Thanks to the Apollo missions and countless robotic explorers, our understanding of the physical conditions, composition, and geological history of the Moon has advanced considerably. For example, analysis of lunar rocks, regolith, and seismic measurements of the Moon's interior structure led to the theory that the Earth and Moon formed roughly 4.5 billion years ago. Since the turn of the century, missions have also revealed that there is water on the Moon, most of which consists of ice in Permanently Shadowed Regions (PSRs) around the poles.
To learn more about the Moon and ensure long-term habitability, missions that can explore the subsurface are needed. That is the recommendation a team of researchers made in a recent study, which explores the possibility of using a robot—Persistent Lunar Exploration with Autonomous SubsurfacE Robots(PLEASER)—to accomplish these tasks. These missions would be able to explore one of the most promising environments for future lunar bases and habitats while also revealing more about the Moon's formation, evolution, and properties.
The research was conducted by Adrian Stoica, Jared Long-Fox, and Brian Wilcox. While Stoica and Wilcox are researchers with LunaSol Space LLC and the California-based biofuels company Marine Bioenergy Inc.(respectively), Long-Fox is a Planetary Exploration Research Scientist with the Center for Lunar & Asteroid Surface Studies(CLASS) at the University of Central Florida (UCF) and a NASA Space Technology Graduate Research Opportunities(NSTGRO) Fellow.
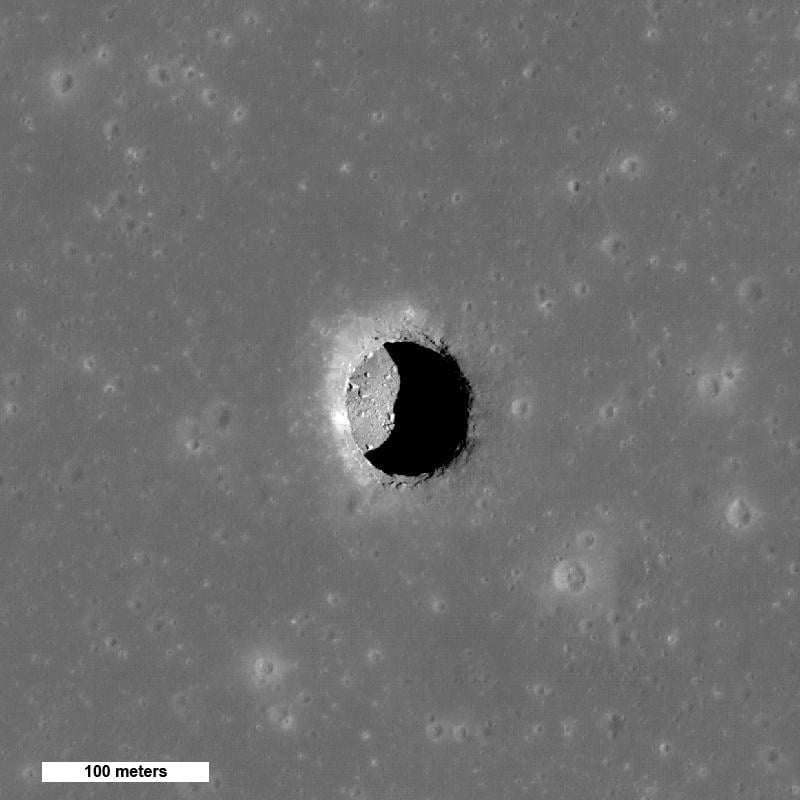
Subsurface lava tubes and recesses on the Moon have become a major focal point in recent years. Based on data obtained by multiple orbiters, landers, and rovers, scientists have learned that these features—common to Earth—are significantly larger on the Moon. On Earth, lava tubes do not exceed 30 meters (100 ft) in diameter. But owing to the Moon's lower gravity, scientists have estimated that these features could measure 385 m (1,260 ft) or more in diameter.
Like lava tubes on Earth, some lunar tubes are accessible thanks to collapsed sections known as "skylights." As part of their long-term visions for lunar exploration and development, NASA and other space agencies (notably China) are considering establishing habitats in these tubes to take advantage of the protection they offer. These include warmer temperatures (~20° C, 70° F) and natural shielding from extreme temperature variations, the vacuum of space, and micrometeoroids.
To accomplish this and learn more about the Moon's properties, composition, and geological history, NASA and other space agencies need dedicated missions to explore these features. As Long-Fox told Universe Today via email, their concept for a subsurface robot would enable all of this by being able to interact with both the surface and subsurface regolith directly:
Just like on Earth, the different layers (stratigraphy) tell the history of the area you are in. On the Moon, there is no wind or flowing water, so the main processes that shape the surface are impacts. The impacts, big or small, eject regolith and rocks that get thrown elsewhere on the surface. This means that there will be different layers deposited from different impacts, and understanding this evolution of the surface will really help us understand the history and current state of the Moon.
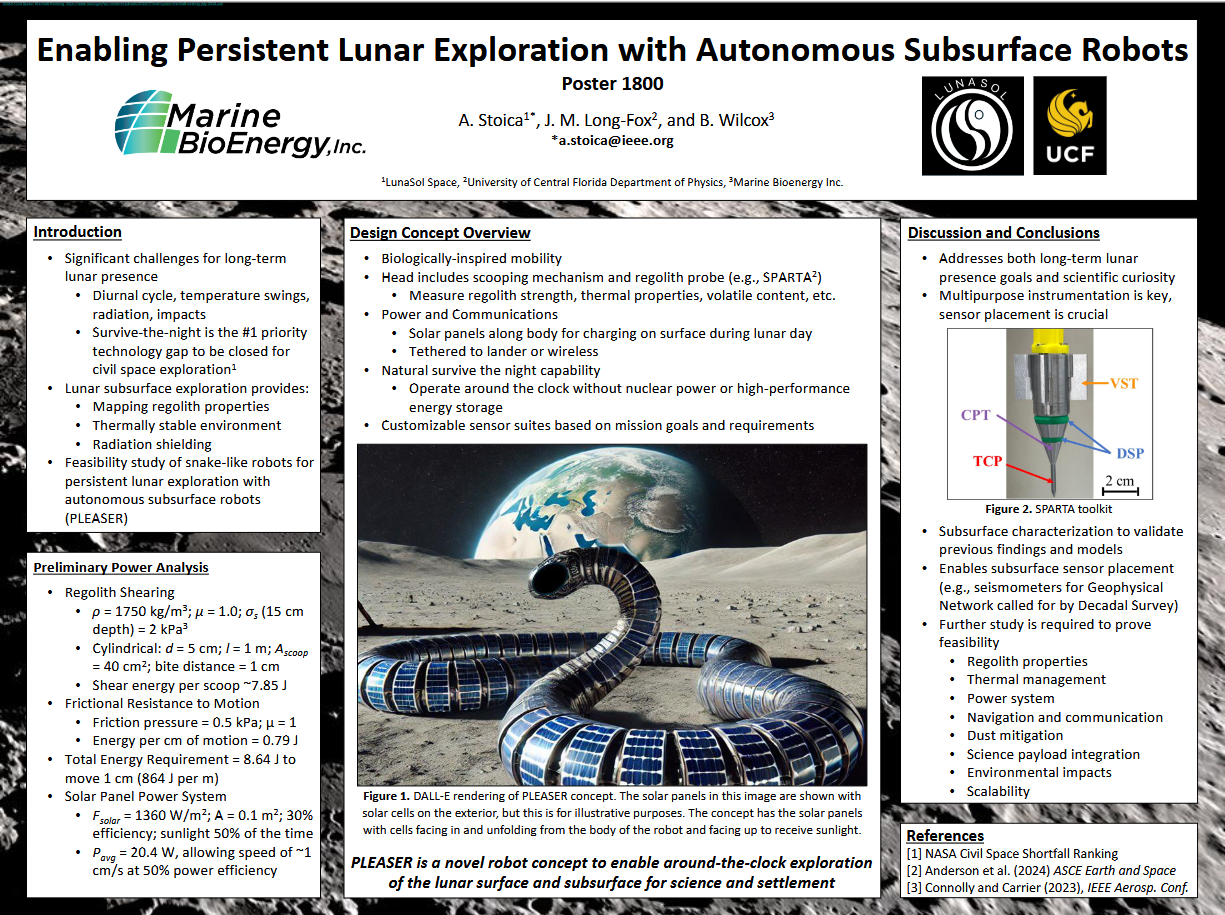 As part of their study, the team explored multiple methods for powering the robots, design considerations, and the potential applications and benefits this mission could have. The result was their PLEASER concept, which calls for a deployable/retractable regolith probe within a snake-like robot. The snake configuration would allow PLEASER to penetrate the surrounding lunar regolith to measure its strength, thermal conductivity, and dielectric properties. It could also burrow into the surface or slither its way into skylights, seeking out subsurface structures for further investigation. As Long-Fox further explained:
As part of their study, the team explored multiple methods for powering the robots, design considerations, and the potential applications and benefits this mission could have. The result was their PLEASER concept, which calls for a deployable/retractable regolith probe within a snake-like robot. The snake configuration would allow PLEASER to penetrate the surrounding lunar regolith to measure its strength, thermal conductivity, and dielectric properties. It could also burrow into the surface or slither its way into skylights, seeking out subsurface structures for further investigation. As Long-Fox further explained:
"This robot would the physical state of the regolith, informing not only on geologic history but also the presence of volatiles such as water ice or the suitability of the area being explored for infrastructure development like habitats, roadways, launch/landing pads, and more. Just by the nature of the robot traversing in the subsurface, it will need to displace the regolith around it. We envision doing this with a scooping system, and by measuring forces it takes to scoop the regolith as well as resistance to the serpentine motion of the robot, we can estimate critical properties of the surface and subsurface regolith.
In terms of power, the team considered multiple options, including external power, a cable connected to a power source, a Radioisotope Thermoelectric Generator (RTG),****and solar panels. One design they considered featured solar panels embedded along the snake-like body (see above image) that could be deployed and retracted. As Stoica indicated:
Solar panels that are folded inside the body and deploy outside of the body when the robot comes to the surface to 'bathe in the Sun,' so to speak, to get energy. We mostly considered a fusiform body snake/worm shape. Others have done studies of sand snake movements - I am aware of some universities that produce some nice simulations and demos for earth conditions - in sandy soil.
 The team hopes their study will help produce concepts for a mobile platform that can directly explore the lunar surface and subsurface, regardless of whether it is lunar day or night. Robots of this nature will also be able to search for subsurface areas more suitable for developing a lunar base, road, or other infrastructure elements. As noted, the scientific returns are also promising, as subsurface robots would create unprecedented opportunities for exploring the Moon's geology.
The team hopes their study will help produce concepts for a mobile platform that can directly explore the lunar surface and subsurface, regardless of whether it is lunar day or night. Robots of this nature will also be able to search for subsurface areas more suitable for developing a lunar base, road, or other infrastructure elements. As noted, the scientific returns are also promising, as subsurface robots would create unprecedented opportunities for exploring the Moon's geology.
In addition to studying lunar regolith and rocks in situ, this robot could deploy subsurface sensors like seismometers. Not only would these reveal more about the Moon's interior structure, but they are notoriously difficult to deploy on the surface. Lastly, as Stoica added, these robots may someday be able to create subsurface tunnels that could house lunar habitats:
[A]fter the initial stages, once routes/tunnels (for fun, I would just call them 'artificial/fake lava tubes'), other equipment would be more like surface robots. So, in this respect, these may be like the machines that build underground tunnels (drilling, burrowing) but perhaps more in the formation of teams/swarms rather than a big machine. This is pure speculation at this point, no tradeoffs were made, and how many exactly and how big is undetermined. Though I have looked at swarms in my life, I am very cautious when it comes to throwing words like swarms, etc., in terms of operational space robotics in the next 1-2 decades, while the concept we refer to may only be a few years ahead.
Further Reading:USRA
