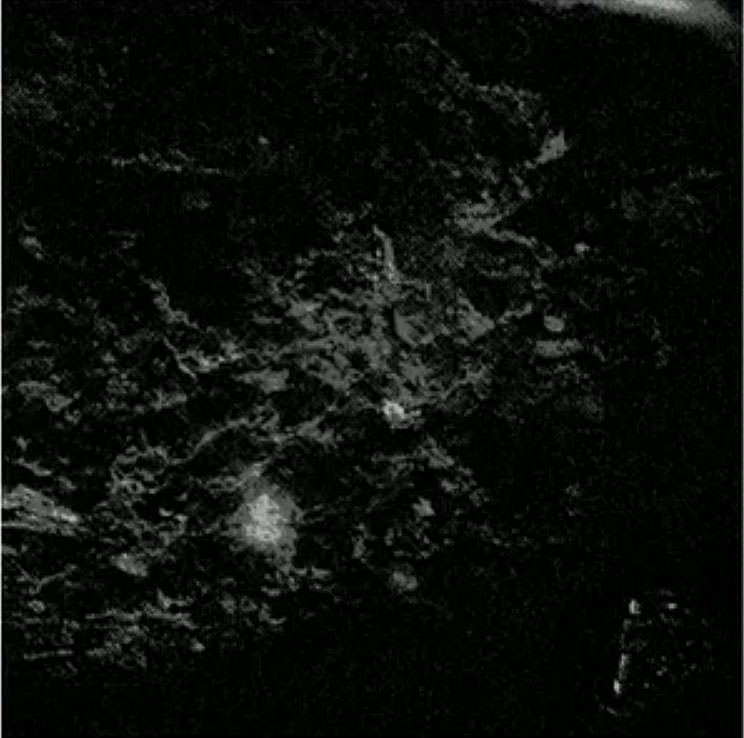
Frame from panoramic image. This has been heavily toned to reveal details in the shadow of the cliff. Credit: ESA
Frame from panoramic image. Credit: ESA
Frame from panoramic image. Credit: ESA
Frame from panoramic image. Credit: ESA
Frame from panoramic image. Credit: ESA
Image from the Philae lander as it approached the surface. The dust-covered boulder at upper right is about 5 meters (16.4 feet) across. The dust might have originated through vaporization of ice in the boulder itself or settled there from active jets elsewhere on the comet. Credit: ESA
Artist's concept of the Norther Light Lander on the Martian surface.
Credit: Mars Rocks
The first Canadian mission to Mars could be blasting off towards the Red Planet in just three years time. At least, that is what Thoth Technology, a Canadian aerospace company from Pembroke, Ontario, hopes to accomplish. And two days ago, they launched an Indiegogo campaign to raise the 1.1 million dollars needed to pay for all the hardware needed to make the mission happen.
If it is successful, it would be first Canadian mission to the surface of Mars.
The project for this Canadian mission would involve sending the Northern Light lander and Beaver rover in space and land them on Mars. Once there, the Beaver rover will be deployed and begin conducting surveys of the Martian surface, alongside the many other robotic rovers and orbiters studying the Martian landscape.
“I think it’s important to do big things,” said Ben Quine, principal investigator for the mission. “Mars is the only other habitable planet in the solar system, and if we want to survive, we need to be a multi-planet species.”
Quine is the technical director and chair of the board at Thoth Technology and a professor of space engineering at York University, which is a partner on the project, houses a lot of the space testing facilities, and will analyze the data from the mission.
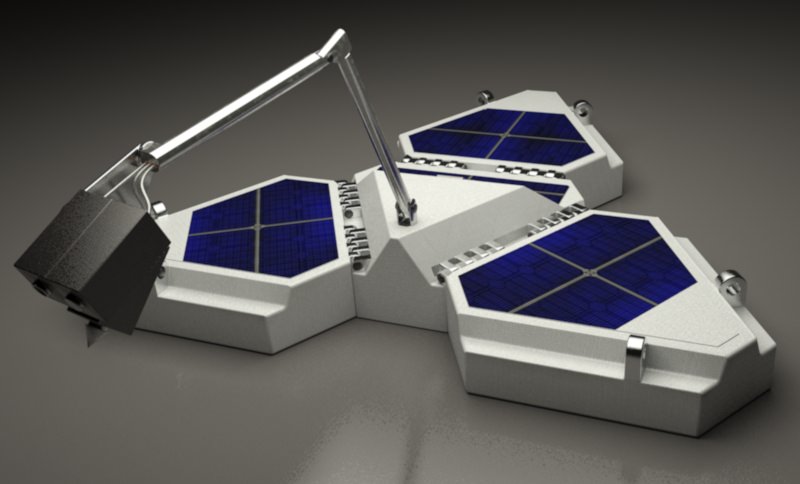
Northern Light Lander and Robotic Arm (concept art). Credit: Mars Rocks/Indiegogo
The main goal of the mission is to expand upon the efforts being made by NASA’s Curiosity, Spirit, and Opportunity rovers, which have only explored a half dozen sites on Mars. By exploring more areas, they hope to find other signs of life on the harsh landscape, and using knowledge gleaned from studies in the Canadian Arctic no less.
According to Quine, in Antarctica and the Canadian Arctic, photosynthetic microbes can be found in a layer a millimeter or two below the surface of the rock. Here, they are protected from the harshest of the sun’s UV rays, but can still use sunlight to produce energy.
Northern Light will look for similar life on Mars by using the lander’s robotic arm to grind away the surface of rocks. It will then use a device called a photometer to scan for different shades of green that may indicate the presence of photosynthetic organisms. Quine and his colleagues also hope to determine what future technologies will be required to sustain a future human presence.
“If we are serious about living on Mars,” he said, “we need to explore it much more thoroughly. We probably need hundreds of landers to pepper the surface prior to sending people so we know exactly what it is that we’re up against, where we’d find things like minerals and where we’d want to live.”
Intrinsic to the company’s plan is the widespread exploration of Mars using low cost, off-the-shelf technology. For example, the Northern Light lander probe has a mass under 50 kg (including payload) and is made of an advanced composite material that includes thermal shielding and shock absorption. The probe includes solar arrays to generate power for the instrumentation and lander avionics.
The Beaver Rover prototype. Credit: Thoth Technologies/Indiegogo
As for the Beaver rover, its small size and low-cost mask the fact that it is like no other rover that has ever gone to Mars. For one thing, it weighs just six kilograms (13 pounds). In comparison, NASA’s Curiosity rover weighs in at a hefty 900 kilograms (1980 pounds, close to an imperial ton), forcing it to rely largely on nuclear power to lug its bulk around.
The NASA rovers, which are controlled from Earth, also move very slowly and cover only a few dozen meters per day because their commands take 15 minutes to reach Mars from Earth. By contrast, the Beaver rover is designed to be quicker, in part by being more independent.
“We’re going to embed intelligence into the rover,” Quine said, “and the rover is going to be tasked to drive around and explore the environment using autonomous algorithms built into the rover to determine things like when it should make a maneuver to avoid falling into a hole or run into a rock.”
Quine said he has already spent 12 years working on the project and his team has spent half a million dollars developing and testing prototypes of the lander and micro-rover. They’ve also performed space tests on some of the instruments by flying them on satellites in low-Earth orbit.
Northern Light Ground Station at the Algonquin Radio Observatory. Credit: Mars Rocks/Indiegogo
Thoth Technologies also recently spent $1 million leasing and repairing the Algonquin Radio Observatory from the federal government, which they plan to use as a ground station to communicate with the lander and rover when they are on Mars.
As for the tricky task of getting to Mars, Quine and his colleagues hope to barter their way aboard one of the many missions heading to Mars in 2018. These include the joint Russian-European Space Agency ExoMars rover mission and an Indian Space Research Organization mission that will likely include a lander and rover.
In exchange for hitching a ride on one of these rockets, they will collect and relay other agencies’ data from Mars via the ARO ground station, which can collect them at times of day when places like Russia and India are facing away from Mars.
Those who are interested in supporting their campaign are being incentivized with a chance to help choose the landing site for the mission, and will get rewards ranging from a Frisbee for $20 or the chance to name the lander for $1 million.
The company has also launched a social campaign – featuring Ed Robertson of the “Barenaked Ladies” – urging people to create and upload their own “Mars dance” video to marsrocks.ca.
To find out more, check out their promotional video or click on the link below: