Universe Today
Home
Videos
Podcast
Newsletter
Join the Club
RSS Feed
Unknown Author
Recent Articles
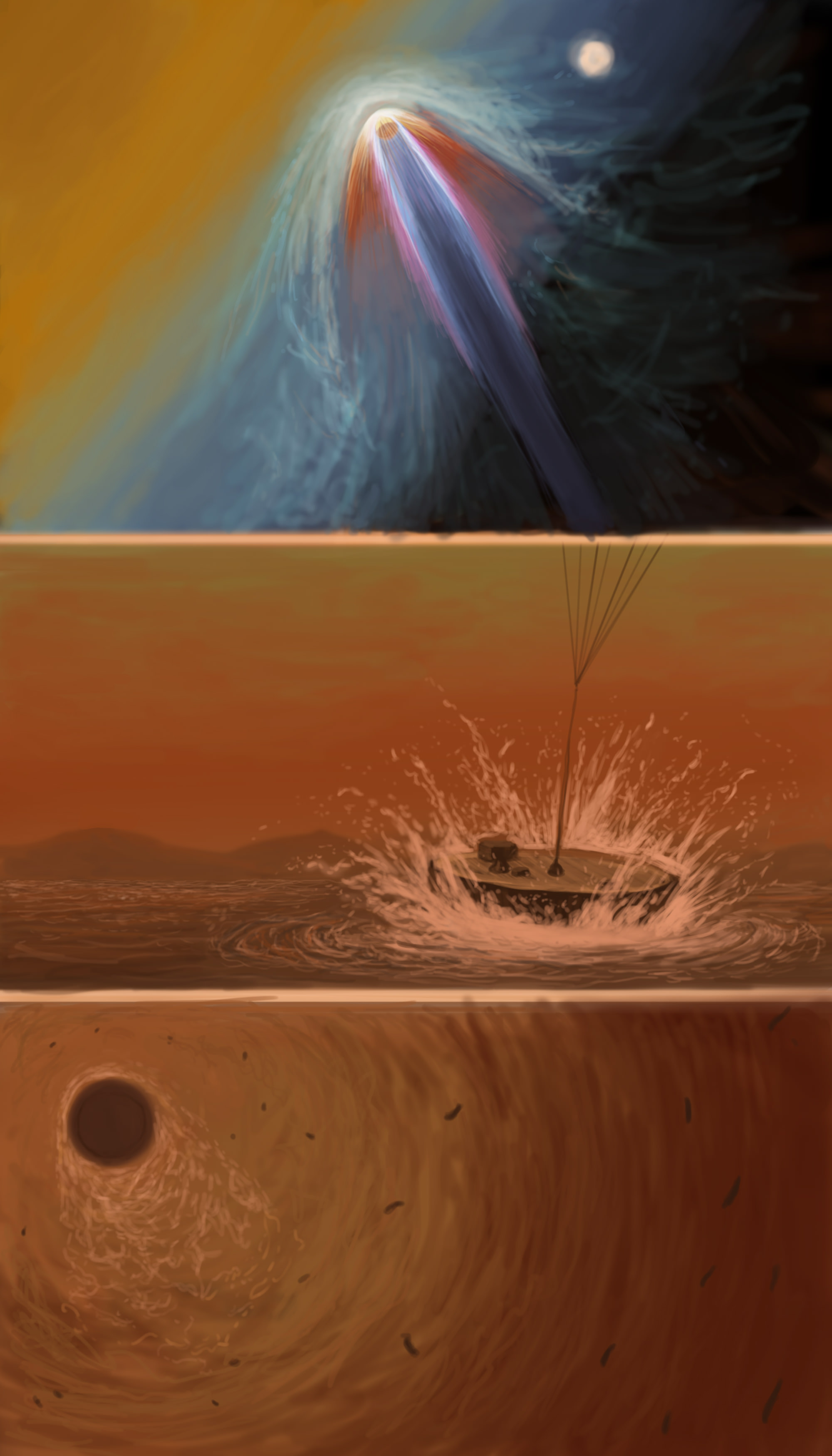
Let's Put a Sailboat on Titan
April 15, 2014
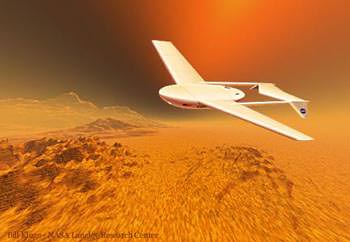
What's the Best Design for a Flying Mars Robot?
July 17, 2013