This color view from NASA's Juno spacecraft is made from some of the first images taken by JunoCam after the spacecraft entered orbit around Jupiter on July 4, 2016. Credits: NASA/JPL-Caltech/SwRI/MSSS
This color view from NASA’s Juno spacecraft is made from some of the first images taken by JunoCam after the spacecraft entered orbit around Jupiter on July 4, 2016. Credits: NASA/JPL-Caltech/SwRI/MSSS
NASA’s newly arrived Jovian orbiter Juno has transmitted its first imagery since reaching orbit last week on July 4 after swooping over Jupiter’s cloud tops and powering back up its package of state-of-the-art science instruments for unprecedented research into determining the origin of our solar systems biggest planet.
The ‘Galilean’ moons are annotated from left to right in the lead image.
Juno’s visible-light camera named JunoCam was turned on six days after Juno fired its main engine to slow down and be captured into orbit around Jupiter – the ‘King of the Planets’ following a nearly five year long interplanetary voyage from Earth.
The image was taken when Juno was 2.7 million miles (4.3 million kilometers) distant from Jupiter on July 10, at 10:30 a.m. PDT (1:30 p.m. EDT, 5:30 UTC), and traveling on the outbound leg of its initial 53.5-day capture orbit.
Juno came within only about 3000 miles of the cloud tops and passed through Jupiter’s extremely intense and hazardous radiation belts during orbital arrival over the north pole.
Illustration of NASA’s Juno spacecraft firing its main engine to slow down and go into orbit around Jupiter. Lockheed Martin built the Juno spacecraft for NASA’s Jet Propulsion Laboratory. Credit: NASA/Lockheed Martin
The newly released JunoCam image is visible proof that Juno survived the do-or-die orbital fireworks on America’s Independence Day that placed the baskeball-court sized probe into orbit around Jupiter – and is in excellent health to carry out its groundbreaking mission to elucidate Jupiter’s ‘Genesis.’
“This scene from JunoCam indicates it survived its first pass through Jupiter’s extreme radiation environment without any degradation and is ready to take on Jupiter,” said Scott Bolton, principal investigator from the Southwest Research Institute in San Antonio, in a statement.
“We can’t wait to see the first view of Jupiter’s poles.”
Within two days of the nerve wracking and fully automated 35-minute-long Jupiter Orbital Insertion (JOI) maneuver, the Juno engineering team begun powering up five of the probes science instruments on July 6.
Animation of Juno 14-day orbits starting in late 2016. Credits: NASA/JPL-Caltech
All nonessential instruments and systems had been powered down in the final days of Juno’s approach to Jupiter to ensure the maximum chances for success of the critical JOI engine firing.
“We had to turn all our beautiful instruments off to help ensure a successful Jupiter orbit insertion on July 4,” said Bolton.
“But next time around we will have our eyes and ears open. You can expect us to release some information about our findings around September 1.”
Juno resumed high data rate communications with Earth on July 5, the day after achieving orbit.
We can expect to see more JunoCam images taken during this first orbital path around the massive planet.
But the first high resolution images are still weeks away and will not be available until late August on the inbound leg when the spacecraft returns and swoops barely above the clouds.
“JunoCam will continue to take images as we go around in this first orbit,” said Candy Hansen, Juno co-investigator from the Planetary Science Institute, Tucson, Arizona, in a statement.
“The first high-resolution images of the planet will be taken on August 27 when Juno makes its next close pass to Jupiter.”
All of JunoCams images will be released to the public.
During a 20 month long science mission – entailing 37 orbits lasting 14 days each – the probe will plunge to within about 2,600 miles (4,100 kilometers) of the turbulent cloud tops.
It will collect unparalleled new data that will unveil the hidden inner secrets of Jupiter’s origin and evolution as it peers “beneath the obscuring cloud cover of Jupiter and study its auroras to learn more about the planet’s origins, structure, atmosphere and magnetosphere.”
The solar powered Juno spacecraft approached Jupiter over its north pole, affording an unprecedented perspective on the Jovian system – “which looks like a mini solar system” – as it flew through the giant planets intense radiation belts in ‘autopilot’ mode.
Juno is the first solar powered probe to explore Jupiter or any outer planet.
In the final weeks of the approach JunoCam captured dramatic views of Jupiter and all four of the Galilean Moons moons — Io, Europa, Ganymede and Callisto.
At the post JOI briefing on July 5, these were combined into a spectacular JunoCam time-lapse movie released by Bolton and NASA.
Watch and be mesmerized -“for humanity, our first real glimpse of celestial harmonic motion” says Bolton.
Video caption: NASA’s Juno spacecraft captured a unique time-lapse movie of the Galilean satellites in motion about Jupiter. The movie begins on June 12th with Juno 10 million miles from Jupiter, and ends on June 29th, 3 million miles distant. The innermost moon is volcanic Io; next in line is the ice-crusted ocean world Europa, followed by massive Ganymede, and finally, heavily cratered Callisto. Galileo observed these moons to change position with respect to Jupiter over the course of a few nights. From this observation he realized that the moons were orbiting mighty Jupiter, a truth that forever changed humanity’s understanding of our place in the cosmos. Earth was not the center of the Universe. For the first time in history, we look upon these moons as they orbit Jupiter and share in Galileo’s revelation. This is the motion of nature’s harmony. Credits: NASA/JPL-Caltech/MSSS
The $1.1 Billion Juno was launched on Aug. 5, 2011 from Cape Canaveral, Florida atop the most powerful version of the Atlas V rocket augmented by 5 solid rocket boosters and built by United Launch Alliance (ULA). That same Atlas V 551 version just launched MUOS-5 for the US Navy on June 24.
The Juno spacecraft was built by prime contractor Lockheed Martin in Denver.
The mission will end in February 2018 with an intentional death dive into the atmosphere to prevent any possibility of a collision with Europa, one of Jupiter’s moons that is a potential abode for life.
The last NASA spacecraft to orbit Jupiter was Galileo in 1995. It explored the Jovian system until 2003.
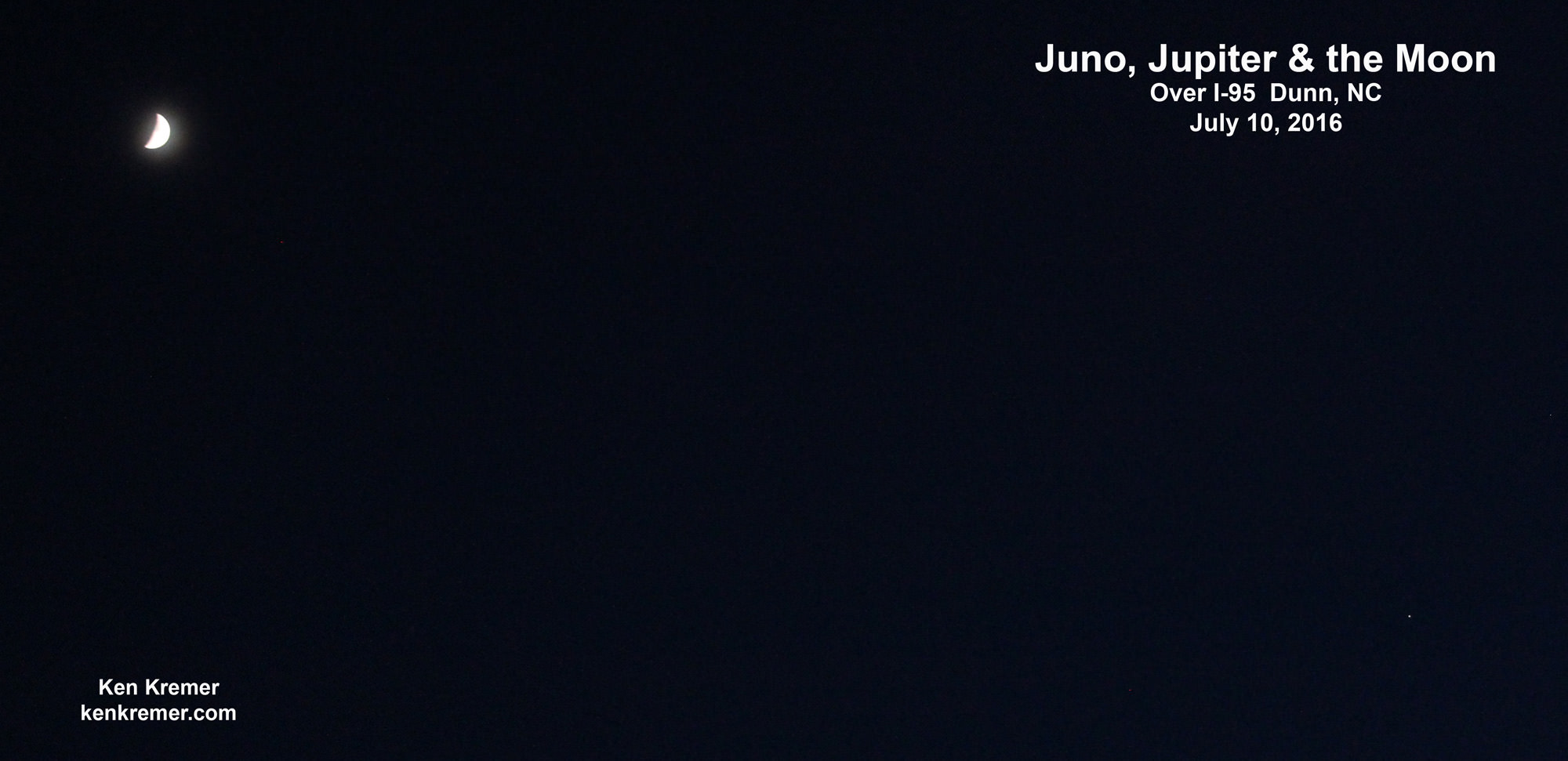
From Earth’s perspective, Jupiter was in conjunction with Earth’s Moon shortly after JOI during the first week in July.
Personally its thrilling to realize that an emissary from Earth is once again orbiting Jupiter after a 13 year long hiatus as seen in the authors image below – coincidentally taken the same day as JunoCam’s first image from orbit.
Juno, Jupiter and the Moon as seen from I-95 over Dunn, NC on July 10, 2016. Credit: Ken Kremer/kenkremer.com
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Learn more about Juno at Jupiter, SpaceX CRS-9 rocket launch, ISS, ULA Atlas and Delta rockets, Orbital ATK Cygnus, Boeing, Space Taxis, Mars rovers, Orion, SLS, Antares, NASA missions and more at Ken’s upcoming outreach events:
July 15-18: “SpaceX launches to ISS on CRS-9, Juno at Jupiter, ULA Delta 4 Heavy spy satellite, SLS, Orion, Commercial crew, Curiosity explores Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
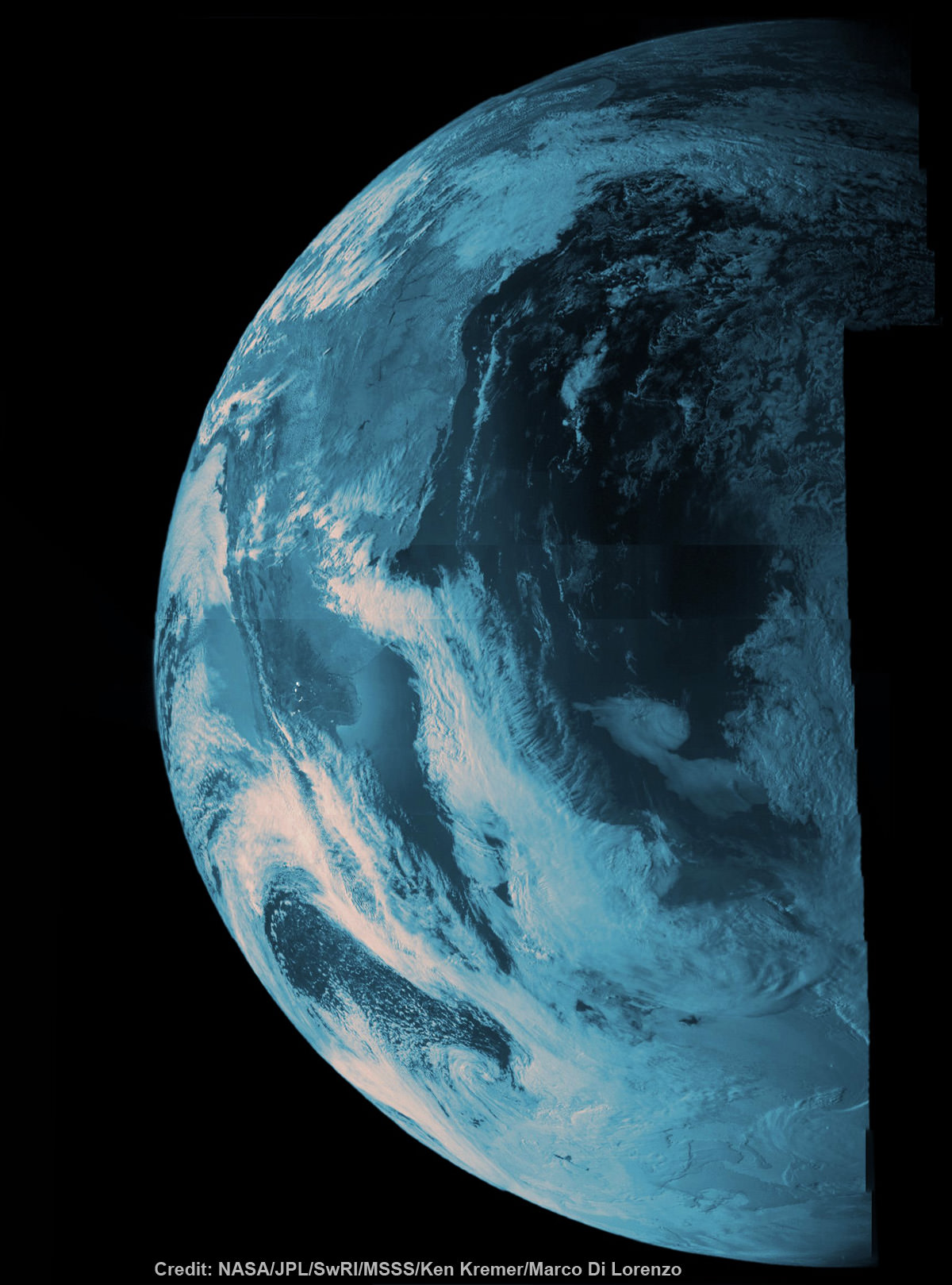
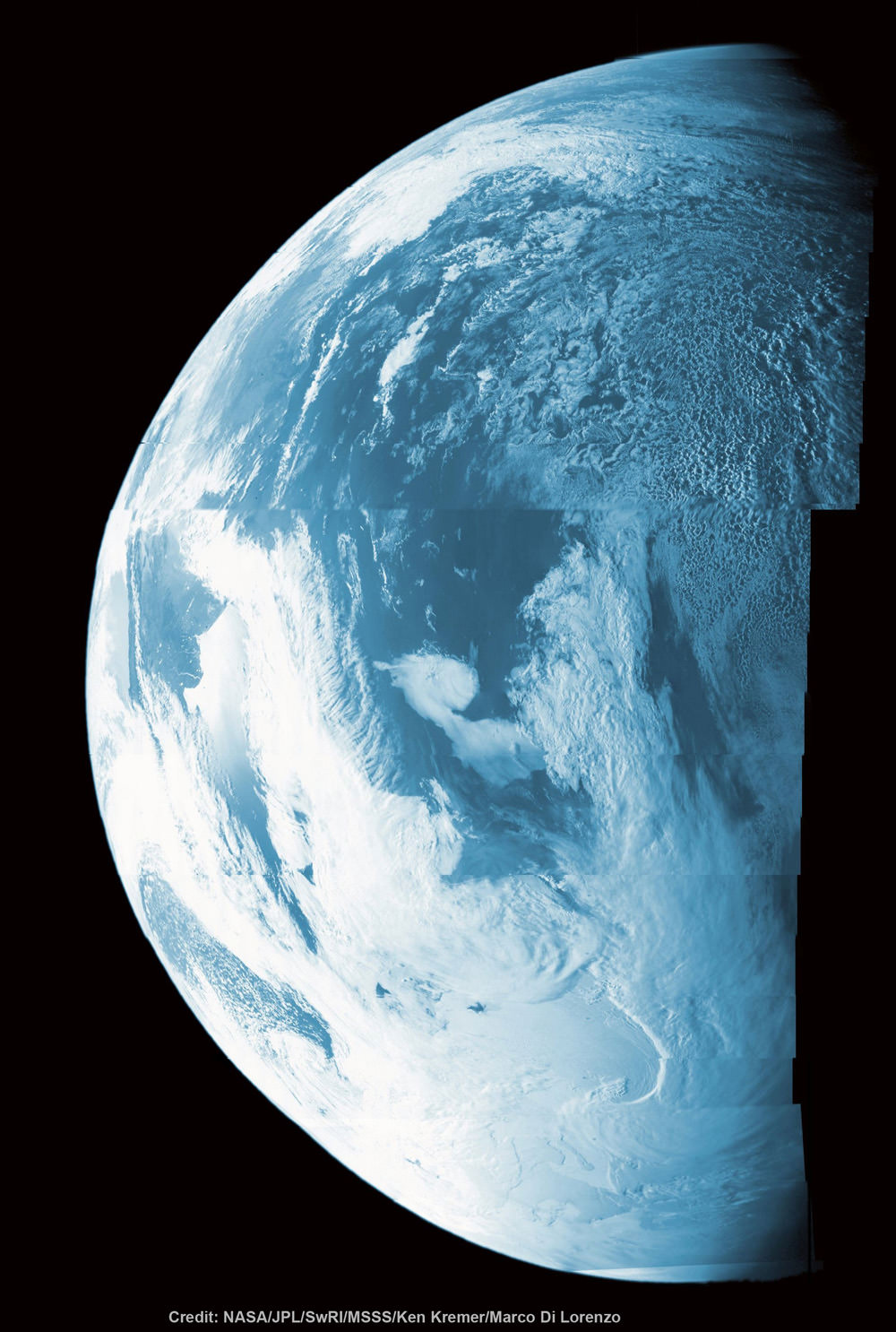
NASA’s Juno probe captured the image data for this composite picture during its Earth flyby on Oct. 9 over Argentina, South America and the southern Atlantic Ocean. Raw imagery was reconstructed and aligned by Ken Kremer and Marco Di Lorenzo, and false-color blue has been added to the view taken by a near-infrared filter that is typically used to detect methane. Credit: NASA/JPL/SwRI/MSSS/Ken Kremer/Marco Di Lorenzo
Illustration of NASA's Juno spacecraft firing its main engine to slow down and go into orbit around Jupiter. Lockheed Martin built the Juno spacecraft for NASA's Jet Propulsion Laboratory. Credit: NASA/Lockheed Martin
Illustration of NASA’s Juno spacecraft firing its main engine to slow down and go into orbit around Jupiter. Lockheed Martin built the Juno spacecraft for NASA’s Jet Propulsion Laboratory. Credit: NASA/Lockheed Martin
“NASA did it again!” pronounced an elated Scott Bolton, investigator of Juno from Southwest Research Institute in San Antonio, to loud cheers and applause from the overflow crowd of mission scientists and media gathered at the post orbit media briefing at NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, Calif.
After a nearly five year journey covering 1.7-billion-miles (2.8-billion-kilometers) across our solar system, NASA’s basketball court-sized Juno orbiter achieved orbit around Jupiter, the ‘King of the Planets’ late Monday night, July 4, in a gift to all Americans on our 240th Independence Day and a gift to science to elucidate our origins.
“We are in orbit and now the fun begins, the science,” said Bolton at the briefing. “We just did the hardest thing NASA’s ever done! That’s my claim. I am so happy … and proud of this team.”
And the science is all about peering far beneath the well known banded cloud tops for the first time to investigate Jupiter’s deep interior with a suite of nine instruments, and discover the mysteries of its genesis and evolution and the implications for how we came to be.
“The deep interior of Jupiter is nearly unknown. That’s what we are trying to learn about. The origin of us.”
Solar powered Juno successfully entered a polar elliptical orbit around Jupiter after completing a must-do 35-minute-long firing of the main engine known as Jupiter Orbital Insertion or JOI.
The spacecraft approached Jupiter over its north pole, affording an unprecedented perspective on the Jovian system – “which looks like a mini solar system” – as it flew through the giant planets intense radiation belts in ‘autopilot’ mode.
“The mission team did great. The spacecraft did great. We are looking great. It’s a great day,” Bolton gushes.
Engineers tracking the telemetry received confirmation that the JOI burn was completed as planned at 8:53 p.m. PDT (11:53 p.m. EDT) Monday, July 4.
Juno is only the second probe from Earth to orbit Jupiter and the first solar powered probe to the outer planets. The gas giant is two and a half times more massive than all of the other planets combined.
“Independence Day always is something to celebrate, but today we can add to America’s birthday another reason to cheer — Juno is at Jupiter,” said NASA administrator Charlie Bolden in a statement.
“And what is more American than a NASA mission going boldly where no spacecraft has gone before? With Juno, we will investigate the unknowns of Jupiter’s massive radiation belts to delve deep into not only the planet’s interior, but into how Jupiter was born and how our entire solar system evolved.”
Artists concept NASA’s Juno spacecraft firing its main engine to slow down and go into orbit around Jupiter on July 4, 2016 nearly five years after launch. Credit: NASA
The do-or-die burn of Juno’s 645-Newton Leros-1b main engine started at 8:18 p.m. PDT (11:18 p.m. EDT), which had the effect of decreasing the spacecraft’s velocity by 1,212 miles per hour (542 meters per second) and allowing Juno to be captured in orbit around Jupiter. There were no second chances.
All of the science instruments were turned off on June 30 to keep the focus on the nail-biting insertion maneuver and preserve battery power, said Bolton.
“So tonight through tones Juno sang to us. And it was a song of perfection. After a 1.7 billion mile journey we hit tour burn targets within one second,” Rick Nybakken, Juno project manager from JPL, gleefully reported at the briefing.
“That’s how good our team is! And that’s how well our Juno spacecraft performed tonight.”
To accomplish the burn, the spacecraft first had to adjust it’s attitude to point the engine in the required direction to slow the spacecraft and then simultaneously also had the effect that the life giving solar panels were pointing away from the sun. It the only time during the entire mission at Jupiter that the solar panels were in darkness and not producing energy.
The spacecraft’s rotation rate was also spun up from 2 to 5 revolutions per minute (RPM) to help stabilize it during JOI. Juno is spin stabilized to maintain pointing.
After the burn was complete, Juno was spun down and adjusted to point to the sun before it ran out of battery power.
We have to get the blood flowing through Juno’s veins, Bolton emphasized.
It is equipped with 18,698 individual solar cells over 60 square meters of surface on the solar arrays to provide energy. Juno is spinning like a windmill through space with its 3 giant solar arrays. It is about 540 million miles (869 million kilometers) from Earth.
Juno mission briefing on July 5, 2016 at JPL after the successful JOI orbit insertion on July 4. Credit: Roland Keller/rkeusa.blogspot.com
Signals traveling at the speed of light take 48 minutes to reach Earth, said Nybakken.
So the main engine burn, which was fully automated, was already over for some 13 minutes before the first indications of the outcome reach Earth via a series of Doppler signals and tones.
“Tonight, 540 million miles away, Juno performed a precisely choreographed dance at blazing speeds with the largest, most intense planet in our solar system,” said Guy Beutelschies, director of Interplanetary Missions at Lockheed Martin Space Systems.
“Since launch, Juno has operated exceptionally well, and the flawless orbit insertion is a testament to everyone working on Juno and their focus on getting this amazing spacecraft to its destination. NASA now has a science laboratory orbiting Jupiter.”
“The spacecraft is now pointed back at the sun and the antenna back at Earth. The spacecraft performed well and did everything it needed to do,” he reported at the briefing.
“We are looking forward to getting all that science data to Scott and the team.”
“Juno is also the farthest mission to rely on solar power. And although they provide only 1/25th the power at Earth, they still provide over 500 watts of power at Jupiter,” said Nybakken.
Initially the spacecraft enters a long, looping polar orbit lasting about 53 days. That highly elliptical orbit will be trimmed to 14 days for the regular science orbits.
The orbits are designed to minimize contact with Jupiter’s extremely intense radiation belts. The nine science instruments are shielded inside a ½ thick vault built of Titanium to protect them from the utterly deadly radiation of some 20,000,000 rads.
During a 20 month long science mission – entailing 37 orbits lasting 14 days each – the probe will plunge to within about 3000 miles of the turbulent cloud tops and collect unprecedented new data that will unveil the hidden inner secrets of Jupiter’s origin and evolution.
But the length and number of the science orbits has changed since the mission was launched almost 5 years ago in 2011.
Originally Juno was planned to last about one year with an orbital profile involving 33 orbits of 11 days each.
I asked the team to explain the details of how and why the change from 11 to 14 days orbits and increasing the total number of orbits to 37 from 33, especially in light of the extremely harsh radiation hazards?
“The original plan of 33 orbits of 11 days was an example but there were other periods that would work,” Bolton told Universe Today.
“What we really cared about was dropping down over the poles and capturing each longitude, and laying a map or net around Jupiter.”
“Also, during the Earth flyby we went into safe mode. And as we looked at that it was a hiccup by the spacecraft but it actually behaved as it should have.”
“So we said well if that happened at Jupiter we would like to be able to recover and not lose an orbit. So we started to look at the timeline of how long it took to recover, and did we want to add a couple of days to the orbit for conservatism – to ensure the science mission.”
“So it made sense to add 3 days. It didn’t change the science and it made the probability of success even greater. So that was the basis of the change.”
“We also evaluated the radiation. And it wasn’t much different. Juno is designed to take data at a very low risk. The radiation slowly accumulates at the start. As you get to the later part of the mission, it gets a faster and faster accumulation.”
“So we still retained that conservatism as well and the overall radiation dose was pretty much the same,” Bolton explained.
“The radiation we accumulate is not just the more time you spend the more radiation,” Steve Levin, Juno Project Scientist at JPL, told Universe Today.
“Each time we come in close to the planet we get a dose of radiation. Then the spacecraft is out far from Jupiter and is relatively free from that radiation until we come in close again.”
“So just changing from 11 to 14 day orbits does not mean we get more radiation because you are there longer.”
“It’s really the number of times we come in close to Jupiter that determines how much radiation we are getting.”
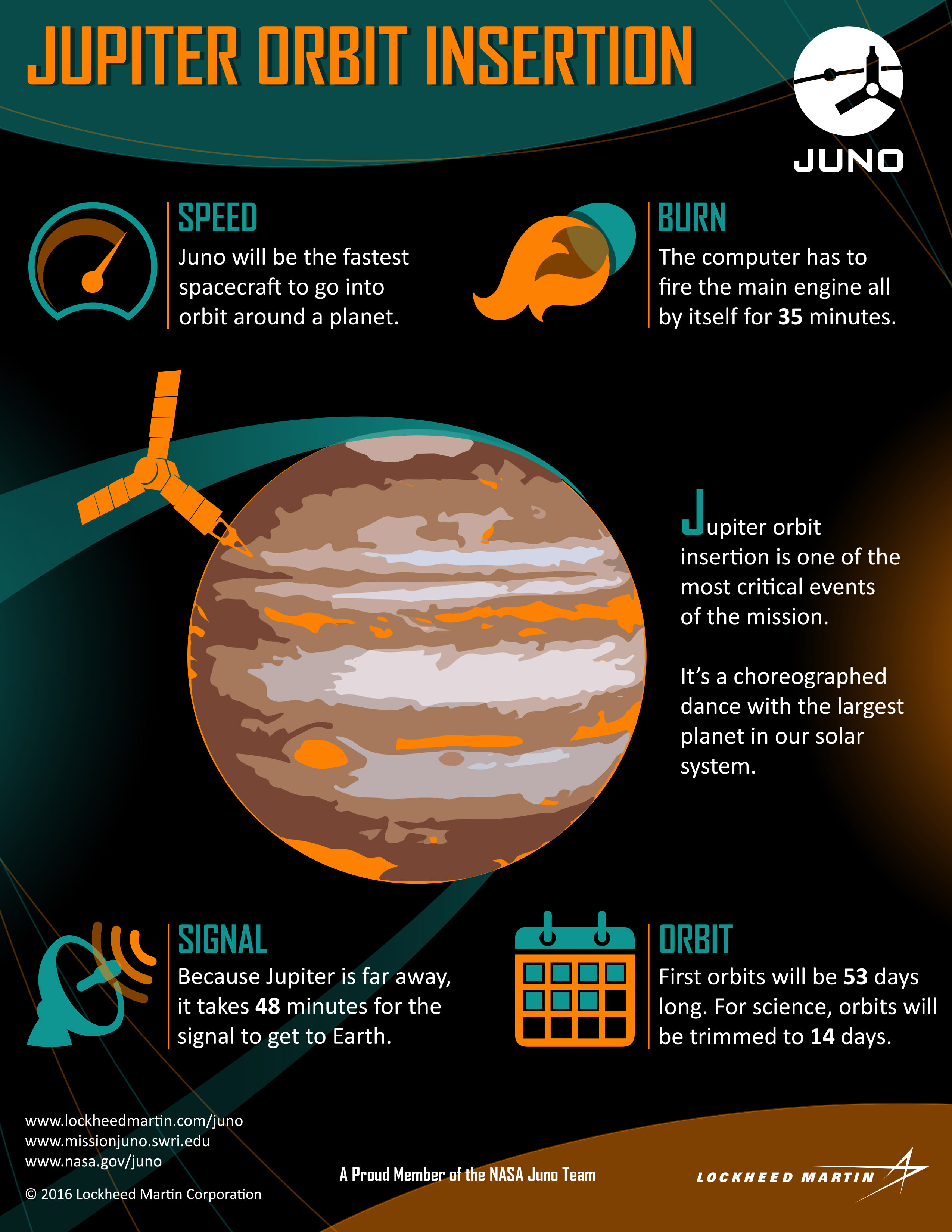
Juno is the fastest spacecraft ever to arrive at Jupiter and was moving at over 165,000 mph relative to Earth and 130,000 mph relative to Jupiter at the moment of JOI.
Juno’s principal goal is to understand the origin and evolution of Jupiter.
“With its suite of nine science instruments, Juno will investigate the existence of a solid planetary core, map Jupiter’s intense magnetic field, measure the amount of water and ammonia in the deep atmosphere, and observe the planet’s auroras. The mission also will let us take a giant step forward in our understanding of how giant planets form and the role these titans played in putting together the rest of the solar system. As our primary example of a giant planet, Jupiter also can provide critical knowledge for understanding the planetary systems being discovered around other stars,” according to a NASA description.
The $1.1 Billion Juno was launched on Aug. 5, 2011 from Cape Canaveral, Florida atop the most powerful version of the Atlas V rocket augmented by 5 solid rocket boosters and built by United Launch Alliance (ULA). That same Atlas V 551 version just launched MUOS-5 for the US Navy on June 24.
The Juno spacecraft was built by prime contractor Lockheed Martin in Denver.
United Launch Alliance Atlas V liftoff with NASA’s Juno to Jupiter orbiter on Aug. 5, 2011 from Cape Canaveral Air Force Station, Florida. Credit: Ken Kremer/kenkremer.com
The last NASA spacecraft to orbit Jupiter was Galileo in 1995. It explored the Jovian system until 2003.
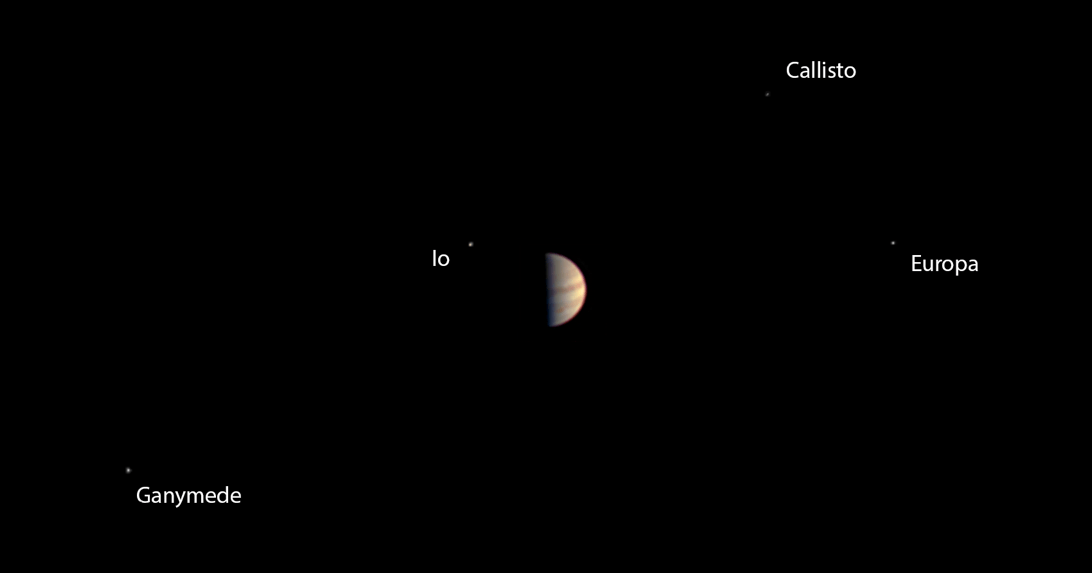
Bolton also released new views of Jupiter taken by JunoCam – the on board public outreach camera that snapped a final gorgeous view of the Jovian system showing Jupiter and its four largest moons, dancing around the largest planet in our solar system.
The newly released color image was taken on June 29, 2016, at a distance of 3.3 million miles (5.3 million kilometers) from Jupiter – just before the probe went into autopilot mode.
This is the final view taken by the JunoCam instrument on NASA’s Juno spacecraft before Juno’s instruments were powered down in preparation for orbit insertion. Juno obtained this color view on June 29, 2016, at a distance of 3.3 million miles (5.3 million kilometers) from Jupiter. See timelapse movie below. Credits: NASA/JPL-Caltech/MSSS
It shows a dramatic view of the clouds bands of Jupiter, dominating a spectacular scene that includes the giant planet’s four largest moons — Io, Europa, Ganymede and Callisto.
Scott Bolton and NASA also released this spectacular new time-lapse JunoCam movie at today’s briefing showing Juno’s approach to Jupiter and the Galilean Moons.
Watch and be mesmerized -“for humanity, our first real glimpse of celestial harmonic motion” says Bolton.
Video caption: NASA’s Juno spacecraft captured a unique time-lapse movie of the Galilean satellites in motion about Jupiter. The movie begins on June 12th with Juno 10 million miles from Jupiter, and ends on June 29th, 3 million miles distant. The innermost moon is volcanic Io; next in line is the ice-crusted ocean world Europa, followed by massive Ganymede, and finally, heavily cratered Callisto. Galileo observed these moons change position with respect to Jupiter over the course of a few nights. From this observation he realized that the moons were orbiting mighty Jupiter, a truth that forever changed humanity’s understanding of our place in the cosmos. Earth was not the center of the Universe. For the first time in history, we look upon these moons as they orbit Jupiter and share in Galileo’s revelation. This is the motion of nature’s harmony. Credits: NASA/JPL-Caltech/MSSS
Along the 5 year journey to Jupiter, Juno made a return trip to Earth on Oct. 9, 2013 for a flyby gravity assist speed boost that enabled the trek to the Jovian system.
During the Earth flyby (EFB), the science team observed Earth using most of Juno’s nine science instruments including, JunoCam, since the slingshot also served as an important dress rehearsal and key test of the spacecraft’s instruments, systems and flight operations teams.
The JunoCam images will be made publicly available to see and process.
During the Earth flyby, Junocam snapped some striking images of Earth as it sped over Argentina, South America and the South Atlantic Ocean and came within 347 miles (560 kilometers) of the surface.
For example a dazzling portrait of our Home Planet high over the South American coastline and the Atlantic Ocean gives a hint of what’s to come from Jupiter’s cloud tops. See our colorized Junocam mosaic of land, sea and swirling clouds, created by Ken Kremer and Marco Di Lorenzo
This colorized composite shows more than half of Earth’s disk over the coast of Argentina and the South Atlantic Ocean as the Juno probe slingshotted by on Oct. 9, 2013 for a gravity assisted acceleration to Jupiter. The mosaic was assembled from raw images taken by the Junocam imager. Credit: NASA/JPL/SwRI/MSSS/Ken Kremer/Marco Di Lorenzo
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Rick Nybakken, Juno project manager at JPL illustrates how Juno will enter orbit around Jupiter during Juno mission briefing on July 4, 2016 at JPL. Credit: Roland Keller/rkeusa.blogspot.com
This is the final view taken by the JunoCam instrument on NASA's Juno spacecraft before Juno's instruments were powered down in preparation for orbit insertion. Juno obtained this color view on June 29, 2016, at a distance of 3.3 million miles (5.3 million kilometers) from Jupiter. See timelapse movie below. Credits: NASA/JPL-Caltech/MSSS
This is the final view taken by the JunoCam instrument on NASA’s Juno spacecraft before Juno’s instruments were powered down in preparation for orbit insertion. Juno obtained this color view on June 29, 2016, at a distance of 3.3 million miles (5.3 million kilometers) from Jupiter. See timelapse movie below. Credits: NASA/JPL-Caltech/MSSS
After a nearly 5 year odyssey across the solar system, NASA’s solar powered Juno orbiter is all set to ignite its main engine late tonight and set off a powerful charge of do-or-die fireworks on America’s ‘Independence Day’ required to place the probe into orbit around Jupiter – the ‘King of the Planets.’
To achieve orbit, Juno must will perform a suspenseful maneuver known as ‘Jupiter Orbit Insertion’ or JOI tonight, Monday, July 4, upon which the entire mission and its fundamental science hinges. There are no second chances!
You can be part of all the excitement and tension building up to and during that moment, which is just hours away – and experience the ‘Joy of JOI’ by tuning into NASA TV tonight!
Watch the live webcast on NASA TV featuring the top scientists and NASA officials starting at 10:30 p.m. EDT (7:30 p.m. PST, 0230 GMT) – direct from NASA’s Jet Propulsion Laboratory: https://www.nasa.gov/nasatv
Illustration of NASA’s Juno spacecraft firing its main engine to slow down and go into orbit around Jupiter. Lockheed Martin built the Juno spacecraft for NASA’s Jet Propulsion Laboratory. Credit: NASA/Lockheed Martin
And for a breathtaking warm-up act, Juno’s on board public outreachJunoCam camera snapped a final gorgeous view of the Jovian system showing Jupiter and its four largest moons, dancing around the largest planet in our solar system.
The newly released color image was taken on June 29, 2016, at a distance of 3.3 million miles (5.3 million kilometers) from Jupiter – just before the probe went into autopilot mode.
It shows a dramatic view of the clouds bands of Jupiter, dominating a spectacular scene that includes the giant planet’s four largest moons — Io, Europa, Ganymede and Callisto.
NASA also released this new time-lapse JunoCam movie today:
Video caption: Juno’s Approach to Jupiter: After nearly five years traveling through space to its destination, NASA’s Juno spacecraft will arrive in orbit around Jupiter on July 4, 2016. This video shows a peek of what the spacecraft saw as it closed in on its destination. Credits: NASA/JPL-Caltech/MSSS
The spacecraft is approaching Jupiter over its north pole, affording an unprecedented perspective on the Jovian system – “which looks like a mini solar system,” said Juno Principal Investigator and chief scientist Scott Bolton, from the Southwest Research Institute (SwRI) in San Antonio, Tx, at today’s media briefing at NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, Calif.
“The deep interior of Jupiter is nearly unknown. That’s what we are trying to learn about.”
The 35-minute-long main engine burn is preprogrammed to start at 11:18 p.m. EDT (8:18 p.m. PST, 0318 GMT). It is scheduled to last until approximately 11:53 p.m. (8:53 p.m. PST, 0353 GMT).
Juno mission briefing July 4, 2016 at JPL by Jim Green, Scott Bolton, Rick Nybakken and Heidi Becker. Credit: Roland Keller/rkeusa.blogspot.com
All of the science instruments were turned off on June 30 to keep the focus on the nail-biting insertion maneuver and preserve battery power, said Bolton. Solar powered Juno is pointed away from the sun during the engine firing.
JOI is required to slow the spacecraft so it can be captured into the gas giant’s orbit as it closes in over the north pole.
Initially the spacecraft will enter a long, looping polar orbit lasting about 53 days. That highly elliptical orbit will quickly be trimmed to 14 days for the science orbits.
The orbits are designed to minimize contact with Jupiter’s extremely intense radiation belts. The science instruments are shielded inside a ½ thick vault built of Titanium to protect them from the utterly deadly radiation – of some 20,000,000 rads.
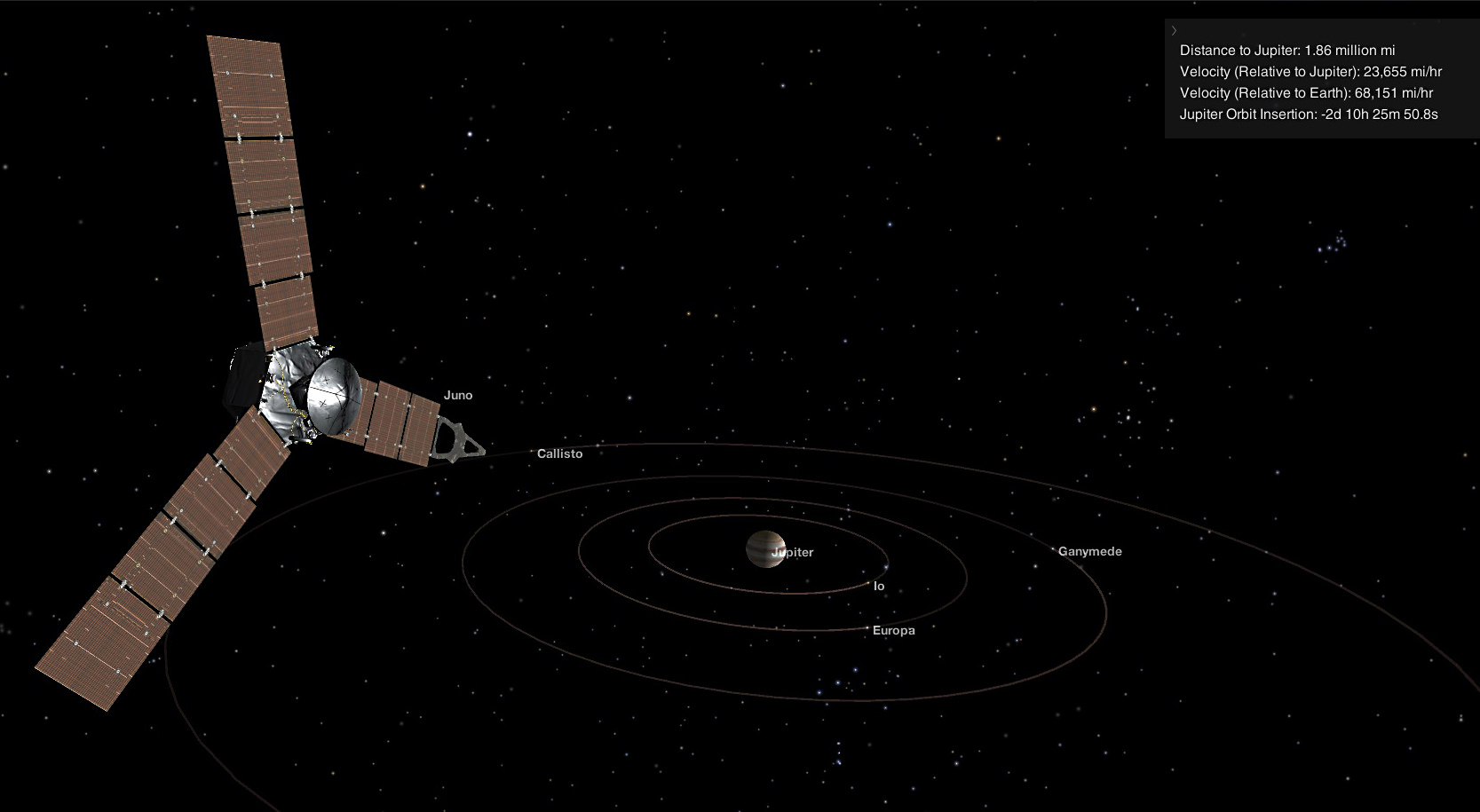
Artist’s concept of NASA’s Juno spacecraft crossing the orbits of Jupiter’s four largest moons — Callisto, Gaynmede, Europa and Io — on its approach to Jupiter. Credits: NASA/JPL-Caltech
Juno is the fastest spacecraft ever to arrive at Jupiter and is moving at over 165,000 mph relative to Earth and 130,000 mph relative to Jupiter.
After a five-year and 2.8 Billion kilometer (1.7 Billion mile) outbound trek to the Jovian system and the largest planet in our solar system and an intervening Earth flyby speed boost, the moment of truth for Juno is now inexorably at hand.
Signals traveling at the speed of light take 48 minutes to reach Earth, said Rick Nybakken, Juno project manager from NASA’s Jet Propulsion Laboratory, at the media briefing.
So the main engine burn, which is fully automated, will already be over for some 13 minutes before the first indications of the outcome reach Earth via a series of Doppler shifts and tones. It is about 540 million miles (869 million kilometers) from Earth.
“By the time the burn is complete, we won’t even hear about it until 13 minutes later.”
“The engine burn will slow Juno by 542 meters/second (1,212 mph) and is fully automated as it approaches over Jupiter’s North Pole,” explained Nybakken.
“The long five year cruise enabled us to really learn about the spacecraft and how it operates.”
As it travels through space, the basketball court sized Juno is spinning like a windmill with its 3 giant solar arrays.
“Juno is also the farthest mission to rely on solar power. The solar panels are 60 square meters in size. And although they provide only 1/25th the power at Earth, they still provide over 500 watts of power at Jupiter.”
Rick Nybakken, Juno project manager at JPL illustrates how Juno will enter orbit around Jupiter during Juno mission briefing on July 4, 2016 at JPL. Credit: Roland Keller/rkeusa.blogspot.com
The protective cover that shields Juno’s main engine from micrometeorites and interstellar dust was opened on June 20.
During a 20 month long science mission – entailing 37 orbits lasting 14 days each – the probe will plunge to within about 3000 miles of the turbulent cloud tops and collect unprecedented new data that will unveil the hidden inner secrets of Jupiter’s origin and evolution.
“Jupiter is the Rosetta Stone of our solar system,” says Bolton. “It is by far the oldest planet, contains more material than all the other planets, asteroids and comets combined and carries deep inside it the story of not only the solar system but of us. Juno is going there as our emissary — to interpret what Jupiter has to say.”
During the orbits, Juno will probe beneath the obscuring cloud cover of Jupiter and study its auroras to learn more about the planet’s origins, structure, atmosphere and magnetosphere.
The $1.1 Billion Juno was launched on Aug. 5, 2011 from Cape Canaveral, Florida atop the most powerful version of the Atlas V rocket augmented by 5 solid rocket boosters and built by United Launch Alliance (ULA). That same Atlas V 551 version just launched MUOS-5 for the US Navy on June 24.
The Juno spacecraft was built by prime contractor Lockheed Martin in Denver.
Juno soars skyward to Jupiter on Aug. 5, 2011 from launch pad 41 at Cape Canaveral Air Force Station at 12:25 p.m. EDT. View from the VAB roof. Credit: Ken Kremer/kenkremer.com
Along the way Juno made a return trip to Earth on Oct. 9, 2013 for a flyby gravity assist speed boost that enabled the trek to Jupiter.
The flyby provided 70% of the velocity compared to the Atlas V launch, said Nybakken.
During the Earth flyby (EFB), the science team observed Earth using most of Juno’s nine science instruments since the slingshot also serves as an important dress rehearsal and key test of the spacecraft’s instruments, systems and flight operations teams.
What lessons were learned from the safe mode event and applied to JOI, I asked?
“We had the battery at 50% state of charge during the EFB and didn’t accurately predict the sag on the battery when we went into eclipse. We now have a validated high fidelity power model which would have predicted that sag and we would have increased the battery voltage,” Nybakken told Universe Today
“It will not happen at JOI as we don’t go into eclipse and are at 100% SOC. Plus the instruments are off which increases our power margins.”
For example the dazzling portrait of our Home Planet high over the South American coastline and the Atlantic Ocean.
For a hint of what’s to come, see our colorized Junocam mosaic of land, sea and swirling clouds, created by Ken Kremer and Marco Di Lorenzo
NASA’s Juno probe captured the image data for this composite picture during its Earth flyby on Oct. 9 over Argentina, South America and the southern Atlantic Ocean. Raw imagery was reconstructed and aligned by Ken Kremer and Marco Di Lorenzo, and false-color blue has been added to the view taken by a near-infrared filter that is typically used to detect methane. Credit: NASA/JPL/SwRI/MSSS/Ken Kremer/Marco Di Lorenzo
The last NASA spacecraft to orbit Jupiter was Galileo in 1995. It explored the Jovian system until 2003.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
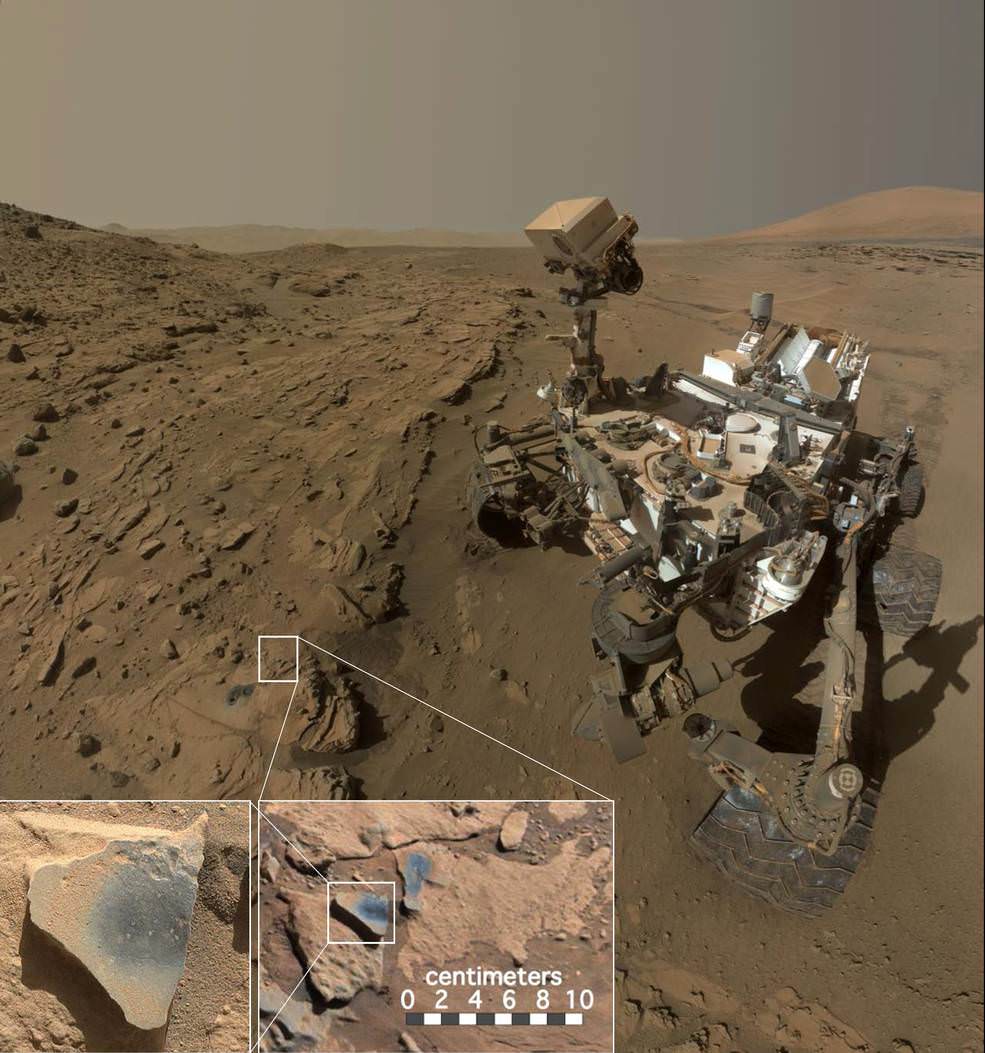
This scene shows NASA's Curiosity Mars rover at a location called "Windjana," where the rover found rocks containing manganese-oxide minerals, which require abundant water and strongly oxidizing conditions to form. Credits: NASA/JPL-Caltech/MSSS
This scene shows NASA’s Curiosity Mars rover at a location called “Windjana,” where the rover found rocks containing manganese-oxide minerals, which require abundant water and strongly oxidizing conditions to form. Credits: NASA/JPL-Caltech/MSSS
New chemical science findings from NASA’s Mars rover Curiosity indicate that ancient Mars likely had a higher abundance of molecular oxygen in its atmosphere compared to the present day and was thus more hospitable to life forms, if they ever existed.
Thus the Red Planet was much more Earth-like and potentially habitable billions of years ago compared to the cold, barren place we see today.
Manganese-oxide minerals require abundant water and strongly oxidizing conditions to form.
“Researchers found high levels of manganese oxides by using a laser-firing instrument on the rover. This hint of more oxygen in Mars’ early atmosphere adds to other Curiosity findings — such as evidence about ancient lakes — revealing how Earth-like our neighboring planet once was,” NASA reported.
The newly announced results stem from results obtained from the rovers mast mounted ChemCam or Chemistry and Camera laser firing instrument. ChemCam operates by firing laser pulses and then observes the spectrum of resulting flashes of plasma to assess targets’ chemical makeup.
“The only ways on Earth that we know how to make these manganese materials involve atmospheric oxygen or microbes,” said Nina Lanza, a planetary scientist at Los Alamos National Laboratory in New Mexico, in a statement.
“Now we’re seeing manganese oxides on Mars, and we’re wondering how the heck these could have formed?”
The discovery is being published in a new paper in the American Geophysical Union’s Geophysical Research Letters. Lanza is the lead author.
The manganese oxides were found by ChemCam in mineral veins investigated at “Windjana” and are part of geologic timeline being assembled from Curiosity’s research expedition across of the floor of the Gale Crater landing site.
Scientists have been able to link the new finding of a higher oxygen level to a time when groundwater was present inside Gale Crater.
“These high manganese materials can’t form without lots of liquid water and strongly oxidizing conditions,” says Lanza.
“Here on Earth, we had lots of water but no widespread deposits of manganese oxides until after the oxygen levels in our atmosphere rose.”
The high-manganese materials were found in mineral-filled cracks in sandstones in the “Kimberley” region of the crater.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo. Featured on APOD – Astronomy Picture of the Day on May 7, 2014
High concentrations of manganese oxide minerals in Earth’s ancient past correspond to a major shift in our atmosphere’s composition from low to high oxygen atmospheric concentrations. Thus its reasonable to suggest the same thing happened on ancient Mars.
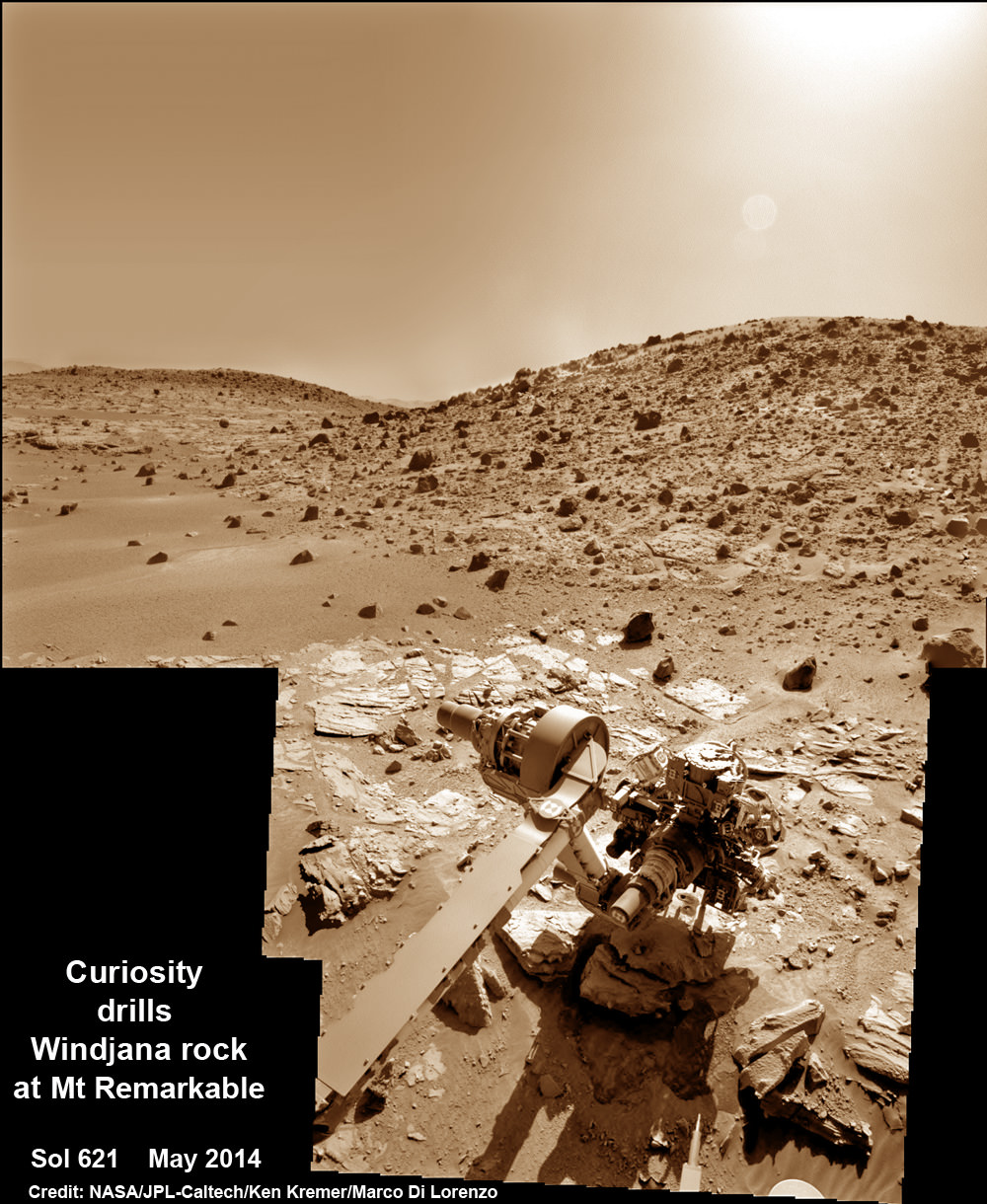
As part of the investigation, Curiosity also conducted a drill campaign at Windjana, her 3rd of the mission.
Composite photo mosaic shows deployment of NASA Curiosity rovers robotic arm and two holes after drilling into ‘Windjana’ sandstone rock on May 5, 2014, Sol 621, at Mount Remarkable as missions third drill target for sample analysis by rover’s chemistry labs. The navcam raw images were stitched together from several Martian days up to Sol 621, May 5, 2014 and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
How much manganese oxide was detected and what is the meaning?
“The Curiosity rover observed high-Mn abundances (>25 wt% MnO) in fracture-filling materials that crosscut sandstones in the Kimberley region of Gale crater, Mars,” according to the AGU paper.
“On Earth, environments that concentrate Mn and deposit Mn minerals require water and highly oxidizing conditions, hence these findings suggest that similar processes occurred on Mars.”
“Based on the strong association between Mn-oxide deposition and evolving atmospheric dioxygen levels on Earth, the presence of these Mn-phases on Mars suggests that there was more abundant molecular oxygen within the atmosphere and some groundwaters of ancient Mars than in the present day.”
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
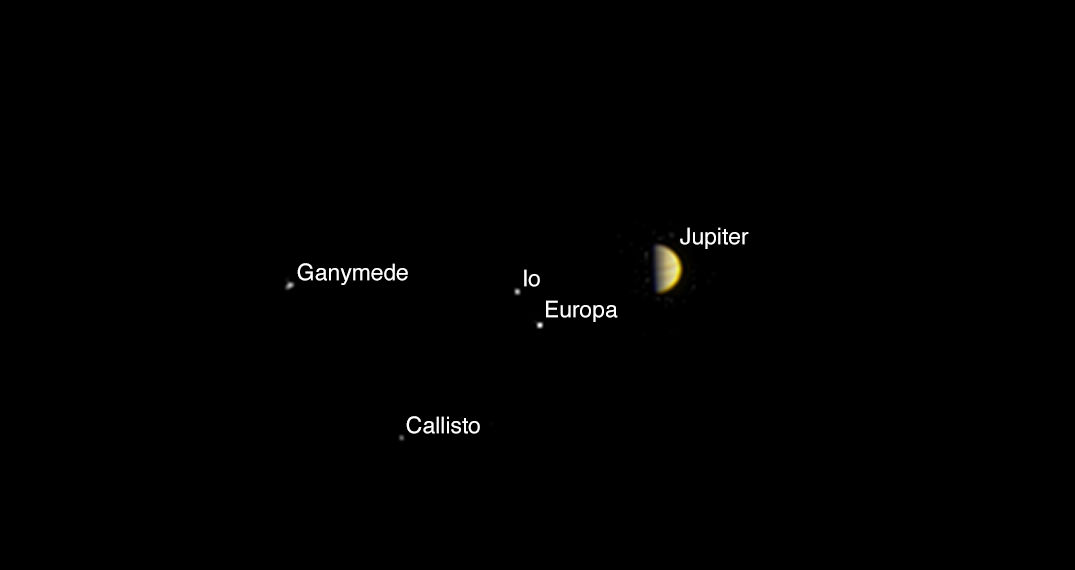
This annotated color view of Jupiter and its four largest moons -- Io, Europa, Ganymede and Callisto -- was taken by the JunoCam camera on NASA's Juno spacecraft on June 21, 2016, at a distance of 6.8 million miles (10.9 million kilometers) from Jupiter. Image credit: NASA/JPL-Caltech/MSSS
This annotated color view of Jupiter and its four largest moons — Io, Europa, Ganymede and Callisto — was taken by the JunoCam camera on NASA’s Juno spacecraft on June 21, 2016, at a distance of 6.8 million miles (10.9 million kilometers) from Jupiter. Image credit: NASA/JPL-Caltech/MSSS
Now just 7 days out from a critical orbital insertion burn, NASA’s Jupiter-boundJuno orbiter is closing in fast on the massive gas giant. And as its coming into focus the spacecraft has begun snapping a series of beautiful images of the biggest planet and its biggest moons.
In a newly released color image snapped by the probes educational public outreach camera named Junocam, banded Jupiter dominates a spectacular scene that includes the giant planet’s four largest moons — Io, Europa, Ganymede and Callisto.
Junocam’s image of the approaching Jovian system was taken on June 21, 2016, at a distance of 6.8 million miles (10.9 million kilometers) and hints at the multitude of photos and science riches to come from Juno.
“Juno on Jupiter’s Doorstep,” says a NASA description. “And the alternating light and dark bands of the planet’s clouds are just beginning to come into view,” revealing its “distinctive swirling bands of orange, brown and white.”
This color view of Jupiter and its four largest moons — Io, Europa, Ganymede and Callisto — was taken by the JunoCam camera on NASA’s Juno spacecraft on June 21, 2016, at a distance of 6.8 million miles (10.9 million kilometers) from Jupiter. Image credit: NASA/JPL-Caltech/MSSS
Rather appropriately for an American space endeavor, the fate of the entire mission hinges on do or die ‘Independence Day’ fireworks.
On the evening of July 4, Juno must fire its main engine for 35 minutes.
The Joy of JOI – or Jupiter Orbit Insertion – will place NASA’s robotic explorer into a polar orbit around the gas giant.
The approach over the north pole is unlike earlier probes that approached from much lower latitudes nearer the equatorial zone, and thus provide a perspective unlike any other.
After a five-year and 2.8 Billion kilometer (1.7 Billion mile) outbound trek to the Jovian system and the largest planet in our solar system and an intervening Earth flyby speed boost, the moment of truth for Juno is now inexorably at hand.
This colorized composite shows more than half of Earth’s disk over the coast of Argentina and the South Atlantic Ocean as the Juno probe slingshotted by on Oct. 9, 2013 for a gravity assisted acceleration to Jupiter. The mosaic was assembled from raw images taken by the Junocam imager. Credit: NASA/JPL/SwRI/MSSS/Ken Kremer/Marco Di Lorenzo
And preparations are in full swing by the science and engineering team to ensure a spectacular Fourth of July fireworks display.
The team has been in contact with Juno 24/7 since June 11 and already uplinked the rocket firing parameters.
Signals traveling at the speed of light take 10 minutes to reach Earth.
The protective cover that shields Juno’s main engine from micrometeorites and interstellar dust was opened on June 20.
“And the software program that will command the spacecraft through the all-important rocket burn was uplinked,” says NASA.
The pressurization of the propulsion system is set for June 28.
“We have over five years of spaceflight experience and only 10 days to Jupiter orbit insertion,” said Rick Nybakken, Juno project manager from NASA’s Jet Propulsion Laboratory in Pasadena, California, said in a statement.
“It is a great feeling to put all the interplanetary space in the rearview mirror and have the biggest planet in the solar system in our windshield.”
On the night of orbital insertion, Juno will fly within 2,900 miles (4,667 kilometers) of the Jovian cloud tops.
All instruments except those critical for the JOI insertion burn on July 4, will be tuned off on June 29. That includes shutting down Junocam.
“If it doesn’t help us get into orbit, it is shut down,” said Scott Bolton, Juno’s principal investigator from the Southwest Research Institute in San Antonio.
“That is how critical this rocket burn is. And while we will not be getting images as we make our final approach to the planet, we have some interesting pictures of what Jupiter and its moons look like from five-plus million miles away.”
During a 20 month long science mission – entailing 37 orbits lasting 11 days each – the probe will plunge to within about 3000 miles of the turbulent cloud tops and collect unprecedented new data that will unveil the hidden inner secrets of Jupiter’s origin and evolution.
“Jupiter is the Rosetta Stone of our solar system,” says Bolton. “It is by far the oldest planet, contains more material than all the other planets, asteroids and comets combined and carries deep inside it the story of not only the solar system but of us. Juno is going there as our emissary — to interpret what Jupiter has to say.”
During the orbits, Juno will probe beneath the obscuring cloud cover of Jupiter and study its auroras to learn more about the planet’s origins, structure, atmosphere and magnetosphere.
Junocam has already taken some striking images during the Earth flyby gravity assist speed boost on Oct. 9, 2013.
For example the dazzling portrait of our Home Planet high over the South American coastline and the Atlantic Ocean.
For a hint of what’s to come, see our colorized Junocam mosaic of land, sea and swirling clouds, created by Ken Kremer and Marco Di Lorenzo.
NASA’s Juno probe captured the image data for this composite picture during its Earth flyby on Oct. 9 over Argentina, South America and the southern Atlantic Ocean. Raw imagery was reconstructed and aligned by Ken Kremer and Marco Di Lorenzo, and false-color blue has been added to the view taken by a near-infrared filter that is typically used to detect methane. Credit: NASA/JPL/SwRI/MSSS/Ken Kremer/Marco Di Lorenzo
As Juno sped over Argentina, South America and the South Atlantic Ocean it came within 347 miles (560 kilometers) of Earth’s surface.
During the flyby, the science team observed Earth using most of Juno’s nine science instruments since the slingshot also serves as an important dress rehearsal and key test of the spacecraft’s instruments, systems and flight operations teams.
Juno soars skyward to Jupiter on Aug. 5, 2011 from launch pad 41 at Cape Canaveral Air Force Station at 12:25 p.m. EDT. View from the VAB roof. Credit: Ken Kremer/kenkremer.com
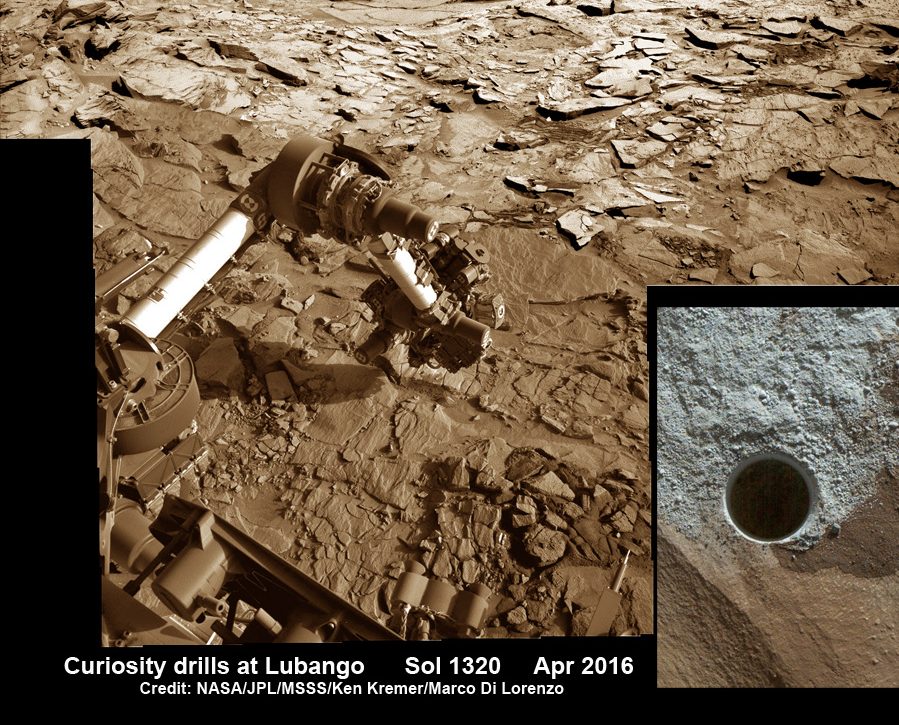
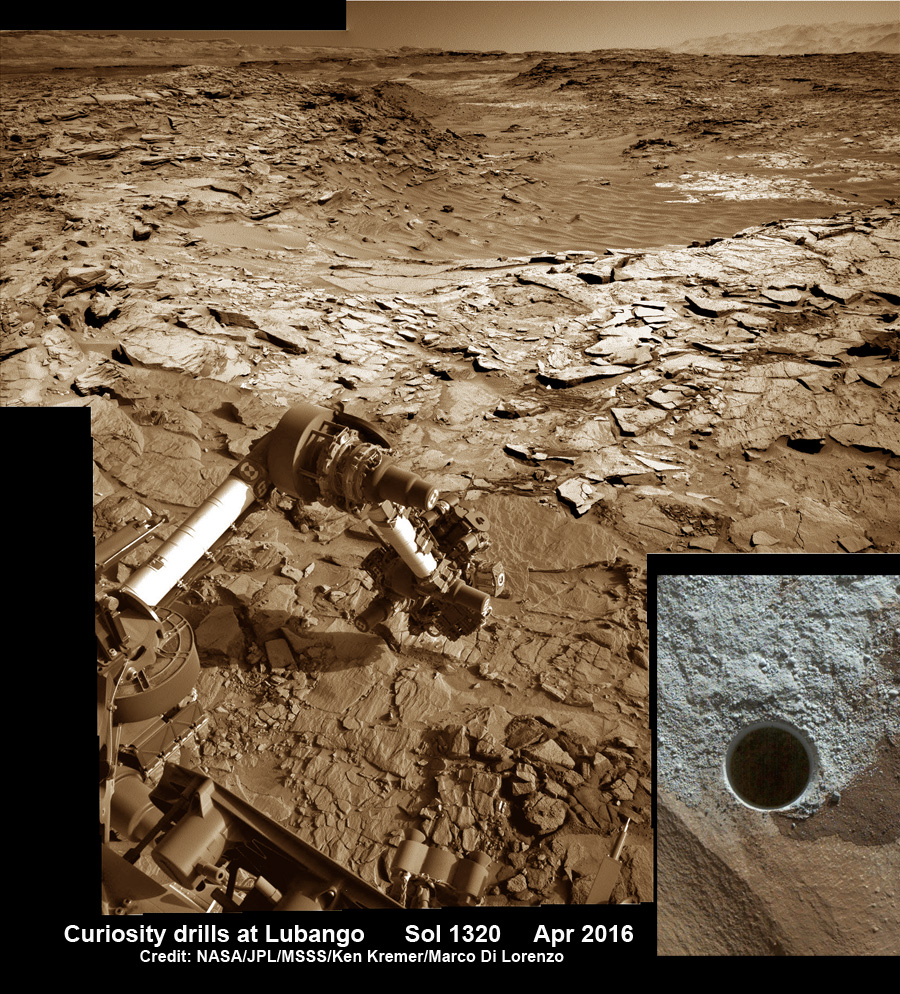
Curiosity rover reached out with robotic arm and drilled into ‘Lubango’ outcrop target on Sol 1320, Apr. 23, 2016, in this photo mosaic stitched from navcam camera raw images and colorized. Lubango is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. MAHLI camera inset image shows drill hole up close on Sol 1321. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity rover reached out with robotic arm and drilled into ‘Lubango’ outcrop target on Sol 1320, Apr. 23, 2016, in this photo mosaic stitched from navcam camera raw images and colorized. Lubango is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. MAHLI camera inset image shows drill hole up close on Sol 1321. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s CuriosityMars Science Laboratory (MSL) rover successfully bored a brand new hole in Mars at a tantalizing sandstone outcrop in the ‘Lubango’ fracture zone this past weekend on Sol 1320, Apr. 23, and is now carefully analyzing the shaken and sieved drill tailings for clues to Mars watery past atop the Naukluft Plateau.
“We have a new drill hole on Mars!” reported Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
“All of the activities planned for last weekend have completed successfully.”
“Lubango” counts as the 10th drilling campaign since the one ton rover safely touched down on the Red Planet some 44 months ago inside the targeted Gale Crater landing site, following the nailbiting and never before used ‘sky crane’ maneuver.
After transferring the cored sample to the CHIMRA instrument for sieving it, a portion of the less than 0.15 mm filtered material was successfully delivered this week to the CheMin miniaturized chemistry lab situated in the rovers belly.
CheMin is now analyzing the sample and will return mineralogical data back to scientists on earth for interpretation.
The science team selected Lubango as the robots 10th drill target after determining that it was altered sandstone bedrock and had an unusually high silica content based on analyses carried out using the mast mounted ChemCam laser instrument.
Indeed the rover had already driven away for further scouting and the team then decided to return to Lubango after examining the ChemCam results. They determined the ChemCam and other data observation were encouraging enough – regarding how best to sample both altered and unaltered Stimson bedrock – to change course and drive backwards.
Lubango sits along a fracture in an area that the team dubs the Stimson formation, which is located on the lower slopes of humongous Mount Sharp inside Gale Crater.
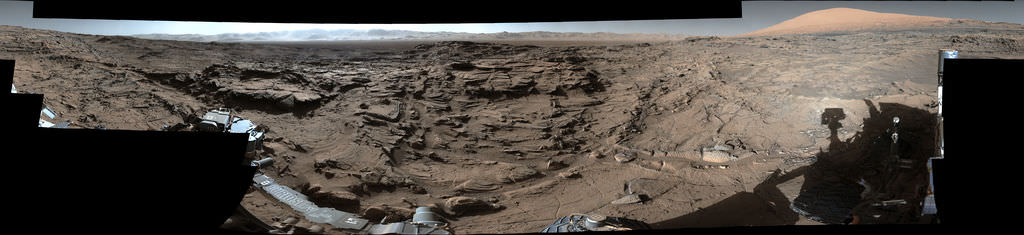
This mid-afternoon, 360-degree panorama was acquired by the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover on April 4, 2016, as part of long-term campaign to document the context and details of the geology and landforms along Curiosity’s traverse since landing in August 2012. Credit: NASA/JPL-Caltech/MSSS
Since early March, the rover has been traversing along a rugged region dubbed the Naukluft Plateau.
“The team decided to drill near this fracture to better understand both the altered and unaltered Stimson bedrock,” noted Herkenhoff.
See our photo mosaic above showing the geologically exciting terrain surrounding Curiosity with its outstretched 7-foot-long (2-meter-long) robotic arm after completing the Lubango drill campaign on Sol 1320. The mosaic was created by the imaging team of Ken Kremer and Marco Di Lorenzo.
Its again abundantly clear from the images that beneath the rusty veneer of the Red Planet lies a greyish interior preserving the secrets of Mars ancient climate history.
Curiosity rover views ‘Lubango’ drill target up close in this MAHLI camera image taken on Sol 1321, Apr. 24, 2016, processed to enhance details. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
The team then commanded Curiosity to dump the unsieved portion of the sample onto the ground and examine the leftover drill tailing residues with the Mastcam, Navcam, MAHLI multispectral characterization cameras and the APXS spectrometer. ChemCam is also being used to fire laser shots in the wall of the drill hole to make additional chemical measurements.
To complement the data from Lubango, scientists are now looking around the area for a suitable target of unaltered Stimson bedrock as the 11th drill target.
“The color information provided by Mastcam is really helpful in distinguishing altered versus unaltered bedrock,” explained MSL science team member Lauren Edgar, Research Geologist at the USGS Astrogeology Science Center, in a mission update.
The ChemCam laser has already shot at the spot dubbed “Oshikati,” a potential target for the next drilling campaign.
“On Sunday we will drive to our next drilling location, which is on a nearby patch of normal-looking Stimson sandstone,” wrote Ryan Anderson, planetary scientist at the USGS Astrogeology Science Center and a member of the ChemCam team on MSL in today’s (Apr. 28) mission update.
As time permits, the Navcam imager is also being used to search for dust devils.
As I reported here, Opportunity recently detected a beautiful looking dust devil on the floor of Endeavour crater on April 1. Dust devil detections by the NASA rovers are relatively rare.
Curiosity has been driving to the edge of the Naukluft Plateau to reach the interesting fracture zone seen in orbital data gathered from NASA’s Mars orbiter spacecraft.
Curiosity images Naukluft Plateau in this photo mosaic stitched from Mastcam camera raw images taken on Sol1296. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
The rover is almost finished crossing the Naukluft Plateau which is “the most rugged and difficult-to-navigate terrain encountered during the mission’s 44 months on Mars,” says NASA.
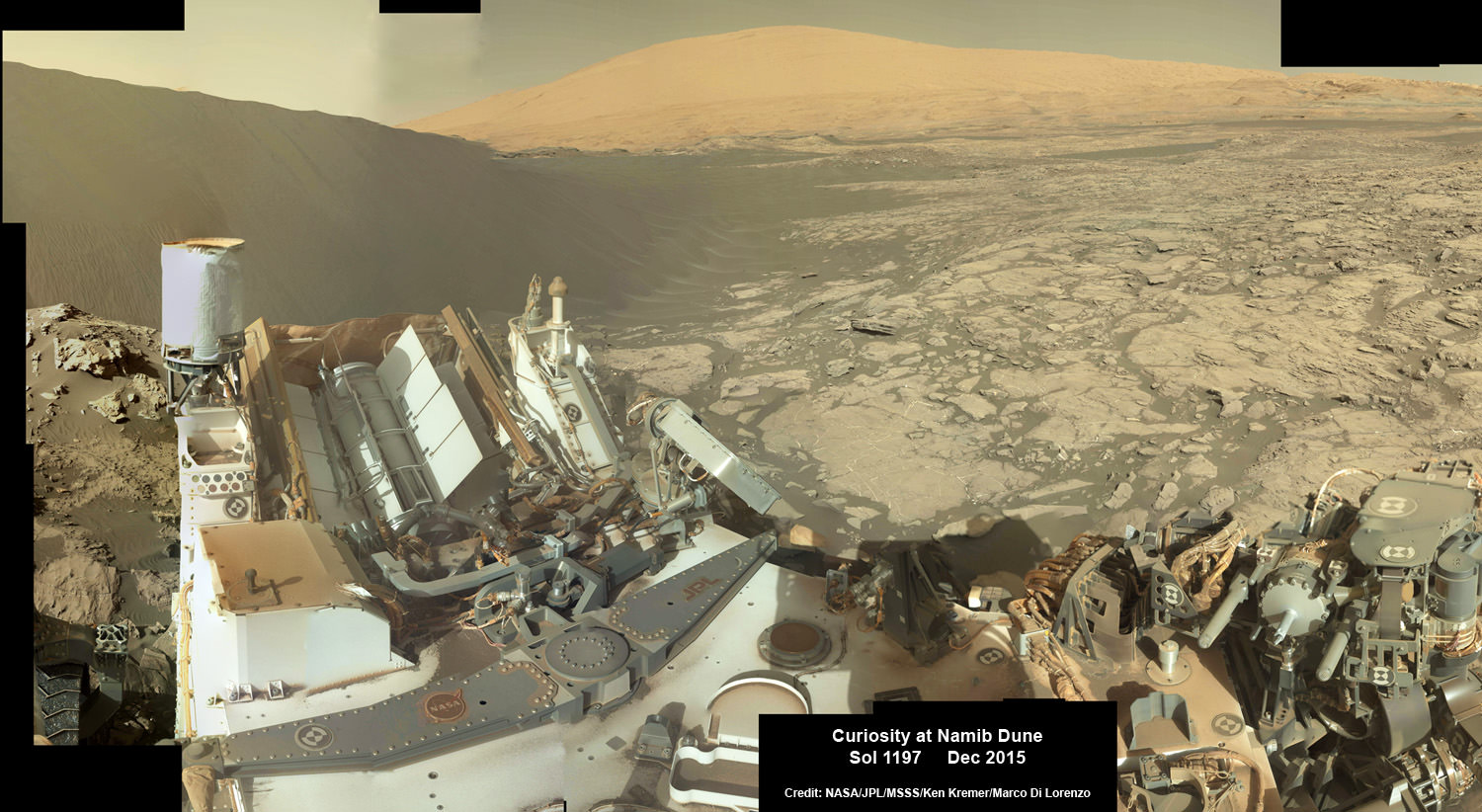
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 – backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of today, Sol 1325, April 28, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing, and taken over 320,100 amazing images.
Spectacular Mastcam camera view of Gale Crater rim from Curiosity on Sol 1302 enhanced to bring out detail. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
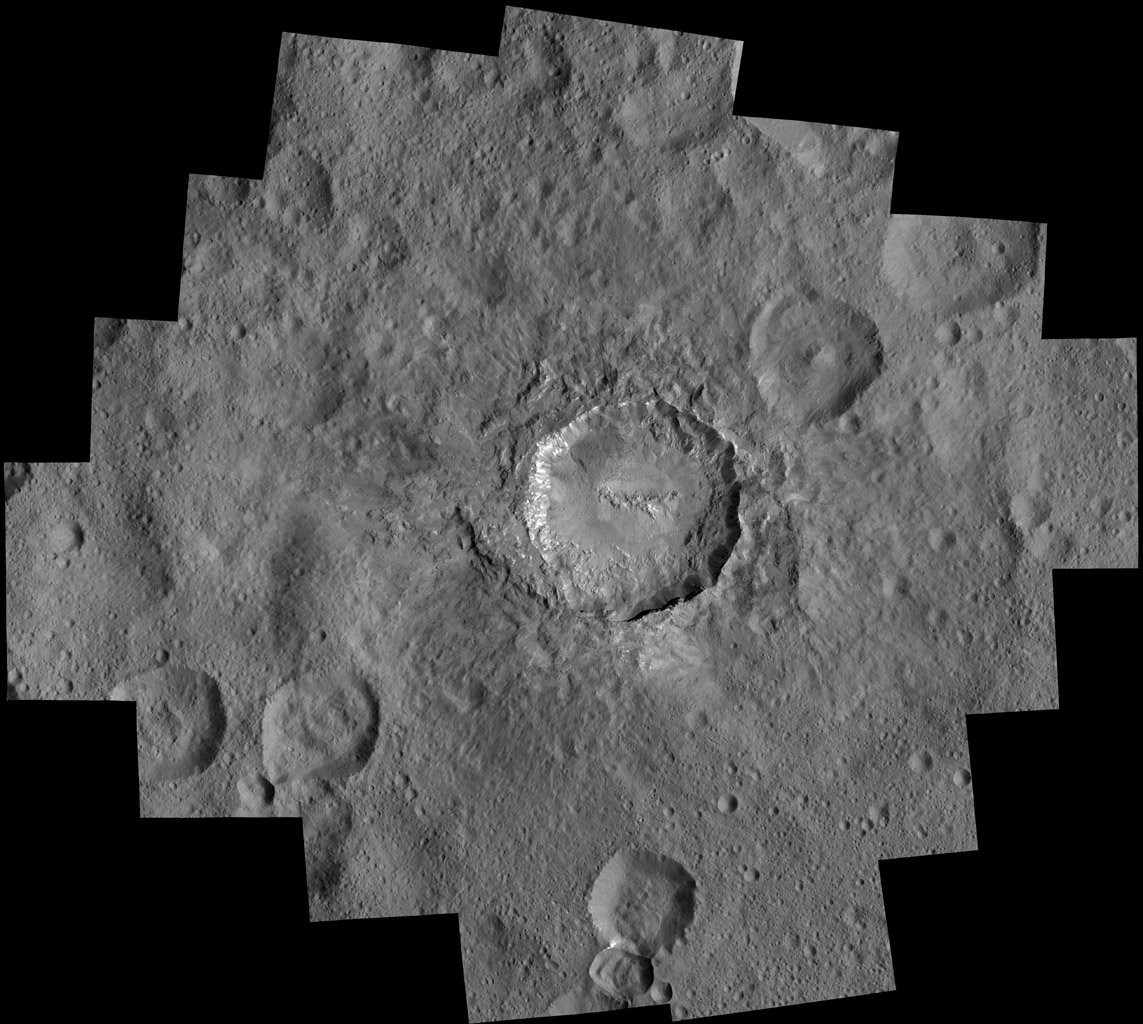
Ceres' Haulani Crater, with a diameter of 21 miles (34 kilometers), shows evidence of landslides from its crater rim. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
Ceres’ Haulani Crater, with a diameter of 21 miles (34 kilometers), shows evidence of landslides from its crater rim. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
Now in orbit for just over a year at dwarf planet Ceres, NASA’s Dawn spacecraft continues to astound us with new discoveries gleaned from spectral and imagery data captured at ever decreasing orbits as well as since the probe arrived last December at the lowest altitude it will ever reach during the mission.
Mission scientists have just released marvelous new images of Haulani and Oxo craters revealing landslides and mysterious slumps at several of the mysterious bright craters on Ceres – the largest asteroid in the main Asteroid Belt between Mars and Jupiter.
The newly released image of oddly shaped Haulani crater above, shows the crater in enhanced color and reveals evidence of landslides emanating from its crater rim.
“Rays of bluish ejected material are prominent in this image. The color blue in such views has been associated with young features on Ceres,” according to the Dawn science team.
“Enhanced color allows scientists to gain insight into materials and how they relate to surface morphology.”
Look at the image closely and you’ll see its actually polygonal in nature – meaning it resembles a shape made of straight lines – unlike most craters in our solar system which are nearly circular.
”The straight edges of some Cerean craters, including Haulani, result from pre-existing stress patterns and faults beneath the surface,” says the science team.
Haulani Crater has a diameter of 21 miles (34 kilometers) and apparently was formed by an impacting object relatively recently in geologic time and is also one of the brightest areas on Ceres.
“Haulani perfectly displays the properties we would expect from a fresh impact into the surface of Ceres. The crater floor is largely free of impacts, and it contrasts sharply in color from older parts of the surface,” said Martin Hoffmann, co-investigator on the Dawn framing camera team, based at the Max Planck Institute for Solar System Research, Göttingen, Germany, in a statement.
The enhanced color image was created from data gathered at Dawn’s High Altitude Mapping Orbit (HAMO), while orbiting at an altitude of 915 miles (1,470 kilometers) from Ceres.
Data from Dawn’s VIR instrument shows that Haulani’s surface is comprised of different materials than its surroundings.
“False-color images of Haulani show that material excavated by an impact is different than the general surface composition of Ceres. The diversity of materials implies either that there is a mixed layer underneath, or that the impact itself changed the properties of the materials,” said Maria Cristina de Sanctis, the VIR instrument lead scientist, based at the National Institute of Astrophysics, Rome.
Since mid-December, Dawn has been orbiting Ceres in its Low Altitude Mapping Orbit (LAMO), at a distance of 240 miles (385 kilometers) from Ceres, resulting in the most stunning images ever of the dwarf planet.
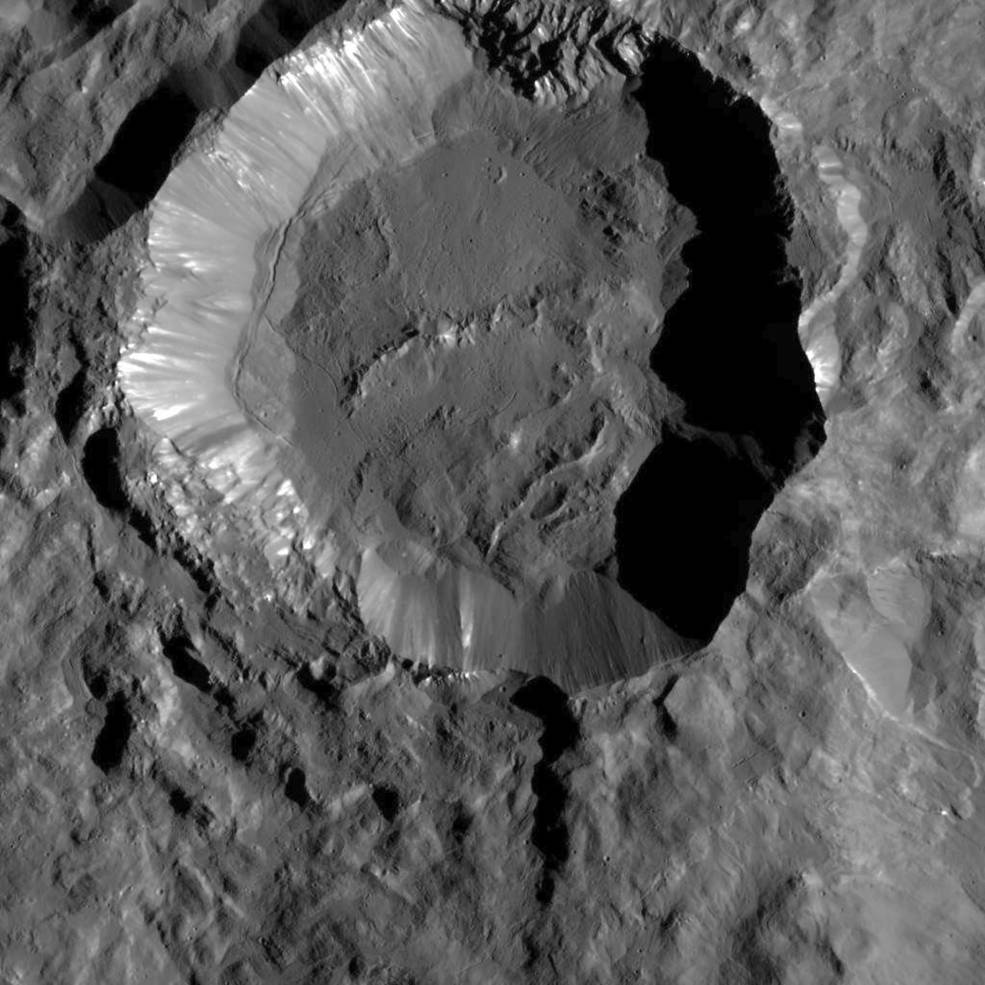
By way of comparison the much higher resolution image of Haulani crater below, is a mosaic of views assembled from multiple images taken from LAMO at less than a third of the HAMO image distance – at only 240 miles (385 kilometers) above Ceres.
Haulani Crater at LAMO. NASA’s Dawn spacecraft took this mosaic view of Haulani Crater at a distance of 240 miles (385 kilometers) from the surface of Ceres. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA/PSI
Dawn has also been busy imaging Oxo Crater, which despite its small size of merely 6-mile-wide (10-kilometer-wide) actually counts as a “hidden treasure” on Ceres – because it’s the second-brightest feature on Ceres!
Only the mysterious bright region comprising a multitude of spots inside Occator Crater shine more brightly on Ceres.
Most importantly, Oxo Crater is the only place on Ceres where Dawn has detected water at the surface so far. Via VIR, Dawn data indicate that the water exists either in the form of ice or hydrated minerals. Scientists speculate that the water was exposed either during a landslide or an impact.
“Little Oxo may be poised to make a big contribution to understanding the upper crust of Ceres,” said Chris Russell, principal investigator of the mission, based at the University of California, Los Angeles.
The signatures of minerals detected on the floor of Oxo crater appears to be different from the rest of Ceres.
Furthermore Oxo is “also unique because of the relatively large “slump” in its crater rim, where a mass of material has dropped below the surface.”
Oxo Crater on Ceres is unique because of the relatively large “slump” in its crater rim. The 6-mile-wide (10-kilometer-wide) Oxo crater is the second-brightest feature on Ceres. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA/PSI
Dawn is Earth’s first probe in human history to explore any dwarf planet, the first to explore Ceres up close and the first to orbit two celestial bodies.
The asteroid Vesta was Dawn’s first orbital target where it conducted extensive observations of the bizarre world for over a year in 2011 and 2012.
The mission is expected to last until at least later into 2016, and possibly longer, depending upon fuel reserves.
Dawn will remain at its current altitude at LAMO for the rest of its mission, and indefinitely afterward, even when no further communications are possible.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
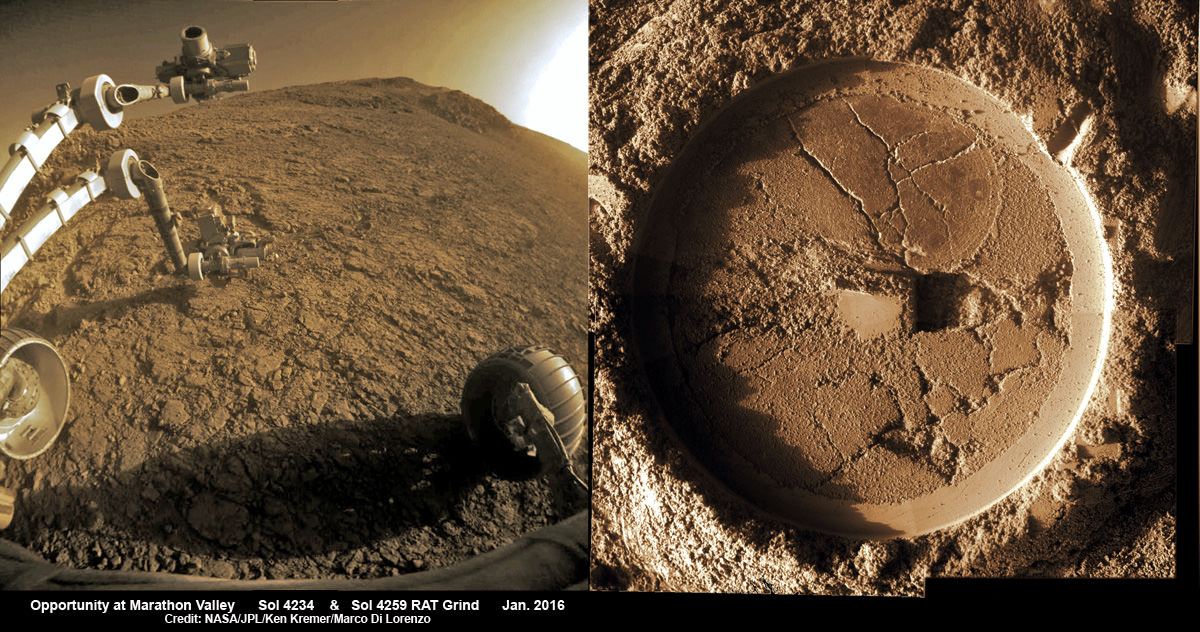
Composite hazcam camera image (left) shows the robotic arm in motion as NASA’s Mars Exploration Rover Opportunity places the tool turret on the target named “Private John Potts” on Sol 4234 to brush away obscuring dust. Rover is actively working on the southern side of “Marathon Valley” which slices through western rim of Endeavour Crater. On Sol 4259 (Jan. 16, 2016), Opportunity completed grinds with the Rock Abrasion Tool (RAT) to exposure rock interior for elemental analysis, as seen in mosaic (right) of four up close images taken by Microscopic Imager (MI). Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Composite hazcam camera image (left) shows the robotic arm in motion as NASA’s Mars Exploration Rover Opportunity places the tool turret on the target named “Private John Potts” on Sol 4234 to brush away obscuring dust. Rover is actively working on the southern side of “Marathon Valley” which slices through western rim of Endeavour Crater. On Sol 4259 (Jan. 16, 2016), Opportunity completed grinds with the Rock Abrasion Tool (RAT) to exposure rock interior for elemental analysis, as seen in mosaic (right) of four up close images taken by Microscopic Imager (MI). Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s world famous Mars Exploration RoverOpportunity continues blazing a daily trail of unprecedented science first’s, still swinging her robotic arm robustly into action at a Martian “Mining Zone” on the 12th anniversary of her hair-raising Red Planet touchdown this week, a top rover scientist told Universe Today.
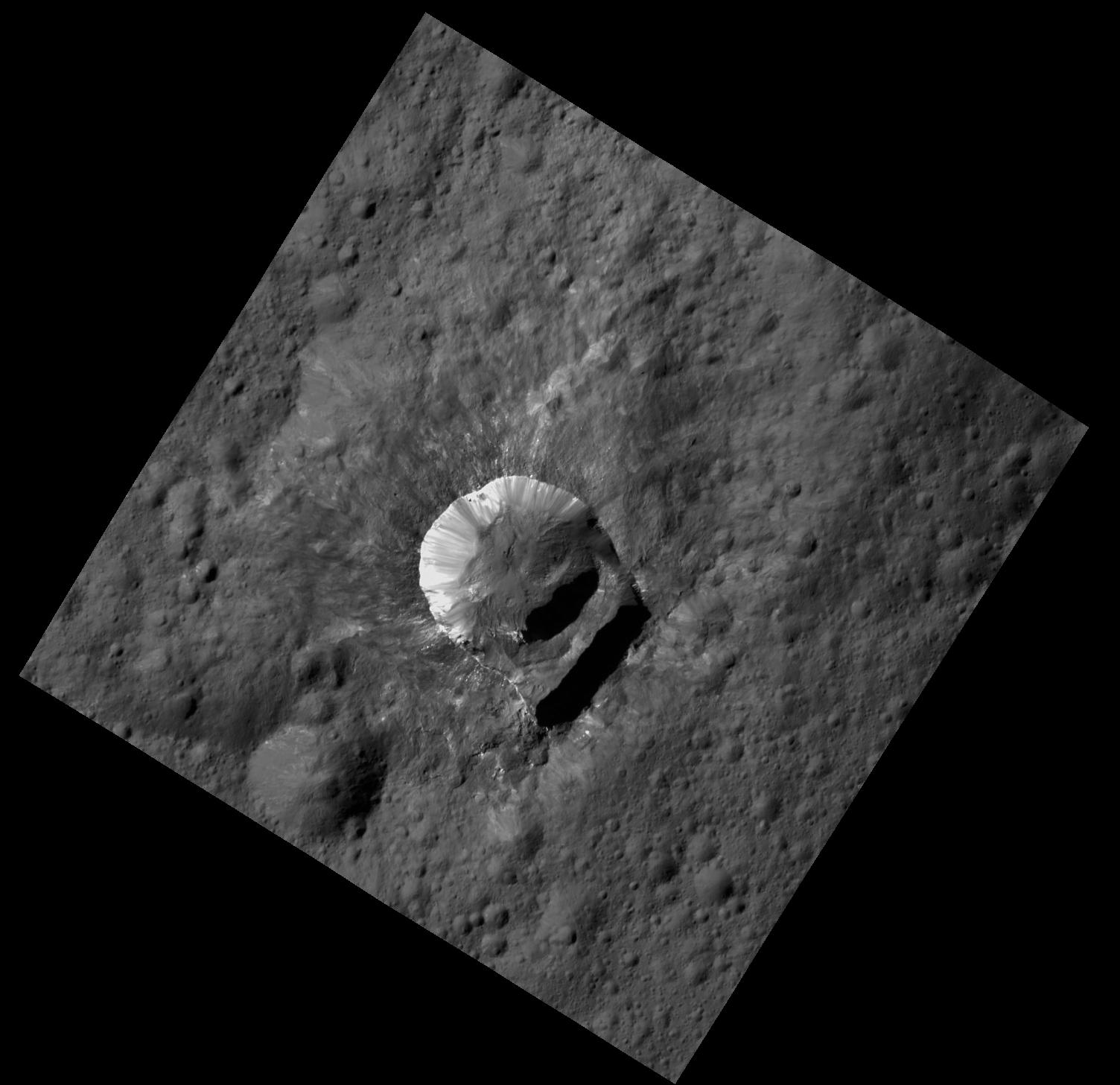
This image from NASA's Dawn spacecraft shows Kupalo Crater, one of the youngest craters on Ceres. The crater has bright material exposed on its rim and walls, which could be salts. Its flat floor likely formed from impact melt and debris. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
This image from NASA’s Dawn spacecraft shows Kupalo Crater, one of the youngest craters on Ceres. The crater has bright material exposed on its rim and walls, which could be salts. Its flat floor likely formed from impact melt and debris. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
NASA’s Dawn spacecraft has unveiled a new patch of intriguing bright features in the most recent series of striking close-up images taken just after the probe reached the lowest altitude it will ever reach during the mission.
From Dawn’s current altitude of 240 miles (385 kilometers) above Ceres, every image taken from now on of the “unique landforms” will be of the highest resolution attainable since the ship will never swoop down closer to the pockmarked surface for science. Continue reading “Dawn Unveils New Bright Features on Ceres in Striking Close-Ups”
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 - backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Just in time for the holidays, NASA’sCuriosity rover is celebrating Christmas 2015 at a Red Planet Paradise – spectacular “Namib Dune.” And she marked the occasion by snapping her first ever color self-portrait with the mast mounted high resolution Mastcam 34 mm camera.