Nature forces lifeforms to adapt to its conditions. That is a basic fact behind natural selection. From that perspective, it makes sense for engineers to learn from creatures that have adapted.
This is true of robotics, as researchers use biomimicry to overcome problems. In the case of Mars rovers, we've relied on wheeled vehicles to traverse the planet's surface. Now German researchers are using an unusual animal's locomotion system to inform the design of new rover wheels. The animal in question is called the sandfish skink. The sandfish skink is a species of lizard known for its ability to travel through sand as if its swimming.
A team of researchers at University of Würzburg have been working on rover wheels that mimic the sandfish's ability to swim through sand. Prof. Marco Schmidt leads the Embedded Systems and Sensors for Earth Observation (ESSEO) group at Julius Maximilian University of Würzburg. It's part of the VaMEx initiative of the German Aerospace Centre.
"Conventional wheel designs are often optimised for driving at low speeds and tend to slip, sink or get stuck on soft ground," says Amenosis Lopez, a researcher working with Professor Schmidt.
Since the new wheels don't really roll, they don't struggle as much, and outperform typical wheel designs in testing.
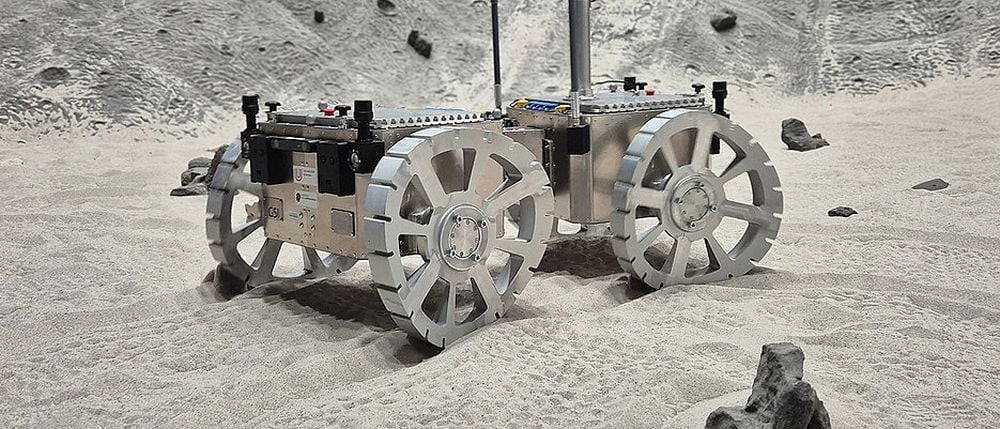
"The wheels mimic the animal’s characteristic interaction with the ground, generating both longitudinal and lateral forces," Lopez said. "The rover leaves sinusoidal tracks in the sand – this confirms that the intended swimming mechanism has been achieved."
“The experiments also provided us with clear pointers for improvements,” said Professor Schmidt. The first sandfish wheels were both narrower and heavier than conventional wheels, and they tended to slip and to sink into the sand. But the new design overcomes these problems by being both lighter and wider, leading to the improved performance on sand.
But Mars rovers have more than just sand to contend with. There's also rocky terrain, pebbled terrain, and mixed terrain. Making the sandfish wheels perform on all of these surfaces is a work in progress.
“Further refinements to the wheel surface are likely to further improve performance on mixed terrain,” the researchers explained.
The Rosalind Franklin rover is the ESA's next mission to Mars, and it's scheduled to launch in 2028. But since that rover design is already finalized, it won't use the swimming sandfish wheels.
Beyond that, the ESA is targeting another mission to the Martian surface in 2035. This is the most favourable launch date in the next decade because of Earth's and Mars' relative positions to each other. The ESA and its member states are in the very early stages of developing this mission, and as things stand now, the ESA has never successfully landed a spacecraft on Mars.
This future mission is aimed at developing key technologies for precision landings, so that will take priority. But if the ESA does succeed and successfully land a rover on Mars, there's a chance it will feature the sandfish wheels. By that time, the design should be perfected.