
Planetary exploration, specifically within our own Solar System, has provided a lifetime of scientific knowledge about the many worlds beyond Earth. However, this exploration, thus far, has primarily been limited to orbiters and landers/rovers designed for surface exploration of the celestial bodies they visit. But what if we could explore subsurface environments just as easily as we've been able to explore the surface, and could some of these subsurface dwellings not only shelter future astronauts, but host life, as well?
These are questions that a team of researchers at the University of Arizona (UArizona) hope to answer as they examine new technologies that could potentially aid both human and robotic exploration of planetary subsurface environments, including lava tubes, lava caves, and even subsurface oceans. This research comes at a particularly unique time with the NASA Artemis missions preparing to send humans back to the Moon in 2025, then hopefully to Mars, someday.
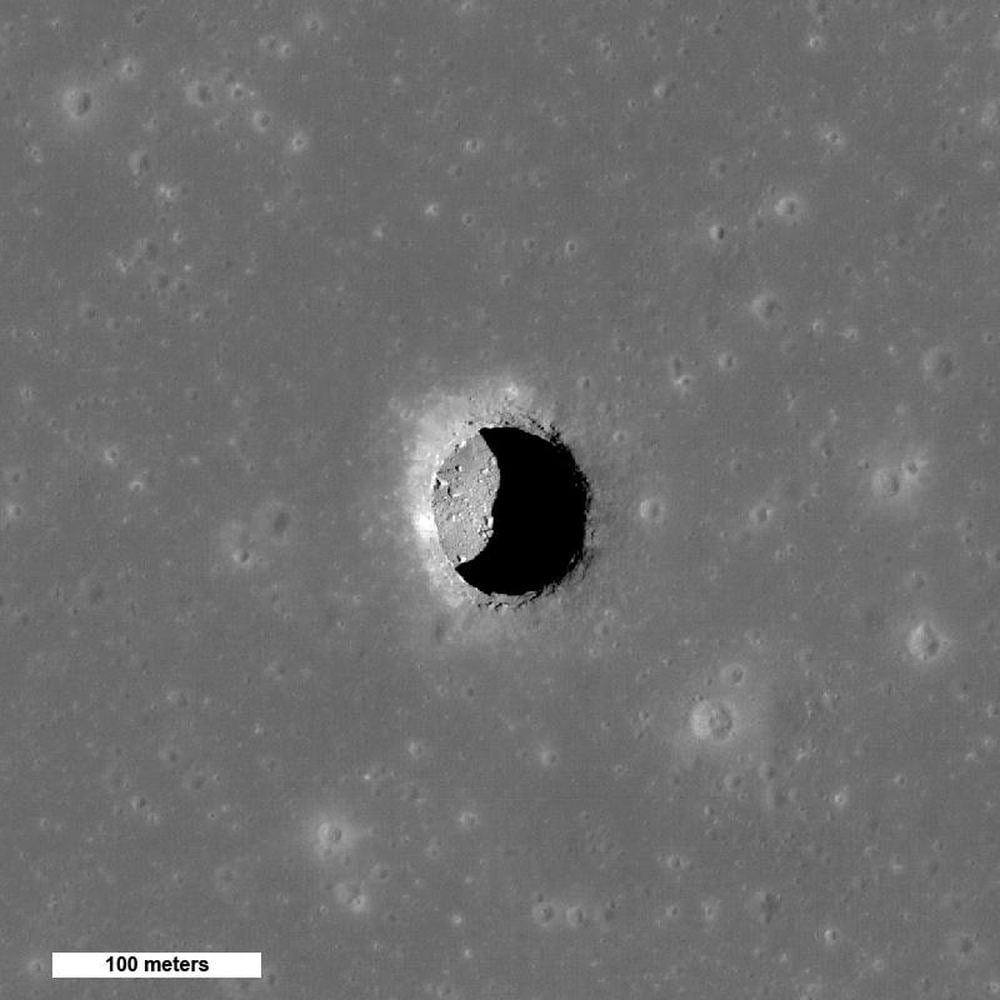
"Lava tubes and caves would make perfect habitats for astronauts because you don't have to build a structure; you are shielded from harmful cosmic radiation, so all you need to do is make it pretty and cozy," said Dr. Wolfgang Fink, who is an associate professor of electrical and computer engineering at UArizona, and lead author of the study.
For the study, the researchers introduced a dynamically deployed communication network (DDCN) that wirelessly connects robot explorers through a mesh topology network which not only lets each robot explorer work autonomously, but also as a team, as the network grants them unfettered communication with each other. This type of system is essential since the geological structure being explored might not be able to relay radio signal commands from astronauts on the outside to the robot explorers on the inside, so an autonomous system could be the best option to achieve mission success. The researchers refer to the DDCN as "a Hansel & Gretel-inspired breadcrumb style" communication network based on the how the system is used.
"If you remember the book, you know how Hansel and Gretel dropped breadcrumbs to make sure they'd find their way back," explained Dr. Fink, who is also the founder and director of the Visual and Autonomous Exploration Systems Research Laboratory at Caltech and UArizona. "In our scenario, the 'breadcrumbs' are miniaturized sensors that piggyback on the rovers, which deploy the sensors as they traverse a cave or other subsurface environment."
Along with the prospects to act as shelter for astronauts, lava tubes and lava caves could also pose astrobiological relevance, as well, as a 2020 paper suggested potential life could evolve within such environments that are shielded from the harsh cosmic radiation.

This study builds on previous research undertaken by Dr. Fink known as tier-scalable reconnaissance, with this study creating a sort of chain of command for the robot explorers without input from human controllers. For example, an orbiter would autonomously control a blimp that's traversing the surface, which autonomously controls one or more rovers or landers conducting tasks directly on the ground.
Such an autonomous, chain of command-like system is already being tested on NASA's Perseverance rover as it commands its helicopter counterpart, Ingenuity. A proposed mission to explore Saturn's moon, Titan, could have potentially involved this autonomous system and would have involved an orbiter, balloon, and lander to explore Titan's hydrocarbon, methane seas. Unfortunately, the mission was not selected due to funding.
Despite not being selected, the proposed Titan mission demonstrates one of the benefits of the breadcrumb-style approach in that the robotic explorers using this method are able to explore both underground and underwater. Dr. Fink noted that while this technology could prove useful for search and rescue efforts for natural disasters, he also said one of the biggest challenges is transmitting the data from the subsurface environment back to the surface. But the purpose of the DCCN concept is to overcome this issue.
"Once deployed, our sensors automatically establish a nondirected mesh network, which means each node updates itself about each node around it," said Dr. Fink, who first presented the DDCN idea in a 2019 proposal to NASA.
"They can switch between each other and compensate for dead spots and signal blackouts," said Dr. Mark A. Tarbell, senior research scientist in Dr. Fink's laboratory, and a co-author on the study. "If some of them die, there still is connectivity through the remaining nodes, so the mother rover never loses connection to the farthest node in the network."
For underwater robotic explorers, the lander above the surface—whether floating on a Titan lake or resting on the ice of Europa—would be connected to the submersible via a long cable with communications nodes that could boost any signal trying to get back to the lander. The individual nodes could also have the capability to collect data on their own, such as temperature, pressure, and salinity, and take the data into the cable and send it back to the lander, notes Dr. Fink.

"Imagine you make it all the way to Europa, you melt your way through miles of ice, make it down to the subsurface ocean, where you find yourself surrounded by alien life, but you have no way of getting data back to the surface," said Dr. Fink. "That's the scenario we need to avoid."
There have been several proposals for sending a lander and even a submersible to Europa, but nothing has been approved as of yet.
How will lava tubes assist in future human and robotic exploration as humanity ventures out farther into the cosmos, and could these subsurface environments host life? Only time will tell, and this is why we science!
As always, keep doing science & keep looking up!