
The mole is still stuck.
The mole is the name given to the Heat Flow and Physical Properties Package (HP3) instrument on NASA's Mars InSight lander. It's job is to penetrate into the Martian surface to a depth of 5 meters (16 ft) to measure how heat flows from the planet's interior to the surface. It's part of InSight's mission to understand the interior structure of Mars, and how it formed.
But it's stuck at about 35 centimers (14 inches.) The mole can do science shy of its maximum depth of 5 meters, but not this shallow. And NASA, and the DLR (German Aerospace Center) who provided the mole, have a new plan to fix it.
The mole doesn't drill its way into Mars, it hammers its way in. But its method of hammering requires enough friction between the mole and the walls of the hole it creates as it penetrates. According to NASA, that friction isn't there.
It could be because of rocks, but it might be because of the nature of the soil itself. But either way it's a problem, even though InSight team members were very careful when they chose the mole's deployment spot. In April, Torben Wippermann, Test Leader at the DLR Institute of Space Systems said, "We are investigating and testing various possible scenarios to find out what led to the 'Mole' stopping."
After a lot of work in test beds here on Earth with working models of InSight, NASA and the DLR have a plan. They're pretty sure that the lack of friction between the soil and the mole is the problem. They intend to use the scoop on the end of the lander's robotic arm to push it against the wall of the hole.
"We're going to try pressing the side of the scoop against the mole, pinning it to the wall of its hole," said InSight Deputy Principal Investigator Sue Smrekar of NASA's Jet Propulsion Laboratory in Pasadena, California. "This might increase friction enough to keep it moving forward when mole hammering resumes."
The arrived at this potential solution by studying the situation carefully. They only had one shot at deploying the mole, because of its design. So there's no way of removing the mole and trying another spot. If that were possible, they'd have done that back in the Spring.
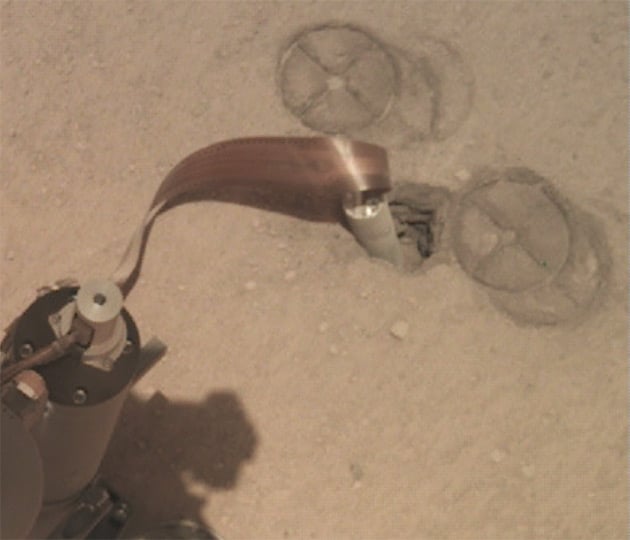
But the mole has a support structure, designed to hold the mole steady as it hammers away. InSight was able to remove the structure, at least, and get a glimpse inside the hole with camera's on the robotic arm. They found that below the surface there appears to be 5 to 10 centimeters (2 to 4 inches) of duricrust, a kind of cemented soil thicker than anything encountered on other Mars missions and different from the soil the mole was designed for.
In the summer, the InSight team used the scoop on the arm to try to compress the soil around the mole, giving it the friction it needs to keep penetrating.
Unfortunately, that didn't work. "We're asking the arm to punch above its weight," said Ashitey Trebi-Ollennu, the lead arm engineer at JPL. "The arm can't push the soil the way a person can. This would be easier if it could, but that's just not the arm we have."
The problem is the distance between the lander and the mole. Mission scientists spent a long time deciding where exactly to deploy the mole. They chose a spot that they hoped wouldn't have any underground obstacles, even though there was no way of knowing for sure what would be underground. Their chosen spot was at the reach distance of the lander's robotic arm.
But now they need the scoop on the end of the arm to press against the mole, pinning it to the side of the hole. And because the mole is near the end of the arm's reach, the angle of the scoop prevents the arm pushing with much force. It might not be enough.
"All we know about the soil is what we can see in images InSight sends us," said Tilman Spohn, HP3's principal investigator at DLR. "Since we can't bring the soil to the mole, maybe we can bring the mole to the soil by pinning it in the hole."
There's no way of knowing if the pinning strategy will work. But if it doesn't, there's at least one more thing they can try.
Right now the team is testing the technique of using the scoop to push extra soil into the mole's hole. That might be easier than trying to compress the hole, which is at the limit of the arm's strength.
Stay tuned to this story. All of the drama will be relayed to us in images from the robotic arm's instrument deployment camera.