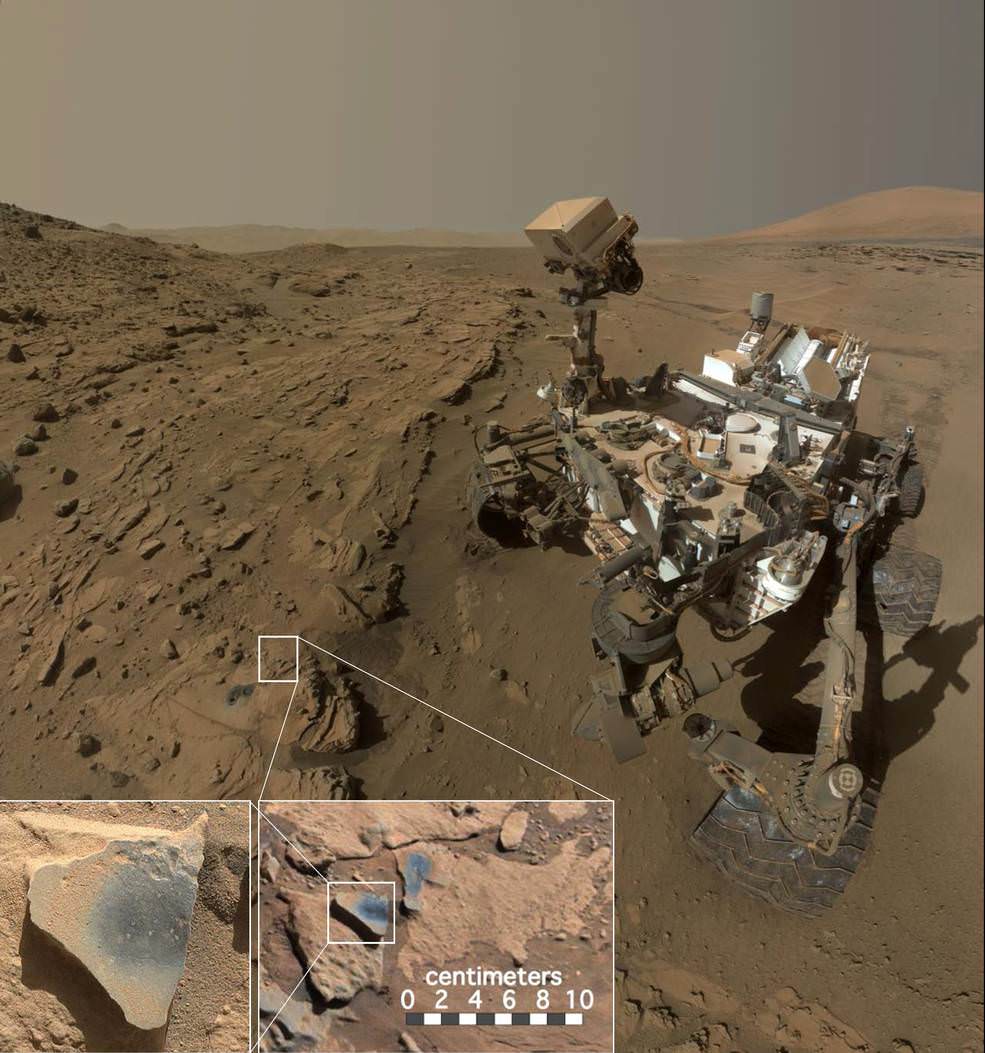
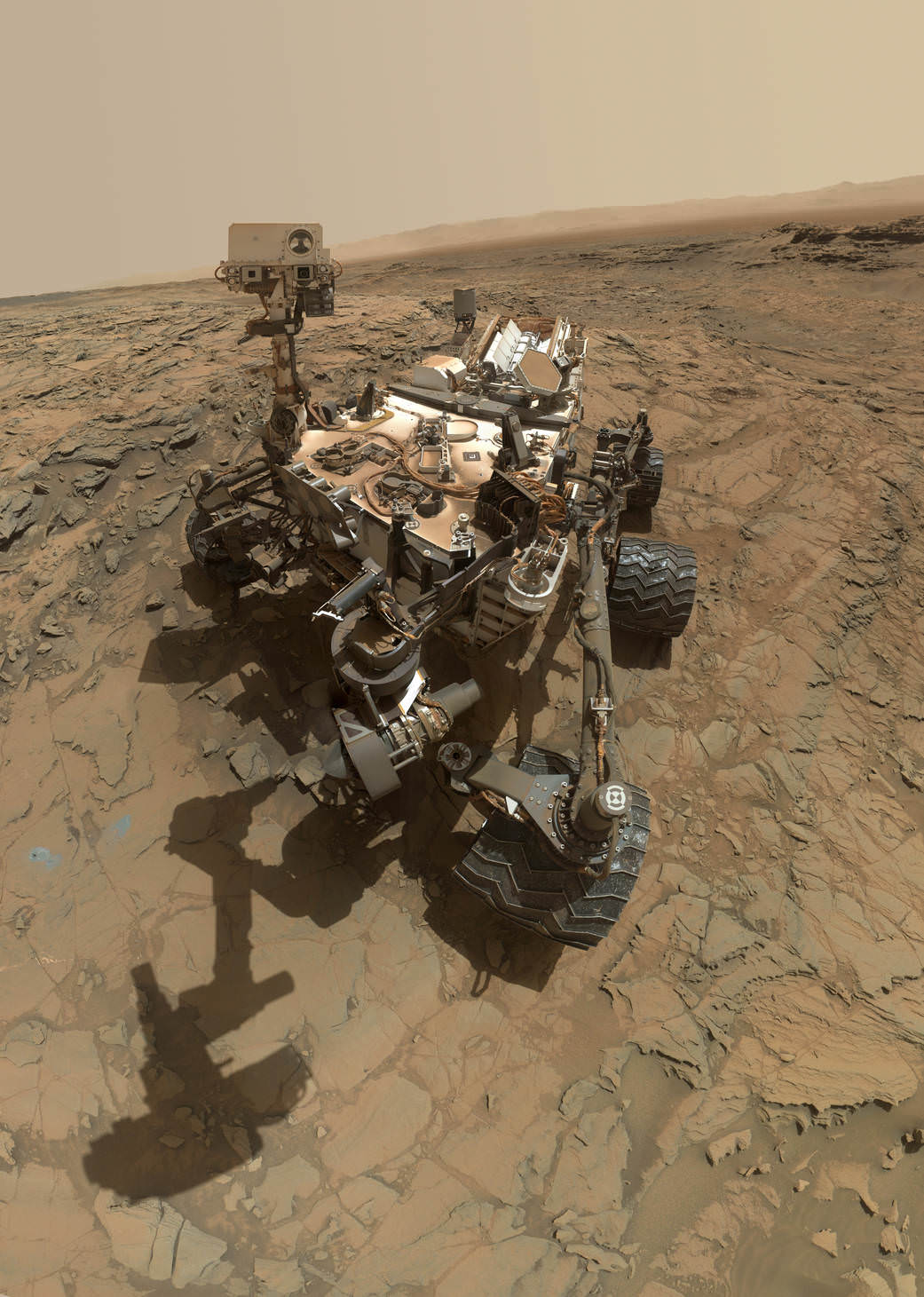
This scene shows NASA's Curiosity Mars rover at a location called "Windjana," where the rover found rocks containing manganese-oxide minerals, which require abundant water and strongly oxidizing conditions to form. Credits: NASA/JPL-Caltech/MSSS
This scene shows NASA’s Curiosity Mars rover at a location called “Windjana,” where the rover found rocks containing manganese-oxide minerals, which require abundant water and strongly oxidizing conditions to form. Credits: NASA/JPL-Caltech/MSSS
New chemical science findings from NASA’s Mars rover Curiosity indicate that ancient Mars likely had a higher abundance of molecular oxygen in its atmosphere compared to the present day and was thus more hospitable to life forms, if they ever existed.
Thus the Red Planet was much more Earth-like and potentially habitable billions of years ago compared to the cold, barren place we see today.
Manganese-oxide minerals require abundant water and strongly oxidizing conditions to form.
“Researchers found high levels of manganese oxides by using a laser-firing instrument on the rover. This hint of more oxygen in Mars’ early atmosphere adds to other Curiosity findings — such as evidence about ancient lakes — revealing how Earth-like our neighboring planet once was,” NASA reported.
The newly announced results stem from results obtained from the rovers mast mounted ChemCam or Chemistry and Camera laser firing instrument. ChemCam operates by firing laser pulses and then observes the spectrum of resulting flashes of plasma to assess targets’ chemical makeup.
“The only ways on Earth that we know how to make these manganese materials involve atmospheric oxygen or microbes,” said Nina Lanza, a planetary scientist at Los Alamos National Laboratory in New Mexico, in a statement.
“Now we’re seeing manganese oxides on Mars, and we’re wondering how the heck these could have formed?”
The discovery is being published in a new paper in the American Geophysical Union’s Geophysical Research Letters. Lanza is the lead author.
The manganese oxides were found by ChemCam in mineral veins investigated at “Windjana” and are part of geologic timeline being assembled from Curiosity’s research expedition across of the floor of the Gale Crater landing site.
Scientists have been able to link the new finding of a higher oxygen level to a time when groundwater was present inside Gale Crater.
“These high manganese materials can’t form without lots of liquid water and strongly oxidizing conditions,” says Lanza.
“Here on Earth, we had lots of water but no widespread deposits of manganese oxides until after the oxygen levels in our atmosphere rose.”
The high-manganese materials were found in mineral-filled cracks in sandstones in the “Kimberley” region of the crater.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo. Featured on APOD – Astronomy Picture of the Day on May 7, 2014
High concentrations of manganese oxide minerals in Earth’s ancient past correspond to a major shift in our atmosphere’s composition from low to high oxygen atmospheric concentrations. Thus its reasonable to suggest the same thing happened on ancient Mars.
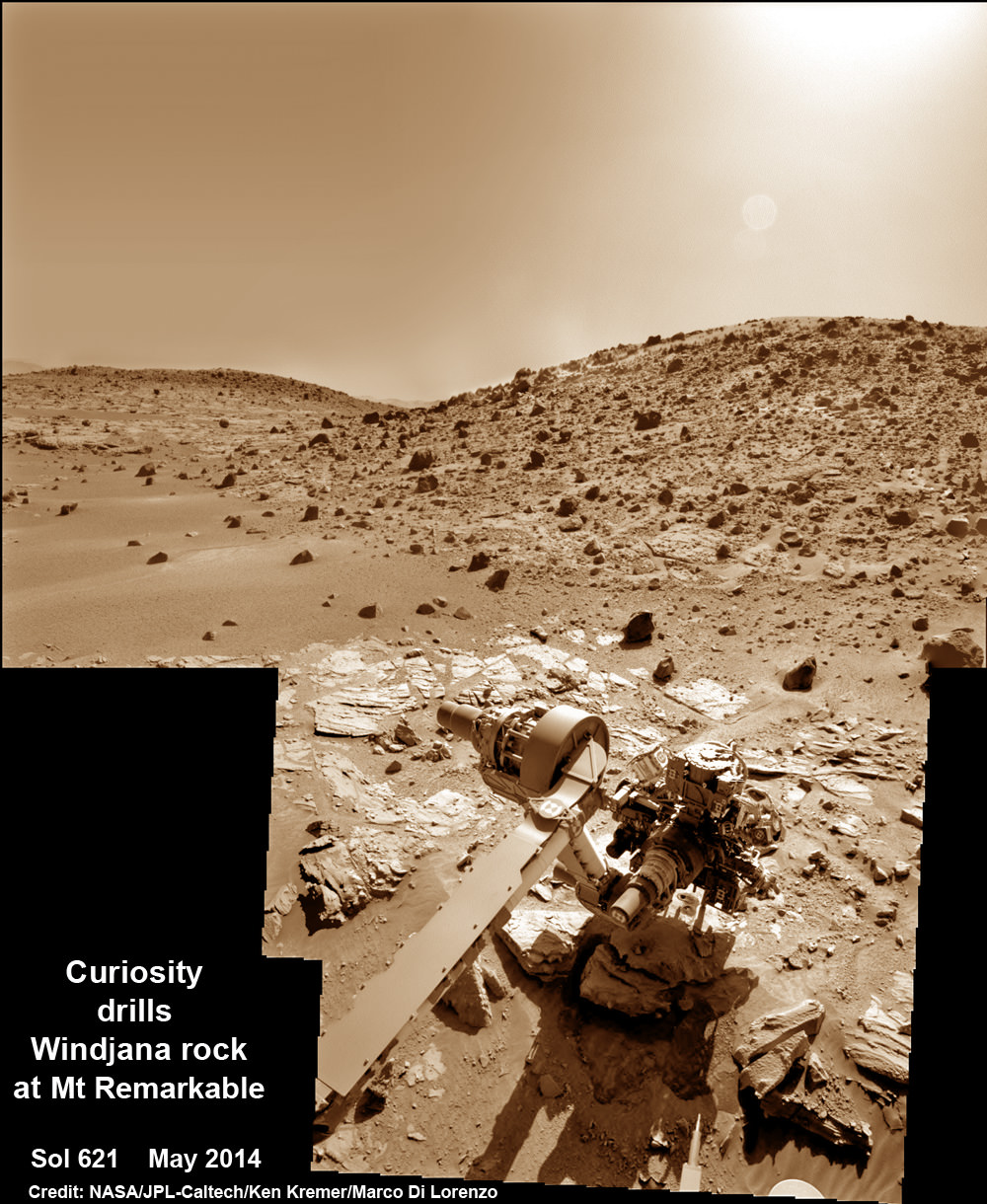
As part of the investigation, Curiosity also conducted a drill campaign at Windjana, her 3rd of the mission.
Composite photo mosaic shows deployment of NASA Curiosity rovers robotic arm and two holes after drilling into ‘Windjana’ sandstone rock on May 5, 2014, Sol 621, at Mount Remarkable as missions third drill target for sample analysis by rover’s chemistry labs. The navcam raw images were stitched together from several Martian days up to Sol 621, May 5, 2014 and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
How much manganese oxide was detected and what is the meaning?
“The Curiosity rover observed high-Mn abundances (>25 wt% MnO) in fracture-filling materials that crosscut sandstones in the Kimberley region of Gale crater, Mars,” according to the AGU paper.
“On Earth, environments that concentrate Mn and deposit Mn minerals require water and highly oxidizing conditions, hence these findings suggest that similar processes occurred on Mars.”
“Based on the strong association between Mn-oxide deposition and evolving atmospheric dioxygen levels on Earth, the presence of these Mn-phases on Mars suggests that there was more abundant molecular oxygen within the atmosphere and some groundwaters of ancient Mars than in the present day.”
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
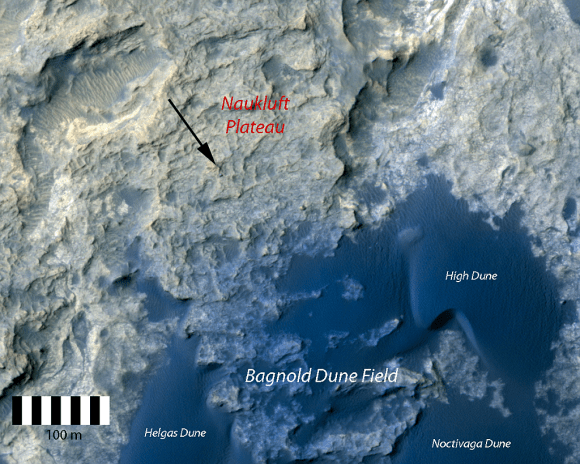
MSL Curiosity on the Naukluft Plateau on the Martian surface. This image was captured by HiRise on the Mars Reconnaissance Orbiter. Image: NASA/JPL/University of Arizona
Viewing orbital images of the rovers as they go about their business on the surface of Mars is pretty cool. Besides being of great interest to anyone keen on space in general, they have scientific value as well. New images from the High Resolution Imaging Science Equipment (HiRise) camera aboard the Mars Reconnaissance Orbiter (MRO) help scientists in a number of ways.
Recent images from HiRise show the Mars Science Laboratory (MSL) Curiosity on a feature called the Naukluft Plateau. The Plateau is named after a mountain range in Namibia, and is the site of Curiosity’s 10th and 11th drill targets.
Orbital imagery of the rovers is used to track the activity of sand dunes in the areas the rovers are working in. In this case, the dune field is called the Bagnold Dunes. HiRise imagery allows a detailed look at how dunes change over time, and how any tracks left by the rover are filled in with sand over time. Knowledge of this type of activity is a piece of the puzzle in understanding the Martian surface.
Curiosity on the Naukluft Plateau as captured by HiRise. Image: NASA/JPL/University of Arizona
But the ability to take such detailed images of the Martian surface has other benefits, as well. Especially as we get nearer to a human presence on Mars.
Orbital imaging is turning exploration on its ear. Throughout human history, exploration required explorers travelling by land and sea to reconnoiter an area, and to draw maps and charts later. We literally had no idea what was around the corner, over the mountain, or across the sea until someone went there. There was no way to choose a location for a settlement until we had walked the ground.
From the serious (SpaceX, NASA) to the fanciful (MarsOne), a human mission to Mars, and an eventual established presence on Mars, is a coming fact. The how and the where are all connected in this venture, and orbital images will be a huge part of choosing where.
Tracking the changes in dunes over time will help inform the choice for human landing sites on Mars. The types and density of sand particles may be determined by monitoring rover tracks as they fill with sand. This may be invaluable information when it comes to designing the types of facilities used on Mars. Critical infrastructure in the form of greenhouses or solar arrays will need to be placed very carefully.
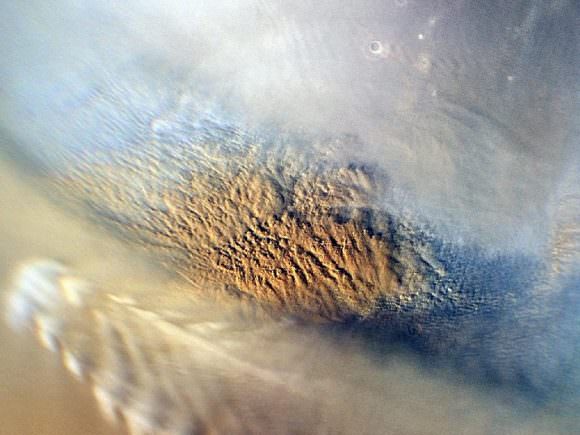
Sci-Fi writers have exaggerated the strength of sand storms on Mars to great effect, but they are real. We know from orbital monitoring, and from rovers, that Martian sandstorms can be very powerful phenomena. Of course, a 100 km/h wind on Earth is much more dangerous than on Mars because of the density of the atmosphere. Martian air is 1% the density of Earth’s, so on Mars the 100 km/h wind wouldn’t do much.
But it can pick up dust, and that dust can foul important equipment. With all this in mind, we can see how these orbital images give us an important understanding of how sand behaves on Mars.
This Martian sandstorm was captured by the MRO’s Mars Color Imager instrument. Scientists were monitoring such storms prior to Curiosity’s arrival on Mars. Image: NASA/JPL-Caltech/MSSS
There’s an unpredictability factor to all this too. We can’t always know in advance how important or valuable orbital imagery will be in the future. That’s part of doing science.
But back to the cool factor.
For the rest of us, who aren’t scientists, it’s just plain cool to be able to watch the rovers from above.
And, look at all the Martian eye candy!
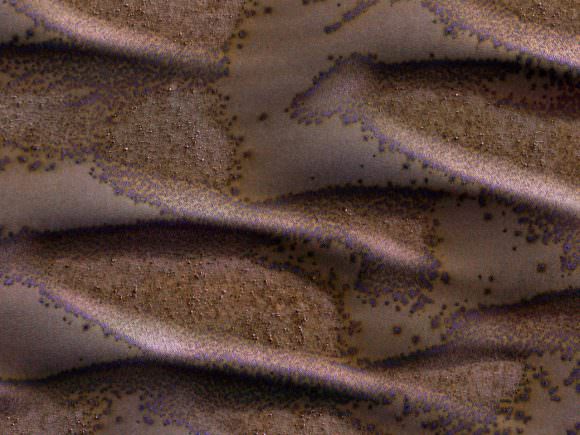
These sand dunes in the southern hemisphere of Mars are just starting their seasonal defrost of carbon dioxide. Image: NASA/JPL/University of Arizona
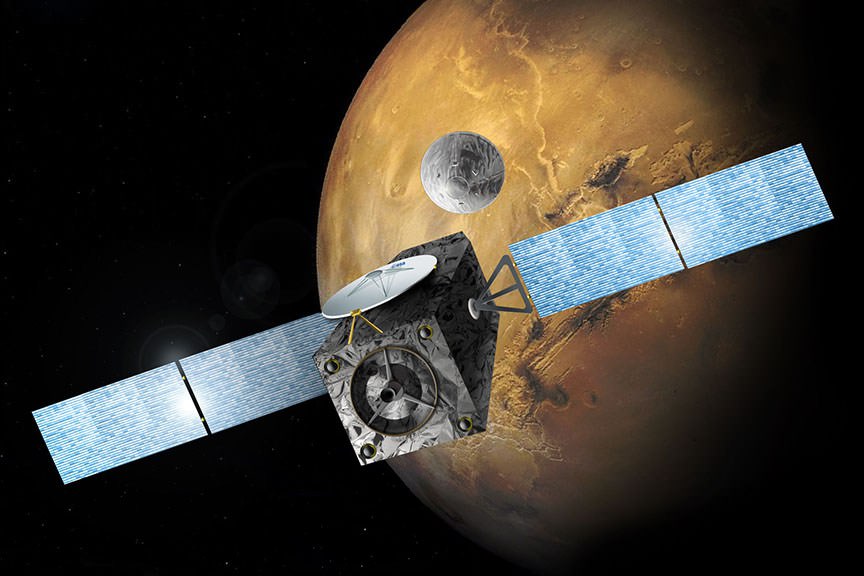
ESA Exomars rover launch has been rescheduled to launch two years later in 2020. Credit:ESA
ESA Exomars rover launch has been rescheduled to launch two years later in 2020. Credit:ESA
Liftoff of the ExoMars 2018 rover mission currently under development jointly by Europe and Russia has just been postponed for two years to 2020, according to an announcement today, May 2, from the European Space Agency (ESA) and the Russian space agency Roscosmos.
The delay was forced by a variety of technical and funding issues that ate up the schedule margin to enable a successful outcome for what will be Europe’s first Mars rover. The goal is to search for signs of life.
“Taking into account the delays in European and Russian industrial activities and deliveries of the scientific payload, a launch in 2020 would be the best solution,” ESA explained in a statement today.
The ambitious ExoMars rover is the second of two joint Euro-Russian missions to explore the Red Planet. It is equipped with an ESA deep driller and a NASA instrument to search for preserved organic molecules.
The first mission known as ExoMars 2016 was successfully launched last month from the Baikonur Cosmodrome in Kazakhstan atop a Russian Proton-M rocket on March 14.
The renamed ExoMars 2020 mission involves a European-led rover and a Russian-led surface platform and is also slated to blastoff on an Russian Proton rocket.
Roscosmos and ESA jointly decided to move the launch to the next available Mars launch window in July 2020. The costs associated with the delay are not known.
ExoMars 2016 lifted off on a Proton-M rocket from Baikonur, Kazakhstan at 09:31 GMT on 14 March 2016. Copyright ESA–Stephane Corvaja, 2016
The delay means that the Euro-Russian rover mission will launch the same year as NASA’s 2020 rover.
The rover is being built by prime contractor Airbus Defense and Space in Stevenage, England.
The descent module and surface science package are provided by Roscosmos with some contributions by ESA.
Recognizing the potential for a delay, ESA and Roscosmos set up a tiger team in late 2015 to assess the best options.
“Russian and European experts made their best efforts to meet the 2018 launch schedule for the mission, and in late 2015, a dedicated ESA-Roscosmos Tiger Team, also including Russian and European industries, initiated an analysis of all possible solutions to recover schedule delays and accommodate schedule contingencies,” said ESA in the statement.
The tiger team reported their results to ESA Director General Johann-Dietrich Woerner and Roscosmos Director General Igor Komarov.
Woerner and Komarov then “jointly decided to move the launch to the next available Mars launch window in July 2020, and tasked their project teams to develop, in cooperation with the industrial contactors, a new baseline schedule aiming towards a 2020 launch. Additional measures will also be taken to maintain close control over the activities on both sides up to launch.”
The ExoMars 2016 interplanetary mission is comprised of the Trace Gas Orbiter (TGO) and the Schiaparelli lander. The spacecraft are due to arrive at Mars in October 2016.
The ExoMars craft releases the Schiaparelli lander in October in this artist’s view. Credit: ESA
The goal of TGO is to search for possible signatures of life in the form of trace amounts of atmospheric methane on the Red Planet.
The main purpose of Schiaparelli is to demonstrate key entry, descent, and landing technologies for the follow on 2nd ExoMars mission that will land the first European rover on the Red Planet.
The now planned 2020 ExoMars mission will deliver an advanced rover to the Red Planet’s surface. It is equipped with the first ever deep driller that can collect samples to depths of 2 meters (seven feet) where the environment is shielded from the harsh conditions on the surface – namely the constant bombardment of cosmic radiation and the presence of strong oxidants like perchlorates that can destroy organic molecules.
ExoMars was originally a joint NASA/ESA project.
But thanks to hefty cuts to NASA’s budget by Washington DC politicians, NASA was forced to terminate the agencies involvement after several years of extremely detailed work and withdraw from participation as a full partner in the exciting ExoMars missions.
NASA is still providing the critical MOMA science instrument that will search for organic molecules.
Thereafter Russia agreed to take NASA’s place and provide the much needed funding and rockets for the pair of launches in March 2016 and May 2018.
TGO will also help search for safe landing sites for the ExoMars 2020 lander and serve as the all important data communication relay station sending signals and science from the rover and surface science platform back to Earth.
ExoMars 2016 is Europe’s most advanced mission to Mars and joins Europe’s still operating Mars Express Orbiter (MEX), which arrived back in 2004, as well as a fleet of NASA and Indian probes.
The Trace Gas Orbiter (TGO) and Schiaparelli lander arrive at Mars on October 19, 2016.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
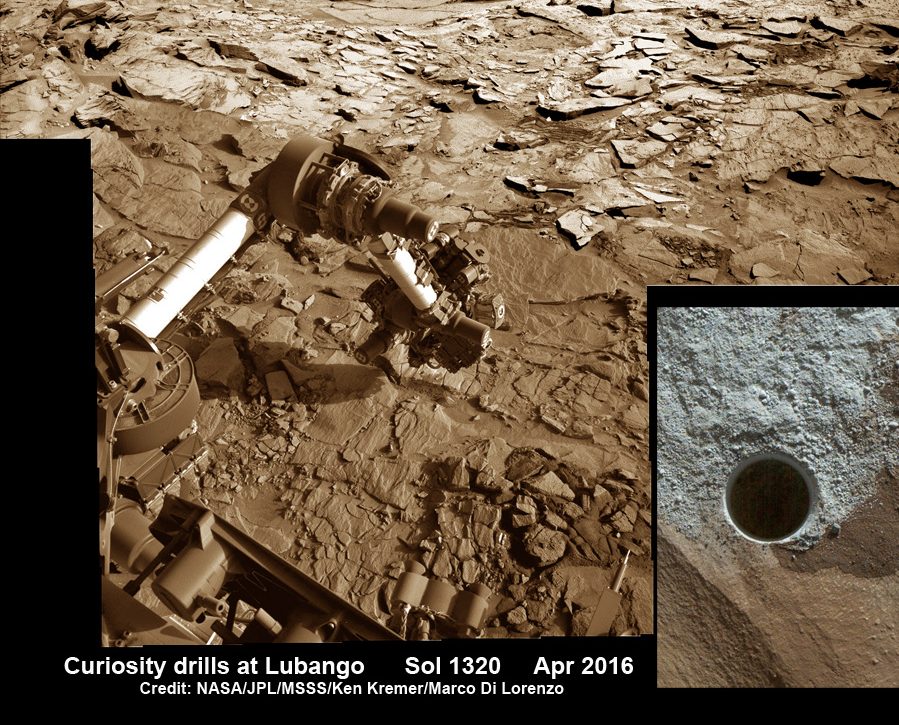
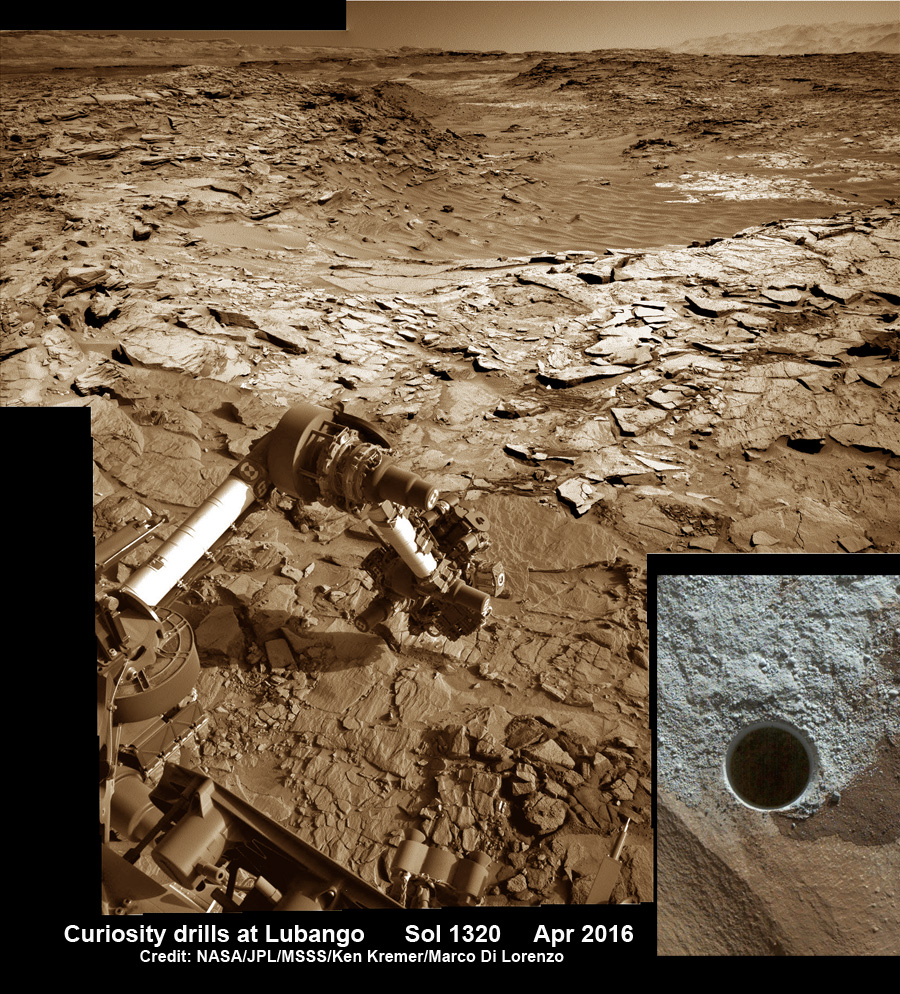
Curiosity rover reached out with robotic arm and drilled into ‘Lubango’ outcrop target on Sol 1320, Apr. 23, 2016, in this photo mosaic stitched from navcam camera raw images and colorized. Lubango is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. MAHLI camera inset image shows drill hole up close on Sol 1321. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity rover reached out with robotic arm and drilled into ‘Lubango’ outcrop target on Sol 1320, Apr. 23, 2016, in this photo mosaic stitched from navcam camera raw images and colorized. Lubango is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. MAHLI camera inset image shows drill hole up close on Sol 1321. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s CuriosityMars Science Laboratory (MSL) rover successfully bored a brand new hole in Mars at a tantalizing sandstone outcrop in the ‘Lubango’ fracture zone this past weekend on Sol 1320, Apr. 23, and is now carefully analyzing the shaken and sieved drill tailings for clues to Mars watery past atop the Naukluft Plateau.
“We have a new drill hole on Mars!” reported Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
“All of the activities planned for last weekend have completed successfully.”
“Lubango” counts as the 10th drilling campaign since the one ton rover safely touched down on the Red Planet some 44 months ago inside the targeted Gale Crater landing site, following the nailbiting and never before used ‘sky crane’ maneuver.
After transferring the cored sample to the CHIMRA instrument for sieving it, a portion of the less than 0.15 mm filtered material was successfully delivered this week to the CheMin miniaturized chemistry lab situated in the rovers belly.
CheMin is now analyzing the sample and will return mineralogical data back to scientists on earth for interpretation.
The science team selected Lubango as the robots 10th drill target after determining that it was altered sandstone bedrock and had an unusually high silica content based on analyses carried out using the mast mounted ChemCam laser instrument.
Indeed the rover had already driven away for further scouting and the team then decided to return to Lubango after examining the ChemCam results. They determined the ChemCam and other data observation were encouraging enough – regarding how best to sample both altered and unaltered Stimson bedrock – to change course and drive backwards.
Lubango sits along a fracture in an area that the team dubs the Stimson formation, which is located on the lower slopes of humongous Mount Sharp inside Gale Crater.
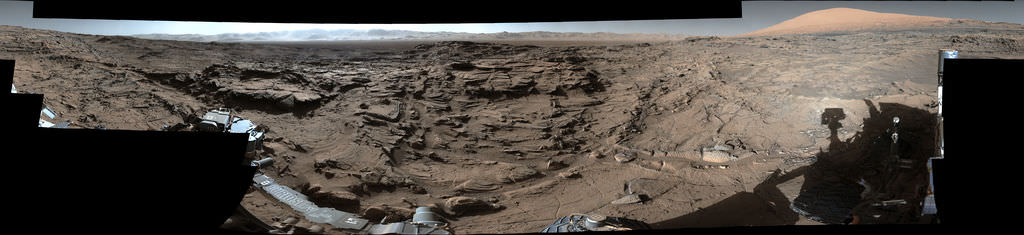
This mid-afternoon, 360-degree panorama was acquired by the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover on April 4, 2016, as part of long-term campaign to document the context and details of the geology and landforms along Curiosity’s traverse since landing in August 2012. Credit: NASA/JPL-Caltech/MSSS
Since early March, the rover has been traversing along a rugged region dubbed the Naukluft Plateau.
“The team decided to drill near this fracture to better understand both the altered and unaltered Stimson bedrock,” noted Herkenhoff.
See our photo mosaic above showing the geologically exciting terrain surrounding Curiosity with its outstretched 7-foot-long (2-meter-long) robotic arm after completing the Lubango drill campaign on Sol 1320. The mosaic was created by the imaging team of Ken Kremer and Marco Di Lorenzo.
Its again abundantly clear from the images that beneath the rusty veneer of the Red Planet lies a greyish interior preserving the secrets of Mars ancient climate history.
Curiosity rover views ‘Lubango’ drill target up close in this MAHLI camera image taken on Sol 1321, Apr. 24, 2016, processed to enhance details. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
The team then commanded Curiosity to dump the unsieved portion of the sample onto the ground and examine the leftover drill tailing residues with the Mastcam, Navcam, MAHLI multispectral characterization cameras and the APXS spectrometer. ChemCam is also being used to fire laser shots in the wall of the drill hole to make additional chemical measurements.
To complement the data from Lubango, scientists are now looking around the area for a suitable target of unaltered Stimson bedrock as the 11th drill target.
“The color information provided by Mastcam is really helpful in distinguishing altered versus unaltered bedrock,” explained MSL science team member Lauren Edgar, Research Geologist at the USGS Astrogeology Science Center, in a mission update.
The ChemCam laser has already shot at the spot dubbed “Oshikati,” a potential target for the next drilling campaign.
“On Sunday we will drive to our next drilling location, which is on a nearby patch of normal-looking Stimson sandstone,” wrote Ryan Anderson, planetary scientist at the USGS Astrogeology Science Center and a member of the ChemCam team on MSL in today’s (Apr. 28) mission update.
As time permits, the Navcam imager is also being used to search for dust devils.
As I reported here, Opportunity recently detected a beautiful looking dust devil on the floor of Endeavour crater on April 1. Dust devil detections by the NASA rovers are relatively rare.
Curiosity has been driving to the edge of the Naukluft Plateau to reach the interesting fracture zone seen in orbital data gathered from NASA’s Mars orbiter spacecraft.
Curiosity images Naukluft Plateau in this photo mosaic stitched from Mastcam camera raw images taken on Sol1296. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
The rover is almost finished crossing the Naukluft Plateau which is “the most rugged and difficult-to-navigate terrain encountered during the mission’s 44 months on Mars,” says NASA.
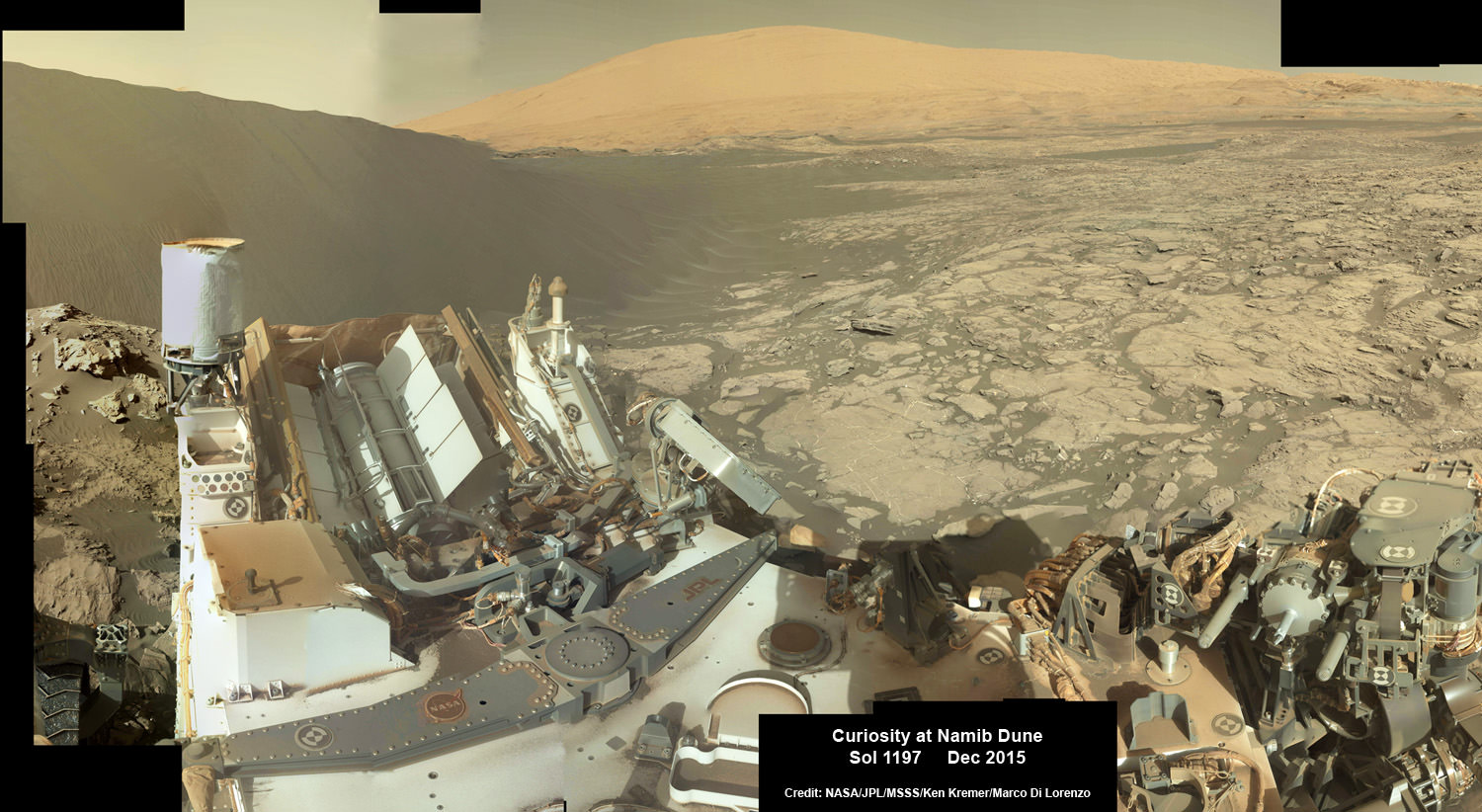
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 – backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of today, Sol 1325, April 28, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing, and taken over 320,100 amazing images.
Spectacular Mastcam camera view of Gale Crater rim from Curiosity on Sol 1302 enhanced to bring out detail. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
NASA’s Opportunity rover discovers a beautiful Martian dust devil moving across the floor of Endeavour crater as wheel tracks show robots path today exploring the steepest ever slopes of the 13 year long mission, in search of water altered minerals at Knudsen Ridge inside Marathon Valley on 1 April 2016. This navcam camera photo mosaic was assembled from raw images taken on Sol 4332 (1 April 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Opportunity rover discovers a beautiful Martian dust devil moving across the floor of Endeavour crater as wheel tracks show robots path today exploring the steepest ever slopes of the 13 year long mission, in search of water altered minerals at Knudsen Ridge inside Marathon Valley on 1 April 2016. This navcam camera photo mosaic was assembled from raw images taken on Sol 4332 (1 April 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
A “beautiful dust devil” was just discovered today, April 1, on the Red Planet by NASA’s long lived Opportunity rover as she is simultaneously exploring water altered rock outcrops at the steepest slopes ever targeted during her 13 year long expedition across the Martian surface. Opportunity is searching for minerals formed in ancient flows of water that will provide critical insight into establishing whether life ever existed on the fourth rock from the sun.
“Yes a beautiful dust devil on the floor of Endeavour Crater,” Ray Arvidson, Opportunity Deputy Principal Investigator of Washington University in St. Louis, confirmed to Universe Today. Spied from where “Opportunity is located on the southwest part of Knudsen Ridge” in Marathon Valley.
The new dust devil – a mini tornado like feature – is seen scooting across the ever fascinating Martian landscape in our new photo mosaic illustrating the steep walled terrain inside Marathon Valley and overlooking the crater floor as Opportunity makes wheel tracks at the current worksite on a crest at Knudsen Ridge. The colorized navcam camera mosaic combines raw images taken today on Sol 4332 (1 April 2016) and stitched by the imaging team of Ken Kremer and Marco Di Lorenzo.
“The dust devils have been kind to this rover,” Jim Green, Director of NASA Planetary Sciences at NASA HQ, said in an exclusive interview with Universe Today. They are associated with prior periods of solar array cleansing power boosts that contributed decisively to her longevity.
“Oppy’s best friend is on its way!”
Spotting dust devils has been relatively rare for Opportunity since landing on Mars on Jan. 24, 2004.
“There are 7 candidates, 6 of which are likely or certain,” Mark Lemmon, rover science team member from Texas A & M University, told Universe Today. “Most were seen in, on the rim of, or adjacent to Endeavour.”
Starting in late January, scientists commanded the golf cart sized Opportunity to drive up the steepest slopes ever attempted by any Mars rover in order to reach rock outcrops where she can conduct breakthrough science investigations on smectite (phyllosilicate) clay mineral bearing rocks yielding clues to Mars watery past.
“We are beginning an imaging and contact science campaign in an area where CRISM spectra show evidence for deep absorptions associated with Fe [Iron], Mg [Magnesium] smectites,” Arvidson explained.
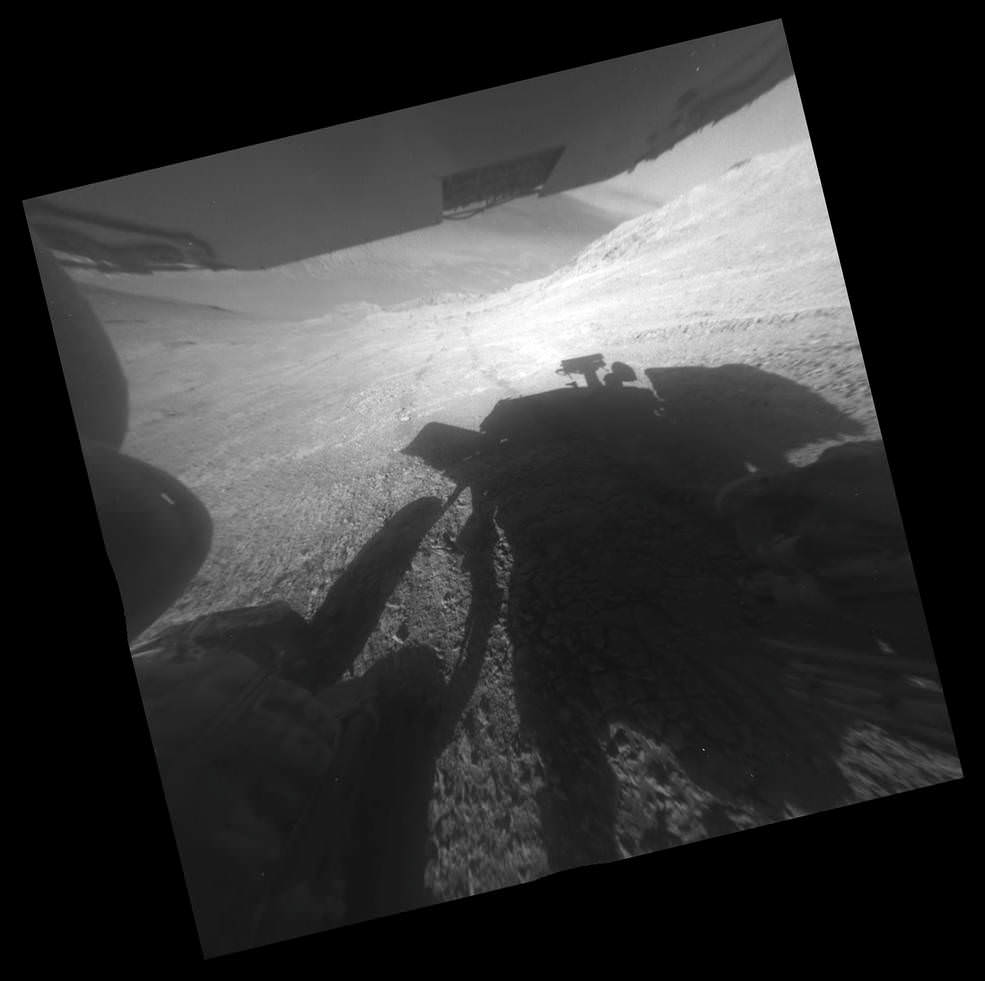
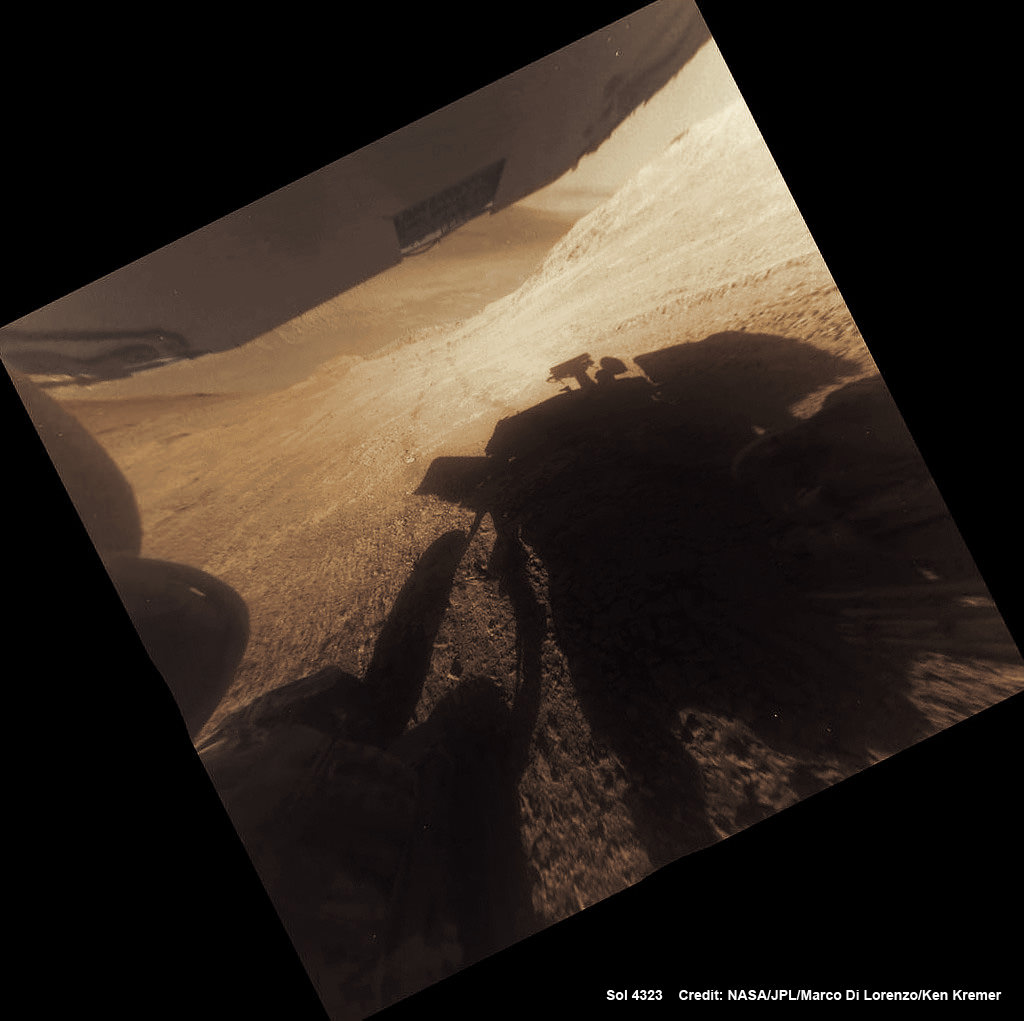
A shadow and tracks of NASA’s Mars rover Opportunity appear in this March 22, 2016, image, which has been rotated 13.5 degrees to adjust for the tilt of the rover. The hillside descends to the left into “Marathon Valley.” The floor of Endeavour Crater is seen beneath the underside of a solar panel. Credits: NASA/JPL-Caltech
This is especially exciting to researchers because the phyllosilicate clay mineral rocks formed under water wet, non-acidic conditions that are more conducive to the formation of Martian life forms – billions of years ago when the planet was far warmer and wetter.
“We have been in the smectite [phyllosilicate clay mineral] zone for months, ever since we entered Marathon Valley.”
The smectites were discovered via extensive, specially targeted Mars orbital measurements gathered by the CRISM (Compact Reconnaissance Imaging Spectrometer for Mars) spectrometer on NASA’s Mars Reconnaissance Orbiter (MRO) – accomplished earlier at the direction of Arvidson.
So the ancient, weathered slopes around Marathon Valley became a top priority science destination after they were found to hold a motherlode of ‘smectite’ clay minerals based on the CRISM data.
“Marathon Valley is unlike anything we have ever seen. Looks like a mining zone!”
At this moment, the rover is driving to an alternative rock outcrop located on the southwest area of the Knudsen Ridge hilltops after trying three times to get within reach of the clay minerals by extending her instrument laden robotic arm.
NASA’s Opportunity rover images current worksite at Knudsen Ridge on Sol 4228 where the robot is grinding into rock targets inside Marathon Valley during 12th Anniversary of touchdown on Mars in Jan. 2016. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Unfortunately, but not unexpectedly, the rover kept slipping on the steep walled slopes – tilted as much as 32 degrees – while repeatedly attempting close approaches to the intended target. Ultimately she came within 3 inches of the surface science target ‘Pvt. Joseph Whitehouse’ – named after a member of the Corps of Discovery.
In fact despite rotating her wheels enough to push uphill about 66 feet (20 meters) if there had been no slippage, engineers discerned from telemetry that slippage was so great that “the vehicle progressed only about 3.5 inches (9 centimeters). This was the third attempt to reach the target and came up a few inches short,” said NASA.
“The rover team reached a tough decision to skip that target and move on.”
So they backed Opportunity downhill about 27 feet (8.2 meters), then drove about 200 feet (about 60 meters) generally southwestward and uphill, toward the next target area.
NASA officials noted that “the previous record for the steepest slope ever driven by any Mars rover was accomplished while Opportunity was approaching “Burns Cliff” about nine months after the mission’s January 2004 landing on Mars.”
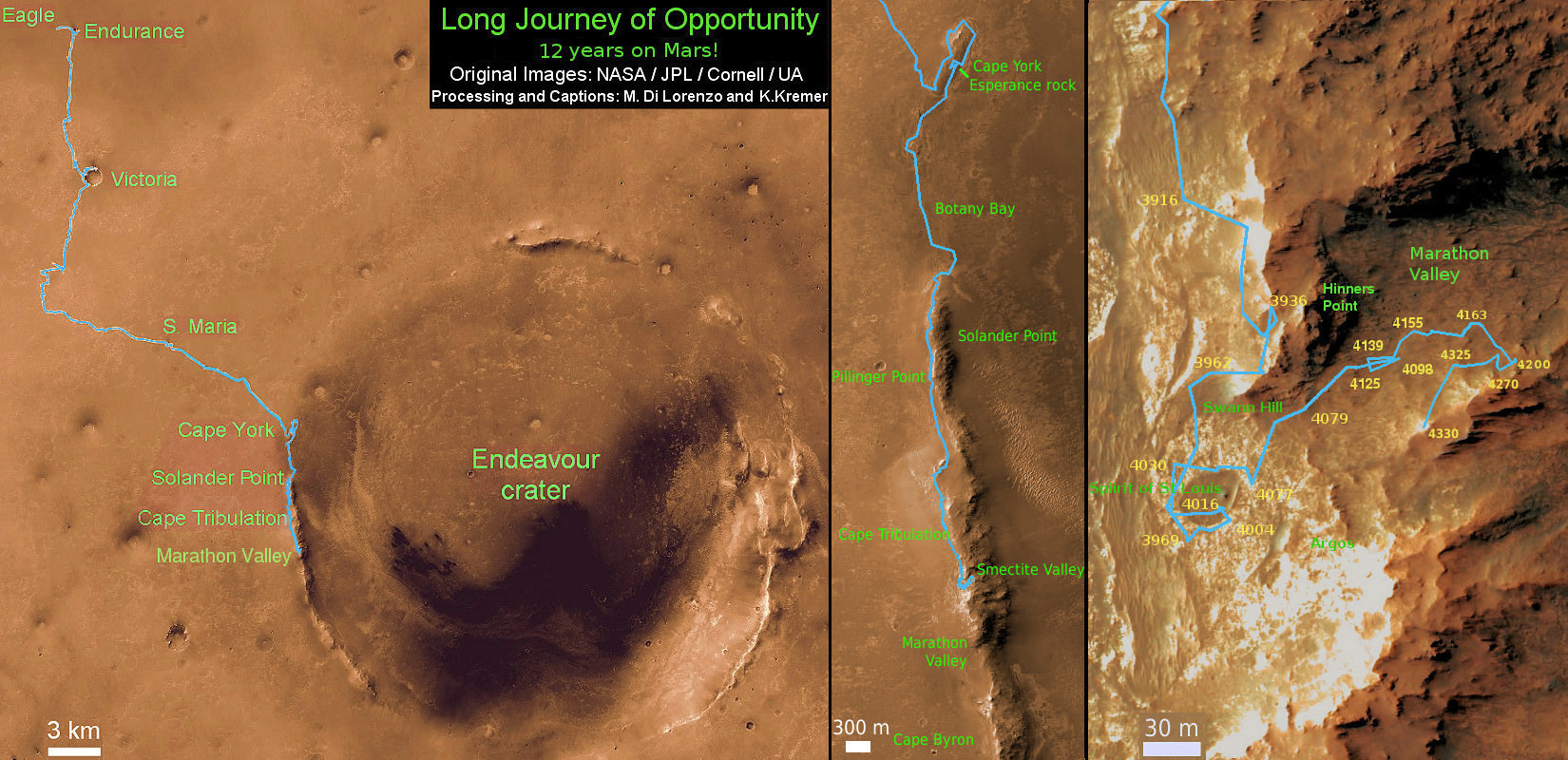
Marathon Valley measures about 300 yards or meters long. It cuts downhill through the west rim of Endeavour crater from west to east – the same direction in which Opportunity is currently driving downhill from a mountain summit area atop the crater rim. See our route map below showing the context of the rovers over dozen year long traverse spanning more than the 26 mile distance of a Marathon runners race.
Endeavour crater spans some 22 kilometers (14 miles) in diameter. Opportunity has been exploring Endeavour since arriving at the humongous crater in 2011.
NASA’s Opportunity rover peers outwards across to the vast expense of Endeavour Crater from current location descending along steep walled Marathon Valley in early November 2015. Marathon Valley holds significant deposits of water altered clay minerals holding clues to the planets watery past. Shadow of Pancam Mast assembly and robots deck visible at right. This navcam camera photo mosaic was assembled from images taken on Sol 4181 (Oct. 29, 2015) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Why are the dust devils a big deal?
Offering more than just a pretty view, the dust devils actually have been associated with springtime Martian winds that clear away the dust obscuring the robots life giving solar panels.
“Opportunity is largely in winter mode sitting on a hill side getting maximum power. But it is in a better power status than in many past winters,” Jim Green, Director of NASA Planetary Sciences at NASA HQ, told Universe Today exclusively.
“I think I know the reason. As one looks across the vistas of Mars in this mosaic Oppys best friend is on its way.”
“The dust devils have been kind to this rover. Even I have a smile on my face when I see what’s coming.”
12 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2016. This map shows the entire path the rover has driven during almost 12 years and more than a marathon runners distance on Mars for over 4332 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater and descending into Marathon Valley. Rover surpassed Marathon distance on Sol 3968 and marked 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and is currently searching for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
As of today, Sol 4332, Apr. 1, 2016, Opportunity has taken over 209,200 images and traversed over 26.53 miles (42.69 kilometers) – more than a marathon.
The power output from solar array energy production has climbed to 576 watt-hours, now just past the depths of southern hemisphere Martian winter.
Meanwhile Opportunity’s younger sister rover Curiosity traverses and drills into the basal layers at the base of Mount Sharp.
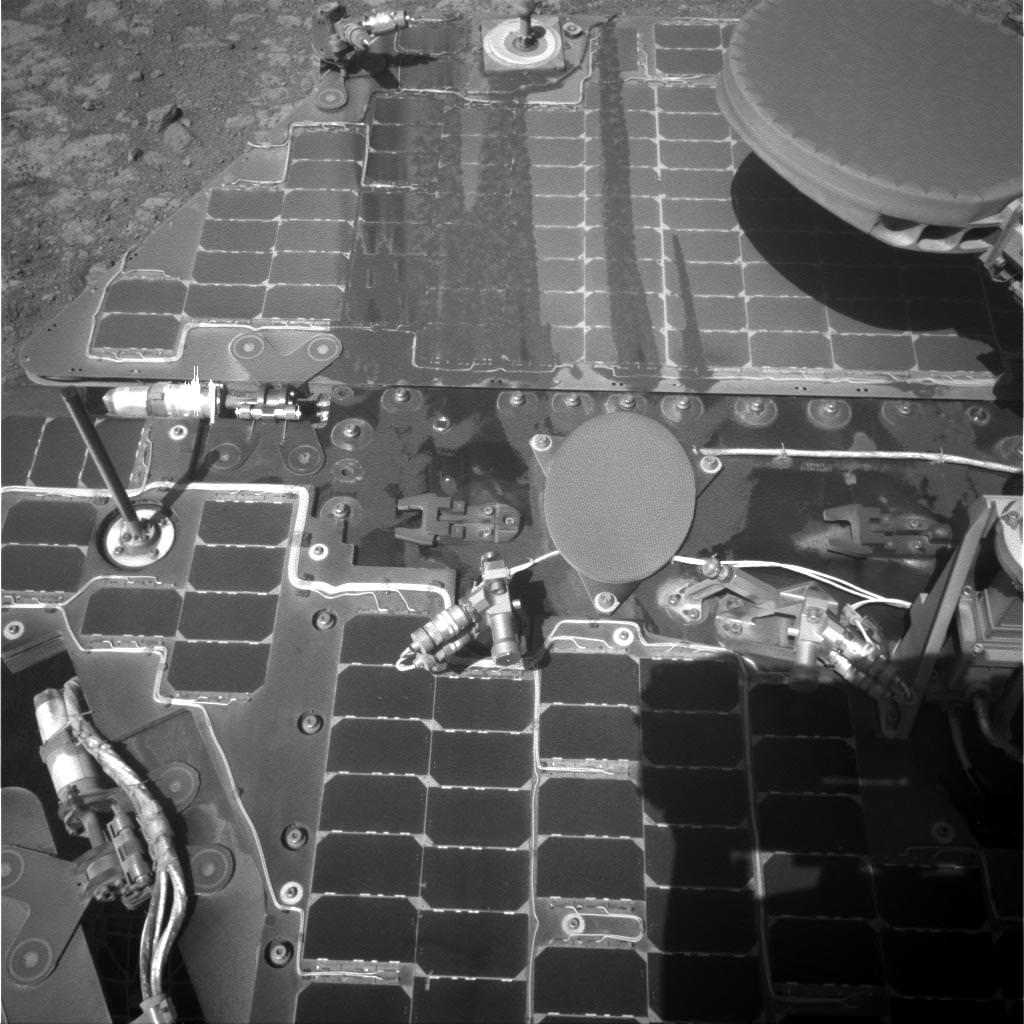
This March 21, 2016, image from the navigation camera on NASA’s Mars rover Opportunity shows streaks of dust or sand on the vehicle’s rear solar panel after a series of drives during which the rover was pointed steeply uphill. The tilt and jostling of the drives affected material on the rover deck. Credits: NASA/JPL-Caltech
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Learn more about NASA Mars rovers, Orion, SLS, ISS, Orbital ATK, ULA, SpaceX, Boeing, Space Taxis, NASA missions and more at Ken’s upcoming outreach events:
Apr 9/10: “NASA and the Road to Mars Human Spaceflight programs” and “Curiosity explores Mars” at NEAF (NorthEast Astronomy and Space Forum), 9 AM to 5 PM, Suffern, NY, Rockland Community College and Rockland Astronomy Club – http://rocklandastronomy.com/neaf.html
Apr 12: Hosting Dr. Jim Green, NASA, Director Planetary Science, for a Planetary sciences talk about “Ceres, Pluto and Planet X” at Princeton University; 7:30 PM, Amateur Astronomers Assoc of Princeton, Peyton Hall, Princeton, NJ – http://www.princetonastronomy.org/
Apr 17: “NASA and the Road to Mars Human Spaceflight programs”- 1:30 PM at Washington Crossing State Park, Nature Center, Titusville, NJ – http://www.state.nj.us/dep/parksandforests/parks/washcros.html
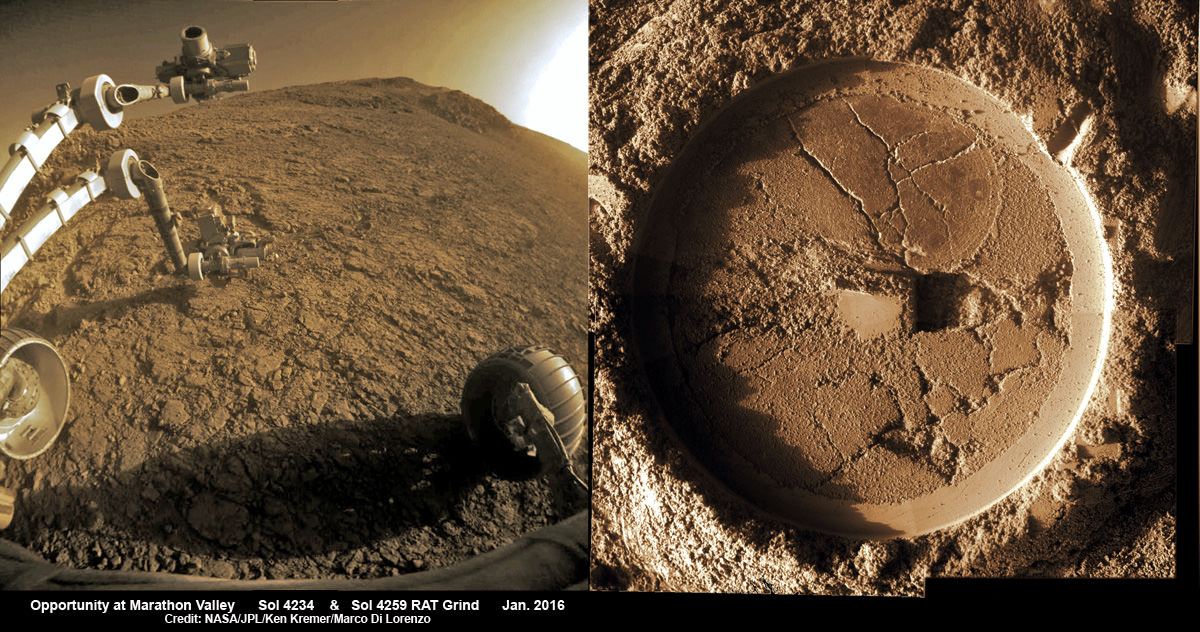
A shadow and tracks of NASA’s Mars rover Opportunity appear in this March 22, 2016, colorized hazcam camera image, which has been rotated 13.5 degrees to adjust for the tilt of the rover. The hillside descends to the left into “Marathon Valley.” The floor of Endeavour Crater is seen beneath the underside of a solar panel. Credits: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer/kenkremer.comComposite hazcam camera image (left) shows the robotic arm in motion as NASA’s Mars Exploration Rover Opportunity places the tool turret on the target named “Private John Potts” on Sol 4234 to brush away obscuring dust. Rover is actively working on the southern side of “Marathon Valley” which slices through western rim of Endeavour Crater. On Sol 4259 (Jan. 16, 2016), Opportunity completed grinds with the Rock Abrasion Tool (RAT) to exposure rock interior for elemental analysis, as seen in mosaic (right) of four up close images taken by Microscopic Imager (MI). Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 - backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Just in time for the holidays, NASA’sCuriosity rover is celebrating Christmas 2015 at a Red Planet Paradise – spectacular “Namib Dune.” And she marked the occasion by snapping her first ever color self-portrait with the mast mounted high resolution Mastcam 34 mm camera.
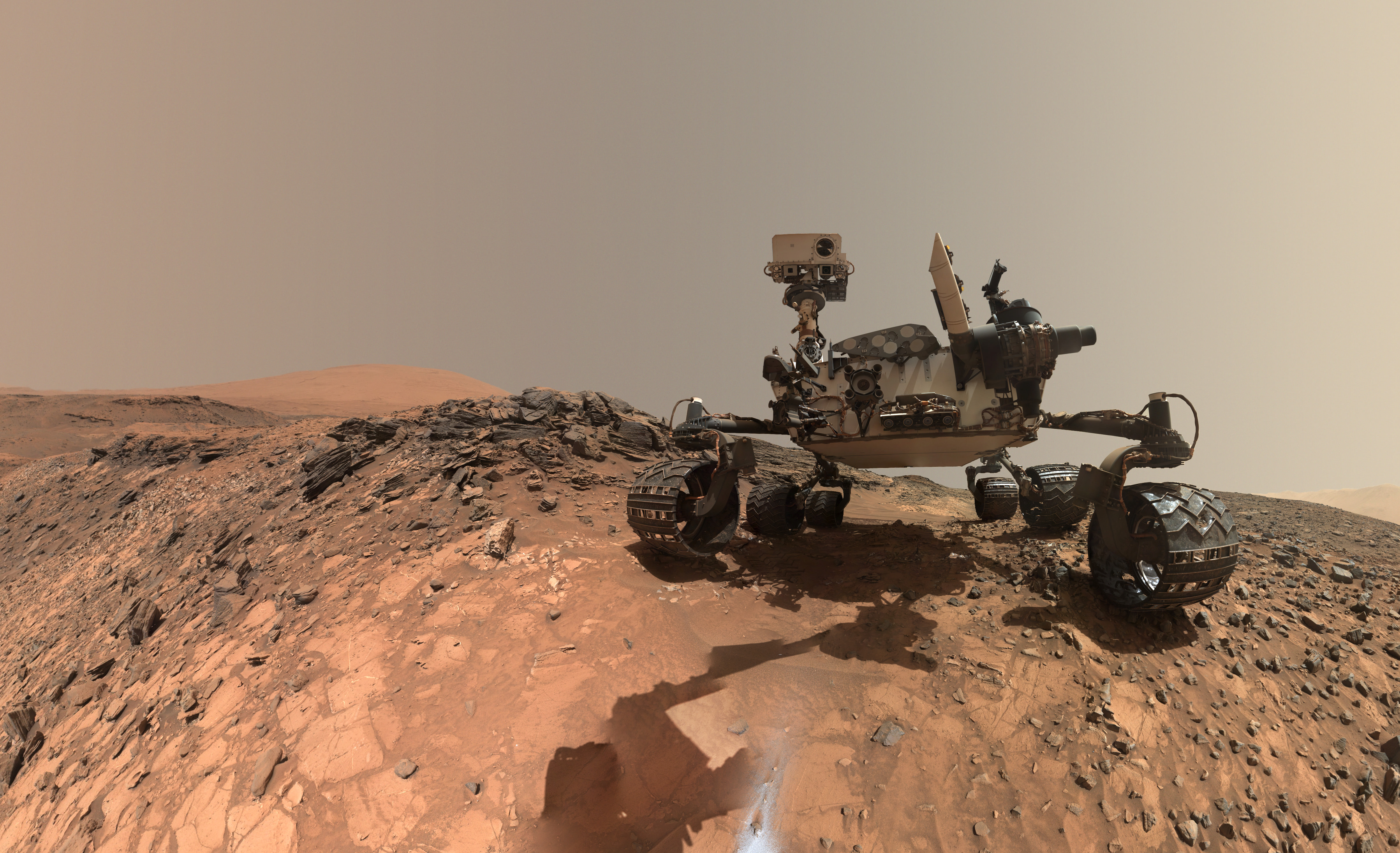
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
This self-portrait of NASA’s Curiosity Mars rover shows the vehicle at the “Big Sky” site, where its drill collected the mission’s fifth taste of Mount Sharp, at lower left corner. The scene combines images taken by the Mars Hand Lens Imager (MAHLI) camera on Sol 1126 (Oct. 6, 2015). Credit: NASA/JPL-Caltech/MSSS
See below navcam drilling photo mosaic at Big Sky[/caption]
NASA’s Curiosity rover has managed to snap another gorgeous selfie while she was hard at work diligently completing her newest Martian sample drilling campaign – at the ‘Big Sky’ site at the base of Mount Sharp, the humongous mountain dominating the center of the mission’s Gale Crater landing site – which the science team just confirmed was home to a life bolstering ancient lake based on earlier sample analyses.
And the team is already actively planning for the car sized robots next drill campaign in the next few sols, or Martian days!
Overall ‘Big Sky’ marks Curiosity’s fifth ‘taste’ of Mount Sharp – since arriving at the mountain base one year ago – and eighth drilling operation since the nail biting Martian touchdown in August 2012.
NASA’s newly published self-portrait was stitched from dozens of images taken at Big Sky last week on Oct. 6, 2015, or Sol 1126, by the high resolution Mars Hand Lens Imager (MAHLI) color camera at the end of the rover’s 7 foot long robotic arm. The view is centered toward the west-northwest.
At Big Sky, the Curiosity Mars Science Laboratory (MSL) bored into an area of cross-bedded sandstone rock in the Stimson geological unit on Sept. 29, or Sol 1119. Stimson is located on the lower slopes of Mount Sharp inside Gale Crater.
NASA Curiosity rover reaches out with robotic arm to drill into cross-bedded sandstone rock at ‘Big Sky’ target on Sol 1119, Sept. 29, 2015, in this photo mosaic stitched from navcam camera raw images and colorized. Big Sky is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“Success! Our drill at “Big Sky” went perfectly!” wrote Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center and a member of the Curiosity ChemCam team.
The drill hole is seen at the lower left corner of the MAHLI camera selfie and appears grey along with grey colored tailing – in sharp contrast to the rust red surface. The hole itself is 0.63 inch (1.6 centimeters) in diameter.
Another panoramic view of the ‘Big Sky’ location shot from the rover’s eye perspective with the mast mounted Navcam camera, is shown in our photo mosaic view herein and created by the image processing team of Ken Kremer and Marco Di Lorenzo. The navcam mosaic was stitched from raw images taken up to Sol 1119 and colorized.
“With Big Sky, we found the ordinary sandstone rock we were looking for,” said Curiosity Project Scientist Ashwin Vasavada, in a statement.
The Big Sky drilling operation is part of a coordinated multi-step campaign to examine different types of sandstone rocks to provide geologic context.
“It also happens to be relatively near sandstone that looks as though it has been altered by fluids — likely groundwater with other dissolved chemicals. We are hoping to drill that rock next, compare the results, and understand what changes have taken place.”
Per normal operating procedures, the Big Sky sample was collected for analysis of the Martian rock’s ingredients in the rover’s two onboard laboratories – the Chemistry and Mineralogy X-Ray diffractometer (CheMin) and the Sample Analysis at Mars (SAM) instrument suite.
“We are all eagerly looking forward to the CheMin results from Big Sky to compare with our previous results from “Buckskin”! noted Anderson.
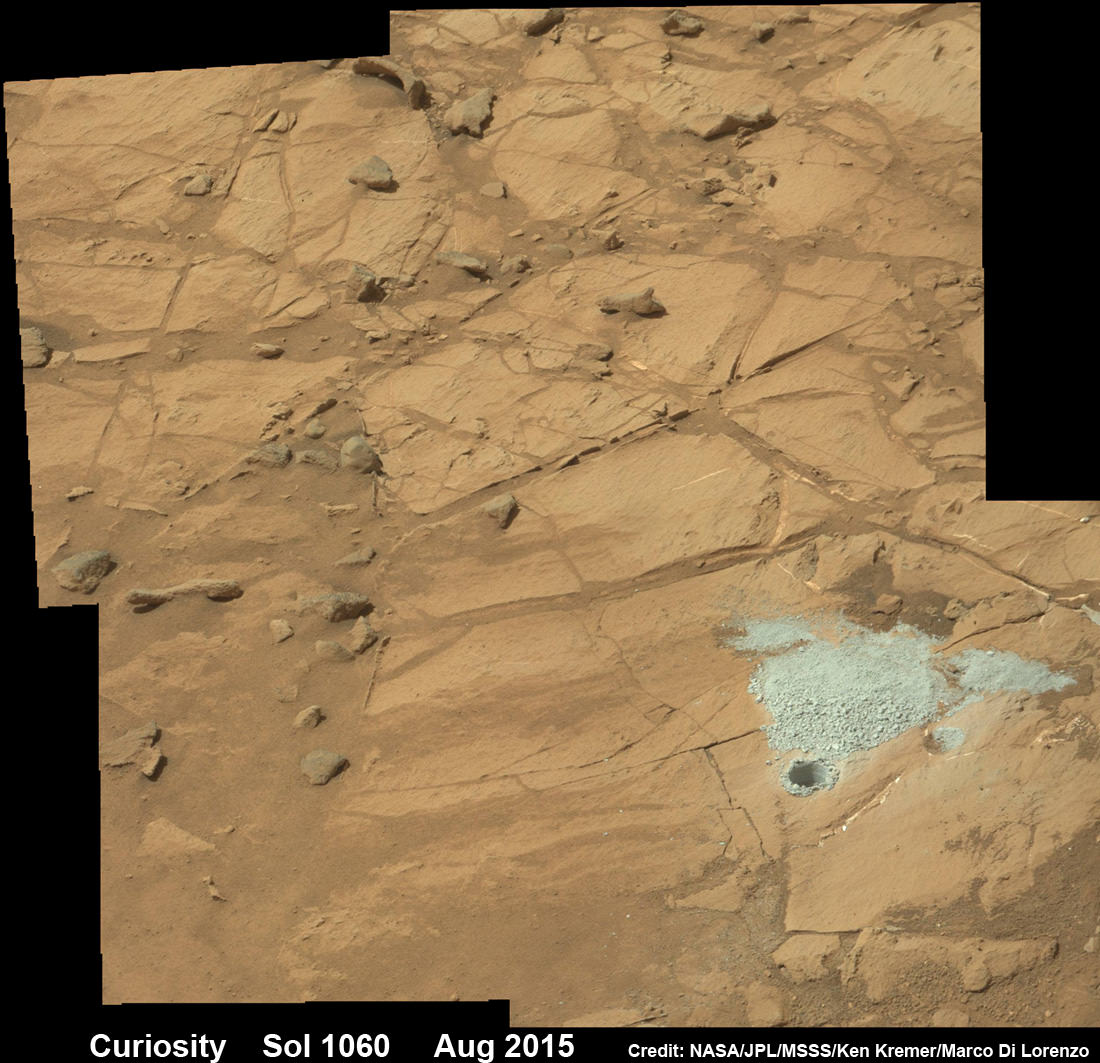
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
This past weekend, Curiosity successfully fed pulverized and sieved samples of Big Sky to the inlet ports for both CheMin and SAM on the rover deck.
“The SAM analysis of the Big Sky drill sample went well and there is no need for another analysis, so the rest of the sample will be dumped out of CHIMRA on Sol 1132,” said Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
Concurrently the team is hard at work readying the rover for the next drill campaign within days, likely at a target dubbed “Greenhorn.”
So the six wheeled rover drove about seven meters to get within range of Greenhorn.
With the sample deliveries accomplished, attention shifted to the next drilling campaign.
Today, Wednesday, Oct. 14, or Sol 1133, Curiosity was commanded “to dump the “Big Sky” sample and “thwack” CHIMRA (the Collection and Handling for in-Situ Martian Rock Analysis) to clean out any remnants of the sample,” wrote Lauren Edgar, a Research Geologist at the USGS Astrogeology Science Center and a member of MSL science team, in a mission update.
The ChemCam and Mastcam instruments are simultaneously making observations of the “Greenhorn” and “Gallatin Pass” targets “to assess chemical variations across a fracture.”
This Martian “postcard” comes after Mars Curiosity drilled its eighth hole on the Red Planet. This composite image looking toward the higher regions of Mount Sharp was taken on September 9, 2015, by NASA’s Curiosity rover. In the foreground — about 2 miles (3 kilometers) from the rover — is a long ridge teeming with hematite, an iron oxide. Credits: NASA/JPL-Caltech/MSSS
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
As of today, Sol 1133, October 14, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 274,600 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
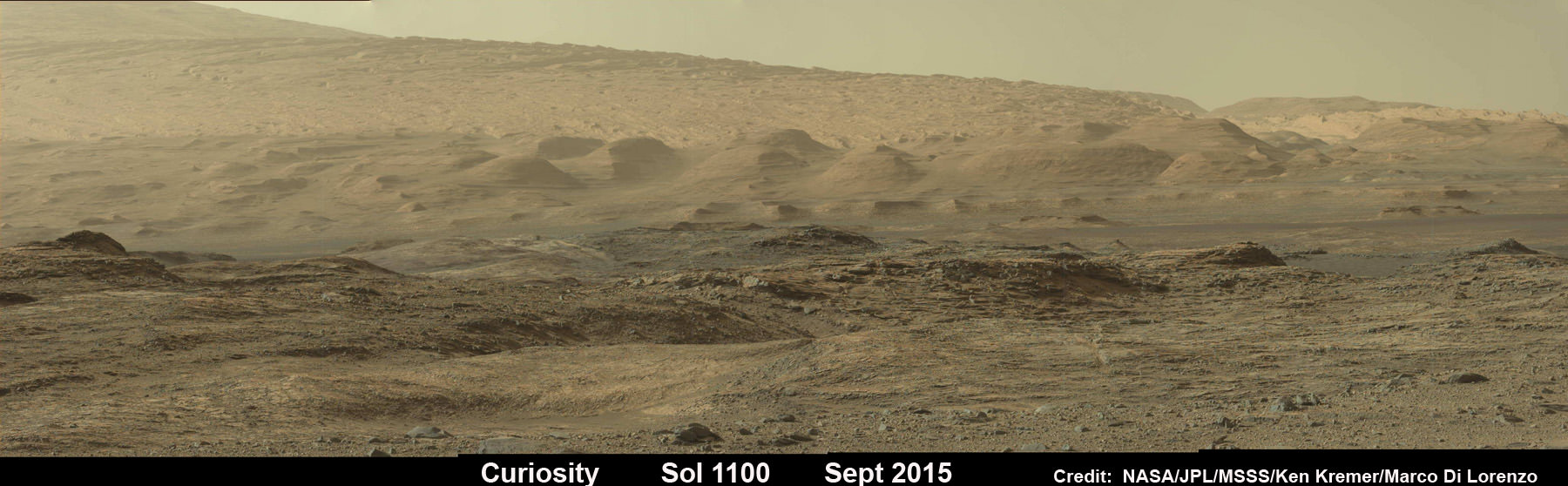
Curiosity looks toward fabulous canyons and buttes at the base of Mount Sharp from the Stimson sand dunes on Mars on Sol 1100, Sept. 10 2015 in this photo mosaic stitched from Mastcam color camera raw images. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
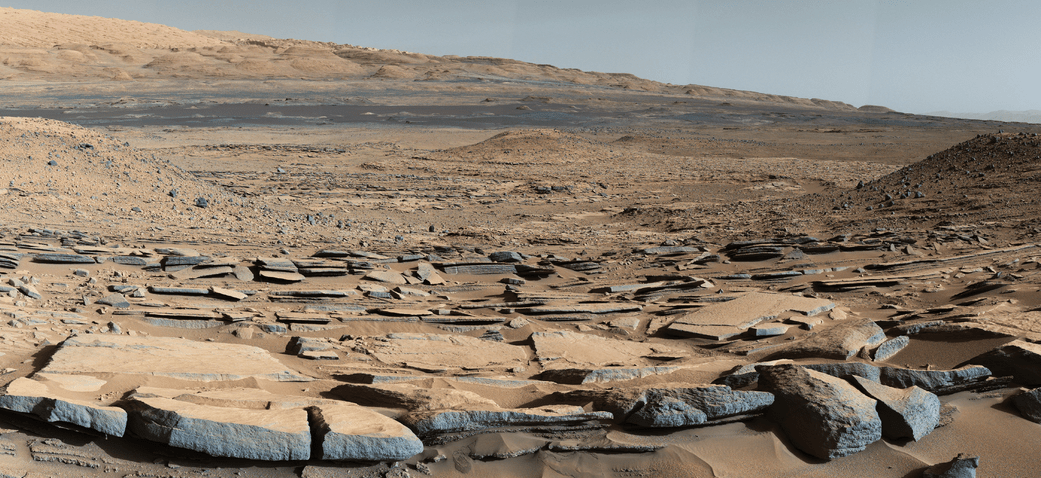
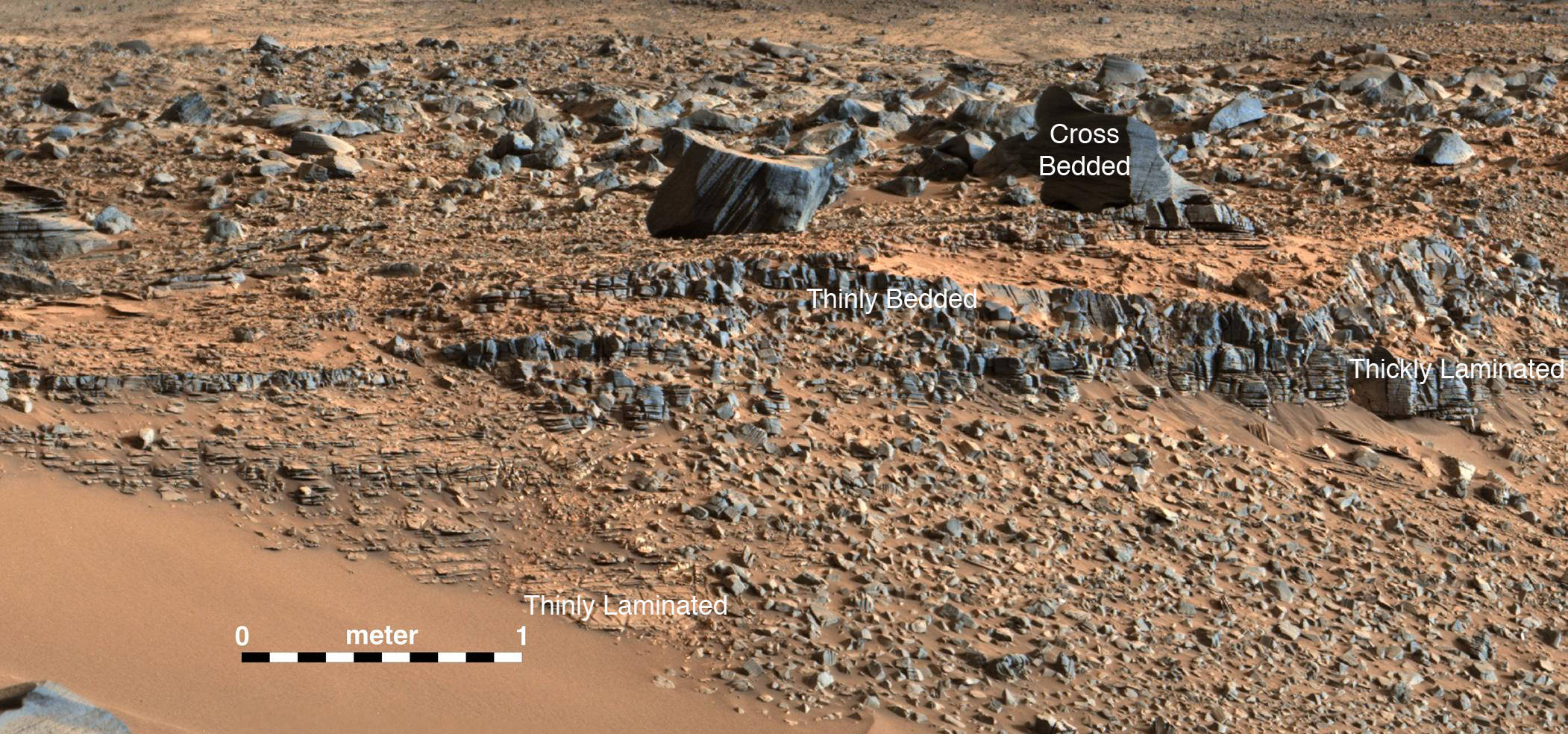
A view from the "Kimberley" formation on Mars taken by NASA's Curiosity rover. The strata in the foreground dip towards the base of Mount Sharp, indicating flow of water toward a basin that existed before the larger bulk of the mountain formed. This image was taken by the Mast Camera (Mastcam) on Curiosity on Sol 580 of the mission and has been “white balanced” to adjust for the lighting on Mars make the sky appear light blue. Credits: NASA/JPL-Caltech/MSSS
A view from the “Kimberley” formation on Mars taken by NASA’s Curiosity rover. The strata in the foreground dip towards the base of Mount Sharp, indicating flow of water toward a basin that existed before the larger bulk of the mountain formed. This image was taken by the Mast Camera (Mastcam) on Curiosity on Sol 580 of the mission and has been “white balanced” to adjust for the lighting on Mars make the sky appear light blue. Credits: NASA/JPL-Caltech/MSSS
Story/imagery updated[/caption]
Hot on the heels of NASA’s groundbreaking announcement on Sept. 28 of the discovery that “liquid water flows intermittently” across multiple spots on the surface of today’s Mars, scientists leading NASA’s Curiosity rover mission have confirmed that an ancient lake once filled the Gale Crater site which the robot has been methodically exploring since safely landing back in August 2012 near the base of a layered mountain known as Mount Sharp.
The new research finding from the Curiosity team was just published in the journal Science on Friday, Oct. 9, and boosts the chances that alien life may have taken hold in the form of past or present day Martian microbes.
The article is titled “Wet Paleoclimate of Mars Revealed by Ancient Lakes at Gale Crater,” with John Grotzinger, the former project scientist for the Mars Science Laboratory (MSL) mission at the California Institute of Technology in Pasadena, as lead author of the new report.
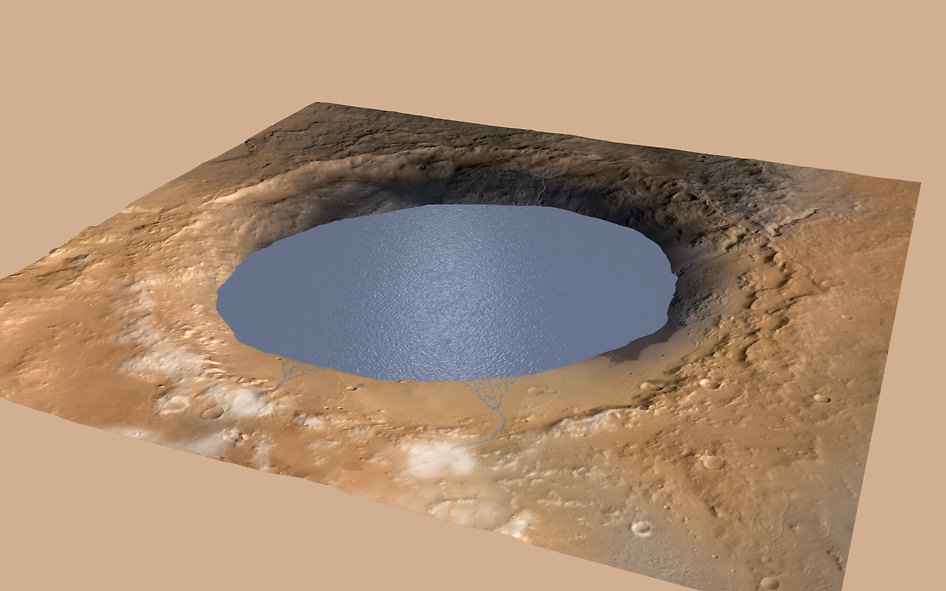
Simulated view of Gale Crater Lake on Mars. This illustration depicts a lake of water partially filling Mars’ Gale Crater, receiving runoff from snow melting on the crater’s northern rim. Credit: NASA/JPL-Caltech/ESA/DLR/FU Berlin/MSSS
The new study is coauthored by four dozen team members intimately involved in Curiosity’s ongoing exploits and “confirmed that Mars was once, billions of years ago, capable of storing water in lakes over an extended period of time.”
“Observations from the rover suggest that a series of long-lived streams and lakes existed at some point between about 3.8 to 3.3 billion years ago, delivering sediment that slowly built up the lower layers of Mount Sharp,” said Ashwin Vasavada, current MSL project scientist at NASA’s Jet Propulsion Laboratory in Pasadena, California, and co-author of the new report, in a statement.
Over the past three years, the Curiosity Mars Science Laboratory rover has been traversing the floor of Gale Crater investigating scores of different rocks and outcrops with her suite of state-of-the-art instruments, and painstakingly analyzing drill samples cored from their interiors with a pair of chemistry labs to elucidate the history of Mars based on NASA’s “follow the water” mantra.
The soundness of NASA Mars exploration strategy has repeatedly borne fruit and is now validated by overwhelming measurements gathered during Curiosity’s epic Martian trek confirming the existence of a lake where Mount Sharp now stands.
Exploring the sedimentary layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
Since the nail biting touchdown on Aug. 5, 2012, Curiosity has been on a path towards the sedimentary layers at the lower reaches of Mount Sharp at the center of Gale Crater.
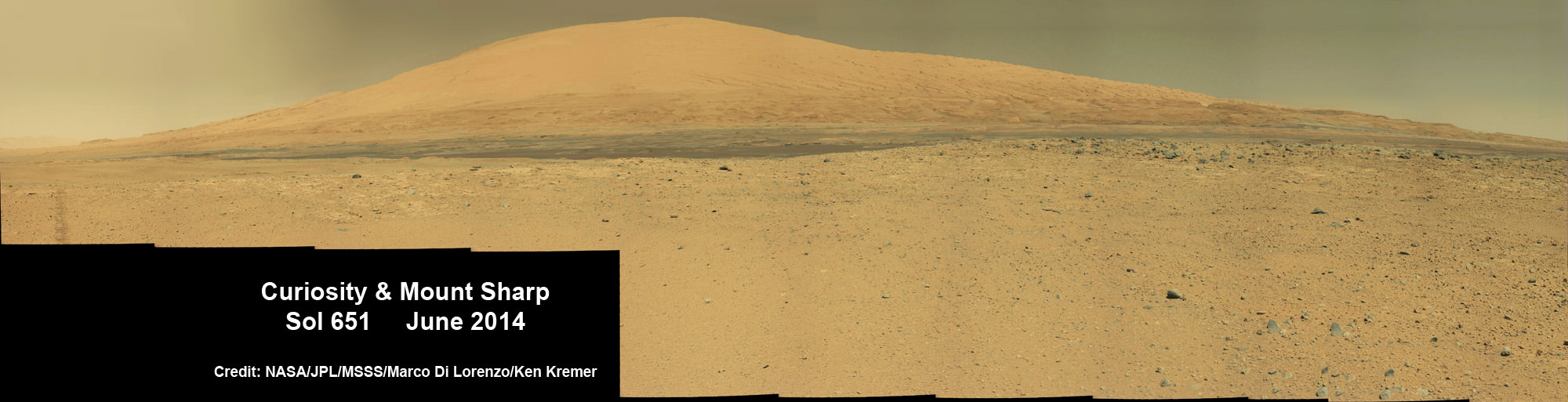
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
The car sized robot arrived at the foothills of Mount Sharp a year ago in September 2014, marking the start of the mountains formal investigation.
But the origin of Mount Sharp has been up for debate.
With the new data, researchers believe that the ancient lake helped fill Gale Crater with sediments deposited in layers over time that formed the foundation for Mount Sharp which now dominates the center of the crater.
“What we thought we knew about water on Mars is constantly being put to the test,” said Michael Meyer, lead scientist for NASA’s Mars Exploration Program at NASA Headquarters in Washington.
“It’s clear that the Mars of billions of years ago more closely resembled Earth than it does today. Our challenge is to figure out how this more clement Mars was even possible, and what happened to that wetter Mars.”
Mars was far wetter and warmer and possessed a much more massive atmosphere billions of years ago than it does today.
An image taken at the “Hidden Valley” site, en-route to Mount Sharp, by NASA’s Curiosity rover. A variety of mudstone strata in the area indicate a lakebed deposit, with river- and stream-related deposits nearby. This image was taken by the Mast Camera (Mastcam) on Curiosity on Sol 703. Credits: NASA/JPL-Caltech/MSSS
Gale Crater lake existed long before Mount Sharp ever formed during that period billions of years ago when the Red Planet was far warmer and wetter.
“Paradoxically, where there is a mountain today there was once a basin, and it was sometimes filled with water,” said Grotzinger, in a statement.
“We see evidence of about 250 feet (75 meters) of sedimentary fill, and based on mapping data from NASA’s Mars Reconnaissance Orbiter and images from Curiosity’s camera, it appears that the water-transported sedimentary deposition could have extended at least 500 to 650 feet (150 to 200) meters above the crater floor.”
Indeed there is additional evidence that the sedimentary deposits from interaction with water may be as thick as one-half mile (800 meters) above the crater floor. However beyond that there is no evidence of hydrated strata further up Mount Sharp.
But for reasons we are still trying to decipher and comprehend, Mars underwent radical climactic change between 3 and 4 billion years ago and was transformed from an ancient wet world, potentially hospitable to life, to a cold, dry desiccated world, rather inhospitable to life, that exists today.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo. Featured on APOD – Astronomy Picture of the Day on May 7, 2014
Unlocking the mysteries, mechanisms and time periods of Mars climate change, loss of a thick atmosphere, ability to sustain liquid surface water and searching for organic compounds and for evidence of past or present habitable zones favorable to life are the questions driving NASA’s Mars Exploration program
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
NASA’s Curiosity rover looks back to ramp with potential 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
“We have tended to think of Mars as being simple,” Grotzinger mused. “We once thought of the Earth as being simple too. But the more you look into it, questions come up because you’re beginning to fathom the real complexity of what we see on Mars. This is a good time to go back to reevaluate all our assumptions. Something is missing somewhere.”
As of today, Sol 1129, October 10, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 274,000 amazing images.
Curiosity is at the vanguard of Earth’s fleet of seven robotic missions paving the path for NASA’s plans to send humans on a ‘Journey to Mars’ in the 2030s.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Curiosity Mars rover captured this panoramic view of a butte called “Mount Remarkable” and surrounding outcrops at “The Kimberley ” waypoint on April 11, 2014, Sol 597. Colorized navcam photomosaic was stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
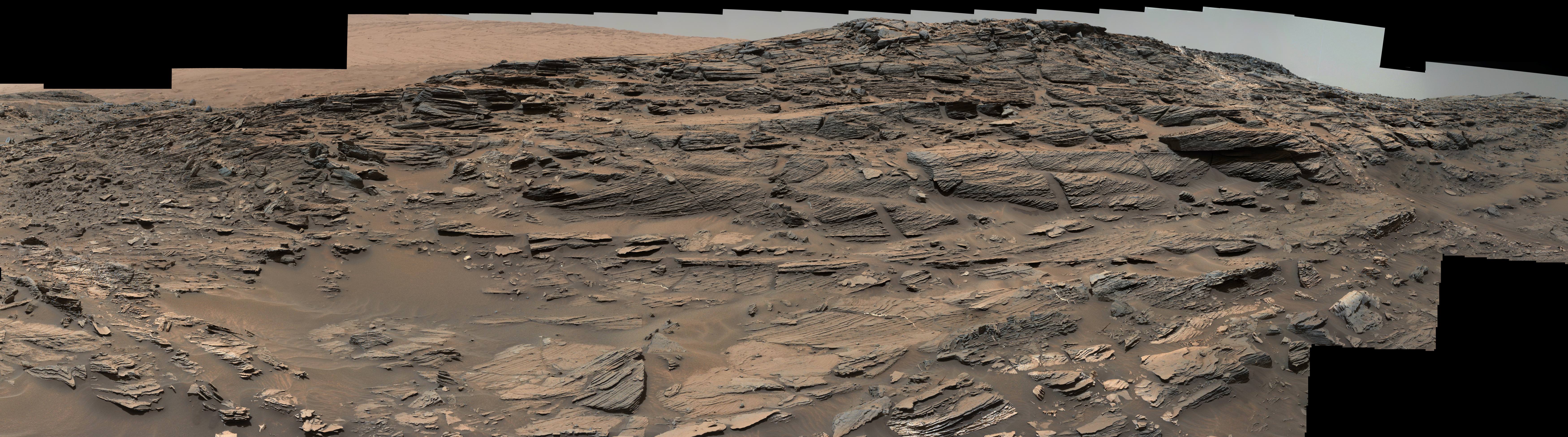
Large-scale crossbedding in the sandstone of this ridge on a lower slope of Mars' Mount Sharp is typical of windblown sand dunes that have petrified. NASA's Curiosity Mars rover used its Mastcam to capture this vista on Aug. 27, 2015, Sol 1087. Similarly textured sandstone is common in the U.S. Southwest. Credits: NASA/JPL-Caltech/MSSS
Large-scale crossbedding in the sandstone of this ridge on a lower slope of Mars’ Mount Sharp is typical of windblown sand dunes that have petrified. NASA’s Curiosity Mars rover used its Mastcam to capture this vista on Aug. 27, 2015, Sol 1087. Similarly textured sandstone is common in the U.S. Southwest. Credits: NASA/JPL-Caltech/MSSS
See Sol 1100 mosaic below [/caption]
NASA’s SUV-sized Curiosity rover has arrived at a beautiful Martian vista displaying a huge deposit of magnificently petrified sand dunes that look remarkably like some commonly found on Earth and native to the deserts of the U.S. Southwest.
The petrified sand dunes were discovered amongst an area of dark sandstone along a ridge at the lower slope of Mars’ Mount Sharp. They are now being explored in detail by the six wheeled rover in a geologic feature dubbed the Stimson unit.
“The team is considering where to drill next within the Stimson sandstone and we are looking for the best light toned areas to check for mineralogical signs of water-rock reaction,” says John Bridges, rover team member from the University of Leicester, England, in the latest mission update from today, September 12, 2015.
Curiosity looks toward fabulous canyons and buttes at the base of Mount Sharp from the Stimson sand dunes on Mars on Sol 1100, Sept. 10 2015 in this photo mosaic stitched from Mastcam color camera raw images. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity also discovered large-scale crossbedding in the sandstone that were formed by the action of Martian winds.
“This sandstone outcrop — part of a geological layer that Curiosity’s science team calls the Stimson unit — has a structure called crossbedding on a large scale that the team has interpreted as deposits of sand dunes formed by wind,” according to the rover team.
So Curiosity was commanded by her handlers back on Earth to capture an array of high resolution imagery as part of detailed investigation of the area for up close and contact science.
Dozens of images were taken with the pair of high resolution Mastcam color cameras on the robots mast and combined into the panoramic scene show above and another shown below with a scalebar the length of a tall human, 6.6 feet or 200 centimeters.
Large-scale crossbedding in the sandstone of this ridge on a lower slope of Mars’ Mount Sharp is typical of windblown sand dunes that have petrified. NASA’s Curiosity Mars rover used its Mastcam to capture this vista on Aug. 27, 2015. Similarly textured sandstone is common in the U.S. Southwest. Credits: NASA/JPL-Caltech/MSSS
The images were taken on Aug. 27, 2015, corresponding to Sol 1087 of the rover’s work on Mars, using both the 34 millimeter-focal-length lens and the 100 mm millimeter-focal-length telephoto Mastcam camera lenses that function as Curiosity’s left and right eyes.
The panorama spans the Martian terrain looking from the east, at left, to the south-southwest at right.
“Some of the dark sandstone in the area …. shows texture and inclined bedding structures characteristic of deposits that formed as sand dunes, then were cemented into rock” say officials.
“Sets of bedding laminations lie at angles to each other.”
Since taking the panorama in late August, the team has driven Curiosity around the area to collect more measurements with her state of the art science instruments.
Later this month, Curiosity will drill into an outcrop at the Stimson unit sandstone for collection and feed it for analysis into the pair of on board chemistry labs – SAM and CheMin- located inside the rover’s belly.
Curiosity already carried out initial contact science in the area by extending the robotic arm to rock targets for investigation with the arm mounted instruments, including the MAHLI camera and APXS spectrometer.
Curiosity “investigated an outcrop of the Stimson unit … and conducted successful contact science,” says Lauren Edgar, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
Scientists will select the Stimson drill target soon.
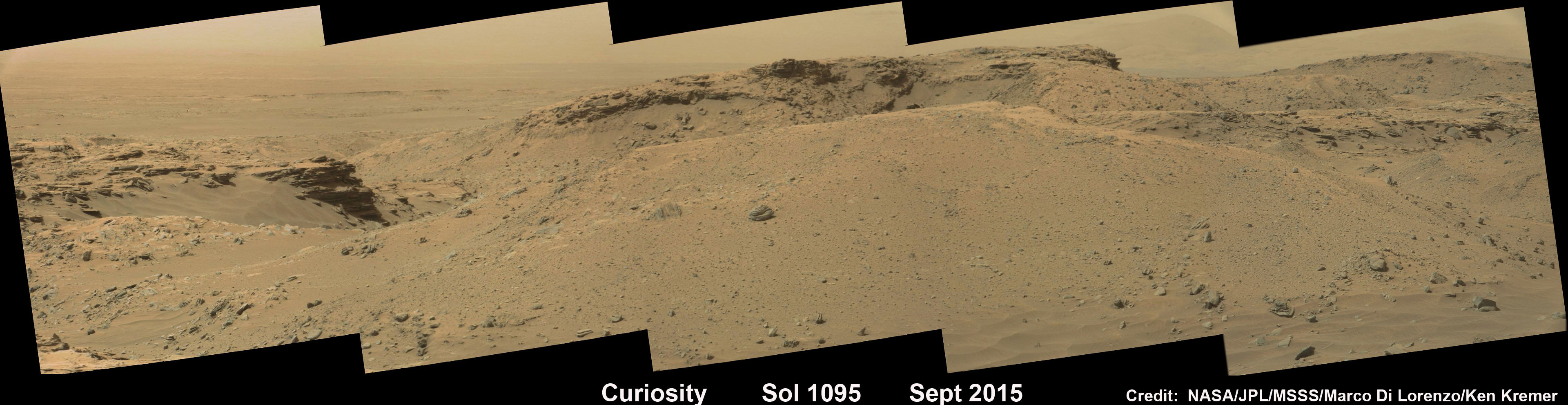
Curiosity rover explores around the Stimson unit at the base of Mount Sharp on Mars on Sol 1095, Sept. 5, 2015 in this photo mosaic stitched from Mastcam color camera raw images. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Why explore outcrops at Stimson?
“The Stimson unit overlies a layer of mudstone that was deposited in a lake environment. Curiosity has been examining successively higher and younger layers of Mount Sharp, starting with the mudstone at the mountain’s base, for evidence about changes in the area’s ancient environment.”
Curiosity’s prior drill campaign was recently conducted at the “Buckskin” outcrop target in early August 2015. Buckskin was very notable for being the first high silica rock drilling target of the mission.
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Stimson and Buckskin sit at the base of Mount Sharp, a huge layered mountain that dominates the center of the 96 mile-wide (154 kilometers-wide) Gale Crater landing site.
Exploring the sedimentary layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
As of today, Sol 1102, September 12, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 268,000 amazing images.
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
Curiosity rover scans toward south east around Marias Pass area at the base of Mount Sharp on Mars on Sol 1074, Aug. 14, 2015 in this photo mosaic stitched from Mastcam color camera raw images. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
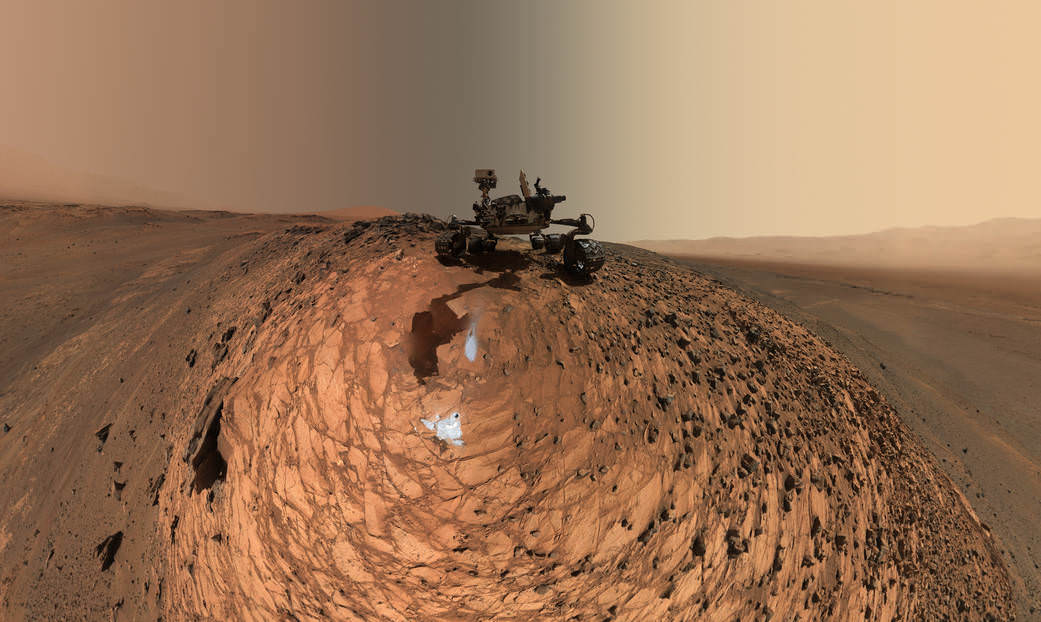
This low-angle self-portrait of NASA's Curiosity Mars rover shows the vehicle at the site from which it reached down to drill into a rock target called "Buckskin." The MAHLI camera on Curiosity's robotic arm took multiple images on Aug. 5, 2015, that were stitched together into this selfie. Credits: NASA/JPL-Caltech/MSSS
This low-angle self-portrait of NASA’s Curiosity Mars rover shows the vehicle at the site from which it reached down to drill into a rock target called “Buckskin.” The MAHLI camera on Curiosity’s robotic arm took multiple images on Aug. 5, 2015, that were stitched together into this selfie. Credits: NASA/JPL-Caltech/MSSS
More selfie and drilling mosaics below[/caption]
The unique self portrait was taken from a low-angle for the first time and shows the six wheeled rover at work collecting her seventh drilled sample at the ‘Buckskin’ rock target earlier this month in the “Marias Pass” area of lower Mount Sharp.
‘Buckskin’ is also unique in a fabulously scientifically way because the rover discovered a new type of Martian rock that’s surprisingly rich in silica – and unlike any other targets found before.
The low camera angle is what enables the awesome Buckskin belly selfie. It’s a distinctively dramatic view and actually stitched from 92 images captured by the Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, or Sol 1065 of the mission.
The high resolution MAHLI color camera is located on the end of the 7 foot-long (2.1 meter-long) robotic arm.
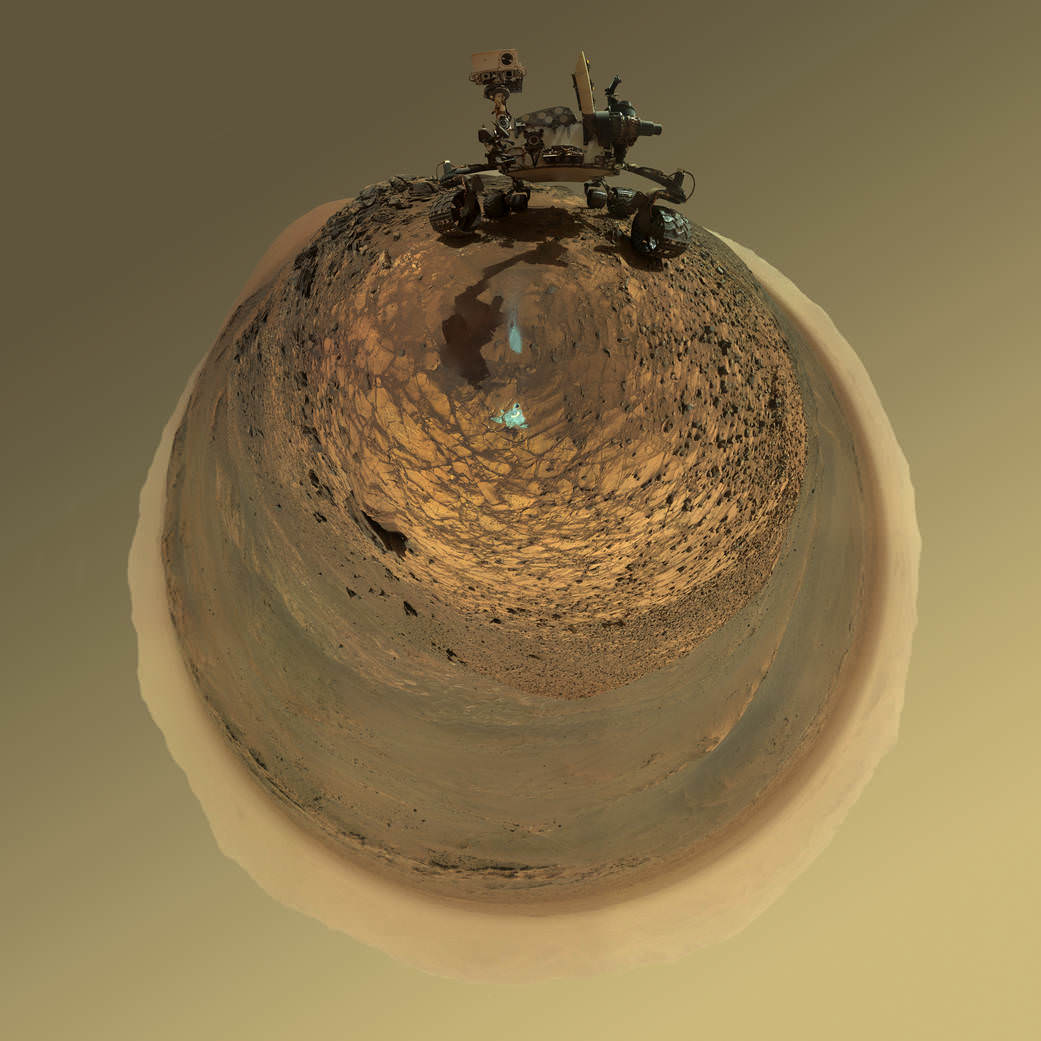
This version of a self-portrait of NASA’s Curiosity Mars rover at a drilling site called “Buckskin” is presented as a stereographic projection, which shows the horizon as a circle. The MAHLI camera on Curiosity’s robotic arm took dozens of component images for this selfie on Aug. 5, 2015. Credits: NASA/JPL-Caltech/MSSS
Indeed the car-sized rover has taken spectacular selfies several times before during her three year long trek across the Martian surface, since the August 2012 landing inside Mars’ Gale Crater. But for those past selfies the MAHLI camera was hoisted higher to give the perspective of looking somewhat downward and showing the rovers top deck and trio of sample inlet ports.
In this case, the rover team specifically commanded Curiosity to position “the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity,” said NASA officials.
Two patches of gray colored powdered rock material drilled from Buckskin are visible in the selfie scene, in front of the rover.
“The patch closer to the rover is where the sample-handling mechanism on Curiosity’s robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process.”
Prior selfies were taken at the “Rocknest” (http://photojournal.jpl.nasa.gov/catalog/PIA16468), “John Klein” (http://photojournal.jpl.nasa.gov/catalog/PIA16937), “Windjana” (http://photojournal.jpl.nasa.gov/catalog/PIA18390) and “Mojave” drill sites.
Basically in the Sol 1065 belly selfie at “Buckskin” we see the underbelly of the rover and all six wheels along with a complete self portrait.
This version of a self-portrait of NASA’s Curiosity Mars rover at a drilling site called “Buckskin” is presented as a stereographic projection, which shows the horizon as a circle. The MAHLI camera on Curiosity’s robotic arm took dozens of component images for this selfie on Aug. 5, 2015. Credits: NASA/JPL-Caltech/MSSS
On several prior occasions, MAHLI was used to image just the underbelly and wheels to aid in inspecting the wheels to look for signs of damage inflicted by sharp-edged Martian rocks poking holes in the aluminum wheels.
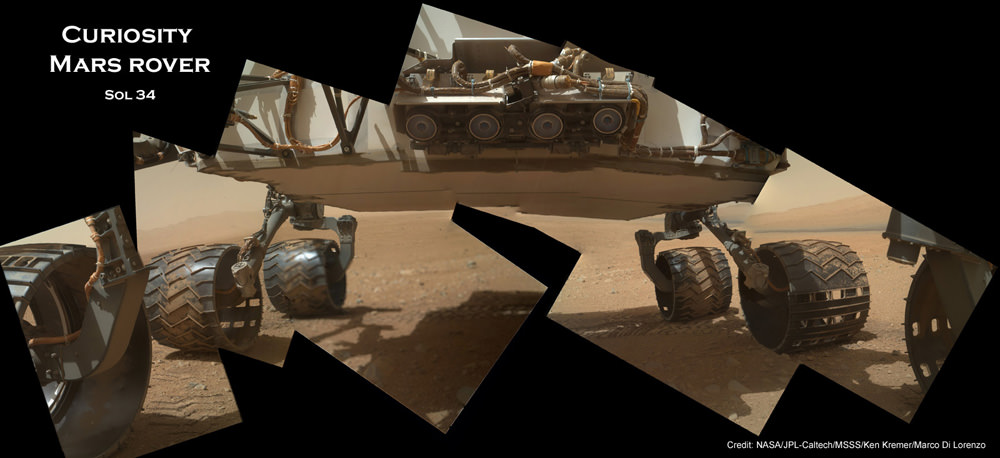
Underbelly view of Curiosity rover and wheels on Sol 34, Sept. 9, 2012. Credit: NASA/JPL/MSSS/Ken Kremer/Marco Di Lorenzo
Each wheel measures 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide. And the MAHLI monitoring images have shown the effects of increasing wear and tear that ultimately forced the rover drivers to alter Curiosity’s driving route on the crater floor in favor of smoother and less rocky terrain imparting less damage to the critical wheels.
If you take a close look at the new selfie up top, you’ll see a small rock stuck onto Curiosity’s left middle wheel (on the right in this head-on view). The rock was seen also in prior wheel monitoring images taken three weeks ago.
“The selfie at Buckskin does not include the rover’s robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic,” according to officials.
The drilling campaign into “Buckskin” was successfully conducted on Sol 1060 (July 30, 2015) at the bright toned “Lion” outcrop to a full depth of about 2.6 inches (6.5 centimeters) and approximately 1.6 cm (0.63 inch) diameter.
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
You can also see another perspective of the rover at work while reaching out with the robotic arm and drilling into ‘Buckskin’ as illustrated in our mosaics of mastcam and navcam camera raw images created by the image processing team of Ken Kremer and Marco Di Lorenzo.
The main bore hole was drilled next to the initial mini hole test and shows the indicative residue of grey colored tailings from the Martian subsurface seen distributed around the new hole.
Curiosity rover successfully drills into Martian outcrop at Buckskin rock target at current work site at base of Mount Sharp in August 2015, in this mosaic showing full depth drill hole and initial test hole, with grey colored subsurface tailings and mineral veins on surrounding Red Planet terrain. This high resolution photo mosaic is a multisol composite of color images taken by the mast mounted Mastcam-100 color camera up to Sol 1060, July 31, 2015. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity has now moved on from the “Marias Pass” area.
As of today, Sol 1080, August 20, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 260,000 amazing images.
Curiosity rover scans toward south east around Marias Pass area at the base of Mount Sharp on Mars on Sol 1074, Aug. 14, 2015 in this photo mosaic stitched from Mastcam color camera raw images. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.