Book Excerpt: “Incredible Stories From Space,” Roving Mars With Curiosity, part 3
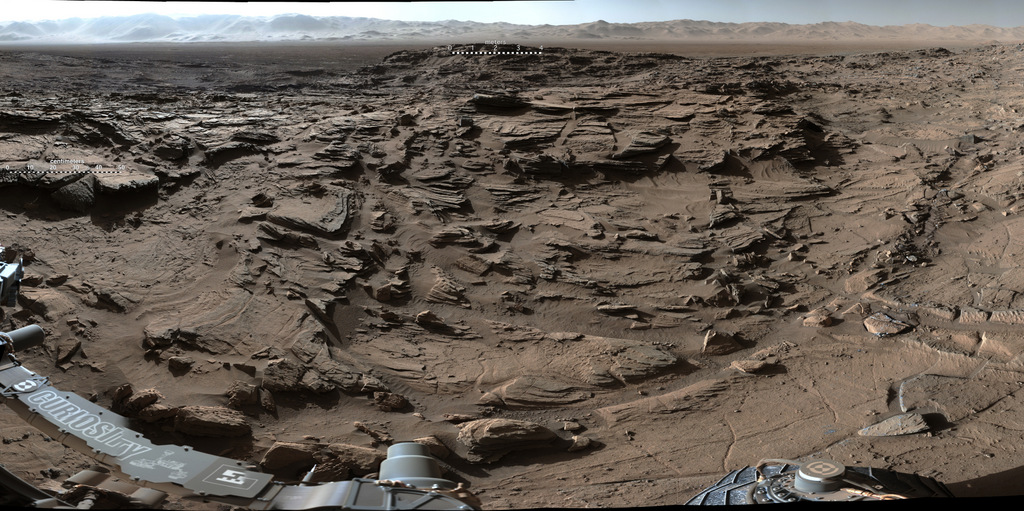
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
Following is the final excerpt from my new book, “Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos.” The book is an inside look at several current NASA robotic missions, and this excerpt is part 3 of 3 posted here on Universe Today, of Chapter 2, “Roving Mars with Curiosity.” You can read Part 1 here, and Part 2 here. The book is available in print or e-book (Kindle or Nook) Amazon and Barnes & Noble.
How to Drive a Mars Rover
How does Curiosity know where and how to drive across Mars’ surface? You might envision engineers at JPL using joysticks, similar to those used for remote control toys or video games. But unlike RC driving or gaming, the Mars rover drivers don’t have immediate visual inputs or a video screen to see where the rover is going. And just like at the landing, there is always a time delay of when a command is sent to the rover and when it is received on Mars.
“It’s not driving in a real-time interactive sense because of the time lag,” explained John Michael Morookian, who leads the team of rover drivers.
The actual job title of Morookian and his team are ‘Rover Planners,’ which precisely describes what they do. Instead of ‘driving’ the rovers per se; they plan out the route in advance, program specialized software, and upload the instructions to Curiosity.
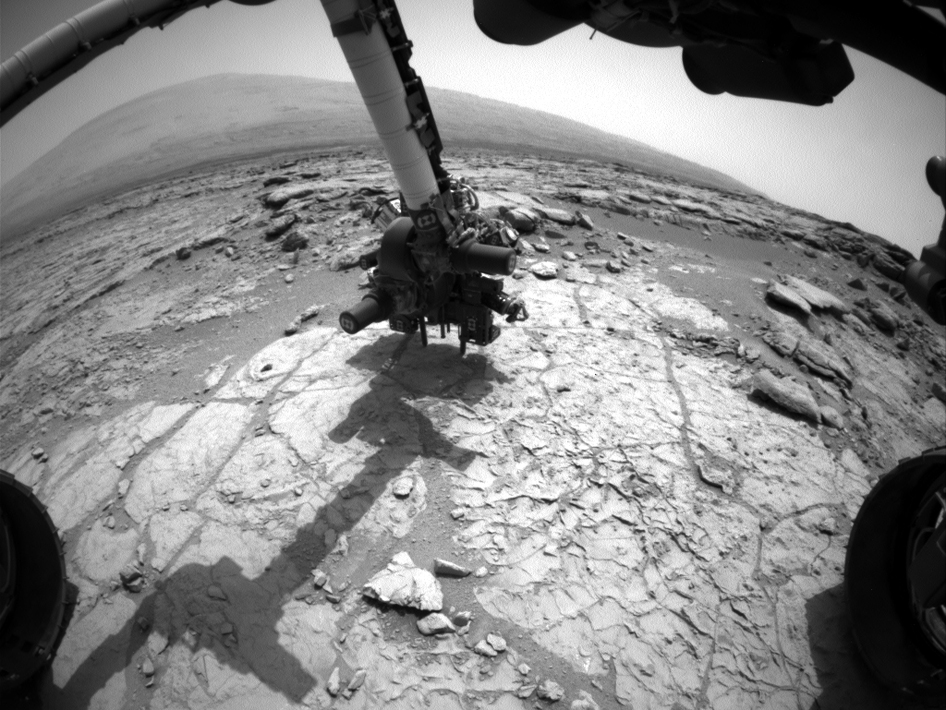
“We use images taken by the rover of its surroundings,” said Morookian. “We have a set of stereo images from four black-and-white Navigation Cameras, along with images from the Hazcams (hazard avoidance cameras), supported by high-resolution color images from the MastCam that give us details about the nature of the terrain ahead and clues about types of rocks and minerals at the site. This helps identify structures that look interesting to the scientists.”
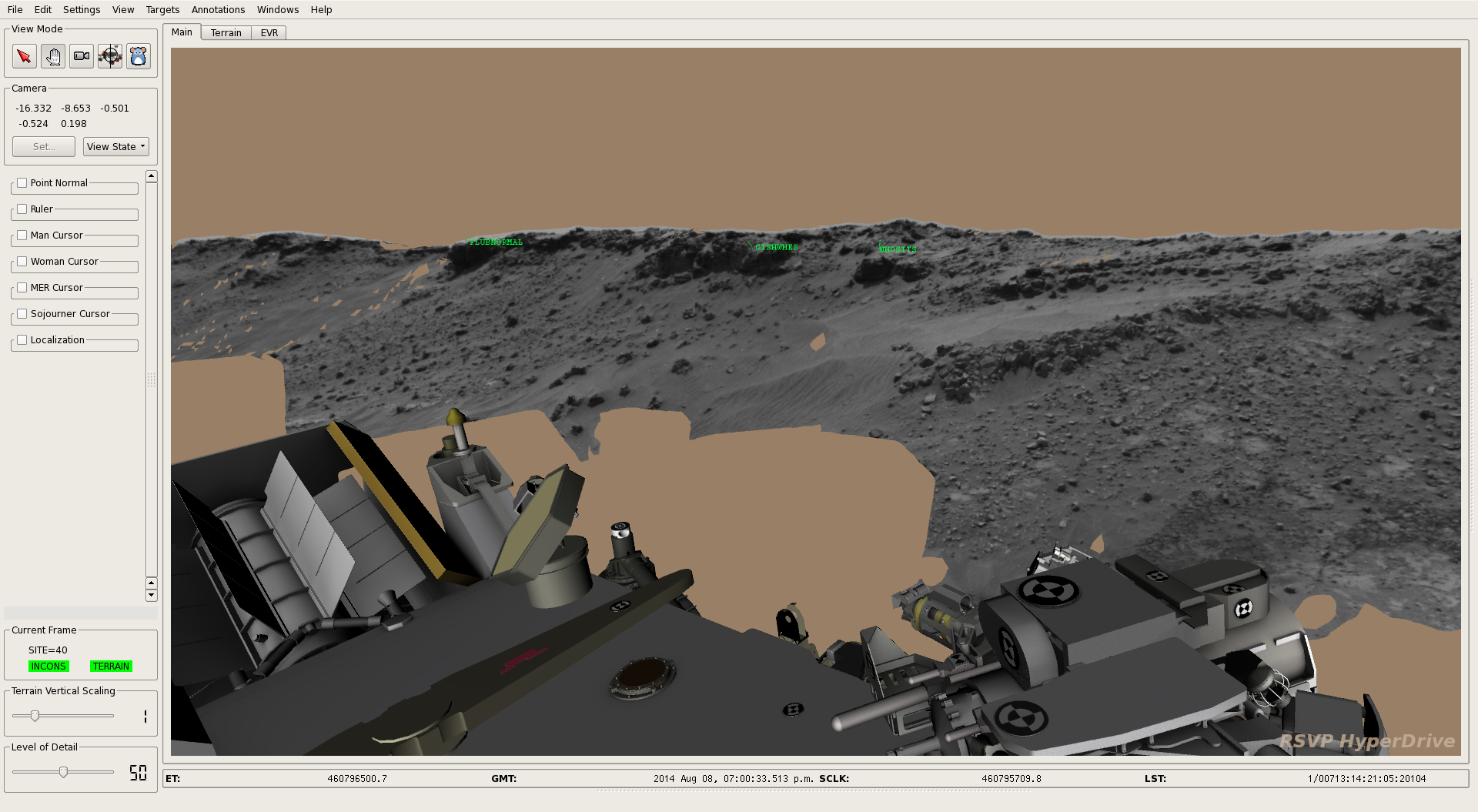
Using all available data, they can create a three-dimensional visualization of the terrain with specialized software called the Rover Sequencing and Visualization Program (RSVP).
“This is basically a Mars simulator and we put a simulated Curiosity in a panorama of the scene to visualize how the rover could traverse on its path,” Morookian explained. “We can also put on stereo glasses, which allow our eyes to see the scene in three dimensions as if we were there with the rover.
In virtual reality, the rover drivers can manipulate the scene and the rover to test every possibility of which routes are the best and what areas to avoid. There, they can make all the mistakes (get stuck in a dune, tip the rover, crash into a big rock, drive off a precipice) and perfect the driving sequence while the real rover remains safe on Mars.
“The scientists also review the images for features that are interesting and consult with the Rover Planners to help define a path. Then we compose the detailed commands that are necessary to get Curiosity from Point A to Point B along that path,” Morookian said. “”We can also incorporate the commands needed to give the rover direction to make contact with the site using its robotic arm.”
So, every night the rover is commanded to shut down for eight hours to recharge its batteries with the nuclear generator. But first Curiosity sends data to Earth, including pictures of the terrain and any science information. On Earth, the Rover Planners take that data, do their planning work, complete the software programing and beam the information back to Mars. Then Curiosity wakes up, downloads the instructions and sets to work. And the cycle repeats.
Curiosity also has an AutoNav feature which allows the rover to traverse areas the team hasn’t seen yet in images. So, it could go over the hill and down the other side to uncharted territory, with the AutoNav sensing potential hazards.
“We don’t use it too often because it is computationally expensive, meaning it takes much longer for the rover to operate in that mode,” Morookian said. “We often find it’s a better trade to just come in the next day, look at the images and drive as far as we can see.”
As Morookian showed me the various rooms used by rover planning teams at JPL, he explained how they need to operate over a number of different timescales.
“We not only have the daily route planning,” he said, “but also do long-range strategic planning using orbital imagery from the HiRISE camera on the Mars Reconnaissance Orbiter and choose paths based on features seen from orbit. Our team works strategically, looking many months out to define the best paths.”
Another process called Supra-Tactical looks out to just the next week. This involves science planners managing and refining the types of activities the rover will be doing in the short term. Also, since no one on the team lives on Mars Time anymore, on Fridays the Rover Planners work out the plans for several days.
“Since we don’t work weekends, Friday plans contain multiple sols of activities,” Morookian said. “Two parallel teams decide which days the rover will drive and which days it will do other activities, such as work with the robotic arm or other instruments.”
The data that comes down from the rover over the weekend is monitored, however, and if there is a problem, a team is called in to do a more detailed assessment. Morookian indicated they’ve had to engage the emergency weekend team several times, but so far there have been no serious problems. “It does keep us on our toes, however,” he said.
The rover features a number of reactive safety checks on the amount of overall tilt of the rover deck and the articulation of the suspension system of the wheels, so if the rover is going over an object that is too large, it will automatically stop.
Curiosity wasn’t built for speed. It was designed to travel up to 660 feet (200 meters) in a day, but it rarely travels that far in a Sol. By early 2016 the rover had driven a total of about 7.5 miles (12 km) across Mars’ surface.
There are several ways to determine how far Curiosity has traveled, but the most accurate measurement is called ‘Visual Odometry.’ Curiosity has specialized holes in its wheels in the shape of Morse code letters, spelling out ‘JPL’ – a nod to the home of the rover’s science and engineering teams – across the Martian soil.
“Visual odometry works by comparing the most recent pair of stereo images collected roughly every meter over the drive,” said Morookian. “Individual features in the scene are matched and tracked to provide a measure of how the camera (and thus the rover) has translated and rotated in 3 dimensional space between the two images and it tells us in a very real sense how far Curiosity has gone.”
Careful inspection of the rover tracks can reveal the type of traction the wheels have and if they have slipped, for instance due to high slopes or sandy ground.
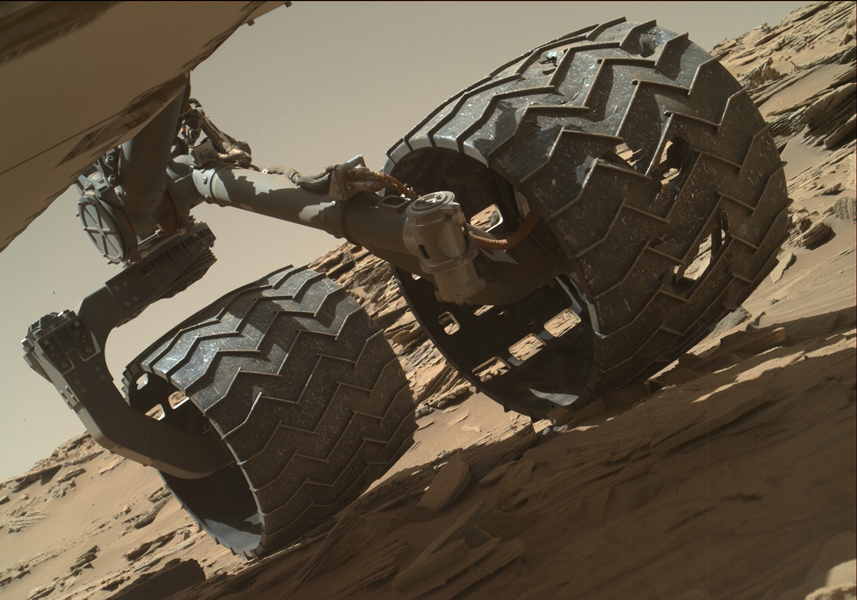
Unfortunately, Curiosity now has new holes in its wheels that aren’t supposed to be there.
Rover Problems
Morookian and Project Scientist Ashwin Vasavada both expressed relief and satisfaction that overall — this far into the mission — Curiosity is a fairly healthy rover. The entire science payload is currently operating at nearly full capability. But the engineering team keeps an eye on a few issues.
“Around sol 400, we realized the wheels were wearing faster than we expected,” Vasavada said.
And the wear didn’t consist of just little holes; the team started to see punctures and nasty tears. Engineers realized the holes were being created by the hard, jagged rocks the rover was driving over during that time.
“We weren’t fully expecting the kind of ‘pointy’ rocks that were doing damage,” Vasavada said. “We also did some testing and saw how one wheel could push another wheel into a rock, making the damage worse. We now drive more carefully and don’t drive as long as we have in the past. We’ve been able to level off the damage to a more acceptable rate.”
Early in the mission, Curiosity’s computer went into ‘safe mode’ several times, as Curiosity’s software recognized a problem, and the response was to disallow further activity and phone home.
Specialized fault protection software runs throughout the modules and instruments, and when a problem occurs, the rover stops and sends data called ‘event records’ to Earth. The records include various categories of urgency, and in early 2015, the rover sent a message that essentially said, “This is very, very bad.” The drill on the rover’s arm had experienced a fluctuation in an electrical current – like a short circuit.
“Curiosity’s software has the ability to detect shorts, like the ground fault circuit interrupter you have in your bathroom,” Morookian explained, “except this one tells you ‘this is very, very bad’ instead of just giving you a yellow light.”
Since the team can’t go to Mars and repair a problem, everything is fixed either by sending software updates to the rover or by changing operational procedures.
“We are just more careful now with how we use the drill,” Vasavada said, “and don’t drill with full force at the beginning, but slowly ramp up. It’s sort of like how we drive now, more gingerly but it still gets the job done. It hasn’t been a huge impact as of yet.”
A lighter touch on the drill also was necessary for the softer mudstones and sandstones the rover encountered. Morookian said there was concern the layered rocks might not hold up under the assault of the standard drilling protocol, and so they adjusted the technique to use the lowest ‘settings’ that still allows the drill to make sufficient progress into the rock.
But opportunities to use the drill are increasing as Curiosity begins its traverse up the mountain. The rover is traveling through what Vasavada calls a “target rich, very interesting area,” as the science team works to tie together the geological context of everything they are seeing in the images.
Finding Balance on Mars
While the diversion at Yellowknife Bay allowed the team to make some major discoveries, they felt pressure to get to Mt. Sharp, so “drove like hell for a year,” Vasavada said.
Now on the mountain, there is still the pressure to make the most of the mission, with the goal of making it through at least four different rock units – or layers — on Mt. Sharp. Each layer could be like a chapter in the book of Mars’ history.
“Exploring Mt. Sharp is fascinating,” Vasavada said, “and we’re trying to maintain a mix between really great discoveries, which – you hate to say — slows us down, and getting higher on the mountain. Looking closely at a rock in front of you means you’ll never be able to go over and look at that other interesting rock over there.”
Vasavada and Morookian both said it’s a challenge to preserve that balance every day — to find what’s called the ‘knee in the curve’ or ‘sweet spot’ of the perfect optimization between driving and stopping for science.
Then there’s the balance between stopping to do a full observation with all the instruments and doing ‘flyby science’ where less intense observations are made.
“We take the observations we can, and generate all the hypotheses we can in real time,” Vasavada said. “Even if we’re left with 100 open questions, we know we can answer the questions later as long as we know we’ve taken enough data.”
Curiosity’s primary target is not the summit, but instead a region about 1,330 feet (400 meters) up where geologists expect to find the boundary between rocks that saw a lot of water in their history, and those that didn’t. That boundary will provide insight into Mars’ transition from a wet planet to dry, filling in a key gap in the understanding of the planet’s history.
No one really knows how long Curiosity will last, or if it will surprise everyone like its predecessors Spirit and Opportunity. Having made it past the ‘prime mission’ of one year on Mars (two Earth years), and now in the extended mission, the one big variable is the RTG power source. While the available power will start to steadily decrease, both Vasavada and Morookian don’t expect that to be in an issue for at least four more Earth years, and with the right “nurturing,” power could last for a dozen years or more.
But they also know there’s no way to predict how long Curiosity will go, or what unexpected event might end the mission.
The Beast
Does Curiosity have a personality like the previous Mars rovers?
“Actually no, we don’t seem to anthropomorphize this rover like people did with Spirit and Opportunity,” Vasavada said. “We haven’t bonded emotionally with it. Sociologists have actually been studying this.” He shook his head with an amused smile.
Vasavada indicated it might have something to do with Curiosity’s size.
“I think of it as a giant beast,” he said straight-faced. “But not in a mean way at all.”
What has come to come to characterize this mission, Vasavada said, is the complexity of it, in every dimension: the human component of getting 500 people to work and cooperate together while optimizing everyone’s talents; keeping the rover safe and healthy; and keeping ten instruments going every day, which are sometimes doing completely unrelated science tasks.
“Every day is our own little ‘seven minutes of terror,’ where so many things have to go right every single day,” Vasavada said. “There are a million potential issues and interactions, and you have to constantly be thinking about all the ways things can go wrong, because there are a million ways you can mess up. It’s an intricate dance, but fortunately we have a great team.”
Then he added with a smile, “This mission is exciting though, even if it’s a beast.”
“Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos” is published by Page Street Publishing, a subsidiary of Macmillan.
Recent Posts
Update your Desktop Wallpaper with 25 New Images from Chandra
It’s not always possible to observe the night sky from the surface of the Earth.…
SpaceX Resumes Falcon 9 Rocket Launches After FAA Go-Ahead
SpaceX is flying again after the Federal Aviation Administration ruled that the company can resume…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Is This How You Get Hot Jupiters?
When we think of Jupiter-type planets, we usually picture massive cloud-covered worlds orbiting far from…
Now Uranus’ Moon Ariel Might Have an Ocean too
Venus is known for being really quite inhospitable with high surface temperatures and Mars is…
Why is JWST Having So Much Trouble with the TRAPPIST-1 System?
When the James Webb Space Telescope was launched it came with a fanfare expecting amazing…
Planetary Habitability Depends on its Star’s Magnetic Field
The extrasolar planet census recently passed a major milestone, with 5500 confirmed candidates in 4,243…