
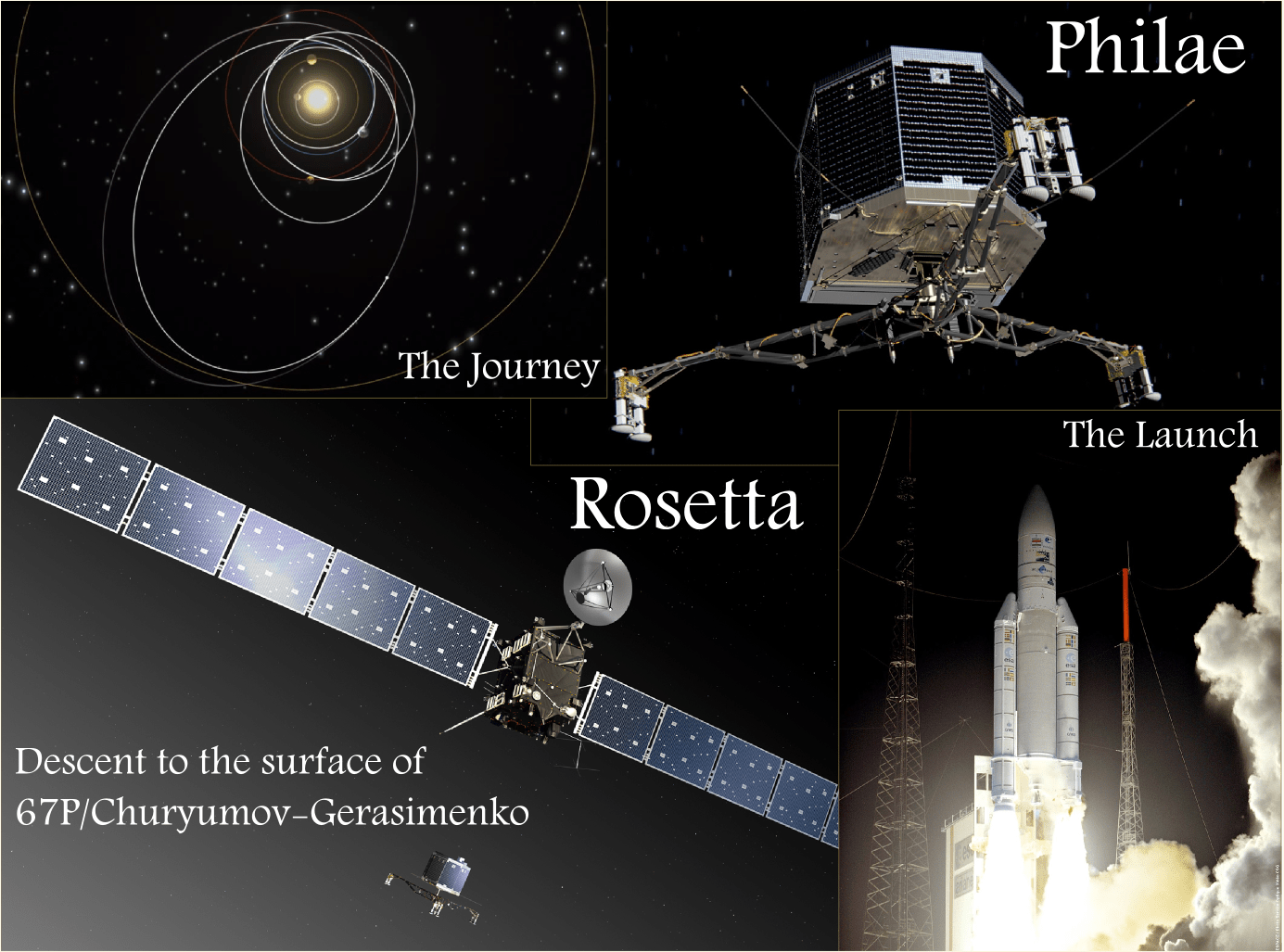
ESA has announced that on September 15, the team from the Rosetta mission will reveal the landing site for the Philae lander. After traveling on a 10-year, 6.4 billion kilometer journey, Rosetta has been gently captured by comet 67P/Churyumov-Gerasimenko, an oddly-shaped and mysterious two-lobed comet. Yet, how will the small Philea attempt the landing? Very carefully, because a second chance is not possible. Philae cannot pull up and try again.
In contrast to NASA’s Deep Impact mission which directed a high speed impactor onto the surface of comet Tempel 1, ESA’s Philae lander is designed to execute the first soft landing. The landing must be as gentle as any landing that a respectable bird might accomplish. Philae’s nominal landing speed is about 1.0 meter/sec, that is, 2.2 mph. But like the Deep Impact impactor, Philae is flying solo. Software onboard will function alone without assistance from ground control.
The circumstances surrounding this momentous event – the first landing on a comet – has quite an amazing history and geography. Philae is truly a European Union mission with the design distributed across Europe, spanning from Hungary to Finland to Spain, Ireland to Italy and including UK and Germany.
As is common, the project development spanned several years. A sample return mission was considered the next step after ESA’s Giotto mission that studied Halley’s Comet, but Rosetta evolved out of the cancelled NASA mission Comet Rendezvous Asteroid Flyby (CRAF). ESA could not afford a sample return mission on its own, so Rosetta used the CRAF design but without sample return. Instead it would rendezvous and orbit a comet and include a lander.
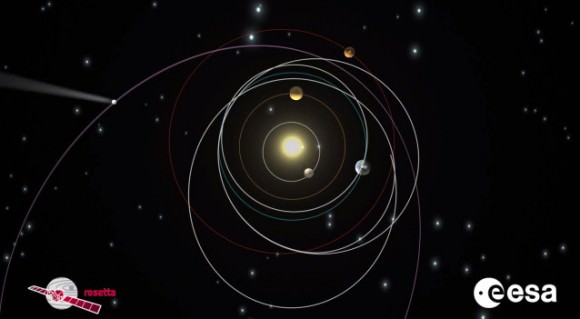
Rosetta’s mission began on March 2, 2004 from the Guiana Space Centre in French Guiana and it now flies quietly alongside a comet 400 million kilometers from Earth. 67p is falling towards the Sun and perihelion will be on August 13, 2015.

The technology of Philae is 1990s technology. However, the landing mechanisms may not be much different if designed today. Consider that the 7 minutes of terror – Entry, Descent and Landing of the Mars Rovers (MER) was also accomplished with 1990s computer hardware and you can express some relief and assurance that such technology is up to the task of landing on a comet.

How will the team make their choice of landing spots? The performance specifications of the lander and the mechanisms it can employ to attach to the surface sets definite constraints on the choice of landing location.
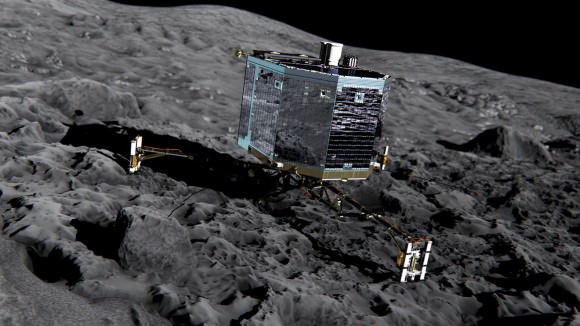
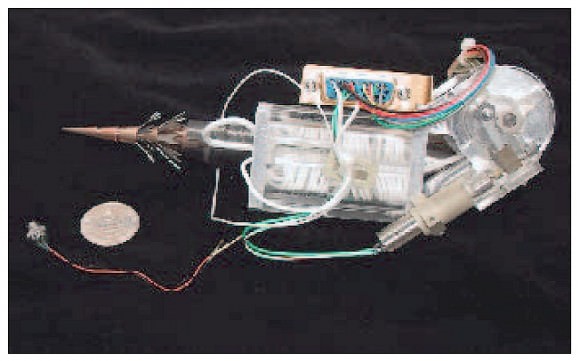
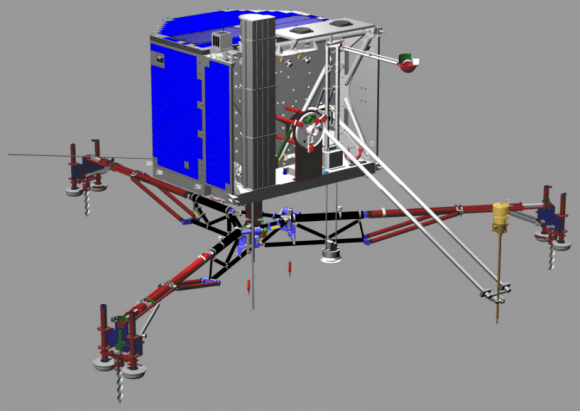
The landing mechanisms are: landing legs with ice screws, propulsion system and harpoons. The legs were designed with the intent of landing softly. The harpoons are designed to secure Philae to the surface. The gravity of the comet is so weak, Philae could bounce off the surface or roll over. The purpose of the harpoons — to be fired at the moment of contact — is to prevent bouncing off the surface or tipping over. The direction and strength of gravity at the landing site will not be absolutely known so there is the risk of roll over after landing, albeit very slowly. Tipping over is mitigated by screws under the footpads to penetrate the surface immediately after landing.
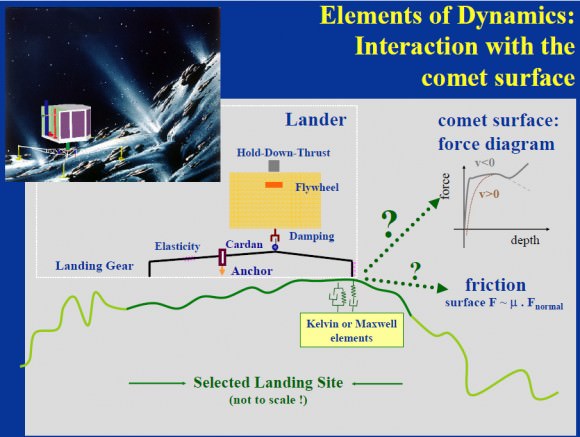
Philae also has a flywheel for stabilization during descent and landing and a dampening system between the landing legs’ carriage and the probe’s body. The dampener is meant to make the landing inelastic — meaning no bouncing. However, there is a set limit to how much the probe’s body can tilt (or twist) upon surface contact. Any tilt will impose a rotating force on the probe which will need to be countered by the propulsion pushing down and the harpoons. Philae does not carry a stick of bubble gum or any duct tape, which have been known by Earthlings to come in handy in a pinch.

The Philae design was actually developed with a different comet in mind, 46P/Wirtanen, which is smaller (~.5 to 1 mile) than 67P. So the speed at landing on the surface was nominally 0.5 m/sec, however, now with the larger 67P/Churyumov–Gerasimenko, the landing speed could be 2 or 3 times greater. In December 2002, there was an Ariane 5 launch failure, one month before launch of Rosetta and Philae to comet Wirtanen. Because of the necessary failure investigation, the launch was scrubbed and the only launch window to undertake the trajectory to Wirtanen was lost. The present comet 67P was then chosen. Mission engineers were aware of the mass difference and consequently had to modify Philae’s landing gear to withstand the greater forces upon landing on 67P/Churyumov–Gerasimenko.
Knowing the comet’s gravity, rotation axis and period are critical. Rosetta mission planners are working feverishly to determine the direction of gravity at the possible landing sites.
Philae has a simple cold gas propulsion system and its purpose is not to slow down the descent, as we often imagine for landers, but rather to push the lander onto the surface. Rosetta will accurately push off Philae at the right time, speed and direction to reach the landing spot.
So imagine if you will that it is the mid-1990s and you are designing a lander. It must accomplish the landing on its own, without help from Earth — except for what is built into the mechanisms and software. Philae’s software operates on a simple computer chip in the Command, Data and Management System (CDMS) jointly developed and tested in Hungary – Institute for Particle and Nuclear Physics, Wigner Research Centre for Physics, Hungarian Academy of Sciences and Germany – the Max Planck Institute. The Hungarian Institute also constructed the Power Subsystem (PSS) which is critical to Philae’s success. The PSS must produce and store power while enduring extremes in temperature and periods of no sunlight.
The computer processing power is about the same as that of a 1990s hand calculator, however, the chips used were radiation hardened to survive space conditions. Philae’s systems will be watching and making navigation corrections throughout the descent. Nothing fancy, this is a simple and straightforward execution with a modest control system on board. Nevertheless, it has everything necessary to accomplish the soft landing on a comet.
When studying the design, I first imagined that Philae would make a long descent and the comet would make a full rotation. But rather, Rosetta will be navigated to somewhere between 2 to 10 km above the comet surface then release Philae. Because of the comet’s odd shape, the probes could be 4 km above the surface at one time and then just 2 km at another, due to the rotation of the comet. The odd rotating shape means that the gravity field effecting the descent will be constantly changing. One might compare the effects of 67P’s gravity on Philae as similar to the motion of a well thrown knuckleball (e.g., Wakefield, Wilhelm). Catchers resort to using a larger catchers mitt and likewise, the landing zone (or ellipse) is 1 square kilometer, sizable considering 67P’s dimensions are 3.5 × 4 km (2.2 × 2.5 miles).

There is a also a modest tug of war going on between the mission planners and the researchers. For any mission that lands on a surface, for example, landers on Mars, there is the need to weigh safety against the return on investment. For the latter, the return is scientific return: measurements and observations of the most incredibly fascinating places you can imagine. For Philae, it gets one chance to land and one location to study, in contrast to the Mars Rovers which have traversed diverse terrain away from its landing site.
If anyone recalls the lander simulations that one could play on a computer or even a hand calculator, the simulations for Philae are a bit more challenging. Mission planners must have a good estimate of the comet’s gravity field, as strange as it is. They must know the rotation axis and rate of the comet accurately, and also know the relative position of Rosetta and Philae at the beginning of the descent.
The steps for the landing are: 1) release Philae towards the comet, 2) Descent: the comet is rotating and its gravity is weirdly pulling on the little probe during descent. Sounds like fun and one can be certain that mission planners are loving it. The descent that is undertaken is likely to be about 2 hours long. With a rotation period of 12.7 hours, the comet will rotate about 20%. But wait, there’s more. Rosetta is moving too and its orbital motion will be carried by Philae. This motion will offset the comet’s rotation to some degree.

3) Touchdown is when the CDMS will earn its badge of honor. Upon touchdown, the control system will fire the cold thrusters to push Philae snugly onto the surface. At the same time, the two harpoons will be fired to, hopefully, pierce and latch onto the cometary surface. To further prevent bounce or tipping, the dampener will absorb energy of the touchdown. Philae is likely to have some transverse velocity on touchdown and this will translate into a torque and a tipping action which the Harpoons and cold thrusters will reckon with.
So one can imagine that all the variables and possibilities have been considered by the mission planners. But not so fast. This is Humanity’s first visit to the surface of a comet. The name Rosetta and Philae were chosen because comets are like a Rosetta Stone that is revealing the secrets of our origins – the early formation of the planets. Carl Sagan explained that we are all made of star stuff but more recently, about 4.3 billion years ago, it was comet stuff that may have delivered the building blocks of life and possibly even the water that fills our oceans. We do not know for certain but studying, landing upon, touching and analyzing 67P/Churyumov–Gerasimenko will increase our understanding of the link between comets and the Earth.
Audacious landings seem to have become the ‘norm’.? With the MER crash-bag landings to Curiosity’s ‘hope on a rope’ landing to this ‘thrilling drilling’ scenario. I just hope that sucker sticks to it’s goal! I want to see violent sublimation from the surface as the comet begins to vent! (Hopefully some comfortable little distance away from Philae!)
Thanks. I share your enthusiasm for these landing missions. They are audacious. These comets are very cold and their materials vary from ice to rock. Most seem to be more rock than ice. It is not certain that the harpoons will penetrate the surface. The same goes for the ice screws. The worst case for both would be landing on powder with neither being able to latch on to anything. This would leave the slight gravity as the only hold down. Hopefully the landing rockets will serve their purpose well.
The imagery during descent and after landing … exciting!