How can walking robots deliver more efficient in-situ robotic exploration on the Moon compared to other types of robots? This is what a recent study presented at the56^th^Lunar and Planetary Science Conferencehopes to address as a team of researchers from the University of Southern California (USC) discussed the benefits of using legged robots for lunar exploration regarding gait speed (walking speed). This study has the potential to help engineers, scientists, mission planners, and astronauts develop novel robotic designs to conduct more efficient science and mission objectives on future Moon surface missions.
Here,Universe Todaydiscusses this incredible research with Dr. Feifei Qian, who is a WiSE Gabilan Assistant Professor and Principal Investigator of the Robot Locomotion And Navigation Dynamics (RoboLAND) laboratory in the Viterbi School of Engineering at USC and a co-author on the study, regarding the motivation behind the study, significant results, next steps in making walking Moon robots a reality, and how walking robots can contribute to NASA's Artemis missions. Therefore, what was the motivation behind the study?
Dr. Qian tellsUniverse Today, "As we prepare for exploring the moon, Mars, and beyond, we want our robots to be able to effectively move on the challenging planetary surfaces that often contain soft sand, steep slopes, and rugged rocks. As a legged being like us, the dog-like walking robots have the potential to reach a wide range of challenging landscapes. Our motivation is to develop technology to enable future legged rovers with better mobility and better sensing abilities to help us explore these planets."
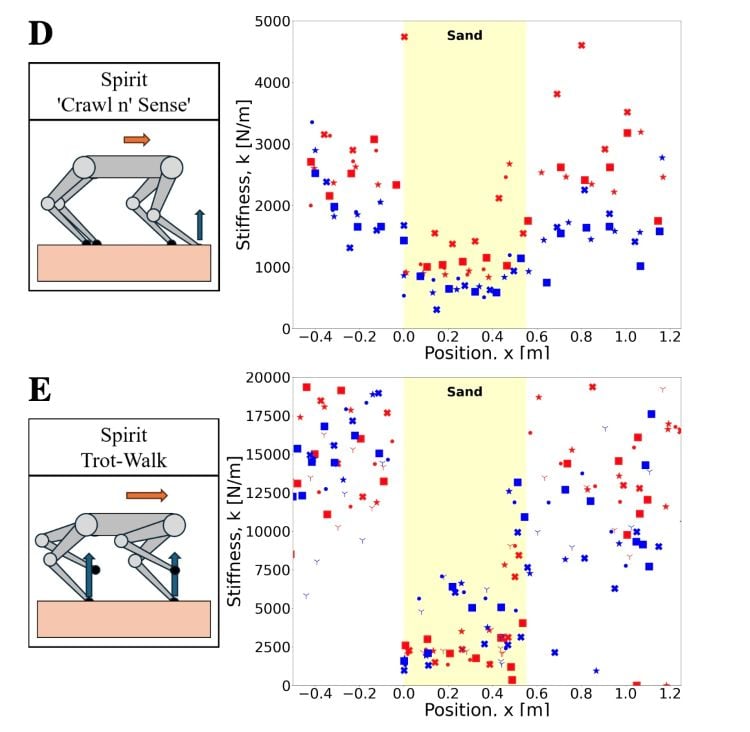
For the study, the researchers evaluated two types of gaits using two types of sand for their four-legged robots, Crawl-N-Sense and Trot Walk that exhibited a slower and faster gait, respectively. While the Crawl-N-Sense robot moved one leg at a time while using the other three for sensing the ground and balance, Trot Walk moved diagonal legs simultaneously, mimicking the Ghost Robotics Spirit 40 robot often seen on social media.
Both robots were subjected to walking through homogenous sand and heterogenous sand, the latter of which possessed surface crust on top. While the homogenous sand was used to evaluate depth penetration with the robot's legs, the heterogenous sand was used to evaluate sand strength by the robot's legs. Therefore, what were the most significant results from the study?
"The most significant result is that we demonstrated a new capability for these robot dogs to use their legs to measure planetary surface properties as they walk," Dr. Qian tellsUniverse Today. "Humans and animals are capable of "feeling" the terrain underneath our feet and adapt our way of walking accordingly. If we are able to teach our robots to do the same, they would be able to adapt their locomotion based on the planetary soil softness and potentially avoid the catastrophic 'stuck in sand pit' failures that forced the Mars rover to abort its mission. Moreover, the robots can potentially detect the existence of water ice on the moon, simply by walking around! This could allow these exploring robot dogs to help us find traces of water or other scientifically-interesting signatures efficiently."
Robotic surface exploration has been the cornerstone of planetary science missions since the dawn of the Space Age, with several nations sending landers and rovers to the Moon, Mars, and Saturn's largest moon, Titan. Whether a probe was a lander or rover was determined based on mission parameters and scientific objectives, this study could mark the first time that legged robots are used on the surface of another planetary body.
While this study successfully demonstrated the feasibility of walking robots potentially exploring the lunar surface, their deployment on the lunar surface still has a long way to go. This is because space missions undergo a rigorous and lengthy selection process involving countless tests, re-designs, operational milestones, and funding, which can take several years to complete. Therefore, what are the next steps in making these walking Moon robots a reality?
"One key next step is to teach the robot what those forces it felt from its legs mean, so that it can recognize these and communicate to us (humans)," Dr. Qian tellsUniverse Today. "Another key step is to figure out what strategies the robot should use to walk on different types of challenging planetary surfaces. We can do both by training the robot on earth with a wide range of regolith materials, in laboratory as well as in field testing! We have taken the robots to many planetary analogue environments to train, including White Sands in New Mexico, which is a Mars-analogue desert; and Mt Hood in Oregon, which is a lunar-analogue volcanic glacier mountain."
This study comes as NASA is preparing to send humans back to the first time since Apollo 17 in 1972 with its Artemis program, including landing the first woman and person of color on the lunar surface. The goals of the Artemis program are to establish a permanent and long-term human presence on the Moon while testing new and developing technologies for future lunar missions and crewed mission to Mars under NASA's Moon to Mars Architecture. Therefore, how can these walking Moon robots contribute to the Artemis program, specifically on future crewed missions?
Dr. Qian tellsUniverse Today, "In fact, we were collaborating with Blue Origin (Honeybee Robotics) to make a space version of our robot and compete for the Artemis IV mission! There are of course specific challenges to address to send the robot into space, such as how to find sufficient power to sustain the robot for walking long distances (e.g., potentially go exploring the permanently shadowed region), and how to dissipate heat. But we are hopeful that one day we will have our robot dogs roaming on the moon, helping us explore (or even build) our future habitat!"
How will legged robots help conduct more efficient science on the lunar surface and contribute to the Artemis program in the coming years and decades? Only time will tell, and this is why we science!
As always, keep doing science & keep looking up!
