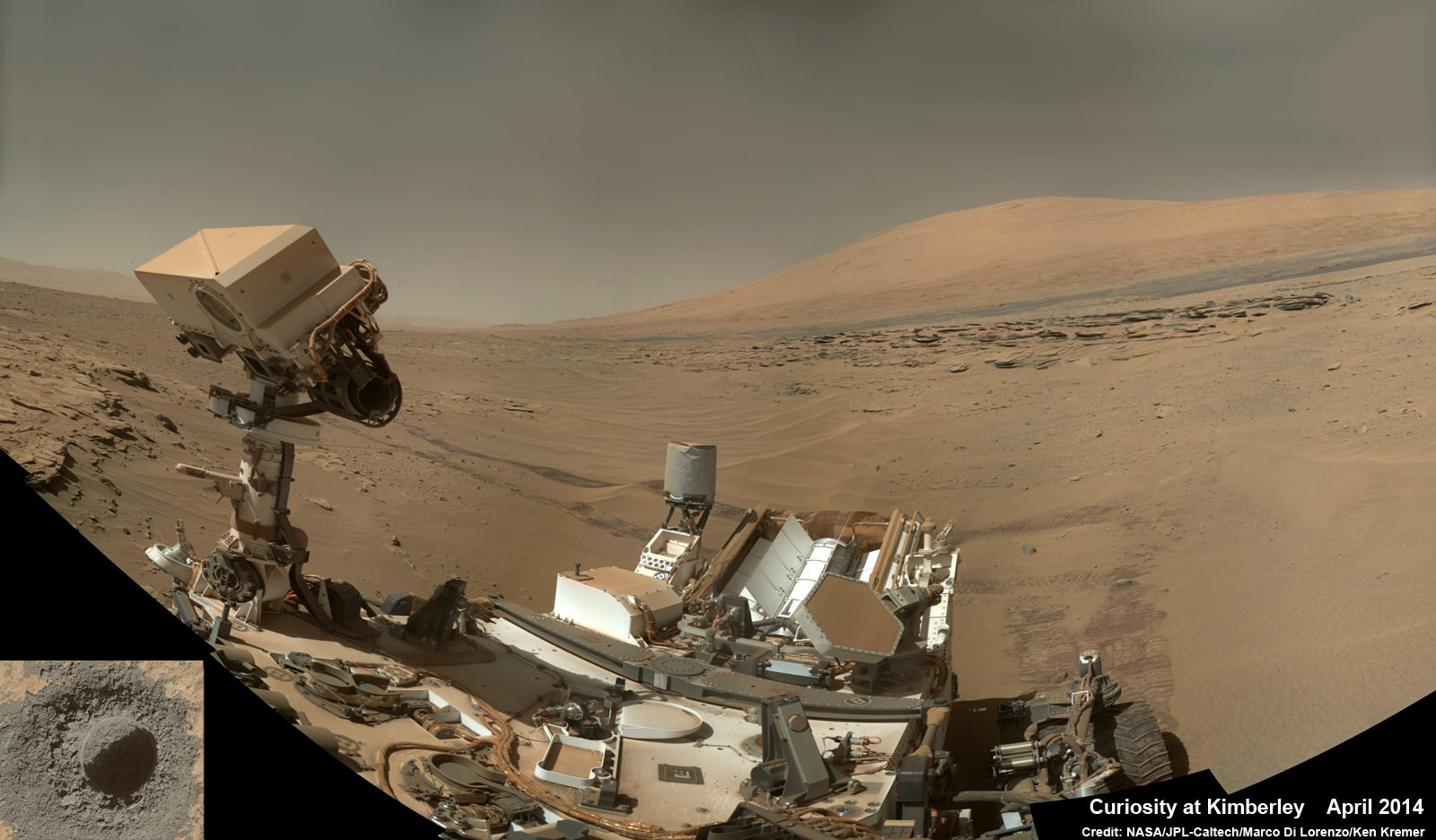
NASA’s rover Curiosity said ‘Goodbye Kimberley’ having fulfilled her objectives of drilling into a cold red sandstone slab, sampling the tantalizing grey colored interior and pelting the fresh bore hole with a pinpoint series of parting laser blasts before seeking new adventures on the road ahead towards the inviting slopes of Mount Sharp, her ultimate destination.
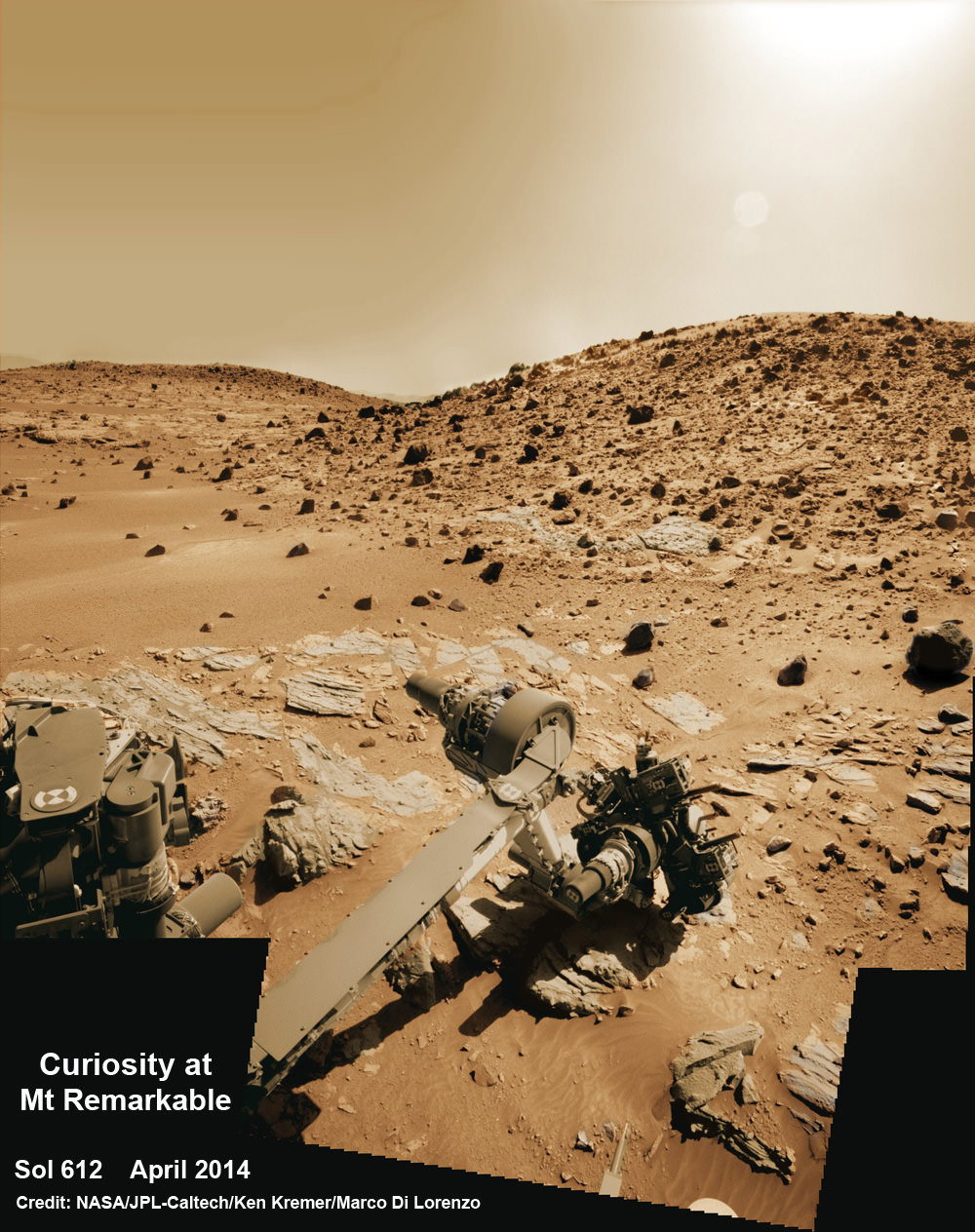
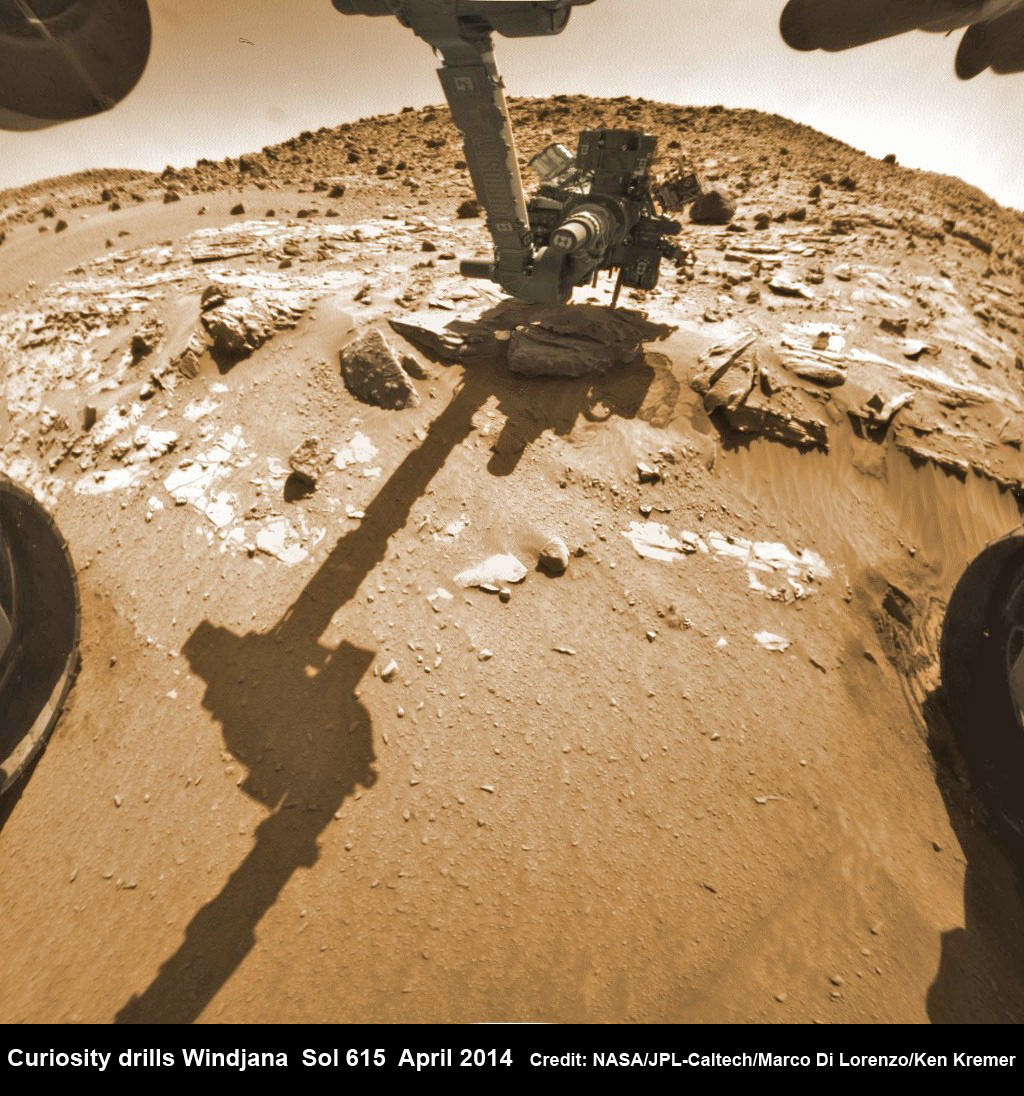
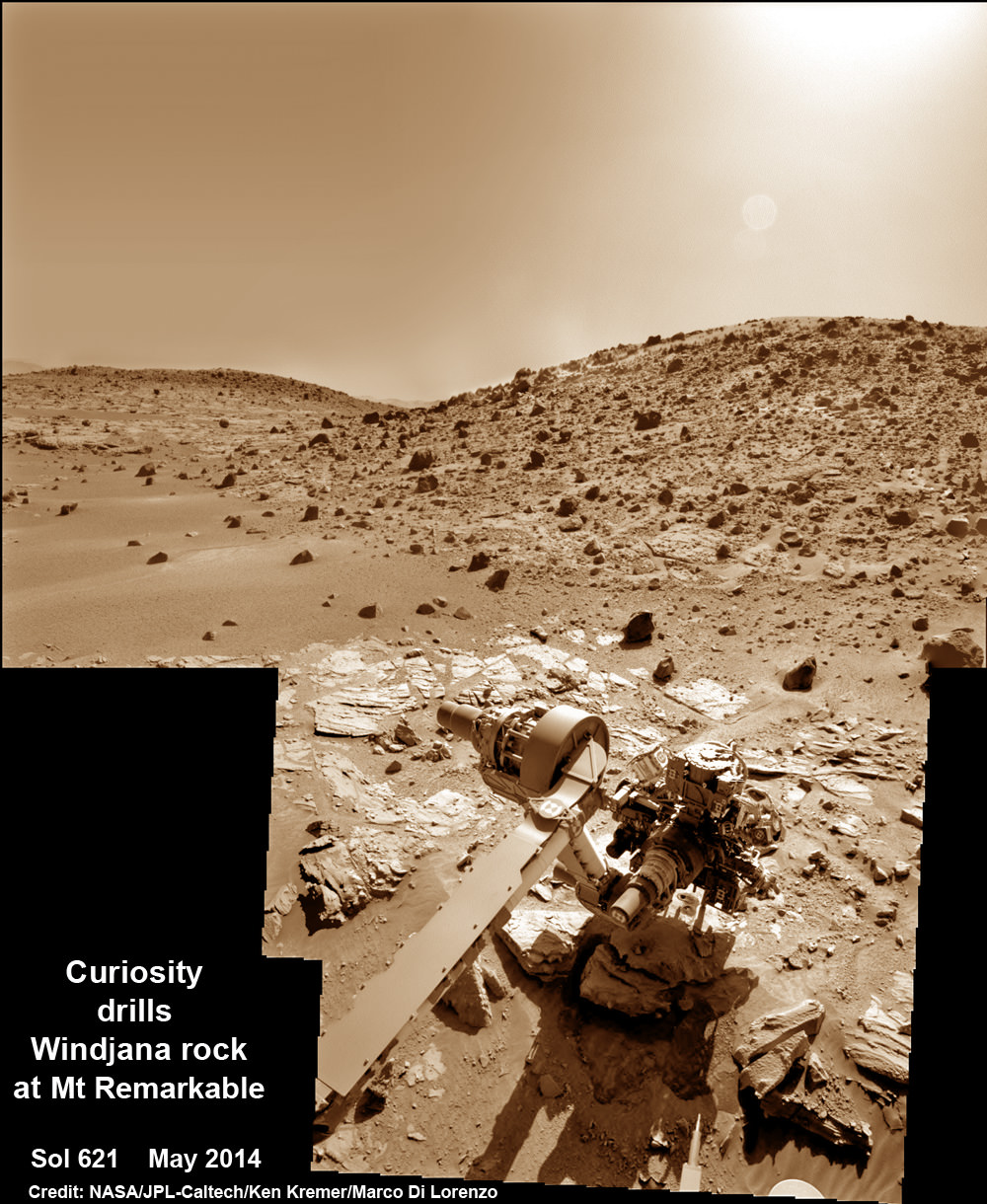
Curiosity successfully drilled her 3rd hole deep into the ‘Windjama’ rock target at the base of Mount Remarkable and within the science waypoint at a region called “The Kimberley” on May 5, Sol 621.
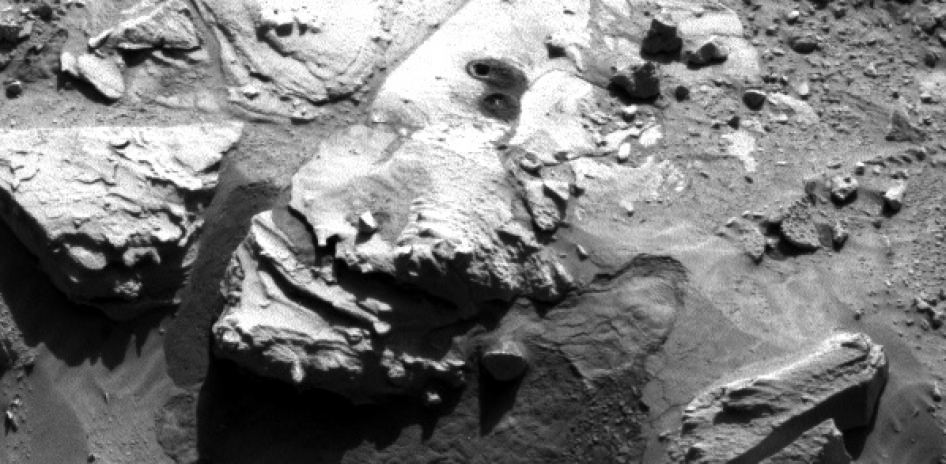
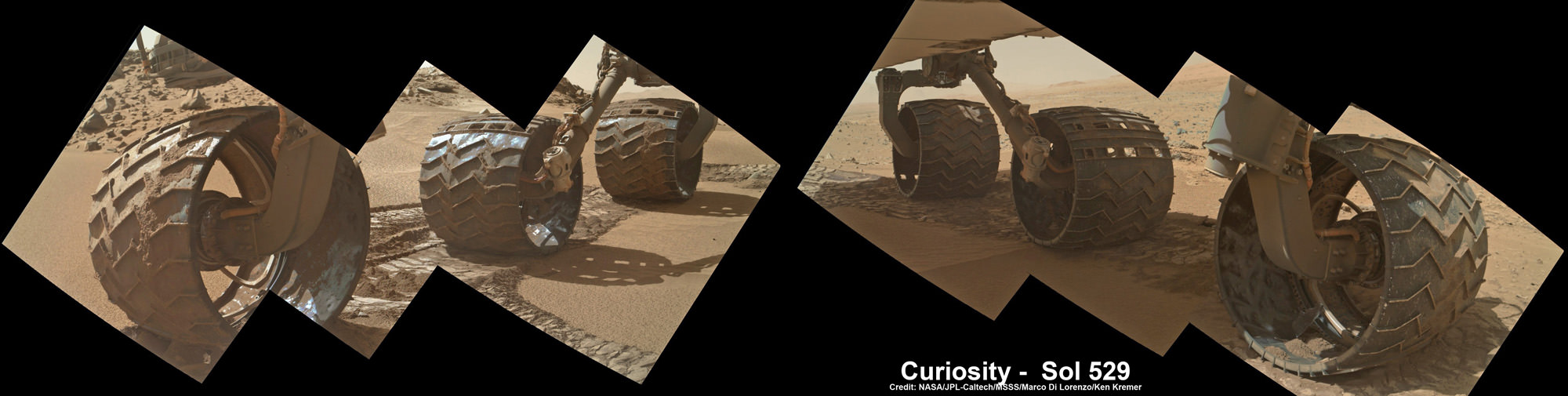
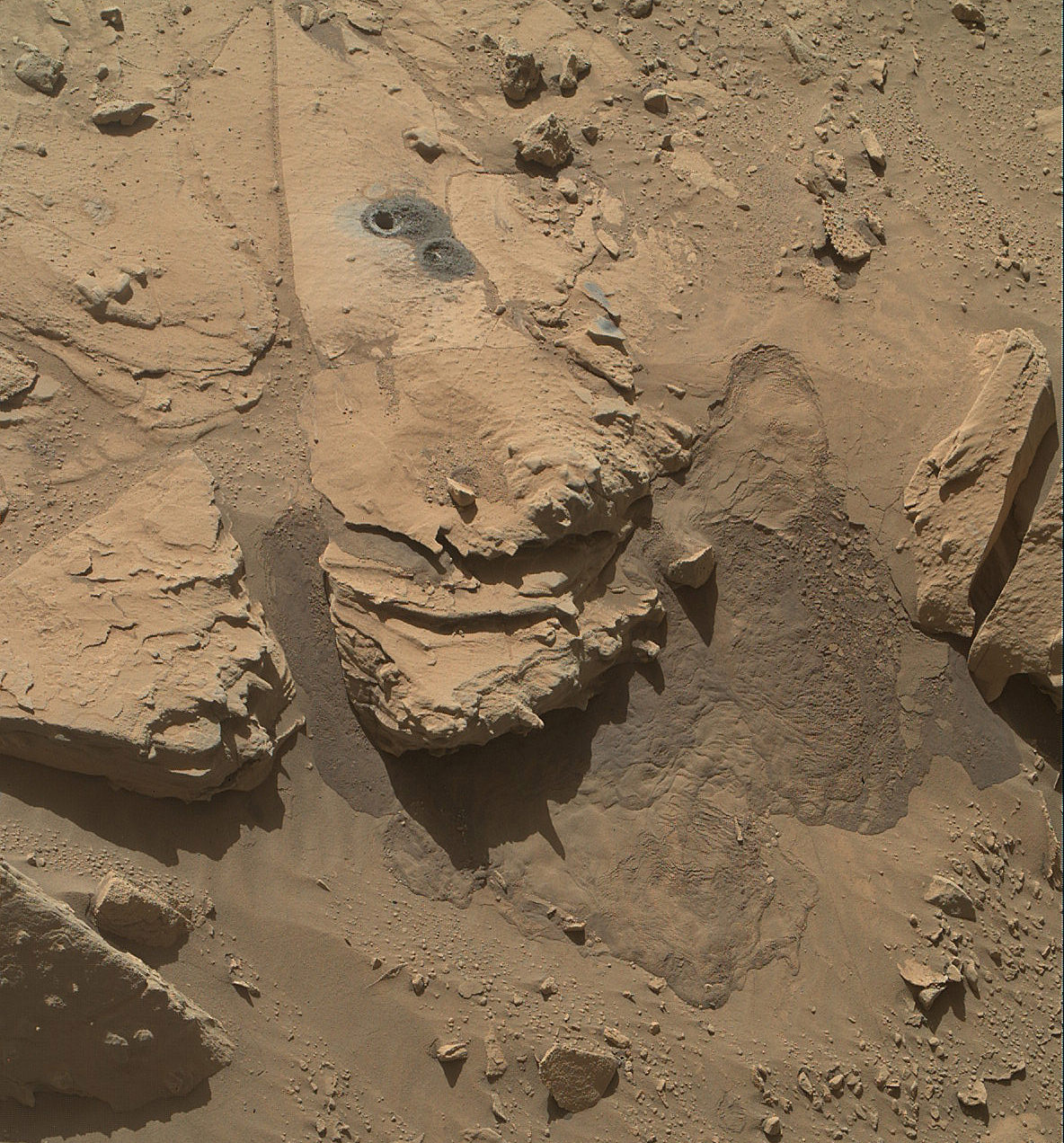
Since then, the 1 ton robot carefully scrutinized the resulting 2.6 inches (6.5 centimeters) deep bore hole and the mound of dark grey colored drill tailings piled around for an up close examination of the texture and composition with the MAHLI camera and spectrometers at the end of her 7-foot-long (2 meters) arm to glean every last drop of science before moving on.

Multiple scars clearly visible inside the drill hole and on the Martian surface resulting from the million watt laser firings of the Mast mounted Chemistry and Camera (ChemCam) instrument left no doubt of Curiosity’s capabilities or intentions.
Furthermore she successfully delivered pulverized and sieved samples to the pair of onboard miniaturized chemistry labs; the Chemistry and Mineralogy instrument (CheMin) and the Sample Analysis at Mars instrument (SAM) – for chemical and compositional analysis.
Curiosity completed an “intensive investigation of ‘The Kimberley’, having successfully drilled, acquired and dropped samples into CheMin and SAM,” wrote science team member Ken Herkenhoff in an update.
“MAHLI has taken lots of excellent images of the drill hole, including some during the night with LEDs on, nicely showing the ChemCam LIBS spots.”
“The initial analysis of this new sample by Chemin is ongoing, requiring repeated overnight integration to build up high-quality data,” says Herkenhoff.
The rover’s earth bound handlers also decided that one drill campaign into Kimberley was enough.
So the rover will not be drilling into any other rock targets here.
And it may be a very long time before the next drilling since the guiding team of scientists and engineers wants desperately to get on and arrive at the foothills of Mount Sharp as soon as possible.
But the robot will undoubtedly be busy with further analysis of the ‘Windjana’ sample along the way, since there’s plenty of leftover sample material stored in the CHIMRA sample processing mechanism to allow future delivery of samples when the rover periodically pauses during driving.
“Windjana” is named after a gorge in Western Australia.
It’s been a full year since the first two drill campaigns were conducted during 2013 at the ‘John Klein’ and ‘Cumberland’ outcrop targets inside Yellowknife Bay. They were both mudstone rock outcrops and the interiors were markedly different in color.
“The drill tailings from this rock are darker-toned and less red than we saw at the two previous drill sites,” said Jim Bell of Arizona State University, Tempe, deputy principal investigator for Curiosity’s Mast Camera (Mastcam).
“This suggests that the detailed chemical and mineral analysis that will be coming from Curiosity’s other instruments could reveal different materials than we’ve seen before. We can’t wait to find out!”
The science team chose Windjana for drilling “to analyze the cementing material that holds together sand-size grains in this sandstone,” says NASA.

Featured on APOD – Astronomy Picture of the Day on May 7, 2014
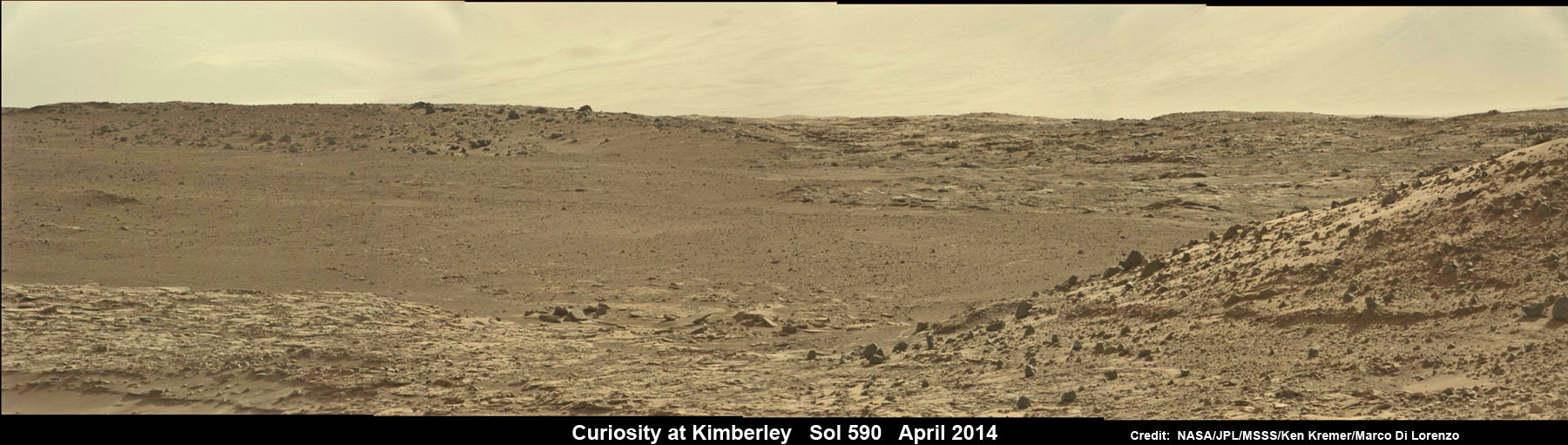
“The Kimberley Waypoint was selected because it has interesting, complex stratigraphy,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology, Pasadena, told me.
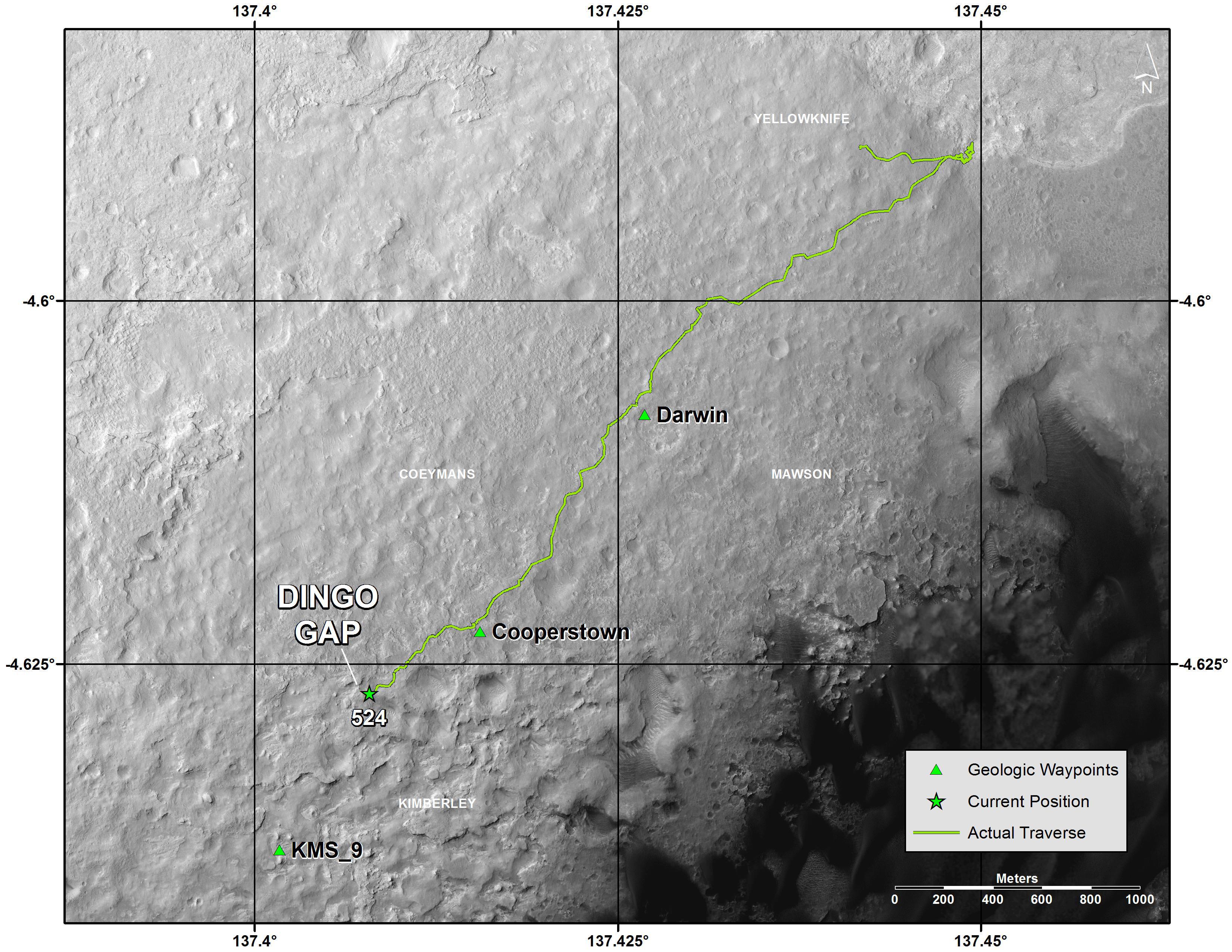
Curiosity departed the ancient lakebed at the Yellowknife Bay region in July 2013 where she discovered a habitable zone with the key chemical elements and a chemical energy source that could have supported microbial life billions of years ago – and thereby accomplished the primary goal of the mission.
Windjama lies some 2.5 miles (4 kilometers) southwest of Yellowknife Bay.
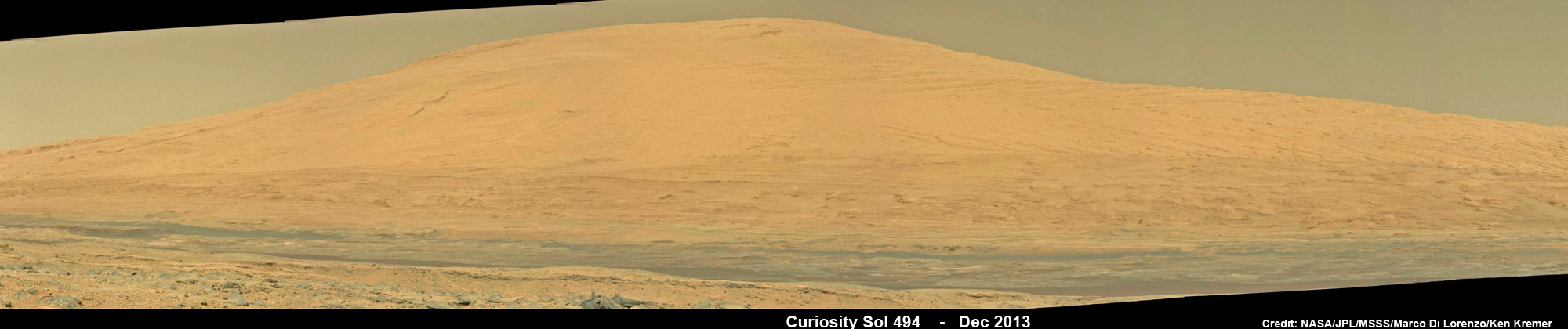
Curiosity still has about another 4 kilometers to go to reach the foothills of Mount Sharp sometime later this year.
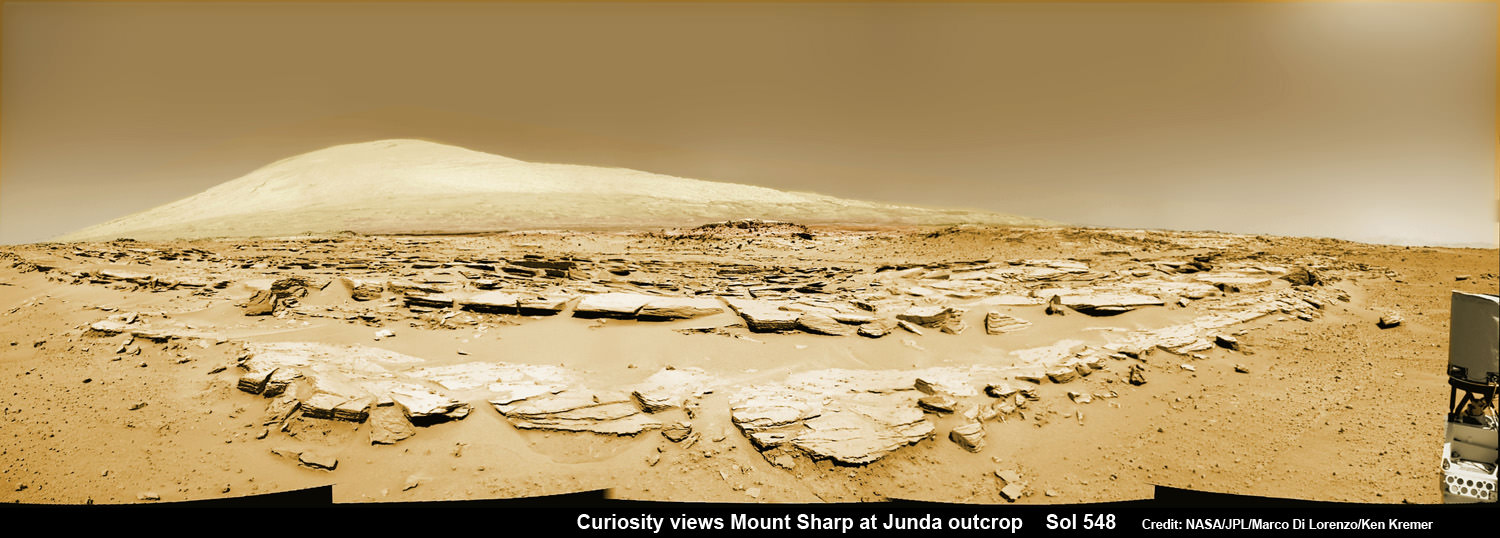
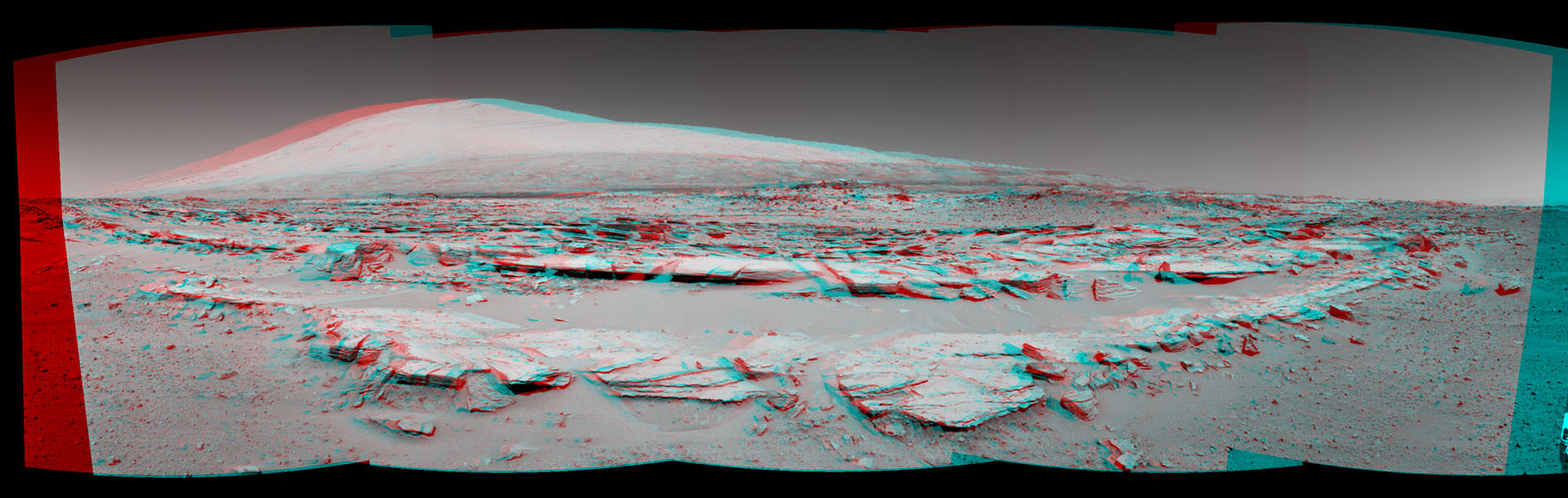
The sedimentary layers of Mount Sharp, which reaches 3.4 miles (5.5 km) into the Martian sky, is the six wheeled robots ultimate destination inside Gale Crater because it holds caches of water altered minerals. Such minerals could possibly indicate locations that sustained potential Martian life forms, past or present, if they ever existed.
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news.