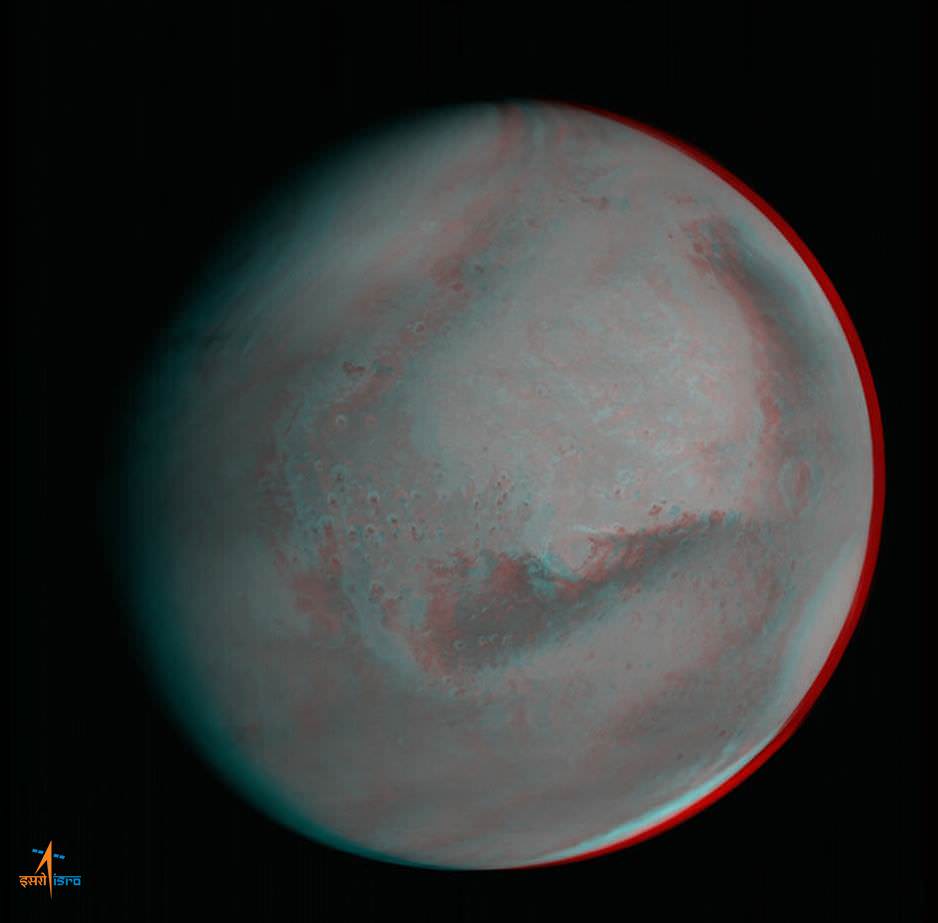
3-D image of Mars generated from multiple pictures acquired by Mars Color Camera on-board Mars Orbiter Spacecraft on Sept 28, 2014. Credit: ISRO
Here’s another breathtakingly glorious view from India’sMars Orbiter Mission (MOM) – her first global 3-D portrait of her new home careening around the Red Planet.
MOM is India’s first deep space voyager to explore beyond the confines of her home planet’s influence and just successfully arrived at the Red Planet after the “history creating” orbital insertion maneuver on Sept. 23/24 following a ten month journey.
This newly released 3-D view from MOM expands upon the initial 2-D global color view of Mars released by the Indian Space Research Organization (ISRO), India’s space agency. See below and detailed in my earlier story – here.
The 3-D image was generated from multiple pictures acquired by MOM’s on-board Mars Color Camera on Sept 28, 2014, from the very high altitude of approximately 74,500 kilometers as the spacecraft orbits Mars.
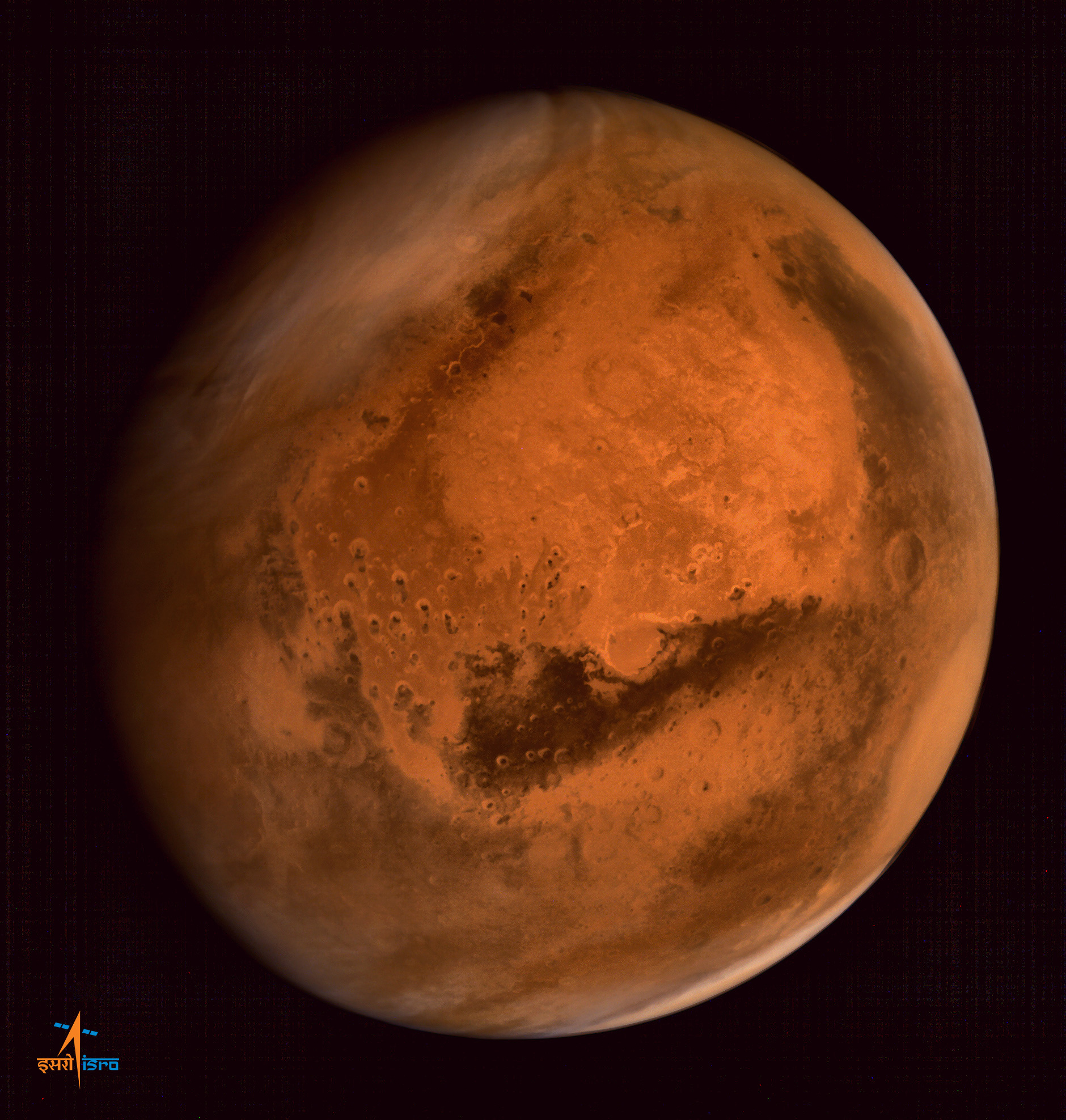
ISRO’s Mars Orbiter Mission captures spectacular portrait of the Red Planet and swirling dust storms with the on-board Mars Color Camera from an altitude of 74,500 km on Sept. 28, 2014. Credit: ISRO
The images were taken by the tri-color camera as MOM swooped around the Red Planet in a highly elliptical orbit whose nearest point to Mars (periapsis) is at 421.7 km and farthest point (apoapsis) at 76,993.6 km, according to ISRO.
Therefore, the 3-D Red Planet portrait was captured nearly at apoapsis. And being three dimensional, it gives a stereo sense of the huge dust storm swirling over a large swath of the planet’s Northern Hemisphere set against the blackness of space.
Below right is the southern polar ice cap. To see the 3-D effect, whip out your handy pair of left-eye red, right-eye blue color anaglyph glasses.
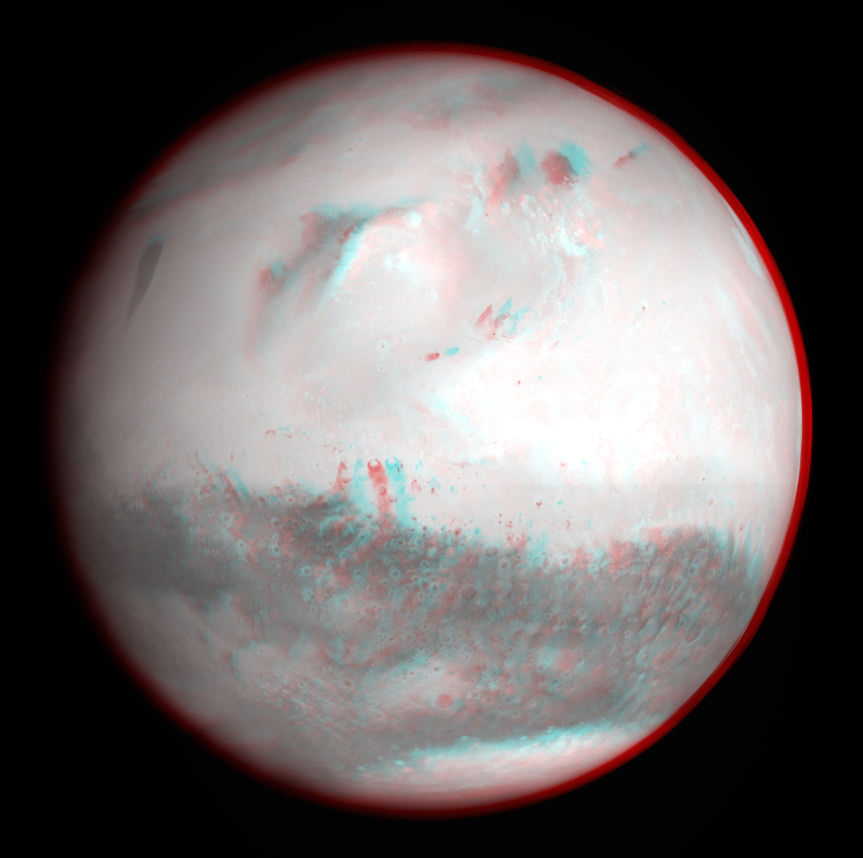
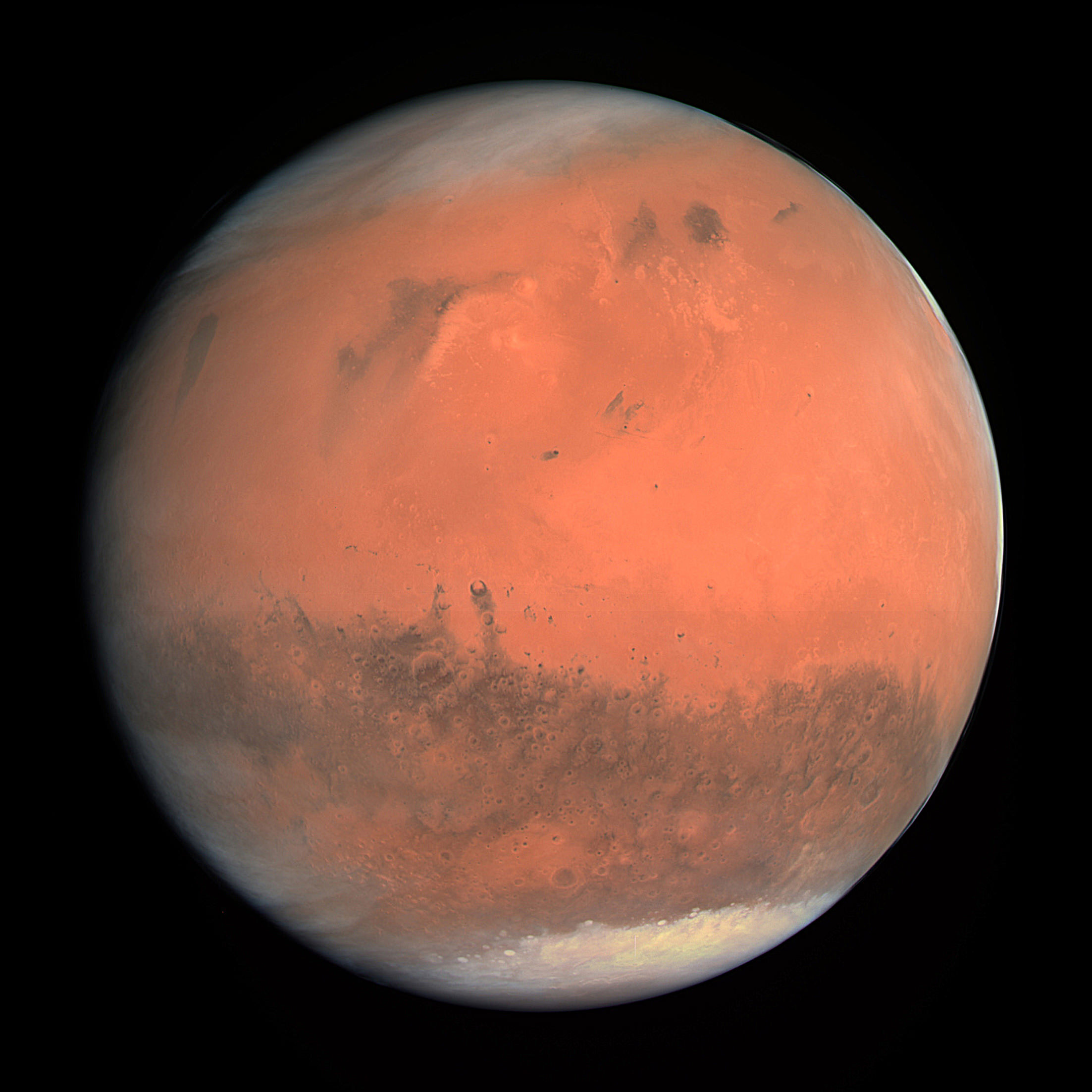
And while we’re on the subject of spacely 3-D, it’s worth noting that another of humanity’s ground breaking probes currently making news – ESA’s comet hunting Rosetta probe – likewise snapped a glorious 3-D view of Mars way back in 2007, during the brief, but critical, gravity assist slingshot maneuver that flung Rosetta along her vast 10 year path through interplanetary space.
So by way of comparison let’s take a trip down memory lane and be sure to look back at Rosetta’s global 3-D Martian views (below) taken by the high resolution OSIRIS camera on 24 February 2007 at 19:28 CET from a distance of about 240,000 kilometers.
Mars 3-D anaglyph (black & white) taken by ESA’s Rosetta spacecraft during Mars flyby on 24 February 2007 from a distance of about 240,000 km. Image resolution is about 5 km. Credit: MPS for OSIRIS Team MPS/UPD/LAM/ IAA/ RSSD/ INTA/ UPM/ DASP/ IDA
The Rosetta team created both color and black & white 3-D views of Mars.
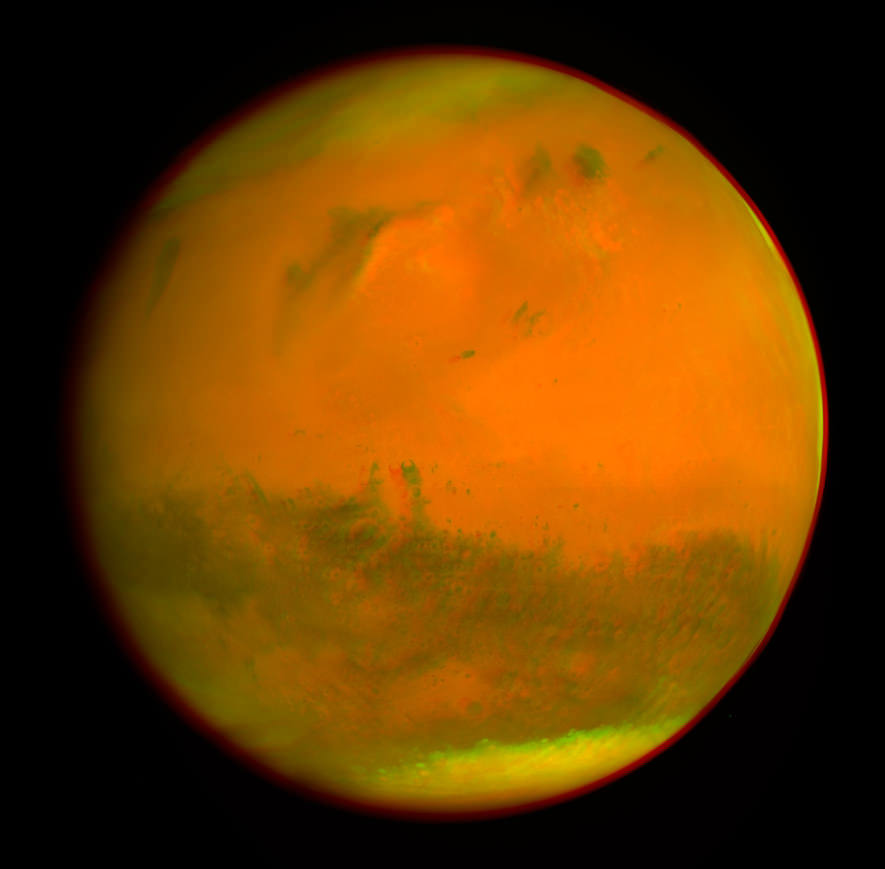
Mars 3-D anaglyph (color) taken by ESA’s Rosetta spacecraft during Mars flyby on 24 February 2007 from a distance of about 240,000 km. Image resolution is about 5 km. Credit: MPS for OSIRIS Team MPS/UPD/LAM/ IAA/ RSSD/ INTA/ UPM/ DASP/ IDA
And be sure to check out Rosetta’s 2-D true color view showing a different swatch of the Red Planet compared to MOM, along with a more expansive view of the southern polar ice cap.
The first true-color image of Mars from ESA’s Rosetta generated using the OSIRIS orange (red), green and blue color filters. The image was acquired on 24 February 2007 at 19:28 CET from a distance of about 240,000 km; image resolution is about 5 km/pixel. Credit: MPS for OSIRIS Team MPS/UPD/LAM/ IAA/ RSSD/ INTA/ UPM/ DASP/ IDA
The $73 million MOM mission is expected to last at least six months.
MOM’s success follows closely on the heels of NASA’s MAVEN orbiter which also successfully achieved orbit barely two days earlier on Sept. 21 and could last 10 years or more.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Illustration of the Rosetta Missions Philae lander on final approach to a comet surface. (Photo: ESA)
ESA Rosetta mission planners have selected November 12th, one day later than initially planned, for the historic landing of Philae on a comet’s surface. The landing on 67P/Churyumov-Gerasimenko will be especially challenging for the washing machine-sized lander. While mission scientists consider their choice of comet for the mission to be an incredibly good one for scientific investigation and discovery, the irregular shape and rugged terrain also make for a risky landing. The whole landing is not unlike the challenge one faces in shooting a moving target in a carnival arcade game; however, this moving target is 20 kilometers below and it is also rotating.
At 8:35 GMT (3:35 AM EST), the landing sequence will begin with release of Philae by Rosetta at an altitude of 20 kilometers above the comet. The expected time of touchdown is seven hours later – 15:35 GMT (10:35 AM EST). During the descent, Philae’s ROLIS camera will take a continuous series of photos. The comet will complete more than half a rotation during the descent; comet P67’s rotation rate is 12.4 hours. The landing site will actually be on the opposite side of the comet when Philae is released and will rotate around, and if all goes as planned, meet Philae at landing site J.
Before November 12th, mission planners will maintain the option of landing at Site C. If the alternate site is chosen, the descent will begin at 13:04 GMT also on November 12 but from an altitude of 12.5 kilometers, a 4 hour descent time.
NAVCAM image of the comet on 21 September, which includes a view of primary landing site J. Click for more details and link to context image. (Credits: ESA/Rosetta/NAVCAM)
Rosetta will eject Philae with an initial velocity of approximately 2 1/2 kilometers per hour. Because the comet is so small, its gravity will add little additional speed to Philae as it falls to the surface. Philae is essentially on a ballistic trajectory and does not have any means to adjust its path.
The actions taken by Philae’s onboard computer begin only seconds from touchdown. It has a landing propulsion system but unlike conventional systems that slow down the vehicle for soft landing, Philae’s is designed to push the lander snugly onto the comet surface. There is no guarantee that Philae will land on a flat horizontal surface. A slope is probably more likely and the rocket will force the small lander’s three legs onto the slope.
A model of the comet P67/Churyumov-Gerasimenko created using images from the Rosetta OSIRIS narrow field camera. Mouse click on the image to start the animated GIF. (Credit: ESA)
Landing harpoons will be fired that are attached to cables that will be pulled in to also help Philae return upright and attach to the surface. Philae could actually bounce up or topple over if the rocket system and harpoons fail to do their job.
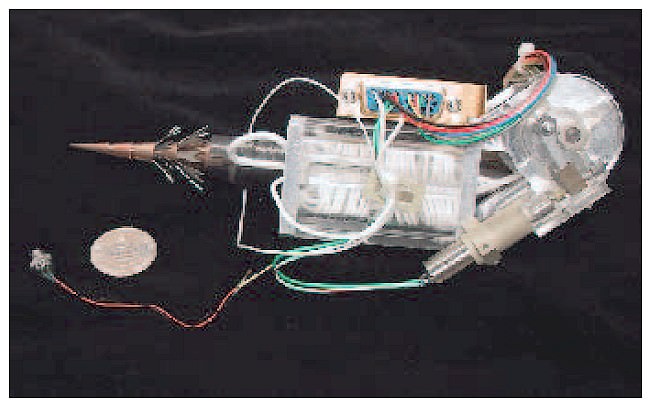
The Philae Lander anchoring harpoon with the integrated MUPUS-accelerometer and temperature sensor. (Credit: “Philae Lander Fact Sheet”, ESA)
However, under each of the three foot pads, there are ice screws that will attempt to drill and secure Philae to the surface. This will depend on the harpoons and/or rockets functioning as planned, otherwise the action of the drills could experience resistance from hard ground and simply push the lander up rather than secure it down. Philae also has a on-board gyro to maintain its attitude during descent, and an impact dampener on the neck of the vehicle which attaches the main body to the landing struts.
Ten landing sites were picked, then down-selected to five, and then finally on September 15th, they selected Site J on the head of the smaller lobe – the head of the rubber duck, with site C as a backup. Uncertainty in the release and the trajectory of the descent to the comet’s surface means that the planners needed to find a square kilometer area for landing. But comet 67P/Churyumov-Gerasimenko simply offered no site with that much flat area clear of cliffs and boulders. Philae will be released to land at Site J which offers some smooth terrain but only about a quarter of the area needed to assure a safe landing. Philae could end up landing on the edge of a cliff or atop a large boulder and topple over.
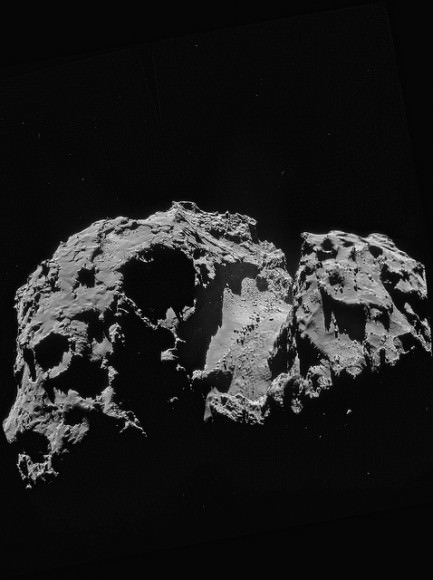
A ‘color’ view of Comet 67P, from a September 24, 2014 NavCam image. Credits: ESA/Rosetta/NavCam – Processing by Elisabetta Bonora & Marco Faccin.
The Rosetta ground control team will have no means of controlling and adjusting Philae during the descent. This is how it had to be because the light travel time for telecommunications from the spacecraft to Earth does not permit real-time control. The execution time and the command sequence will be delivered to Rosetta days before the November 12th landing. And ground control must maneuver Rosetta with Philae still attached to an exact point in space where the release of Philae must take place. Any inaccuracy in the initial release point will be translated all the way down to the surface and Philae would land some undesired distance away from Site J. However, ground controllers have a month and a half to practice simulations of the landing many times over with a model of the comet’s nucleus. With practice and more observational data between now and the landing, the initial conditions and model of the comet in the computer simulation will improve and raise the likelihood of a close landing to Site J.
Previous Universe Today articles on Rosetta’s Philae:
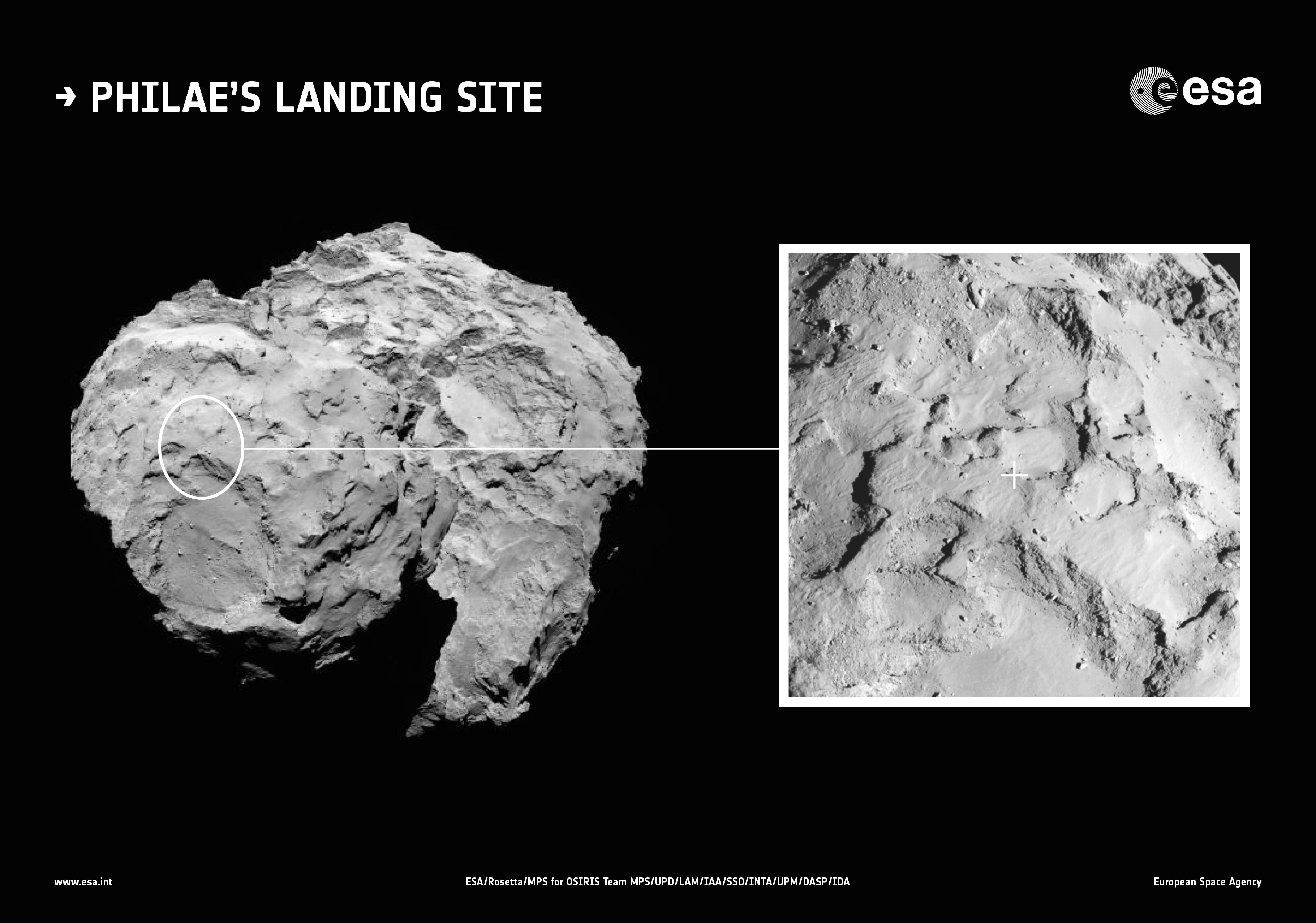
Context image showing the location of the primary landing site for Rosetta’s lander Philae. Site J is located on the head of Comet 67P/Churyumov–Gerasimenko. An inset showing a close up of the landing site is also shown. The inset image was taken by Rosetta’s OSIRIS narrow-angle camera on 20 August 2014 from a distance of about 67 km. The image scale is 1.2 metres/pixel. The background image was taken on 16 August from a distance of about 100 km. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Scientists leading the European Space Agency’s Rosetta mission announced the primary landing site at a media briefing today, Sept. 15, at ESA headquarters.
After weeks of detailed study and debate focused on balancing scientific interest with finding a ‘technically feasible’ and safe Philae touchdown site, the team chose a target dubbed Site J as the primary landing site from among a list of five initially selected sites, said Stephan Ulamec, Philae Lander Manager at the DLR German Aerospace Center, at the briefing.
“Site J is the primary landing site around the head of the comet,” Ulamec announced.
“Site C is the backup site on the body [near the bottom of the comet].”
“This was not an easy task. Site J is a mix of flat areas and rough terrain. It’s not a perfectly flat area. There is still risk with high slope areas.”
Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
He also made clear that there is still some landing uncertainty with the targeting of the lander onto the comet.
Site J is an intriguing region on Comet 67P/Churyumov–Gerasimenko that offers unique scientific potential, with hints of activity nearby, and minimum risk to the lander compared to the other candidate sites, according to ESA.
“As we have seen from recent close-up images, the comet is a beautiful but dramatic world – it is scientifically exciting, but its shape makes it operationally challenging,” says Ulamec.
“None of the candidate landing sites met all of the operational criteria at the 100% level, but Site J is clearly the best solution.”
Philae’s history-making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
“All of Rosetta’s instruments are supporting the landing site selection,” said Holger Sierks, principal investigator for Rosetta’s OSIRIS camera from the Max Planck Institute for Solar System Research in Gottingen, Germany.
“Site J is just 500-600 meters away from some pits and an area of comet outgassing activity. They will become more active as we get closer to the sun.
The team is in a race against time to select a suitable landing zone quickly and develop the complex landing sequence since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
Since the descent to the comet is passive it is only possible to predict that the landing point will place within a ‘landing ellipse’ typically a few hundred metres in size, the team elaborated.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 20 to 30 centimeters into and sample its incredibly varied surface.
“We will make the first ever in situ analysis of a comet at this site, giving us an unparalleled insight into the composition, structure and evolution of a comet,” says Jean-Pierre Bibring, a lead lander scientist and principal investigator of the CIVA instrument at the IAS in Orsay, France.
“Site J in particular offers us the chance to analyse pristine material, characterise the properties of the nucleus, and study the processes that drive its activity.”
“It’s amazing how much we have learned so far.”
“We are in a true revolution of how we think Planets form and evolve,” Bibring elaborated at the briefing.
“We will make many types of scientific measurements of the comet from the surface. We will get a complete panoramic view of the comet on the macroscopic and microscopic scale.”
Rosetta is currently orbiting the comet from a distance of 30 km, said ESA Rosetta flight director Andrea Accomazzo. He said it will likely go even closer to 20 km and perhaps 10 km.
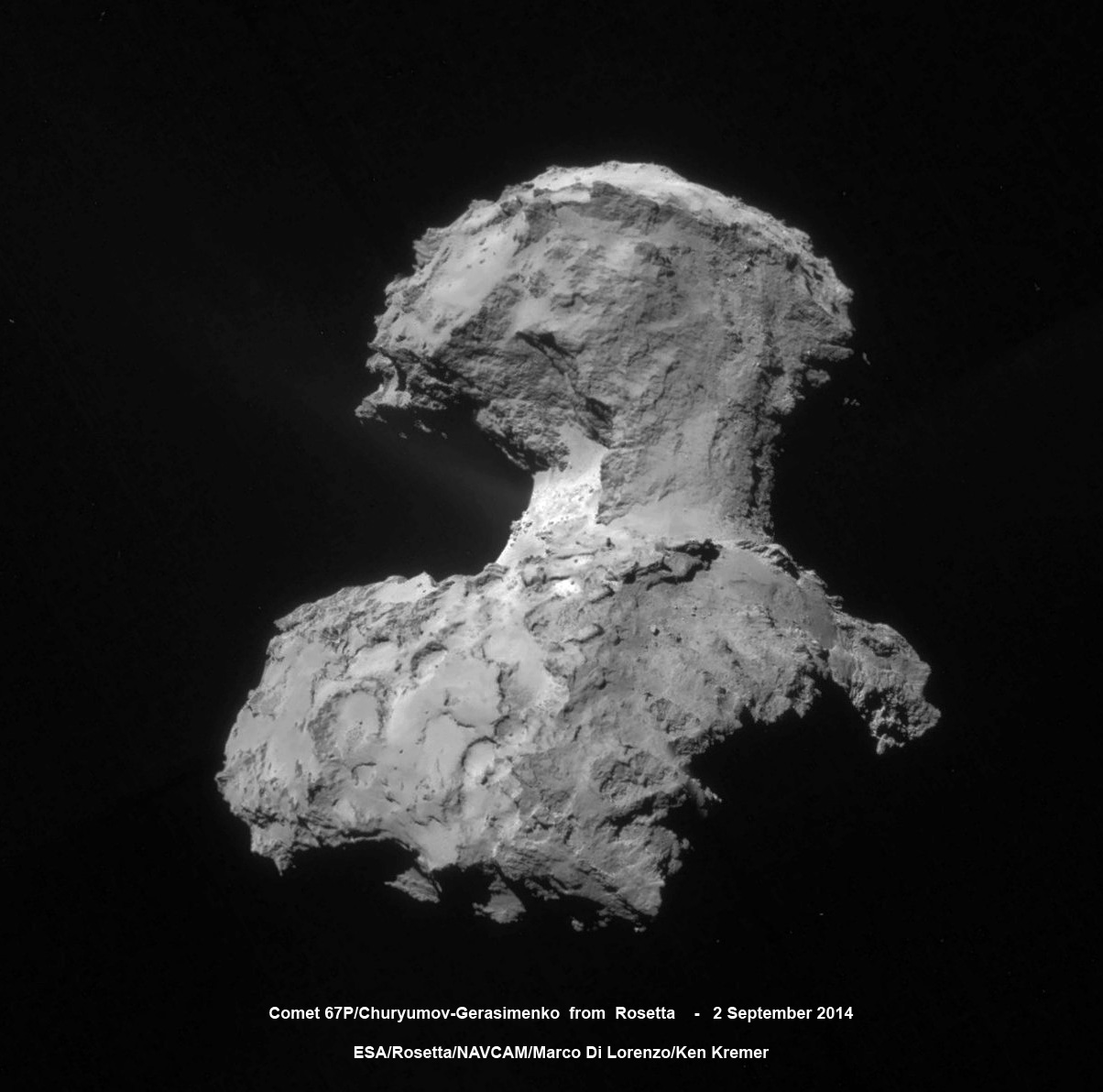
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 2 September 2014 from a distance of 56 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details of the coma, especially of jets of dust emanating from the neck region. Credits: ESA/Rosetta/NAVCAM/Marco Di Lorenzo/Ken Kremer – kenkremer.com
“Now that we’re closer to the comet, continued science and mapping operations will help us improve the analysis of the primary and backup landing sites,” says ESA Rosetta flight director Andrea Accomazzo.
“Of course, we cannot predict the activity of the comet between now and landing, and on landing day itself. A sudden increase in activity could affect the position of Rosetta in its orbit at the moment of deployment and in turn the exact location where Philae will land, and that’s what makes this a risky operation.”
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
The final landing site selections were made at a meeting being held this weekend on 13 and 14 September 2014 between the Rosetta Lander Team and the Rosetta orbiter team at CNES in Toulouse, France.
“No one has ever attempted to land on a comet before, so it is a real challenge,” says Fred Jansen, ESA Rosetta mission manager.
“The complicated ‘double’ structure of the comet has had a considerable impact on the overall risks related to landing, but they are risks worth taking to have the chance of making the first ever soft landing on a comet.”
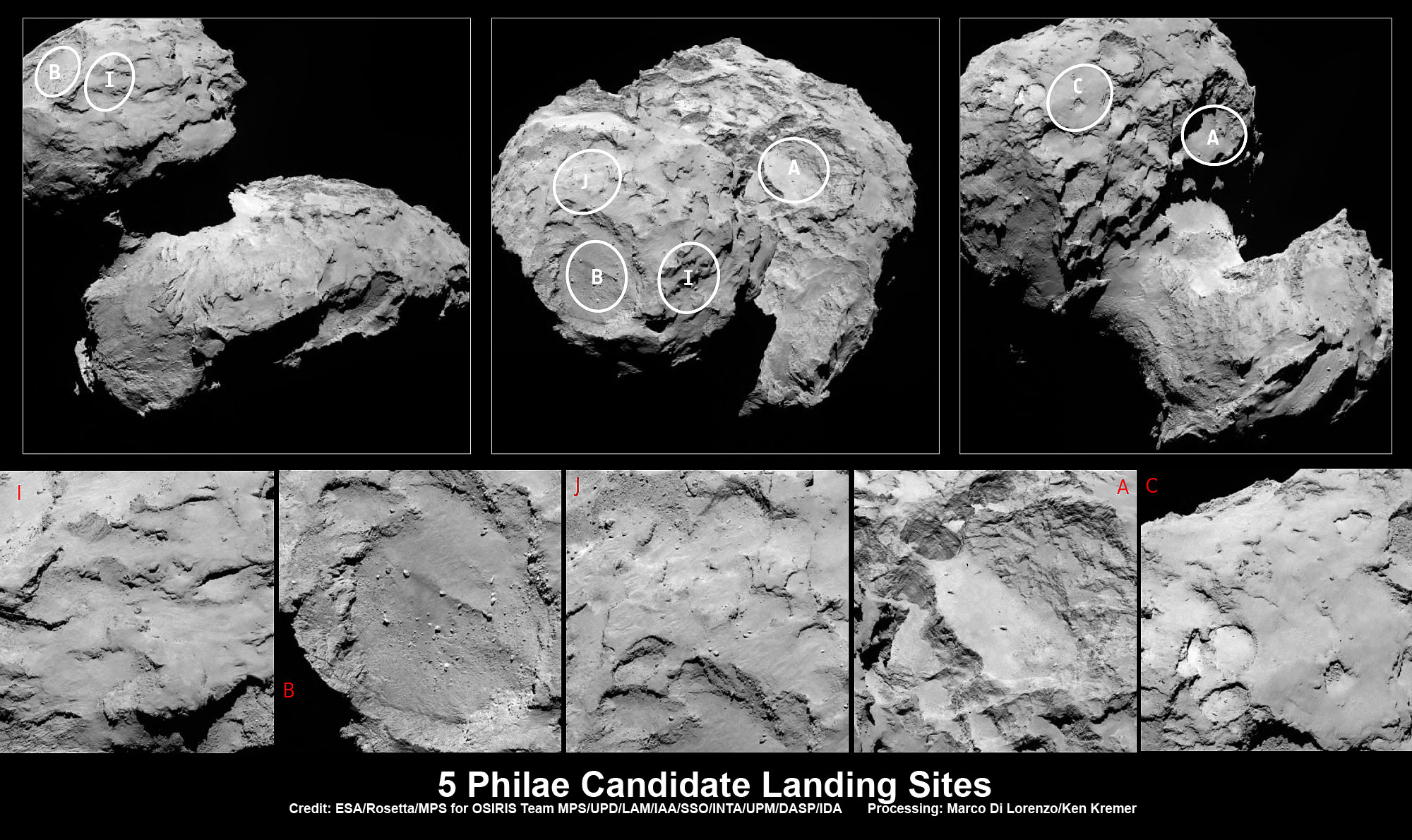
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.
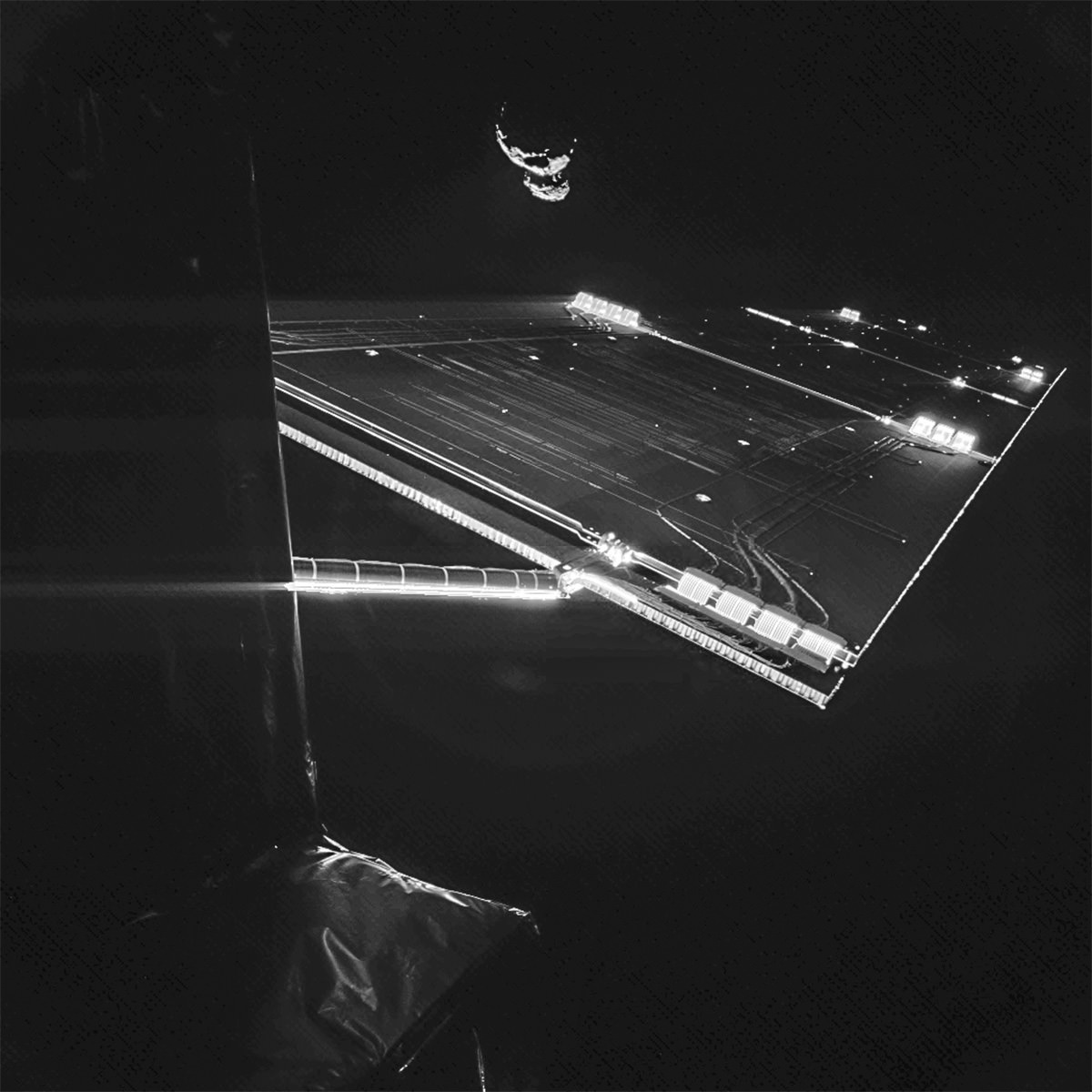
Image of Rosetta's solar array and comet 67P/C-G taken by Philae on Sept. 7, 2014 (ESA/Rosetta/Philae/CIVA)
Spacecraft “selfies” are always a treat and this one is doubly awesome: taken by the Philae lander piggybacked onto ESA’s Rosetta, it shows one of the spacecraft’s 14-meter-long (46-foot) solar arrays glinting with reflected sunlight while off in the distance is the double-lobed nucleus of Comet 67P/Churyumov-Gerasimenko!
Rosetta has been circling the comet for over a month now and returning some truly amazing images, but leave it to little Philae to put it all into perspective. Such a show-stealer! (Not that we mind, of course.)
The image above was acquired with Philae’s CIVA (Comet nucleus Infrared and Visible Analyzer) instrument on Sept. 7, 2014, from a distance of 50 km (31 miles) from Comet 67P/C-G. It’s actually a composite of two separate images made with different exposures adjusted for the lighting disparities between the spacecraft and comet.
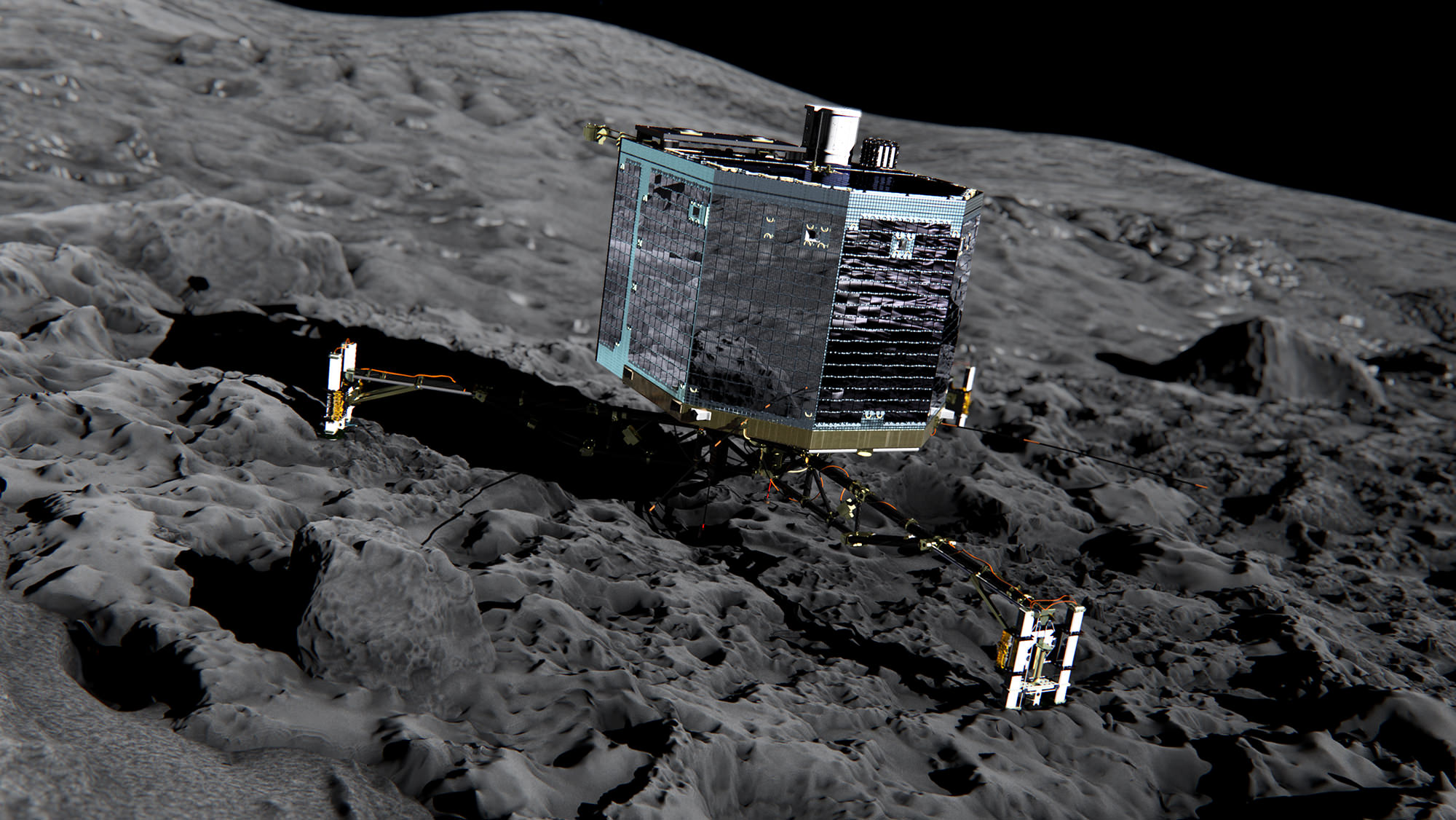
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
The Philae (say “FEE-lay”) lander itself weighs 100 kg (220 lbs) and is about a meter wide and 80 cm high (3.2 x 2.6 feet). The CIVA instrument, one of ten installed on the lander, is composed of seven miniature cameras that will take panoramic pictures of 67P’s surface and reconstruct its structure in 3D, as well as a microscope and a near-infrared imager to study its composition, texture, and reflectivity. (Source)
This is the second image from Philae this year to feature part of the Rosetta spacecraft (but the first to show the comet); the previous was taken in April 2014.
Back in 2007 Philae took a shot that showed Rosetta’s solar panel and Mars; check that one out here.
Currently Rosetta is being transitioned to its Global Mapping Phase (GMP). This is an incredibly intensive process that will determine how close the spacecraft will be able to get to the surface of the comet as engineers search for the best landing area to which to deploy Philae in November.
Learn more about the Rosetta mission and Comet 67P/C-G here.
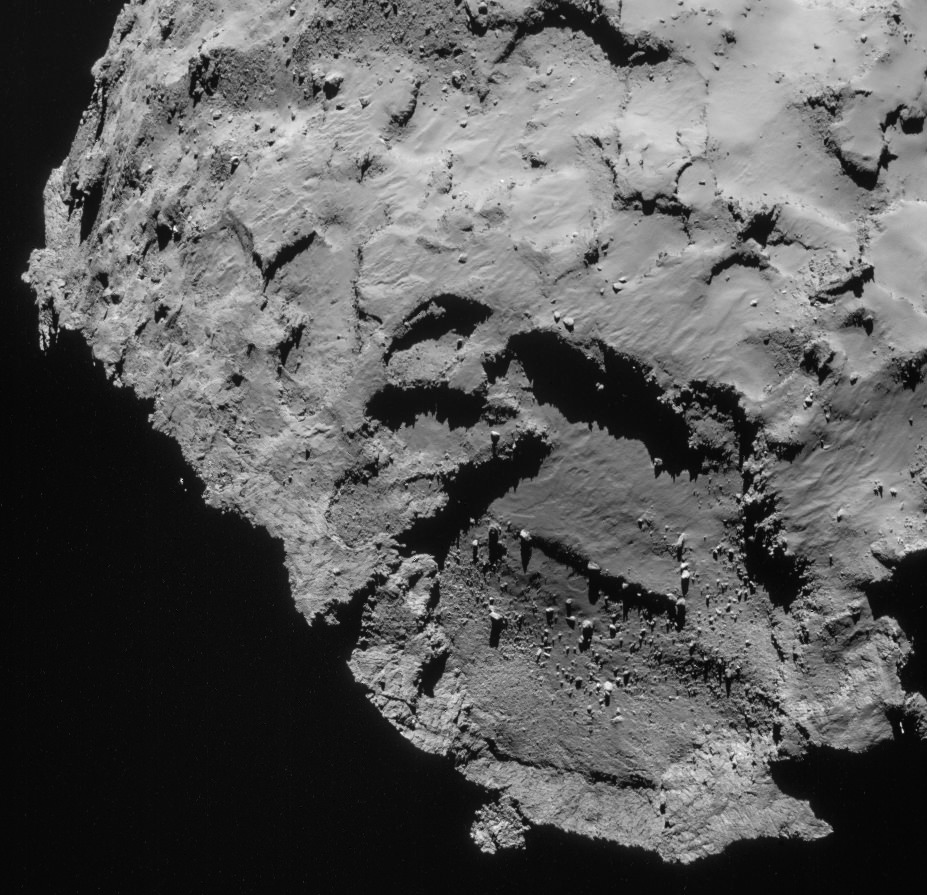
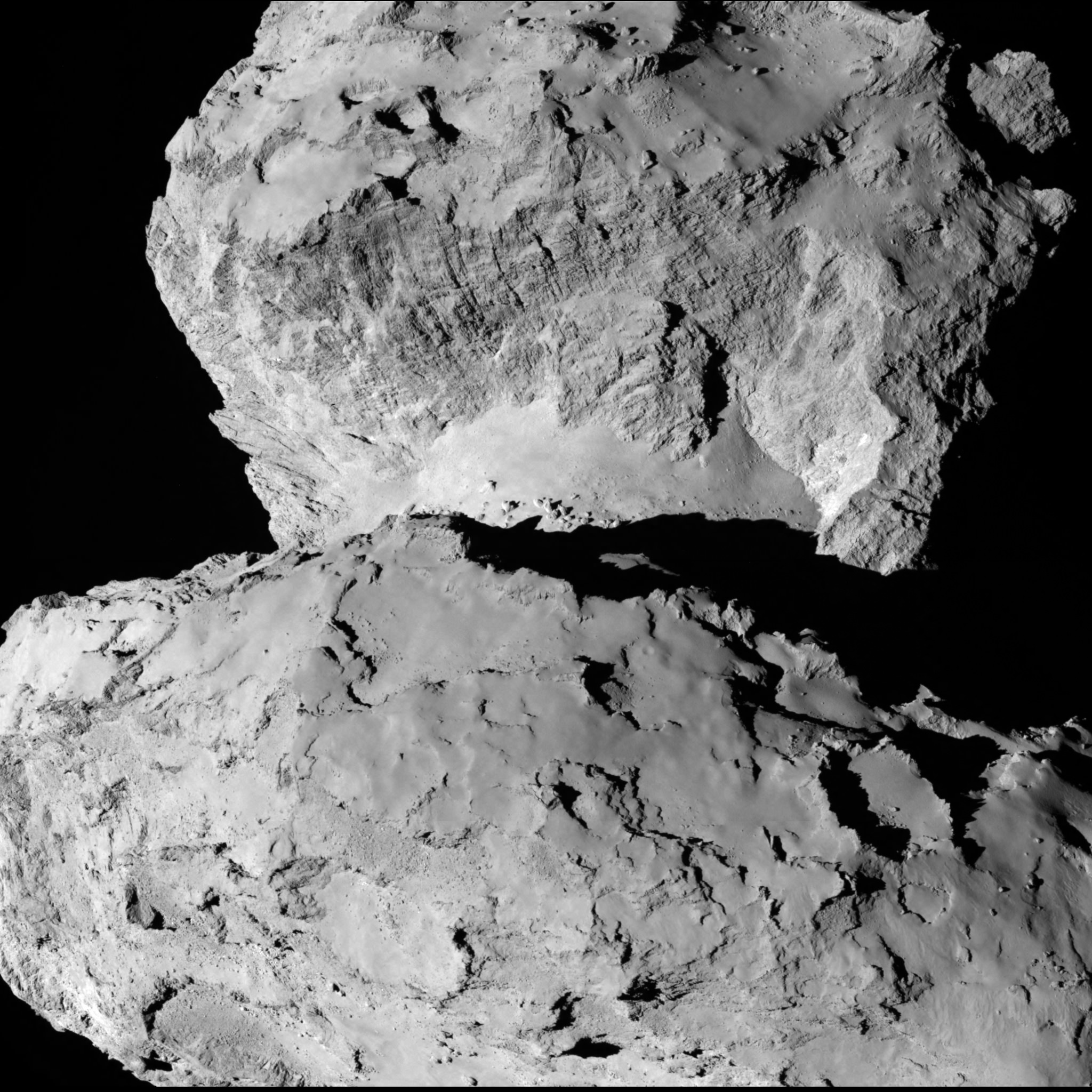
Jagged cliffs and prominent boulders are visible in this image taken by OSIRIS on 5 September 2014 from a distance of 62 kilometres from comet 67P/Churyumov-Gerasimenko. The left part of the image shows a side view of the comet’s 'body', while the right is the back of its 'head'. One pixel corresponds to 1.1 metres.
Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Today ESA released the latest high resolution images of Comet 67P/Churyumov-Gerasimenko taken by the OSIRIS science camera on Sept. 5, and is shown above.
Jagged cliffs and prominent boulders are clearly visible in unprecedented detail on the head and body of Comet 67P displaying a multitude of different terrains in the new image taken from a distance of 62 kilometers.
Meanwhile the Rosetta science team is using the OSIRIS and navcam camera images to create a preliminary map of the comets surface. The map is color coded to divide the comet into several distinct morphological regions.
Several morphologically different regions are indicated in this preliminary map, which is oriented with the comet’s ‘body’ in the foreground and the ‘head’ in the background. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
“With various areas dominated by cliffs, depressions, craters, boulders or even parallel grooves, 67P/C-G displays a multitude of different terrains. Some areas even appear to have been shaped by the comet’s activity,” the Rosetta team said in the release.
The images were also shown at today’s scientific presentations at a special Rosetta research session at the 2014 European Planetary Science Congress being held in Cascais, Portugal.
The scientists are striving to meld all the imagery and data gathered from Rosetta’s 11 instruments in order to elucidate the composition and evolution of the different regions.
The mapping data is also being used to narrow the ‘Top 5’ Philae landing site candidates down to a primary and backup choice.
The final landing site selections will be made at a meeting being held this weekend on 13 and 14 September 2014 between the Rosetta Lander Team and the Rosetta orbiter team at CNES in Toulouse, France.
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 2 September 2014 from a distance of 56 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details of the coma, especially of jets of dust emanating from the neck region.
Credits: ESA/Rosetta/NAVCAM/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
The comet nucleus is about 4 km (2.5 mi) across.
The team is in a race against time to select a suitable landing zone soon since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Four-image photo mosaic comprising images taken by Rosetta's navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across.
Credits: ESA/Rosetta/NAVCAM/Ken Kremer – kenkremer.com/Marco Di Lorenzo
See rotated version and 4 individual images below[/caption]
ESA’s Rosetta orbiter has now moved in so close to its comet quarry that the primordial body overwhelms the screen, and thus its snapping mapping mosaics to capture the complete scene of the bizarre world so it can find the most suitable spot for the momentous Philae landing – upcoming in mid-November.
In fact Rosetta has ‘drawn and quartered’ the comet to collect high resolution views of Comet 67P/Churyumov-Gerasimenko with the navcam camera on Sunday, August 31.
The navcam quartet has just been posted to the Rosetta portal today, Monday, September 1, 2014. ESA invited readers to create global photo mosaics.
See above our four frame photo mosaic of navcam images Rosetta took on Aug. 31.
The purpose of taking the images as well as spectra and physical measurements up close is to find a ‘technically feasible’ Philae touchdown site that is both safe and scientifically interesting.
Below is the Rosetta teams four image navcam montage, arranged individually in a 2 x 2 raster.
Four-image montage comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM
The navcam image raster sequence was taken from a distance of 61 km from comet 67P.
“Roughly one quarter of the comet is seen in the corner of each of the four images. The four images are taken over an approximately 20 minute period, meaning that there is some motion of the spacecraft and rotation of the comet between the images. As a result, making a clean mosaic out of the four images is not simple,” according to ESA’s Rosetta blog.
As I reported here last week, the ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet.
The potential touchdown sites were announced on Aug. 25, based on a thorough analysis of high resolution measurements collected by ESA’s Rosetta spacecraft over the prior weeks since it arrived at the pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
See our montage of the ‘Top 5’ landing sites below.
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
The new images released today are the best taken so far by the Navcam camera. The probes OSIRIS science camera are even more detailed, and will hopefully be released by ESA soon!
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The clock is ticking’ to select a suitable landing zone soon since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di LorenzoESA’s Rosetta spacecraft on final approach to Comet 67P/Churyumov-Gerasimenko in early August 2014. This collage of navcam imagery from Rosetta was taken on Aug. 1, 2, 3 and 4 from distances of 1026 km, 500 km, 300 km and 234 km. Not to scale. Credit: ESA/Rosetta/NAVCAM – Collage/Processing: Marco Di Lorenzo/Ken Kremer- kenkremer.com
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Story updated[/caption]
The ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet. See graphics above and below.
The potential touchdown sites were announce today, Aug. 25, based on high resolution measurements collected by ESA’s Rosetta spacecraft over the past two weeks since arriving at the bizarre and pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA arrival live webcast.
So ‘the clock is ticking’ to select a suitable landing zone soon as the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This past weekend, the site selection team met at CNES, Toulouse, France, and intensively discussed and scrutinized a preliminary list of 10 potential sites, and whittled that down to the ‘Top 5.’
Their goal was to find a ‘technically feasible’ touchdown site that was both safe and scientifically interesting.
“The site must balance the technical needs of the orbiter and lander during all phases of the separation, descent, and landing, and during operations on the surface with the scientific requirements of the 10 instruments on board Philae,” said ESA.
They also had to be within an ellipse of at least 1 square kilometer (six-tenths of a square mile) in diameter due to uncertainties in navigation as well as many other factors.
“For each possible zone, important questions must be asked: Will the lander be able to maintain regular communications with Rosetta? How common are surface hazards such as large boulders, deep crevasses or steep slopes? Is there sufficient illumination for scientific operations and enough sunlight to recharge the lander’s batteries beyond its initial 64-hour lifetime, while not so much as to cause overheating?” according to ESA.
Stephan Ulamec, Philae Lander Manager at DLR (German Aerospace Center) discusses landing during ESA webcast of Rosetta’s arrival at comet Comet 67P/Churyumov-Gerasimenko. Credit: ESA
The Landing Site Selection Group (LSSG) team was comprised of engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments as well as the ESA Rosetta team, which includes representatives from science, operations and flight dynamics.
“Based on the particular shape and the global topography of Comet 67P/ Churyumov-Gerasimenko, it is probably no surprise that many locations had to be ruled out,” said Ulamec.
“The candidate sites that we want to follow up for further analysis are thought to be technically feasible on the basis of a preliminary analysis of flight dynamics and other key issues – for example they all provide at least six hours of daylight per comet rotation and offer some flat terrain. Of course, every site has the potential for unique scientific discoveries.”
When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles) in front of the comet. Carefully timed thruster firings then brought it to within about 80 km distance. And it is moving far closer – to within 50 kilometers (31 miles) and even closer!
Upon arrival the comet was 522 million km from the Sun. As Rosetta escorts the comet looping around the sun, they move much closer. By landing time in mid-November they are only about 450 million km (280 million mi) from the sun.
At closest approach on 13 August 2015 the comet and Rosetta will be 185 million km from the Sun. That corresponds to an eightfold increase in the light received from the Sun.
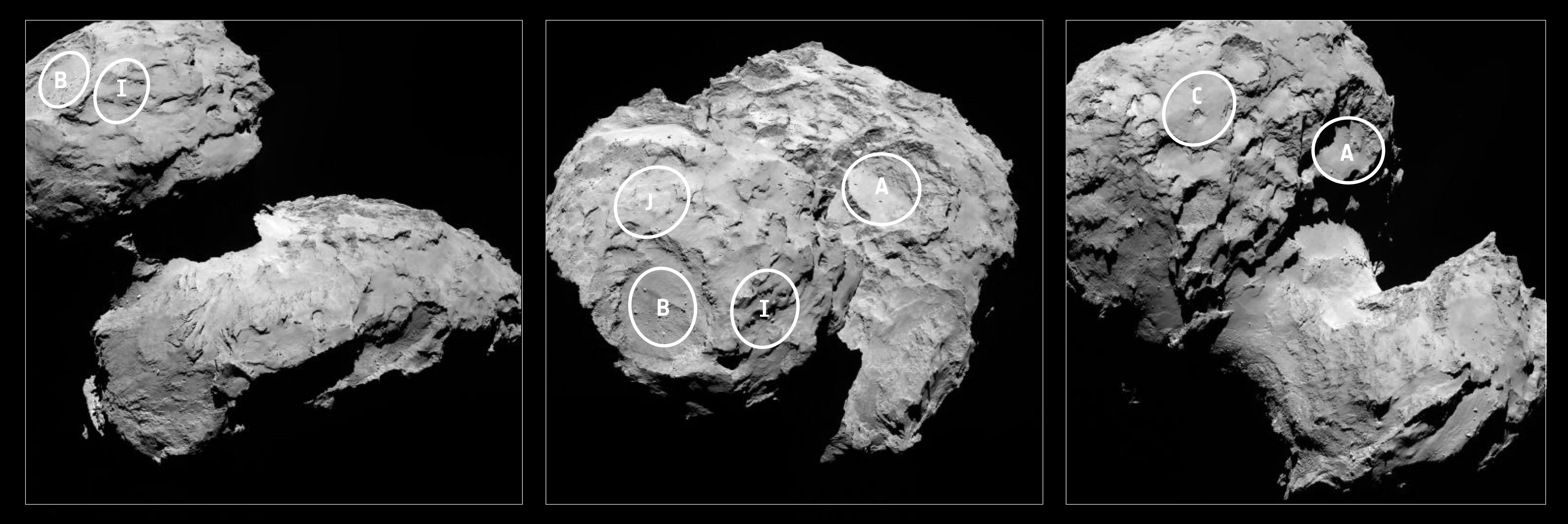
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Therefore Rosetta and Philae will simultaneously study the warming effects of the sun as the comet outgases dust, water and much more.
The short period Comet 67P/Churyumov-Gerasimenko has an orbital period of 6.5 years.
“The comet is very different to anything we’ve seen before, and exhibits spectacular features still to be understood,” says Jean-Pierre Bibring, a lead lander scientist and principal investigator of the CIVA instrument.
“The five chosen sites offer us the best chance to land and study the composition, internal structure and activity of the comet with the ten lander experiments.”
A close-up view of Comet 67P/Churyumov–Gerasimenko taken by the Rosetta spacecraft on Aug. 7, 2014. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The ‘Top 5’ zones will be ranked by 14 September. Three are on the ‘head’ and two are on the ‘body’ of the bizarre two lobed alien world.
And a backup landing site will also be chosen for planning purposes and to develop landing sequences.
The ultimate selection of the primary landing site is slated for 14 October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Why study comets?
Comets are leftover remnants from the formation of the solar system. Scientists believe they delivered a vast quantity of water to Earth. They may have also seeded Earth with organic molecules – the building blocks of life as we know it.
Any finding of organic molecules will be a major discovery for Rosetta and ESA and inform us about the origin of life on Earth.
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland KellerESA’s Rosetta Spacecraft nears final approach to Comet 67P/Churyumov-Gerasimenko in late July 2014. This collage of imagery from Rosetta combines Navcam camera images at right taken nearing final approach from July 25 (3000 km distant) to July 31, 2014 (1327 km distant), with OSIRIS wide angle camera image at left of comet’s expanding coma cloud on July 25. Images to scale and contrast enhanced to show further detail. Credit: ESA/Rosetta/NAVCAM/OSIRIS/MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Collage/Processing: Marco Di Lorenzo/Ken Kremer
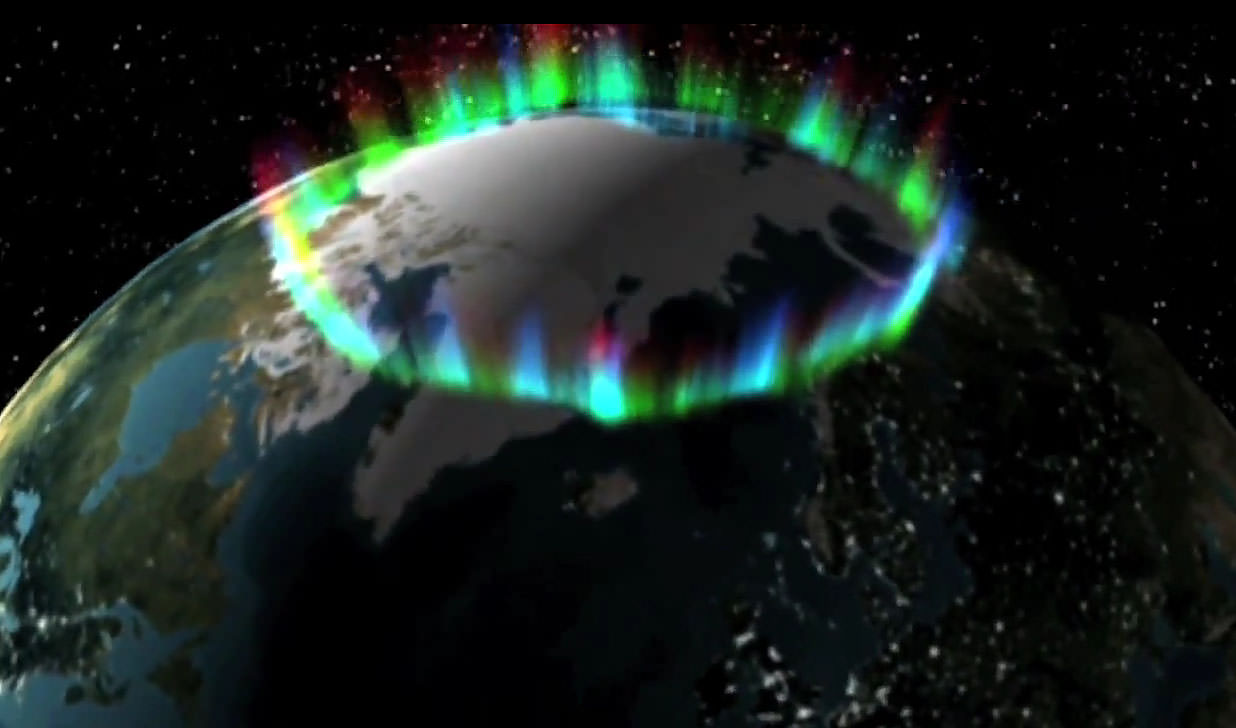
When we see an auroral arc - and associated rays - we really seeing a small section of the much larger, permanent aurora called the auroral oval. The northern oval is centered over the geomagnetic north pole located in northern Canada. Credit: NASA
Or perhaps I should say “eine grosse Aurora!” ESA astronaut Alexander Gerst made this time-lapse of a “massive aurora” as seen from the Space Station on August 24. The entire video is beautiful, showing not just a view of the ghostly green aurora but also plenty of stars, airglow, the graceful rotation of the ISS’ solar arrays, and finally the blooming light of dawn – one of sixteen the crew of the Station get to witness every day.
Then again, I’m now wondering: what is the mass of an aurora? Hmm…
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland Keller
Animation Caption: Possible landing sites on Comet 67P/Churyumov-Gerasimenko. The model shows the illumination of the comets surface and regions under landing site consideration for the Philae lander on board ESA’s Rosetta spececraft . Credit: CNES
“The race is on” to find a safe and scientifically interesting landing site for the Philae lander piggybacked on ESA’s Rosetta spacecraft as it swoops in ever closer to the heavily cratered Comet 67P/Churyumov-Gerasimenko since arriving two weeks ago after a decade long chase of 6.4 billion kilometers (4 Billion miles).
Rosetta made history by becoming the first ever probe from Earth to orbit a comet upon arrival on Aug. 6, 2014.
The probe discovered an utterly alien and bizarre icy wanderer that science team member Mark McCaughrean, of ESA’s Science Directorate, delightedly calls a ‘Scientific Disneyland.’
“It’s just astonishing,” he said during a live ESA webcast of the Aug. 6 arrival event.
Now, another audacious and history making event is on tap – Landing on the comet!
To enable a safe landing, Rosetta is moving in closer to the comet to gather higher resolution imaging and spectroscopic data. When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles). As of today, carefully timed thruster firings have brought it to within about 80 km distance. And it will get far closer.
Right now a top priority task for the science and engineering team leading Rosetta is “Finding a landing strip” for the Philae comet lander.
Philae’s landing on comet 67P is currently scheduled for Nov. 11, 2014. The 100 kg lander is equipped with 10 science instruments
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA webcast.
The team responsibility for choosing the candidate sites comprises “the Landing Site Selection Group (LSSG), which comprises engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments, and supported by the ESA Rosetta team, which includes representatives from science, operations and flight dynamics,” according to an ESA statement.
This week the team is intensively combing through a preliminary list of 10 potential landing sites.
Over the weekend they will whittle the list down to five candidate landing sites for continued detailed analysis.
ESA will announce the Top 5 landing site candidates on Monday, Aug. 25.
Where will Philae land?
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The decision rests on the results of Rosetta’s ongoing global mapping campaign, including high resolution imaging from the OSIRIS and NAVCAM cameras and further observations from the other science instruments, especially MIRO, VIRTIS, ALICE, GIADA and ROSINA.
The surface criteria for a suitable landing site include day time landing illumination, a balance between day and night to allow the solar panels to recharge the batteries, avoiding steep slopes, large boulders and deep crevasses so it doesn’t topple over.
Of course the team also must consider the comet’s rotation period (12.4 hours) and axis of rotation (see animation at top). Sites near the equator offering roughly equal periods of day and night may be preferred.
The selection of the primary landing site is slated for mid-October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Cygnus reentry [17 Aug 2014]. In 84 days Reid, Max and I will ride home inside such an amazing fireball! Credit: NASA/ESA/Alexander Gerst
Cygnus reentry [17 Aug 2014]. In 84 days Reid, Max and I will ride home inside such an amazing fireball! Credit: NASA/ESA/Alexander Gerst
Story updated[/caption]
Farewell Cygnus!
The flight of the Orbital Sciences’ Cygnus commercial cargo carrier concluded this morning, Sunday Aug. 17, in a spectacular fireball as planned upon reentry into Earth’s atmosphere at approximately 9:15 a.m. (EDT). And the fireworks were captured for posterity in a series of amazing photos taken by the Expedition 40 crew aboard the International Space Station (ISS). See astronaut photos above and below.
ESA astronaut Alexander Gerst and Russian Cosmonaut Maxim Suraev documented the breakup and disintegration of Cygnus over the Pacific Ocean east of New Zealand today following precise thruster firings commanded earlier by Orbital Sciences mission control in Dulles, VA, that slowed the craft and sent it on a preplanned destructive reentry trajectory.
Cygnus reentry on 17 Aug 2014. Credit: NASA/ESA/Alexander Gerst
Gerst was truly moved by the spectacle of what he saw as a portent for his voyage home inside a Soyuz capsule barely three months from now, with crew mates Maxim Suraev and NASA astronaut Reid Wiseman.
“In 84 days Reid, Max and I will ride home inside such an amazing fireball! In 84 Tagen werden Reid, Max & ich in solch einem Feuerball nach Hause fliegen!” – Gerst wrote from the station today in his social media accounts with the fireball photos.
Cygnus was loaded with no longer needed trash and fell harmlessly over an uninhabited area of the South Pacific Ocean.
Today’s spectacular reentry fireworks concluded the hugely successful flight of the Cygnus resupply ship named in honor of astronaut Janice Voss on the Orb-2 mission.
ISS Crew mate Max Suraev just caught this amazing photo of Cygnus Orb2 disintegrating on reentry. Credit: Roscosmos/ Max Suraev via ISS crew mate Reid Wiseman
The astronaut photos may be helpful to engineers planning the mechanics of the eventual deorbiting of the ISS at some point in the hopefully distant future.
Cygnus finished it’s month-long resupply mission two days ago when it was unberthed from the International Space Station (ISS) on Friday, Aug. 15, and station astronaut Alex Gerst released the vessel from the snares of the Canadarm2 robotic arm at 6:40 a.m. EDT.
“From start to finish, we are very pleased with the results of this mission. Our team is proud to be providing essential supplies to the ISS crew so they can carry out their vital work in space,” said Mr. Frank Culbertson, Executive Vice President and General Manager of Orbital’s Advanced Programs Group, in a statement.
Goodbye, Cygnus! Credit: NASA/ESA/Alexander Gerst
Cygnus roared to orbit during a spectacular blastoff on July 13 atop an Orbital Sciences Corp. Antares rocket on the Orb-2 mission at 12:52 p.m. (EDT) from the beachside Pad 0A at the Mid-Atlantic Regional Spaceport on NASA’s Wallops Flight Facility on the Eastern Shore of Virginia.
It arrived at the station after a three day chase and was captured with the 58-foot (17-meter) long Canadian robotic arm on July 16, 2014 by Station Commander Steve Swanson working at a robotics workstation in the cupola.
Orbital Sciences Corporation Antares rocket and Cygnus spacecraft blasts off on July 13 2014 from Launch Pad 0A at NASA Wallops Flight Facility , VA, on the Orb-2 mission and loaded with over 3000 pounds of science experiments and supplies for the crew aboard the International Space Station. Credit: Ken Kremer – kenkremer.com
Cygnus arrival at the ISS took place on the 45th anniversary of the launch of Apollo 11 on July 16, 1969 on America’s first manned moon landing mission by Neil Armstrong, Buzz Aldrin and Michael Collins.
The US/Italian built pressurized Cygnus cargo freighter delivered 1,657 kg (3653 lbs) of cargo to the ISS Expedition 40 crew including over 700 pounds (300 kg) of science experiments and instruments, crew supplies, food, water, computer equipment, spacewalk tools and student research experiments.
This mission dubbed Orbital-2, or Orb-2, marks the second of at least eight operational cargo resupply missions to the ISS under Orbital’s Commercial Resupply Services (CRS) contract with NASA.
Cygnus Orb-2 spacecraft ‘Janice Voss’ departed ISS at 6:40 a.m. EDT, Friday, Aug. 15, 2014. Credit: NASA TV
The next resupply launch of the private Cygnus Orb-3 craft atop the Orbital Sciences’ Antares rocket is currently scheduled for October 2014 from NASA’s Wallops Flight Facility, VA.
Orbital Sciences was awarded a $1.9 Billion supply contract by NASA to deliver 20,000 kilograms (44,000 pounds) of research experiments, crew provisions, spare parts and hardware for 8 flights to the ISS through 2016 under the Commercial Resupply Services (CRS) initiative.
“With three fully successful cargo delivery missions now complete, it is clear our public-private partnership with NASA is proving to be a positive asset to the productivity of the ISS. We are looking forward to the next Antares launch and the Cygnus cargo delivery mission that is coming up in about two months,” said Culbertson.
Orbital Sciences Corporation Antares rocket and Cygnus spacecraft prior to blast off on July 13 2014 from Launch Pad 0A at NASA Wallops Flight Facility , VA, on the Orb-2 mission bound for the International Space Station. Credit: Ken Kremer – kenkremer.com
Stay tuned here for Ken’s continuing ISS, Rosetta, OCO-2, GPM, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, MAVEN, MOM, Mars and more Earth & Planetary science and human spaceflight news.