China plans lunar far side landing with hardware similar to Chang’e-3 lander
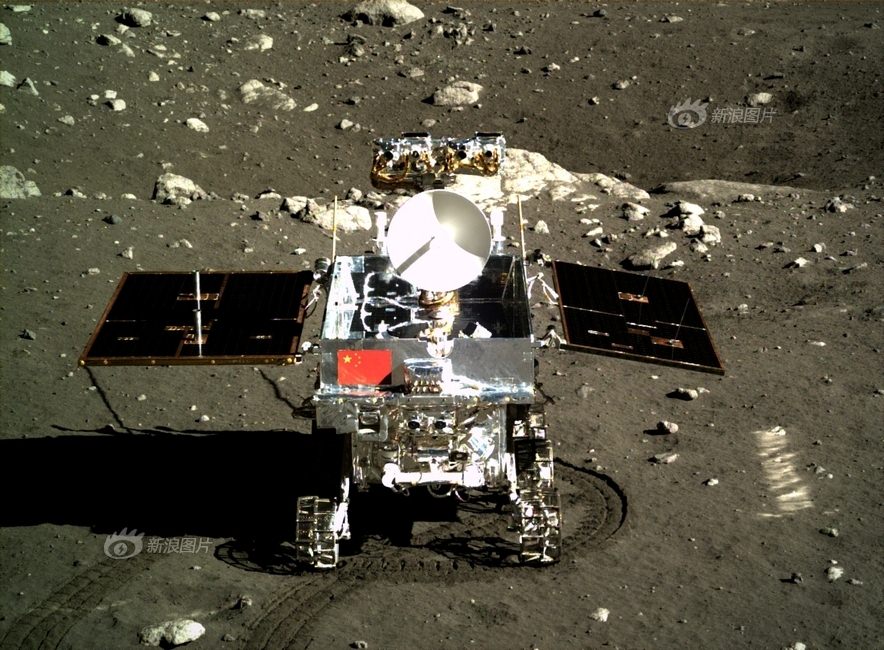
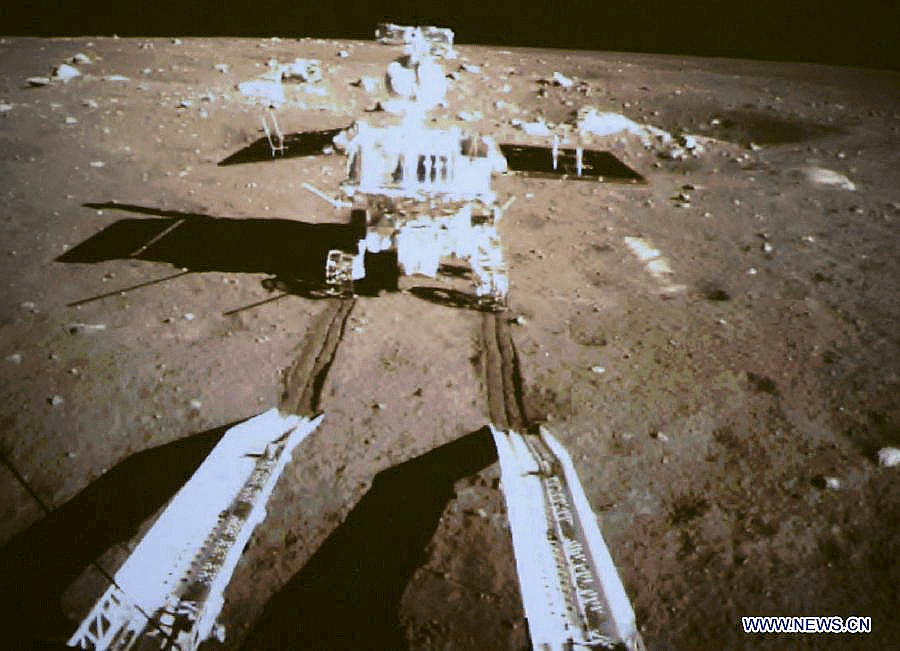
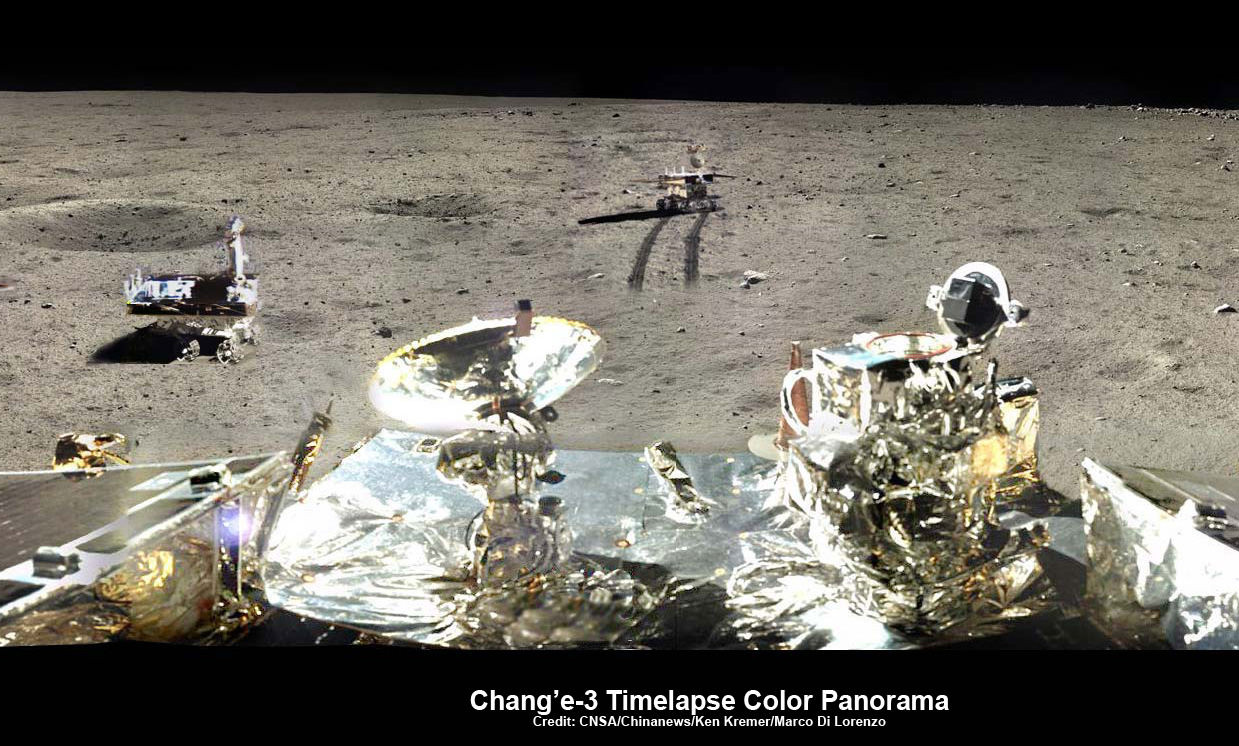
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo.
See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: [/caption]
China aims to land a science probe and research rover on the far side of the Moon by 2020, say Chinese officials.
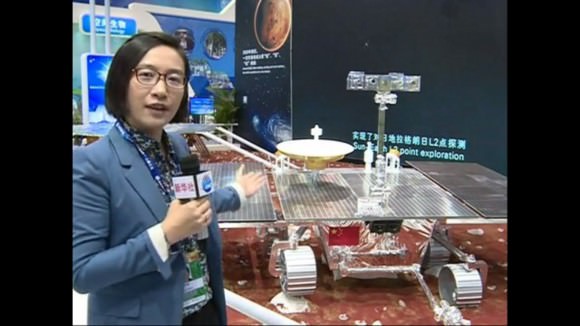
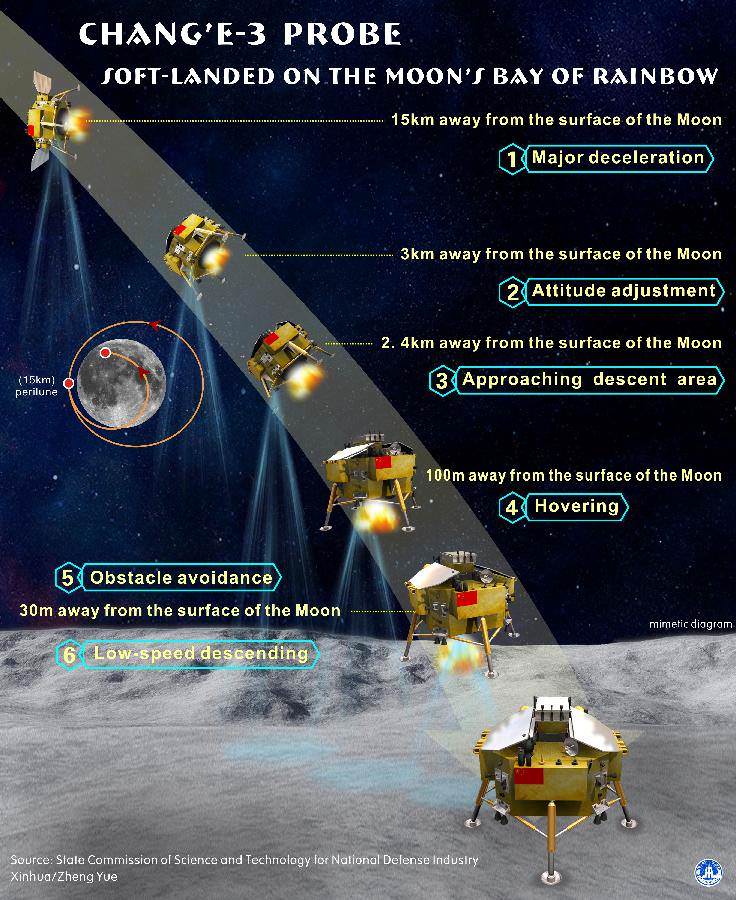
Chinese scientists plan to carry out the highly complex lunar landing mission using a near identical back up to the nations highly successful Chang’e-3 rover and lander – which touched down in December 2013.
If successful, China would become the first country to accomplish the history making task of a Lunar far side landing.
“The mission will be carried out by Chang’e-4, a backup probe for Chang’e-3, and is slated to be launched before 2020,” said Zou Yongliao from the moon exploration department under the Chinese Academy of Sciences, according to a recent report in China’s government owned Xinhua news agency.
Zou made the remarks at a deep-space exploration forum in China.
“China will be the first to complete the task if it is successful,” said Zou.
Chinese space scientists have been evaluating how best to utilize the Chang’e-4 hardware, built as a backup to Chang’e-3, ever since China’s successful inaugural soft landing on the Moon was accomplished by Chang’e-3 in December 2013 with the mothership lander and piggybacked Yutu lunar rover.
Plans to launch Chang’e-4 in 2016 were eventually abandoned in favor of further evaluation.
After completing an intense 12 month study ordered by China’s government, space officials confirmed that the lunar far side landing was the wisest use of the existing space hardware.
Chang’e-4 will be modified with a larger payload.
“Chang’e-4 is very similar to Chang’e-3 in structure but can handle more payload,” said Zou.
“It will be used to study the geological conditions of the dark side of the moon.”
The moon is tidally locked with the Earth so that only one side is ever visible. But that unique characteristic makes it highly attractive to scientists who have wanted to set up telescopes and other research experiments on the lunar far side for decades.
“The far side of the moon has a clean electromagnetic environment, which provides an ideal field for low frequency radio study. If we can can place a frequency spectrograph on the far side, we can fill a void,” Zou elaborated.
China will also have to launch another lunar orbiter in the next few years to enable the Chang’e-4 lander and rover to transmit signals and science data back to Chinese mission control on Earth.
In the meantime, China already announced its desire to forge ahead with an ambitious mission to return samples from the lunar surface later this decade.
The Chinese National Space Agency (CNSA) plans to launch the Chang’e-5 lunar sample return mission in 2017 as the third step in the nations far reaching lunar exploration program.
“Chang’e-5 will achieve several breakthroughs, including automatic sampling, ascending from the moon without a launch site and an unmanned docking 400,000 kilometers above the lunar surface,” said Li Chunlai, one of the main designers of the lunar probe ground application system, accoding to Xinhua.
The first step involved a pair of highly successful lunar orbiters named Chang’e-1 and Chang’e-2 which launched in 2007 and 2010.
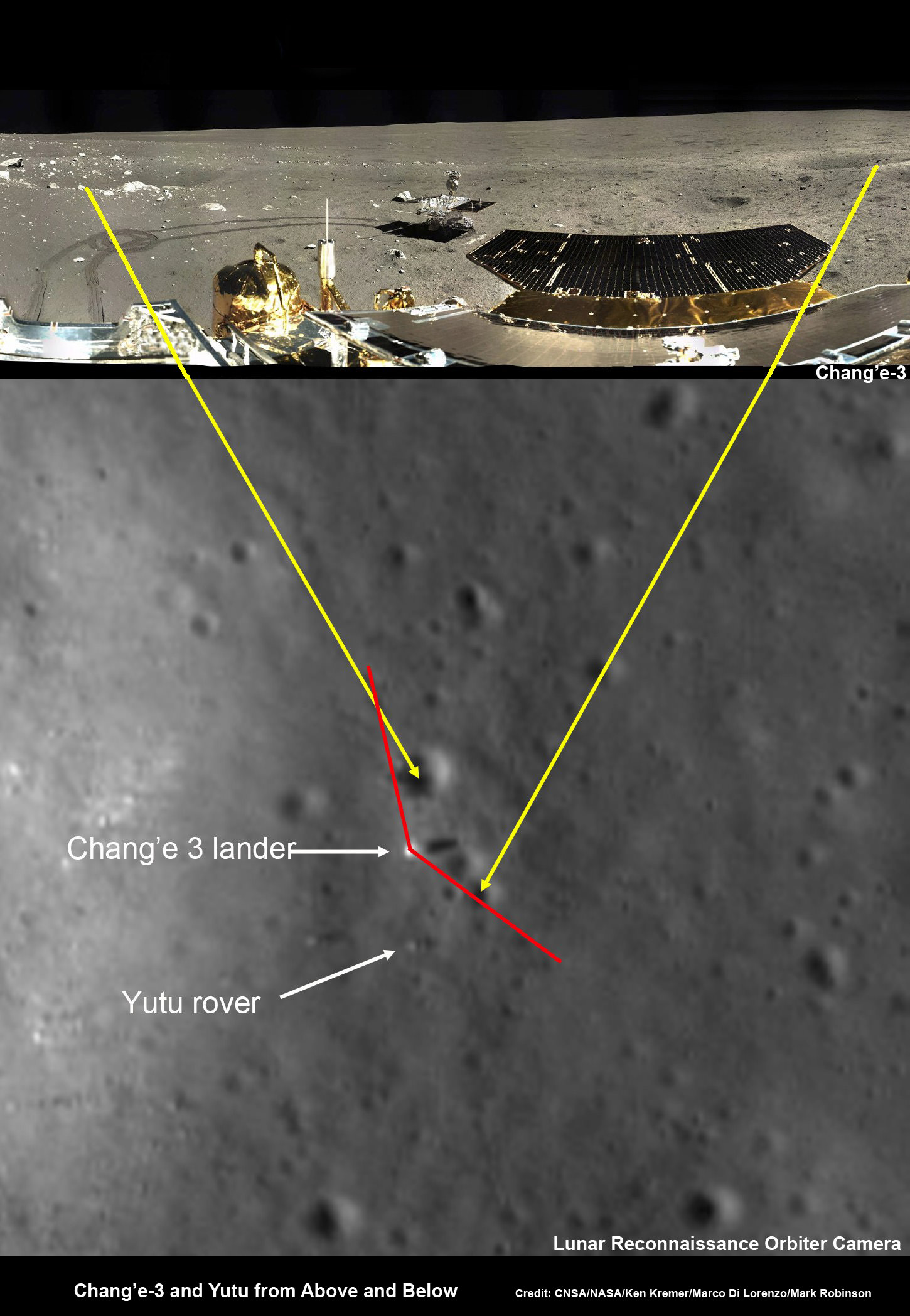
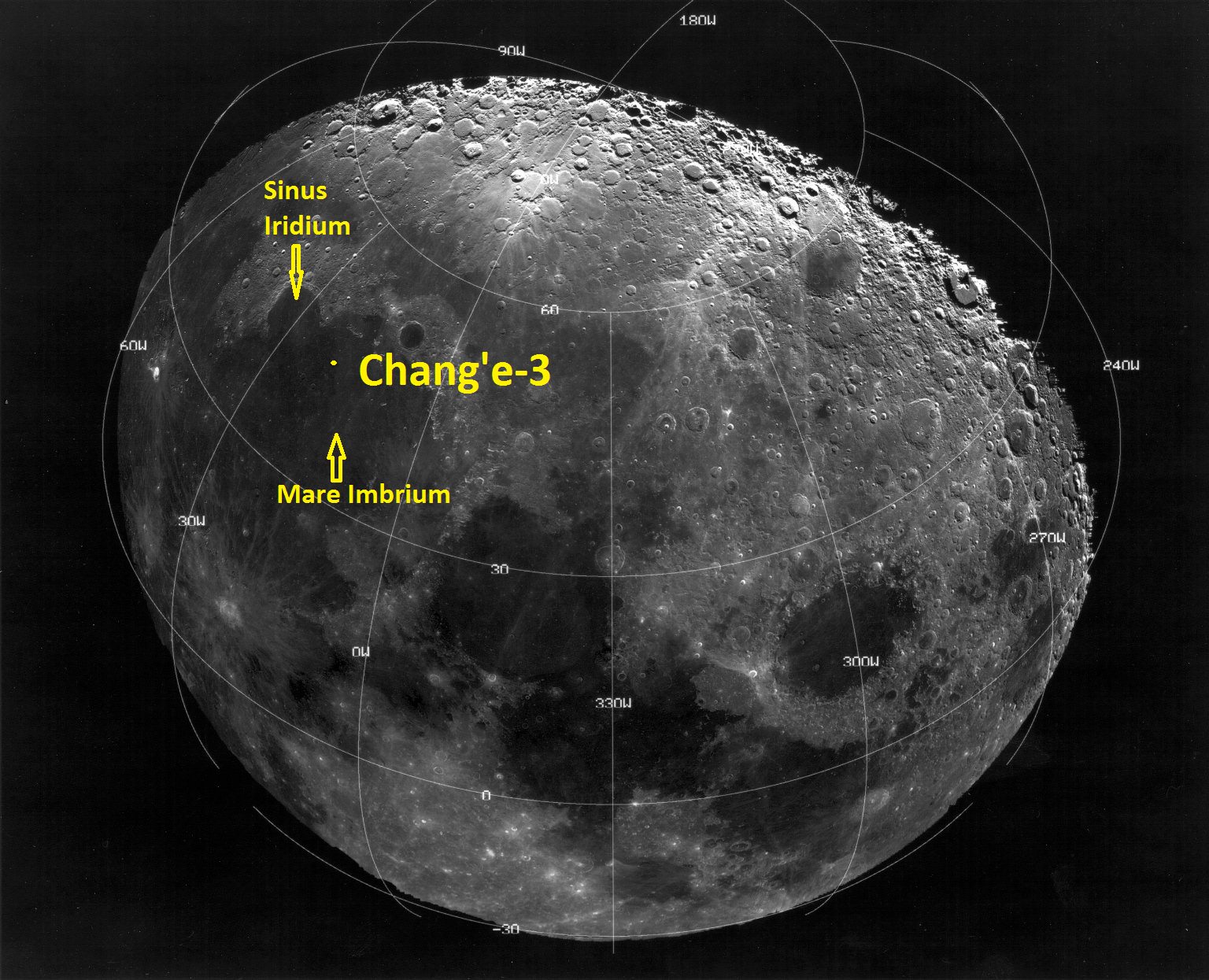
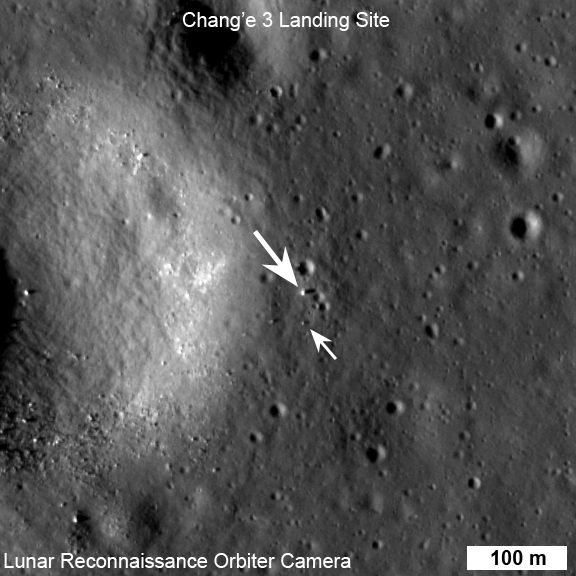
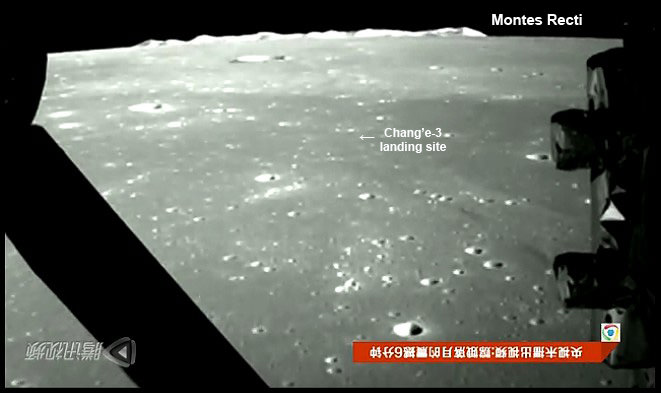
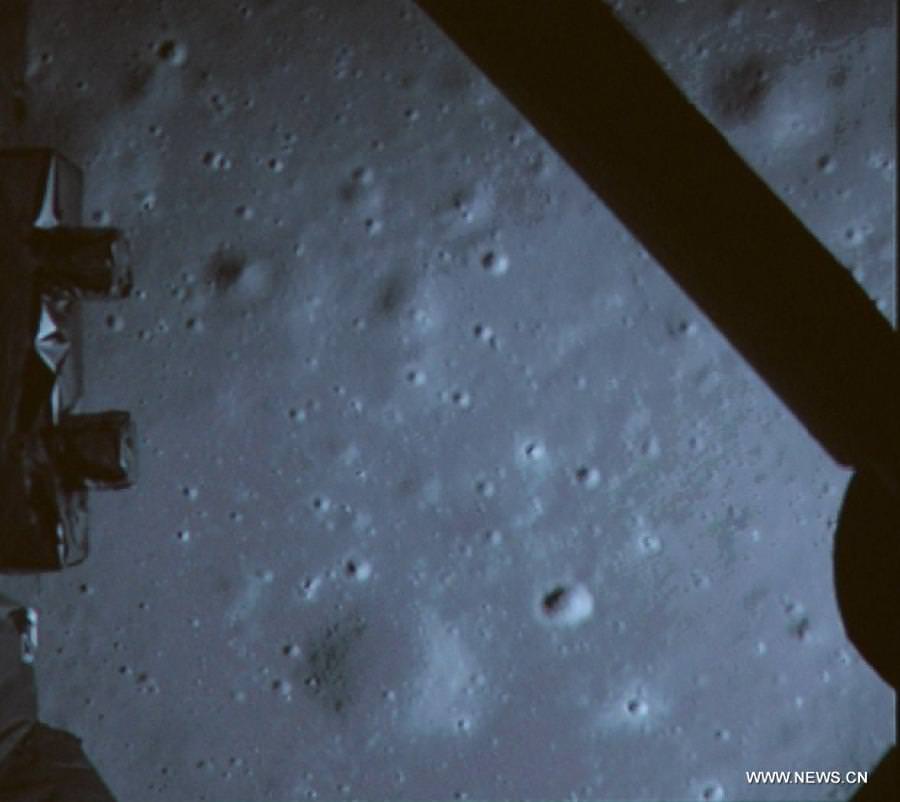
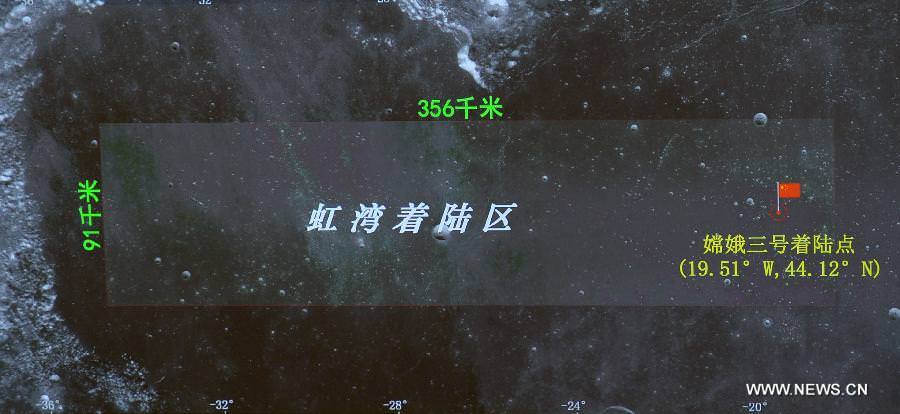
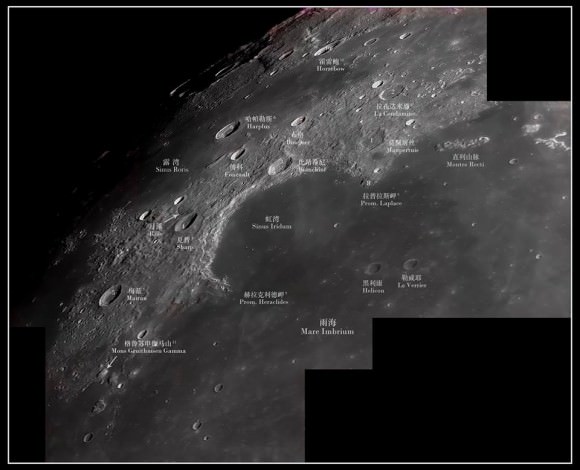
The second step involved the hugely successful Chang’e-3 mothership lander and piggybacked Yutu moon rover which safely touched down on the Moon at Mare Imbrium (Sea of Rains) on Dec. 14, 2013 – marking China’s first successful spacecraft landing on an extraterrestrial body in history, and chronicled extensively in my reporting here at Universe Today.

See above and herein our time-lapse photo mosaics showing China’s Yutu rover dramatically trundling across the Moon’s stark gray terrain in the first weeks after she rolled all six wheels onto the desolate lunar plains.
The complete time-lapse mosaic shows Yutu at three different positions trekking around the landing site, and gives a real sense of how it maneuvered around on its 1st Lunar Day.
The 360 degree panoramic mosaic was created by the imaging team of scientists Ken Kremer and Marco Di Lorenzo from images captured by the color camera aboard the Chang’e-3 lander and was featured at Astronomy Picture of the Day (APOD) on Feb. 3, 2014.
Chang’e-3 and Yutu landed on a thick deposit of volcanic material.

China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.