NASA’s Curiosity rover raised robotic arm with drill pointed skyward while exploring Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater - backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images taken on Sol 1833, Oct. 2, 2017 and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
What makes a rover rove? At the very basic level, it comes down to gears, and all the gears have to made very precisely: there’s no going to Mars to fix anything that doesn’t move just right. This video shows how a gear company in Rockford, Illinois made all the gears for the Curiosity rover — created from titanium — putting in extra hours and effort to get everything just right (they also made the gears for the Mars Exploration Rovers).
It also subtly emphasizes how the money spent on space exploration isn’t just stuffed into a rocket and blasted into space. Almost all of Curiosity’s parts were made from different companies in 33 states in the US; the rest came from companies in partner countries, all which employs hundreds, if not thousands, of people.
You have to bet that every person who created or touched any of the parts — big or small — on Curiosity were just as jazzed as the cheering team at JPL when the rover landed successfully. And that Curiosity is working so well and roving around in Gale Crater has to be a a great feeling of accomplishment and satisfaction, too. Continue reading “An Inside Look at Curiosity’s Inner Workings”
The beginning of Curiosity’s journeys. Credit: NASA/JPL-Caltech/Univ. of Arizona
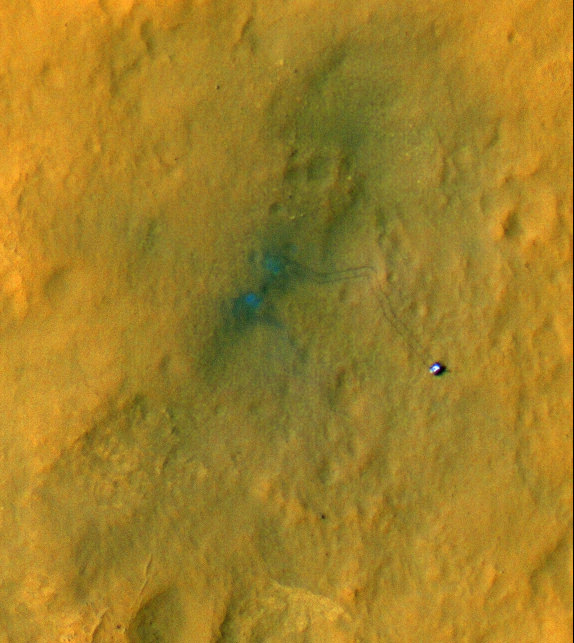
Yes, the Curiosity rover is on the move, evidenced by the rover tracks seen from above by the outstanding HiRISE camera on board the Mars Reconnaissance Orbiter. If you look closely, visible are the rover’s wheels and even the camera mast. While this image’s color has been enhanced to show the surface details better, this is still an amazing view of Curiosity’s activities, displaying the incredible resolving power of the High-Resolution Imaging Science Experiment.
“These are great pictures that help us see context,” said Curiosity mission manager Mike Watkins at a press conference today. “Plus they’re just amazing photos.”
The two “blue” marks (blue is, of course, false color) seen near the site where the rover landed were formed when reddish surface dust was blown away by the rover’s descent stage, revealing darker basaltic sands underneath. Similarly, the tracks appear darker where the rover’s wheels disturbed the top layer of dust.
Below is another great view showing Curiosity’s parachute and backshell in color, highlighting the color variations in the parachute, along with a map of where Curiosity has been and will be going.
Curiosity’s parachute and backshell in color. Credit: NASA/JPL-Caltech/Univ. of Arizona
Map of Curiosity’s travels so far. Credit: NASA/JPL-Caltech/Univ. of Arizona.
This map shows the route driven by NASA’s Mars rover Curiosity overlaid on the HiRISE image, showing where Curiosity has driving through the 29th Martian day, or sol, of the rover’s mission on Mars, which equals Sept. 4, 2012 here on Earth.
The route starts at Bradbury Landing, Curiosity’s landing site. Numbering of the dots along the line indicate the sol numbers of each drive. North is up. The scale bar is 200 meters (656 feet).
By Sol 29, Curiosity had driven at total of 358 feet (109 meters). While scientists say the rover can travel up to a hundred meters a day, the team has been putting the rover through tests of the robotic arms and other instruments.
The first area of real interest that the team wants to study is the Glenelg area, farther east. The science team said the Glenelg region should provide a good target for Curiosity’s first analysis of powder collected by drilling into a rock.
How long will it take to get to Glenelg? It is about 400 meters away, and the rover is about a quarter of the way there so far.
“If you drove every day and didn’t do the context science it would take a couple of weeks to drive to Glenelg, at 30-40 meters a day,” said Matt Robinson, lead engineer for Curiosity’s robotic arm testing and operations. “But I think we will stop and do the context science. My guess is it will be a few weeks before we get to Glenelg.
The drive to Mt. Sharp, which is about 8 km away, will take much longer, months, maybe even a year.
“If we use our full driving mode and do up to one hundred meters a day, and not stop, it would take about 3 months,” said Robinson, “but we might only be driving for one-half to one-third of the time, it depends on how interesting the terrain is along the way.”
This scene shows the surroundings of the location where NASA Mars rover Curiosity arrived on the 29th Martian day, or sol, of the rover’s mission on Mars (Sept. 4, 2012). It is a mosaic of images taken by Curiosity’s Navigation Camera (Navcam) following the Sol 29 drive of 100 feet (30.5 meters). Tracks from the drive are visible in the image. For scale, Curiosity leaves parallel tracks about 9 feet (2.7 meters) apart. At this location on Sol 30, Curiosity began a series of activities to test and characterize the rover’s robotic arm and the tools on the arm.
The panorama is centered to the north-northeast, with south-southwest at both ends.
Image credit: NASA/JPL-Caltech
The view of Curiosity’s surroundings is fascinating to both Mars enthusiasts and the scienctists.
Joy Crisp, the deputy project scientist for the mission said two main things have intrigued her. “One is the Mastcam imaging of Mt. Sharp, seeing structures and layers. The other is the amazing rock textures. Some rocks have light-toned grains mixed in a dark matrix. We need to examine rocks like those more thoroughly.”
“That’s what’s been exciting, to see things we haven’t seen before on Mars,” Crisp added.
Unless you’ve been living under a rock — Earth or Martian — in the past month, surely you have heard about the Curiosity rover’s landing and early adventures on Mars.
The prospects for what the rover could find has many in the space community very excited, even though Curiosity is supposed to look for habitable environments, not life itself.
However, a couple of weeks ago, noted theoretical physicist Lawrence Krauss said he wouldn’t be surprised if we do find evidence of life on Mars.
In an interview with CNN, Krauss said it’s possible Martian life could have “polluted” Earth early in our planet’s history, giving rise to life as we know it today.
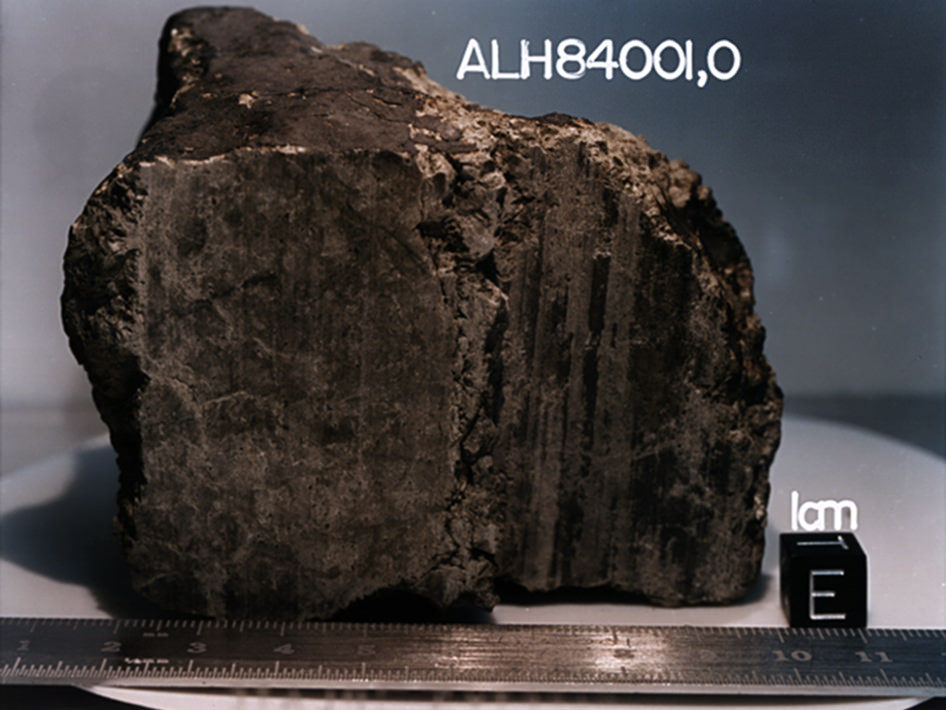
The big surprise (in finding life) would be if it weren’t our cousins. Because what we’ve learned is that material goes back and forth between the planets all the time. We have discovered Martian meteorites in Antarctica, for example, and it goes the other way around, and microbes certainly (can) survive the the eight-month voyage in a rock.
Though Krauss did not specify which meteorites in Antarctica he was referring to, he is most likely talking about ALH84001, which was found in 1984.
The meteorite shot to international prominence in 1996 when scientists, led by NASA’s David McKay, published an article in the journal Science saying there was evidence the meteorite showed “primitive bacterial life” from Mars. In particular, they used a high-power electron microscope and found formations that they said are consistent with those caused by bacterial life.
The team’s proclamation met with scientific skepticism. The Lunar and Planetary Institute’s Allan Treiman said even if it did show evidence of life, the rocks could have been contaminated by Antarctic life or by handling of the meteorite after it was found.
John Bradley, an adjunct professor at the Georgia Institute of Technology, took his skepticism a step further: “Unfortunately, there are many signatures in the fossil record here on Earth, and probably on Mars, that look very similar to bacterial signatures. But they are not unique to bacterial processes,” he said in an undated NASA page (most likely from 2001, since it references a meeting from that time) that was reportedly based on a SPACE.com story.
NASA revisited the sample in 2009 with more advanced equipment and argued that life was the most plausible explanation for the formations. In a paper published in Geochimica et Cosmochimica Acta, the authors rejected the alternate hypotheses of shock or heating affecting the meteorite based on their experiments.
That said, the 1996 announcement is still a long way from confirmation. Krauss’ interview is below. What do you think of his views of Martian life?
Lead image courtesy of NASA.
Elizabeth Howell (M.Sc. Space Studies ’12) is a contributing editor for SpaceRef and award-winning space freelance journalist living in Ottawa, Canada. Her work has appeared in publications such as SPACE.com, Air & Space Smithsonian, Physics Today, the Globe and Mail, the Canadian Broadcasting Corp., CTV and the Ottawa Business Journal.
Today’s Astronomy Picture of the Day (APOD) features a mosaic put together in part by Universe Today’s Ken Kremer, along with his imaging partner Marco Di Lorenzo, using images sent back from the Curiosity rover. It shows Curiosity’s landing site, Bradbury Landing, with its ultimate destination, Aeolis Mons/Mount Sharp off in the distance. It’s a beautiful and crisp image, which show parts of the rover itself — including the extended robotic arm — and its shadow on Mars. As the APOD editors Robert Nemiroff and Jerry Bonnell say, “If life ever existed on Mars it might well have been here in Gale crater, with the Curiosity rover being humanity’s current best chance to find what remains.”
Congrats to Ken and Marco for being featured on APOD!
This week, Torsten Zorn, MSL Tacticle Downlink Lead, provides an video update on the Curiosity rover’s activities. It’s been a week of firsts — flexing the rover’s robotic arm, zapping with its laser and giving the roving wheels their first workout. The video provides a great look at the rover’s landing site, named for author Ray Bradbury on the day that would have been his 92nd birthday.
Bradbury Landing color panorama. Credit: NASA/JPL-Caltech/Malin Space Science Systems. with image editing by James Canvin.
The image editing wizards at UnmannedSpaceflight are having a field day with all the sensational views being sent back by the Curiosity rover. Above is a beautiful color 360-degree panoramic view edited by James Canvin of the newly named “Bradbury Landing,” Curiosity’s landing place. The view of Aeolis Mons (Mount Sharp) is simply stunning, along with parts of (and shadows of) the rover itself. Click on the image to have access to larger views. James said he added the latest downloads from Curiosity in order to show the top of Aeolis Mons, and extended the sky to make the view complete.
See more views, below:
Aeolis Mons/Mount Sharp. Credit: NASA/JPL-Caltech/image editing by Stuart Atkinson
Here’s a view focusing on just Aeolis Mons by Stuart Atkinson at his wonderful Gale Gazette website, which highlights Curiosity’s latest explorations. He said he “boosted” the colors “just a bit, to bring out some detail.” Click on any of these images to see larger versions from Stu to see more detail — one could spend hours looking at the all the features! And presumably, the MSL science team is doing just that!
And there’s more detail from another image enhanced by Stu, a closeup of one part of the huge mountain in the center of Gale Crater, Curiosity’s ultimate destination for exploration:
The “Promised Land” at the base of Aeolis Mons. Credit: NASA/JPL-Caltech/image editing by Stuart Atkinson
Just look at this intriguing area of mesas and buttes that Curiosity will one day, hopefully be able to explore!
A view of Curiosity and the first tracks left by this rover on Mars. Credit: NASA/JPL-Caltech.
Now it’s time to grab your 3-D glasses to appreciate a the great view from Curiosity!
3-D view of Curiosity’s tracks. NASA/JPL-Caltech/image editing by Stuart Atkinson
3-D view of wheel tracks left by the Curiosity rover on Mars, as captured by the rover’s hazard avoidance cameras. Credit: NASA/JPL-Caltech/Stuart Atkinson
Thanks to Stuart and James and all the UnmannedSpaceflight image editing wizards for providing us all a better appreciation of the location and views from Curiosity’s new science spot. We look forward to more images as they become available! You can see all the raw images straight from Curiosity here.
Adam Steltzner and another Curiosity team member celebrate the successful landing. Credit: NASA/Bill Ingalls.
I admit, I’ve lost count of how many times I’ve watched the great “trailer” JPL put out showing the events in the mission control room during the Entry, Descent and Landing of the Curiosity rover, which also simultaneously provides animations of what took place on Mars. Watching it usually evokes either 1.) a fist pump, or 2.) choking up.
But if you’ve seen the video, or if you were watching live the night of the landing, just what were all those acronyms and phrases being thrown around and what did they mean? And what was the ever-pacing Adam Steltzner (EDL team leader) hearing in his headphones that made him stop, turn around and point just before spacecraft communicator Allen Chen said, “Touchdown confirmed!” … wherein bedlam ensued?
JPL has put out some info about what all was going on behind the scenes. It turns out the words “UHF Strong,” were highly anticipated by the team, plus there was a bit of acronym trickery employed by the team just so there wasn’t any doubt among them what was going on.
There had been a debate among Curiosity’s ELD team about what their first words to indicate that the rover had reached the surface should be. They knew their microphones would be “hot” and that NASA TV was beaming the landing event out live to everyone watching.*
But they also knew that landing safely on Mars meant more than simply landing on Mars – which any one of the 34 engineers present at JPL’s Building 264 Room 230, also known as the “EDL War Room,” will tell you at great length is not simple at all. Their rocket-propelled backpack and rover-lowering Sky Crane system were getting their first all-up test 154 million miles (248 million kilometers) away from home, and there was still plenty that could go wrong even after the rover was gently placed on the surface… plenty.
What if the descent stage kept descending right on top of the rover? What if the bridles connecting the two did not separate? What if the algorithm used to throttle up the engines for the flyaway maneuver was not accurate?
It was the remaining “what ifs” that made what those first words from Mars confirming the rover was on the surface so important.
“If we said ‘touchdown,’ then people not intimately familiar with EDL might infer that Curiosity was good to go,” said engineer Steve Sell. “But two more major calls had to be made before I could begin to breathe again.”
At 10:31:45 p.m. PDT, Jody Davis saw the event record, or EVR, she was looking for appear on her computer screen in the EDL War Room. She knew that the “Touchdown” EVR would only be beamed down if the rover’s descent stage had throttled down — a result which could only occur if the descent stage had offloaded half its weight. The only way the rover could offload half its weight in an instant is if it were being held up from below.
Davis, a member of the EDL team and an engineer from NASA Langley Research Center in Virginia, gave the much reviewed, pre-scripted call — “Tango Delta nominal.”
Tango and Delta are phonetic identifiers for T and D, which the team used to represent touchdown.
One down, two to go, thought Sell. The next call the EDL team was looking for was “RIMU Stable.”
“RIMU stands for Rover Inertial Measurement Unit,” said Sell. “The RIMU gives us the rover’s orientation as well as any movement it is making. If we landed on a crumbling crater wall or an unstable sand dune, or were being dragged by a still-connected descent stage across the surface, then the RIMU would show that in its data set.”
The War Room’s David Way, an engineer from JPL, was monitoring that unit’s performance. Eight long seconds after Jody’s call, he found the EVR he was looking for.
“RIMU Stable,” said Way.
One more crucial milestone to go.
This image shows Curiosity’s Entry, Descent and Landing (EDL) “war room” and its staff. On the night of Aug. 5, 2012 PDT (early morning Aug. 6 EDT), 34 engineers gathered in this room at NASA’s Jet Propulsion Laboratory, Pasadena, Calif., to support the landing. Image credit: NASA/JPL-Caltech
Not receiving that one final call would be something of a long shot to be sure. After all, the rover was down on the ground, and RIMU indicated it wasn’t moving. Their system had been proven every step of the way so far. But everyone in the EDL War Room got as far as they did not only because they were excellent engineers, but because of their predilection for concocting unappetizing entry, descent and landing scenarios – and then figuring out how to elude them. And one ton of fuel-laden, rocket-firing descent stage climbing straight up, only to fall right back down on their factory-fresh landing site and an otherwise good-to-go, roving Mars laboratory was about as unappetizing a scenario as Sell could imagine.
That final confirmation would not come from Sell’s location. The final confirmation that Curiosity had landed clean would come 200 yards and one building away from the EDL War Room. There, in the Mission Support Area of JPL’s Building 230, Adam Steltzner, the mission’s EDL phase lead, was staring across the room at Brian Schwartz, who was not making eye contact with anyone. Schwartz, the EDL communications engineer, was staring at his screen. His task was not to check for a good-news EVR from the rover. Instead, he was waiting to see if the UHF signal became intermittent, faded away or just cut out altogether – all potential indications that the rover and descent stage had not gone their separate ways.
Eight seconds after the RIMU call – Schwartz looked up.
“UHF strong,” said Schwartz.
With that, Steltzner had all the data he needed. Seated directly in front of the pacing EDL Phase Lead, Allen Chen felt a jab in the shoulder. Chen, the mission’s (capsule communicator), knew it could only mean one thing.
“Touchdown confirmed,” said Chen.
Bedlam and joy.
Mars Science Laboratory (MSL) Entry, Descent and Landing Engineer Adam Steltzner reacts after the Curiosity rover successfully landed on Mars on Sunday, Aug. 5, 2012. Photo Credit: (NASA/Bill Ingalls)
Via Twitter, Steltner told Universe Today that when you see him in the video holding up four fingers, he was actually “counting the seconds waiting for UHF confirmation from Brian Schwartz. I think my fingers were me counting down,” he said.
How did the JPL team know what was happening on Mars? — (there was a 13.8 minute radio delay because of the distance between Earth and Mars).
MSL sent out different tones for each event that happened, and 128 distinct tones indicated when steps in the process were activated; one sound indicated the parachute deployed, while another signaled that the vehicle was in powered flight, and still another that the Sky Crane had been activated. These sounds were a series of basic, special individual radio tones.
They were simple tones, transmitted in X-band, comparable to semaphore codes, rather than full telemetry. The Deep Space Network listened for these direct-to-Earth transmissions. However, Earth went out of view of the spacecraft, “setting” below the Martian horizon, partway through the descent, so the X-band tones were not available for confirming the final steps in descent and landing. By then, the bent-pipe relay of telemetry via the Odyssey spacecraft had begun.
Also listening was the Mars Express spacecraft. It recorded about 20 minutes of the rover’s transmissions and tones. ESA engineers have now put together an audio reproduction, compressing the 20 minutes into about 19 seconds of audio that humans can hear that are a “faithful reproduction of the ‘sound’ of the NASA mission’s arrival at Mars and its seven-minute plunge to the Red Planet’s surface,” the European Space Agency team wrote. You can listen to the audio here.
And if you need to watch the landing trailer one more time, here it is:
*Estimates are that at least 3.2 million people were watching online on JPL’s UStream feed. Universe Today’s Live Hangout on Air Virtual Landing Party had a total of 30,000 viewers, with a peak of 7,000 concurrent viewers. This CNET article says that at the peak, 500,000 people were simultaneously watching the live landing on NASA’s HDTV, JPL, and JPL 2 broadcasts via Ustream. While numbers like this aren’t available for TV, Mashable cites research firm Nielsen’s ratings for the night — CNN had 426,000 viewers, MSNBC had 365,000, and Fox came in the highest with 803,000 — which overall have lower numbers than Ustream.
An overhead view of the tracks of Curiosity’s first drive on Mars, taken by the rover’s Mastcam. Credit: NASA/JPL-Caltech
Any rover only gets one ‘first’ drive, and this historic moment has now occurred for the Curiosity Mars rover. “These are historic photos,” said rover driver Matt Heverly, “since there is only one place where your tracks start.”
“It is a really big moment,” said Curiosity Project Manager Pete Theisinger. “We built a rover. Unless the rover roves, we haven’t really accomplished anything.”
This 360-degree panorama shows evidence of a successful first test drive for NASA’s Curiosity rover. On Aug. 22, 2012, the rover made its first move, going forward about 15 feet (4.5 meters), rotating 120 degrees and then reversing about 8 feet (2.5 meters). Curiosity is about 20 feet (6 meters) from its landing site, now named Bradbury Landing. Credit: NASA/JPL-Caltech
And the place where Curiosity departed from now has a new name: Bradbury Landing, named after science fiction writer Ray Bradbury, who would have been 92 today (August 22, 2012).
“This was not a difficult choice for the science team,” said Michael Meyer, program scientist for Curiosity. “Many of us and millions of other readers were inspired in our lives by stories Ray Bradbury wrote to dream of the possibility of life on Mars.”
Curiosity’s first drive was short, but important. “We have a fully functioning mobility system,” Heverly said, adding that the key things about the drive were full revolution of the drivers in forward movement, turning, and back up, plus full revolution of drive actuators, and good data about how the rover perceives its motion. “We’re excited to have this milestone behind us,” he said, “ and it looks like we’re in a great place to do science.”
At a press conference today, Heverly showed an animation (you can see it here) derived from visualization software used for planning the first drive and said the drive took 16 minutes. But only about 4-5 minutes of that was actual driving, as most of the time was spent imaging.
Here’s a video of the team receiving the images:
Heverly said the drive took the rover forward 90 cm, then continued on for a total of 4.5 meters, then at that point took a 120 degree turn around, then backed up 2.5 meters.
The drive occurred at 14:17 UTC (10:17 EDT) today.
The first laser spectrum from the Chemistry and Camera (ChemCam) instrument on NASA’s Curiosity rover. Credit: NASA/JPL-Caltech/LANL/CNES/IRAP
Roger Wiens from the ChemCam team released the first spectrum from “Coronation,” the first rock zapped by Curiosity’s laser and analyzed by the ChemCam instrument. The plot shows emission lines from different elements present in the target, and Wiens said hydrogen showed up initially, but not in later views, meaning that there must have been hydrogen on the surface of the rock.
Weins said they’ve done some more laser shots, and received data from Goldbrun Scour, a place where the skycrane’s thruster dug in and uncovered a small rock outcrop, which appears to be bedrock, since it is layered. But all the rocks so far look to be basalts, which is not surprising, since basalts make up the majority of Mars’ surface.
Curiosity will now be taking what the team called an “intermission” of a few days to a week, where the scientists take a few days to check out the instruments and study the surroundings in more detail before doing any more driving.
“Curiosity is a much more complex vehicle than earlier Mars rovers. The testing and characterization activities during the initial weeks of the mission lay important groundwork for operating our precious national resource with appropriate care,” said Theisinger. “Sixteen days in, we are making excellent progress.”
But Theisinger also cautioned about being too triumphant about what the rover has accomplished in its short time on Mars.
“We are 16 days into a two-year mission.” he said. “We haven’t exercised our sample gathering ability, which is key. As good as it has gone, we’ve only checked off about 2 boxes of the level one requirements – launch on time and land on Mars. But the fact that we haven’t had any early problems is fantastic. But we do need to manage expectations, be prudent and not get ahead of ourselves.”
The next driving destination is an area called Glenelg, approximately 1,300 feet (400 meters) to the east-southeast, where the team can already see three different types of enticing terrain intersecting in one spot.
“When we finally get to Glenelg, we want to study the outcrop there and take a look at the context between the three different terrain types and maybe there is where we would decide to do our first drilling into rock,” said Joy Crisp, the deputy project scientist. “And after Glenelg, we head for Mount Sharp. That will be a much longer drive with probably a few brief stops along the way. That’s going to take several months before we get to that point.”
The rover (and her driving team) has done it! Curiosity has taken a little jaunt inside Gale Crater and here is an image of the wheel tracks to prove it! This image was taken by the right Navigation Camera on the rover Curiosity on Sol 16 (2012-08-22 15:00:53 UTC).
It keeps getting better! This is a full-resolution version of the NASA Curiosity rover descent to Mars, taken by the MARDI descent imager. This video, put together by Daniel Luke Fitch, uses all but a dozen of the full resolution 1600×1200 frames (some haven’t been uploaded from the rover yet). The result is a mind-blowing, HD view of Curiosity’s view as it landed — and it also shows the best views yet of the heat shield impact. Wow!