Looking up from beneath the enlarged exhaust hole of the Mobile Launcher to the 380 foot-tall tower astronauts will ascend as their gateway for missions to the Moon, Asteroids and Mars. The ML will support NASA’s Space Launch System (SLS) and Orion spacecraft during Exploration Mission-1 at NASA’s Kennedy Space Center in Florida. Credit: Ken Kremer/kenkremer.com
Story/photos updated[/caption]
KENNEDY SPACE CENTER, FL – NASA’s Mobile Launcher (ML) is undergoing major upgrades and modifications at the Kennedy Space Center in Florida enabling the massive structure to launch the agency’s mammoth Space Launch System (SLS) rocket and Orion crew capsule on a grand ‘Journey to Mars.’
“We just finished up major structural steel modifications to the ML, including work to increase the size of the rocket exhaust hole,” Eric Ernst, NASA Mobile Launch project manager, told Universe Today during an exclusive interview and inspection tour up and down the Mobile Launcher.
Indeed the Mobile Launcher is the astronauts gateway to deep space expeditions and missions to Mars.
Construction workers are hard at work upgrading and transforming the 380-foot-tall, 10.5-million-pound steel structure into the launcher for SLS and Orion – currently slated for a maiden blastoff no later than November 2018 on Exploration Mission-1 (EM-1).
“And now we have just started the next big effort to get ready for SLS.”
SLS and Orion are NASA’s next generation human spaceflight vehicles currently under development and aimed at propelling astronauts to deep space destinations, including the Moon and an asteroid in the 2020s and eventually a ‘Journey to Mars’ in the 2030s.

The mobile launcher was originally built several years ago to accommodate NASA’s less powerful, lighter and now cancelled Ares-1 rocket. It therefore requires extensive alterations to accommodate the vastly more powerful and heavier SLS rocket.
“The ML was initially developed for Ares 1, a much smaller rocket,” Ernst explained to Universe Today.
“So the exhaust hole was much smaller.”
Whereas the Ares-1 first stage booster was based on using a single, more powerful version of the Space Shuttle Solid Rocket Boosters, the SLS first stage is gargantuan and will be the most powerful rocket the world has ever seen.
The SLS first stage comprises two shuttle derived solid rocket boosters and four RS-25 power plants recycled from their earlier life as space shuttle main engines (SSMEs). They generate a combined 8.4 million pounds of thrust – exceeding that of NASA’s Apollo Saturn V moon landing rocket.
Therefore the original ML exhaust hole had to be gutted and nearly tripled in width.
“The exhaust hole used to be about 22 x 22 feet,” Ernst stated.
“Since the exhaust hole was much smaller, we had to deconstruct part of the tower at the base, in place. The exhaust hole had to be made much bigger to accommodate the SLS.”
Construction crews extensively reworked the exhaust hole and made it far wider to accommodate SLS compared to the smaller one engineered and already built for the much narrower Ares-1, which was planned to generate some 3.6 million pounds of thrust.
“So we had to rip out a lot of steel,” Mike Canicatti, ML Construction Manager told Universe Today.
“For the exhaust hole [at the base of the tower], lots of pieces of [existing] steel were taken out and other new pieces were added, using entirely new steel.”
“The compartment for the exhaust hole used to be about 22 x 22 feet, now it’s about 34 x 64 feet.”
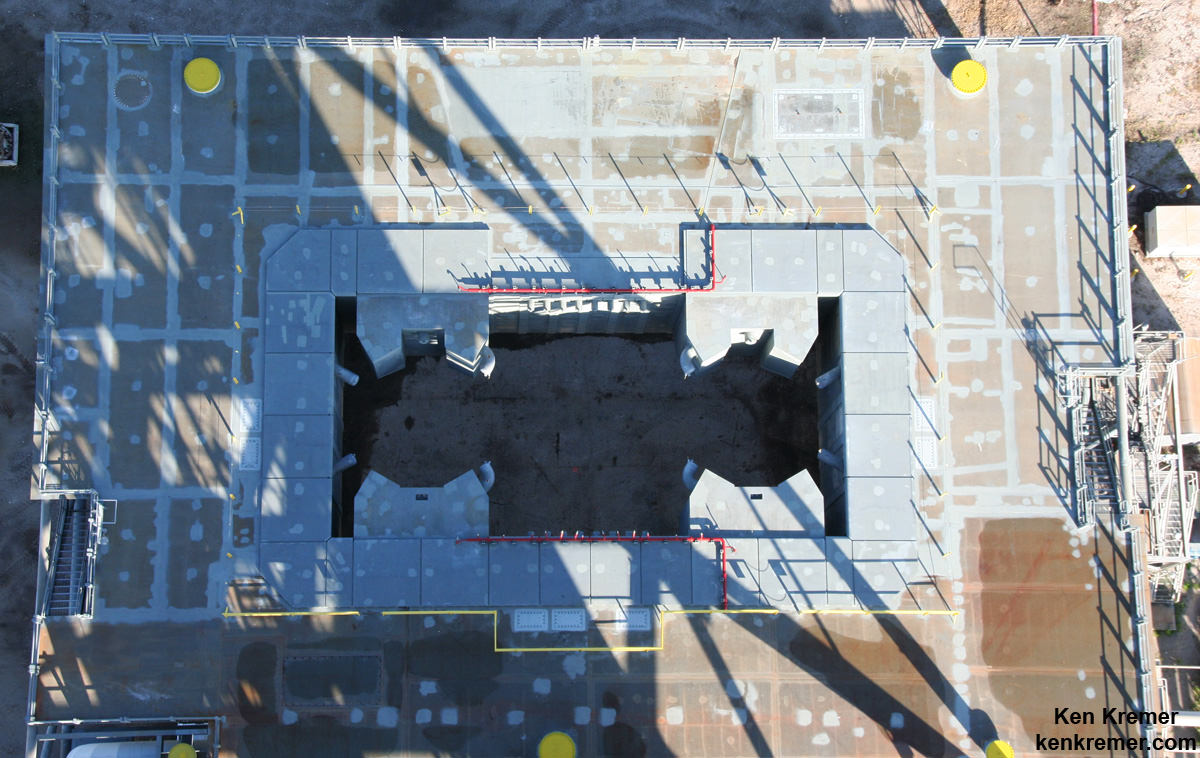
In fact this involved the demolition of over 750 tons of old steel following by fabrication and installation of more than 1,000 tons of new steel. It was also reinforced due to the much heavier weight of SLS.
“It was a huge effort and structural engineers did their job. The base was disassembled and reassembled in place” – to enlarge the exhaust hole.
“So basically we gutted major portions of the base out, put in new walls and big structural girders,” Ernst elaborated.
“And we just finished up that major structural steel modification on the exhaust hole.”

Meanwhile the 380 foot-tall tower that future Orion astronauts will ascend was left in place.
“The tower portion itself did not need to be disassembled.”

The Ares rockets originally belonged to NASA’s Constellation program, whose intended goal was returning American astronauts to the surface of the Moon by 2020.
Ares-1 was slated as the booster for the Orion crew capsule. However, President Obama cancelled Constellation and NASA’s Return to the Moon soon after entering office.
Since then the Obama Administration and Congress worked together in a bipartisan manner together to fashion a new space hardware architecture and granted approval for development of the SLS heavy lift rocket to replace the Ares-1 and heavy lift Ares-5.
Sending astronauts on a ‘Journey to Mars’ is now NASA’s agency wide and overarching goal for the next few decades of human spaceflight.
But before SLS can be transported to its launch pad at Kennedy’s Space Launch Complex 39-B for the EM-1 test flight the next big construction step has to begin.
“So now we have just started the next big effort to get ready for SLS.”
This involves installation of Ground Support Equipment (GSE) and a wide range of launch support services and systems to the ML.
“The next big effort is the GSE installation contract,” Ernst told me.
“We have about 40+ ground support and facility systems to be installed on the ML. There are about 800 items to be installed, including about 300,000-plus feet of cable and several miles of piping and tubing.”
“So that’s the next big effort to get ready for SLS. It’s about a 1.5 year contract and it was just awarded to J.P. Donovan Construction Inc. of Rockledge, Florida.”
“The work just started at the end of August.”
NASA currently plans to roll the ML into the Vehicle Assembly Building in early 2017 for stacking of SLS and Orion for the EM-1 test flight.

The SLS/Orion mounted stack atop the ML will then roll out to Space Launch Complex 39B for the 2018 launch from the Kennedy Space Center.
Pad 39B is also undergoing radical renovations and upgrades, transforming it from its use for NASA’s now retired Space Shuttle program into a modernized 21st century launch pad. Watch for my upcoming story.

Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.